SKRIPSI
Untuk memenuhi persyaratan mencapai derajat Sarjana Strata S1
Disusun Oleh :
Ilham Pratama NIM : 10010006
JURUSAN TEKNIK ELEKTRO
SEKOLAH TINGGI TEKNOLOGI ADISUTJIPTO
YOGYAKARTA
Tugas akhir ini penulis persembahkan kepada
Ayah dan Ibu tercinta,
yang selalu memberikan motivasi dan do’a restunya
kepada penulis, Semoga Allah SWT akan membalas
semua kebaikan dan keikhlasannya dan selalu
melimpahkan rahmat dan hidayah kepadanya dan kita
semua. Aamiin….
Uda Haris, Uda Iin, Uda Aan, Agung, Dara, Taufik, yang
selalu memberi motivasi kepada penulis untuk segera
menyelesaikan skripsi. Keluarga besar penulis di rumah yang
senantiasa memberi dukungan dan motivasi.
Igga Chardiola Arma seseorang yang memberikan
semangat dalam pembutan skripsi ini dan dukungan
serta Do’a kepada penulis.
Teman IMMSY, serta teman – teman elektro
angkatan 2010 yang seperjuangan salama
menempuh dan menimba ilmu di Sekolah Tinggi
vi
tidak melalui rintangan, bukanlah menang kalau tidak dengan
pertarungan, bukanlah lulus kalau tidak ada ujian, dan bukanlah
berhasil kalau tidak berusaha
Orangtua memberikan pembekalan dan pelajaran
yang berharga untuk anaknya, mencapai kesuksesan
dan keinginan yang di impikan oleh anaknya
Hargailah usaha mu apapun itu hasilnya, karna itu keinginan dan
langkah yang dilakukan
Sekecil apapun itu bentuknya dan sekicil apa itu hasilnya itu usaha sendiri.
Pilihan yang baik pilihan yang anda pernah ambil untuk diri anda. Jangan
mengatakan itu salah dan jangan pernah menyesal, penyesalan hanya membuat
vii
Puji syukur Penulis sampaikan kehadirat Allah SWT yang telah memberikan rahmat dan hidayah-nya kepada kita semua. Sehingga dapat menyelesaikan penyusunan tugas akhir di teknik elektro STTA dengan sebaik-baiknya.
Tugas akhir dengan judul “ Perancangan dan Pembuatan Sistem Kendali Miniatur Lift 3 Lantai Berbasis Programamble Logic Controller ” , yang penulis susun dalam bentuk sebuah karya tulis, merupakan syarat mutlak untuk menyelesaikan jenjang studi srata satu (S1). Pada kesempatan ini penulis ingin mengucapkan terima kasih kepada semua pihak yang telah membantu, antara lain :
1. Orang tua tercinta yang telah memberikan dukungan baik moral maupun spiritual dalam pembuatan Tugas Akhir ini.
2. Bapak Tabri Santoso SIP., selaku ketua STTA Yogyakarta.
3. Bapak Ir. Daniel Teguh Rudianto, M.T, selaku Ketua Jurusan Teknik Elektro Sekolah Tinggi Teknologi Adisutjipto Yogyakarta.
4. Bapak Ir.Bambang Sudibya, M.T., selaku dosen pembimbing I yang telah memberikan pengarahan dan bantuan didalam penyelesaian Tugas Akhir ini.
5. Bapak Denny Dermawan ST, M.Eng., selaku dosen pembimbing II yang telah memberikan pengarahan dan bantuan di dalam penyelesaian Tugas Akhir ini.
6. Kepada Andhika yang telah membantu proses pembuatan alat Tugas Akhir ini.
7. Khusus kepada Igga Chadiola Arma kekasih tersayang yang telah memberikan semangat, dan ketenangan kepada penulis untuk menyelesaian Tugas Akhir ini.
viii persatu.
9. Kepada semua teman – teman IMMSY yang telah memberikan canda dan tawa disela waktu.
10.Kepada semua teman – teman jurusan Teknik Elektro dan Angkatan 2010 khususnya.
11.Dan kepada semua pihak yang tidak bisa di sebutkan semua, yang telah membantu dalam menyelesaikan Tugas Akhir ini.
