1065
APLIKASI PENCARIAN JALUR TERPENDEK PADA RUMAH SAKIT UMUM
BAHTERAMAS MENGGUNAKAN ALGORITMA A* (A-STAR)
#1
Teks penuh
#1
Gambar

Dokumen terkait
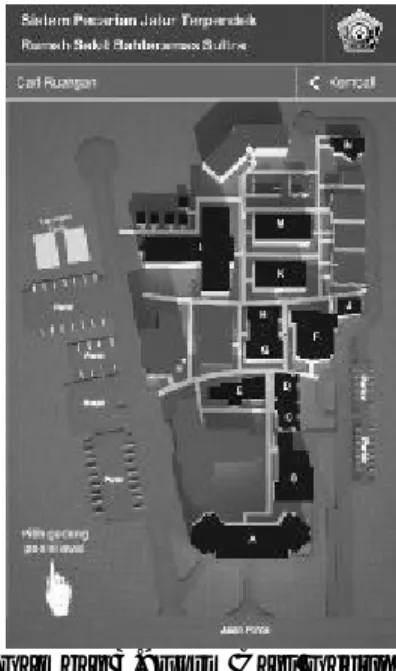
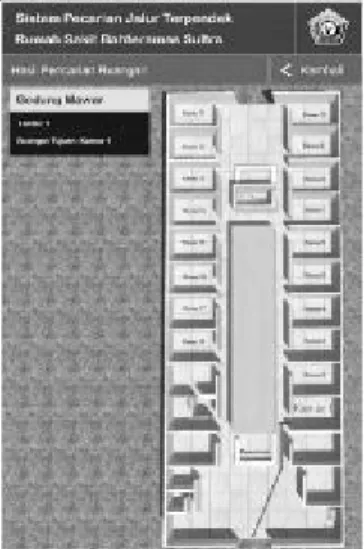
Trigger: Use case ini digunakan apabila user akan melihat mencari jalur dari shelter awal ke shelter tujuan. Typical Course
Simpulan dari penelitian ini adalah telah dihasilkan sebuah aplikasi penentu jalur terpendek menggunakan Algoritma Dijkstra, yang dapat digunakan di kota
(A-Star) untuk menentukan jalur terpendek yang bias ditempuh dari lokasi pengguna menuju pangkas rambut tujuan. Metode A-Star merupakan sebuah algoritma pencarian jarak yang
Tujuan dari penelitian ini adalah untuk membangun sistem informasi geografis pencarian SPBU terdekat dan penentuan jalur terpendek menggunakan algoritma dijkstra di
Algortima Dijkstra dapat melakukan pencarian jalur terpendek dari posis titik awal sampai titik akhir lokasi dengan keakuratan nilai jarak rata-rata 0.03% terhadap
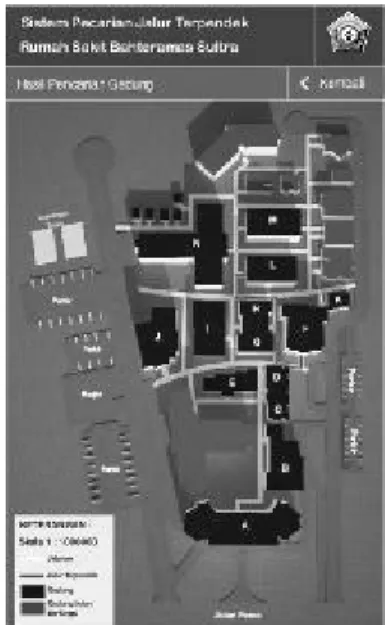
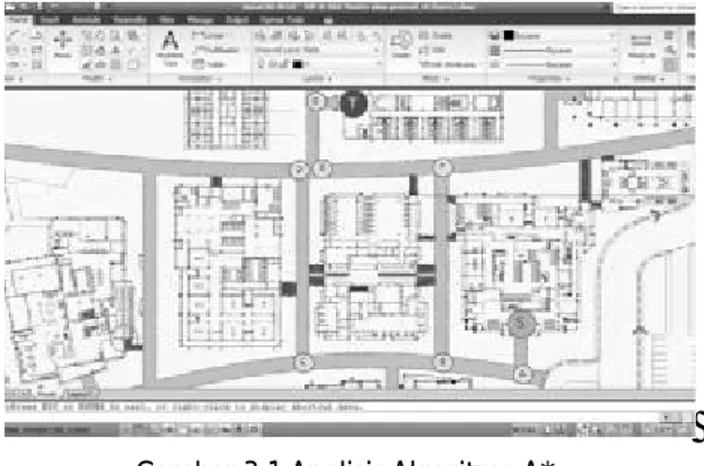
Berdasarkan Penjelasan yang telah diuraikan sebelumnya, maka akan dibangun aplikasi penulusuran jalur terpendek menggunakan algoritma A-Star dalam pencarian lokasi gedung
menggunakan algoritma floyd warshall (studi kasus kota singkawang) yang bertujuan untuk mencari jalur terpendek untuk menuju tempat wisata yang ada di Kota Singkawang.
Setelah dilakukan beberapa percobaan pada proses pencarian jalur terpendek dengan menggunakan metode artificial bee colony, pada Gambar 14 dapat dilihat grafik perbedaan populasi yang