Pada akhirnya penulis berharap bahwa karya tulis ini, selain berguna untuk melengkapi syarat dalam mencapai gelar kesarjanaan, juga dapat bermanfaat bagi perkembangan kemajuan STTA selanjutnya.
Yogyakarta, Agustus 2015 Penulis
ix
Pernyataan Keaslian ... iii
Halaman Persembahan ... iv
Halaman Motto... v
Kata Pengantar ... vi
Daftar Isi ... ix
Daftar Gambar ... xii
Daftar Tabel ... xiv
Abstrak ... xv Abstract ... xvi BAB I PENDAHULUAN 1.1. Latar Belakang ... 1 1.2. Rumusan Masalah ... 2 1.3. Batasan Masalah ... 2 1.4. Tujuan Penelitian ... 3 1.5. Manfaat penelitian ... 3 1.6. Keaslian Penulisan ... 3 1.7. Sistematika Penulisan .. ... 4
BAB II LANDASAN TEORI 2.1. Tinjauan Pustaka ... 5
2.2. Teori Dasar Progammable Logic Controller (PLC) ... 6
2.3. Struktur Dan Peralatan Pelengkap PLC ... 7
2.4. Cara Kerja PLC ... 9
2.5. Konsep Perancangan Sistem Kendali PLC ... 10
2.6. Bahasa Pemograman ... 11
2.7. Pengalamatan Pada PLC ... 11
2.8. Peralatan Input PLC ... 12
2.9. Peralatan Output PLC ... 13
x
BAB III METODE PERANCANGAN
3.1. Tinjauan Umum Perancangan ... 21
3.2. Teknik Pengumpulan Data ... 21
3.3. Tempat Penelitian ... 22
3.4. Objek Penelitian ... 22
3.5. Cara Kerja Lift Pada PLC ... 22
3.6. Prosedur Perancangan Lift up and down. ... 23
3.7. Alat dan Bahan ... 24
3.8. Pembuatan Hardware ... 24
3.8.1.Pembuatan Kerangka Utama Lift 3 lantai ... 25
3.8.2. Pemasangan Jalur Pada kerangka utama Lift ... 27
3.8.3. Pembuatan Cabbin Lift ... 27
3.8.4. Pembuatan Panel Kendali Lift 3 lantai ... 29
3.9. Pemasangan Komponen ... 29
3.9.1. Pemasangan Indicator Keberadaan Cabin Lift ... 30
3.9.2. Pemasangan Indicator Tujuan, Tombol Car Call, dan OpenClose pintu Lift ... 31
3.9.3. Pemasangan Tombol Hall Call... 32
3.9.4. Pemasangan Motor Up and Down dan Motor Pintu... 33
3.9.5. Pemasangan Limit Switch Lantai 1, 2, dan 3 ... 34
3.9.6. Pemasangan Buzzer ... 34
3.9.7. Input dan Output Pada Lift ... 35
3.9.8. Pemasangan Kabel Pada Panel PLC ... 36
3.9.9. Panel Kontrol Lift ... 39
3.10. Hasil Perancangan Lift ... 42
3.11. Pembuatan Software ... 43
3.12. Langkah - langkah Program Kontrol PLC ... 44
3.13. Pembuatan Program Kontrol PLC ... 45
xi
4.1.2. Pengujian Tombol Hall Call 2 (dua) ... 58
4.1.3. Pengujian Tombol Hall Call 3 (tiga) ... 59
4.1.4. Pengujian Tombol Hall Call 2 Turun ... 60
4.2. Pengujian Dan Hasil Saklar Tujuan (Car Call) ... 61
4.2.1. Pengujian Saklar CarCall 2 Up ... 61
4.2.2. Pengujian Saklar CarCall 3 Up ... 62
4.2.3. Pengujian Saklar CarCall 2 Down ... 64
4.2.4. Pengujian Saklar CarCall 1 ... 66
4.2.5. Pengujian Open Dan Close Pintu ... 68
4.3. Pengujian Sistem Keseluruhan ... 69
BAB V PENUTUP 5.1. Kesimpulan ... 72
5.2. Saran ... 72
DAFTAR PUSTAKA ... 74
xii
Gambar 2.3. Saklar dan limit switch ... 13
Gambar 2.4. Motor, buzzer dan Led ... 13
Gambar 2.5. Relay 24 volt 5 pin ... 14
Gambar 2.6. Symbol contact relay ... 14
Gambar 2.7. Mesin lift gearles. ... 17
Gambar 2.8. Lift dengan motor ... 18
Gambar 2.9. Kerangka lift Prototipe. ... 19
Gambar 2.10. Bentuk sisi luar lift penumpang. ... 20
Gambar 2.11. Tombol luar lift dan dalam lift . ... 20
Gambar 3.1. Diagram alur perancangan. ... 25
Gambar 3.2. Ukuran kerangka utama ... 26
Gambar 3.3. Kerangka utama ... 26
Gambar 3.4. Jalur lift ... 27
Gambar 3.5. Desain cabbin lift ... 28
Gambar 3.6. Cabbin lift 3 lantai ... 28
Gambar 3.7. Panel kendali lift 3 lantai. ... 29
Gambar 3.8. Blok diagram lift 3 lantai ... 30
Gambar 3.9. Indicator keberadaan cabbin lift. ... 31
Gambar 3.10. Indicator tujuan, tombol CC dan ppen, close pintu. ... 32
Gambar 3.11. Tombol HC 1, HC 2, Dan HC 3 ... 32
Gambar 3.12. Motor up and down dan motor open and close ... 33
Gambar 3.13. Limit switch... 34
Gambar 3.14. Buzzer... 34
Gambar 3.15. Input dan output. ... 35
Gambar 3.16. Pemasangan kabel komponen pada panel PLC. ... 39
Gambar 3.17. Panel kendali lift ... 40
Gambar 3.18. Pemasangan kabel konektor ke PLC ... 41
Gambar 3.19. Conecntor panel kendali lift ke PLC Omron ... 42
xiii
Gambar 3.25. Pemilihan CPU type PLC.. ... 47
Gambar 3.26. Halaman Penulisan Ladder Diagram... 47
Gambar 3.27. Pembuatan ladder diagram ... 48
Gambar 3.28. Pembuatan 1 Pengontrolan panel PLC lift ... 48
Gambar 3.29. Pembuatan 2 pengontrolan panel PLC lift ... 49
Gambar 3.30. Pembuatan 3 Pengontrolan panel PLC lift ... 49
Gambar 3.31. Eksekusi program pada lantai 1 ... 51
Gambar 3.32. Eksekusi program lantai 2 naik ... 52
Gambar 3.33. Eksekusi program lantai 3 naik ... 53
Gambar 3.34. Eksekusi program lantai 2 turun... 54
Gambar 3.35. Eksekusi program PLC pintu close ... 55
Gambar 3.36. Eksekusi program PLC pintu open... 55
Gambar 4.1. Hall call 1 lift... 57
Gambar 4.2. Hall call 2 up lift ... 58
Gambar 4.3. Hall call 3 lift... 59
Gambar 4.4. Hall call 2 down lift ... 60
Gambar 4.5. Proses car call 2 naik ... 61
Gambar 4.6. Proses kerja lift terhadap saklar tujuan 2 ... 62
Gambar 4.7. Proses permintaan pada saklar tujuan 3 up ... 63
Gambar 4.8. Prose lift 3 lantai tombol CC 3 up ... 64
Gambar 4.9. Proses kinerja lift 2 down ... 65
Gambar 4.10. Prose lift 3 lantai tombol CC 2 down ... 66
Gambar 4.11. Proses kinerja lift 1 down ... 67
Gambar 4.12. Proses lift 3 lantai tombol CC 1 down ... 68
xiv
Table 2.2. Program PLC OMRON ... 12
Table 2.3. Perbedaan alamat PLC ... 12
Tabel 3.1. Input dan keterangan ... 36
Tabel 3.2. Output dan keterangan ... 36
Table 3.3. Komponen pada lift 3 lantai ... 38
Tabel 3.4. Simbol – simbol panel kendali ... 41
Table 4.1. Permintaan tombol hall call 1 ... 57
Tabel 4.2. Permintaan tombol hall call 2 ... 58
Tabel 4.3. Permintan tombol hall call 3 ... 59
Tabel 4.4. Permintaan tombol hall call 2 naik ... 60
Tabel 4.5. Pengujian tombol hall call... 69
Tabel 4.6. Kombinasi tombol car call ... 70
Jurusan Teknik Elektro STT Adisutjipto Yogyakarta
Abstrak
Lift merupakan transportasi vertical, yang digunakan untuk mengangkut sesuatu benda dari bawah ke atas atau dari atas ke bawah. Lift banyak dijumpai di gedung - gedung bertingkat seperti mall, hotel, kantor dan rumah sakit (RS). Maka dirancang berupa lift penumpang. Lift ini dirancang berbentuk miniatur lift 3 lantai terdapat tombol Hall Call, Car Call, Emmergecy, tombol pintu open dan close, Buzzer serta Indicator.
Miniatur lift 3 lantai ini dikendalikan oleh PLC OMRON CP1E. Miniatur lift 3 lantai dilengkapi rangkaian seperti, motor DC 24V untuk menggerakan naik dan turun cabbin lift, motor DC 12V untuk menggerakan pintu cabbin lift, limit switch sebagai sensor di lantai 1, 2, dan 3. Perancangan miniatur lift 3 lantai ini terdapat input dan output yang terhubung pada panel kendali lift 3 lantai.
Dari hasil perancangan miniatur lift 3 lantai dan pembuatan sistem kendali berkerja sesuai yang diinginkan. Sistem kendali lift naik dan turun dirancang secara manual. Permintaan lift dilakukan baik lantai 1, 2 dan 3. Apabila lift dalam proses menuju ke lantai tujuan dan permintaan di lantai lain, maka permintaan tersebut diabaikan.
Kata kunci : PLC Omron CP1E, Lift 3 lantai, Hall Call, Car Call, Motor DC 24V, dan Motor DC 12V.
Ilham Pratama
Department of Electrical Engineering STT Adisutjipto Yogyakarta
Abstract
The elevator is a transportation vertical, used for haul an object from under to over or from over to under. Lift often found in buildings such as mall, hotel, office and hospital.it is designed as a passenger lift. The is lift designed in the of prototype 3 lift floors there is switch Hall Call, Car Call, Emergency, Open and Close door button, Buzzer and Indicator.
Prototype lift 3 floors is controlled by PLC OMRON CP1E. Prototype 3 Lift floor equipped circuit as, motor DC 24V is for driver up and down cabbin lift. Motor DC 12V is for driver the door open and close, limit switch as sensor in floor 1, 2, and 3. Designed prototype 3 lift floor the are input and output that to lift controlled 3 floor.
From the results of the model design and development prototype 3 lift floor control system works as desired. Lift system control up and down designed is done manually. When the lift move to the right floor there is a demand on another floor then the request is ignored.
Keywords : PLC Omron CP1E, Lift 3 Floor, Car Call, Hall Call, Motor DC 24V, and Motor DC 12V
BAB I PENDAHULUAN
1.1 Latar Belakang
Pada dasarnya teknologi merupakan sesuatu yang dirancang oleh manusia untuk kebutuhan, sehingga dapat dipergunakan dengan maksimal untuk menunjang kebutuhan kehidupan. Zaman telah berubah peralatan teknologi berkembang pesat dikancah dunia, sehingga manusia dituntut untuk mengembangkan pola pikir mencapai suatu hasil yang baik. Alat yang telah dirancang maupun alat yang telah jadi, menuntut manusia untuk mengembangkan suatu ide kreatif dalam suatu pembuatan atau perancangan.
Perkembangan teknologi erat kaitannya antara dunia indutsri dan dunia pendidikan, seorang tenaga pengajar diperkuliahan mempunyai andil yang besar untuk meningkatkan dan mengembangkan ilmu pengetahuan, ilmu otomatisasi terhadap peserta didiknya. Untuk dapat memenuhi tuntutan tersebut, maka dibutuhkan sebuah alat bantu peraga guna memperlancar proses pembelajaran.
PLC adalah Programmable Logic Controller, artinya pengontrol atau pengendali yang dapat diprogram ulang kembali. PLC merupakan suatu unit yang secara khusus dirancang untuk menangani suatu sistem kontrol otomatis pada mesin – mesin industri ataupun aplikasi lainnya.
PLC perangkat yang memprogram kinerja suatu alat yang akan dirancang sehingga dapat dioperasikan, yang nantinya disimpan pada memori internal untuk menjalankan suatu fungsi logika, aritmatika, dan fungsi waktu dengan cara membuat program dan di input pada perangkat eloktronika PLC. Adapun fungsi lainnya memantau proses kinerja alat pada monitor, yang mana program telah berjalan pada suatu alat yang dikendalikan pada waktu alat mulai berjalan.
Pada skripsi ini merancang suatu alat yang nantinya dapat digunakan untuk bahan ajar di perkuliah maupun dimasyarakat, dan diaplikasikan pada kebutuhan di dunia industri. Alat yang dirancang dipergunakan dalam suatu industri, dan gedung bertingkat memudahkan operasi perkerjaan untuk mencapai tepat yang diinginkan.
Perancangan dan pembuatan sistem kendali minatur lift 3 lantai berbasis Programmable Logic Controller (PLC). Dengan alat ini memudahkan untuk pengetahuan dalam dunia teknik.
Lift dirancang dengan model mini yang terdiri 3 lantai terdapat tombol up dan down pengendalian berbasis PLC. Setiap pergerakan lift menuju tepat yang diinginkan tombol ditekan baik turun dan naik pada setiap lantai, menampilakan suatu informasi dengan menggunakan Led baik lantai 1, 2 dan 3 yang menyatakan kereberadaan saat ini.
Pada skripsi ini perancangan model lift up and down menggunakan pemprograman PLC dengan tenaga penggerak motor, karena model lift ini difokuskan pada gerak keja dengan tenaga penggerak motor DC.
1.2 Rumusan Masalah
Berdasarkan pada latar belakang yang ada, maka dapat dirumuskan masalah sebagai berikut, yaitu:
1. Perancangan dan pembuatan miniatur lift 3 lantai.
2. System kontrol liftdirancang dengan PLC OMRON SYSMAC CP1E. 3. Pengontrolan kendali lift 3 lantai Up dan Down pada PLC.
1.3 Batasan Masalah
Mengingat banyaknya masalah yang harus dihadapi dalam proses pembuatan model lift ini, maka lebih lanjut akan dibatasi lebih spesifik lagi mengenai perancangan pembuatan model lift ini. Adapun batasan masalahnya adalah :
1. Model lift yang dirancang adalah lift 3 lantai berbentuk mini dan mekanisme penggerak menggunakan motor listrik.
2. Pengaturan control lift 3 lantai menggunakan PLC dan lift 3 lantai bergerak secara manual naik dan turun.
3. Program untuk lift menggunakan OMRON SYSMAC CP1E dan PLC
1.4 Tujuan Penelitian
Skripsi dengan judul Peracangan pengendalian model lift up and down berbasis Programmable Logic Controller (PLC) mempunyai tujuan sebagai berikut:
1. Mengetahui perancangan dan pembuatan kendali lift 3 lantai menggunakan PLC.
2. Menjelaskan mekanisme kinerja lift up and down saat program telah berjalan.
3. Mengetahui sistemprogram kontrol lift dan sebagai bahan ajar.
1.5 Manfaat Penelitian
Manfaat penelitian tugas akhir sebagai berikut:
1. Merancang dan membuat hardware miniatur lift 3 lantai. 2. Membuat ladder diagram lift 3 lantai menggukan PLC.
1.6 Keaslian Penulisan
Dalam penelitian ini digunakan beberapa referensi yang berhubungan dalam objek penelitan. Referensi buku – buku internet yang berhubungan dengan penelitian dan juga di peroleh dari literatur - literatur hasil penelitian yang telah digunakan.
Pada pembahasan Tugas Akhir yang menggunakan acuan dari. Perancangan program simulasi lift sebagai alat bantu pembelajaran algoritma Look. (Youllia Indrawaty 2011), Perancangan simulator lift gedung 6 Lantai menggunakan mikrokontroller ATmega 8535, (Steven 2004), Sistem panel kendali lift schinder berbasis Programmable Logic Controller (Asep Saepuloh 2010), Programable Logic Controller (PLC) digunakana untuk merancang pengaturan lift, (Alaexander Irwan Sutikno 2001), Desain dan simulasi lift 4 lantai berbasis PLC OMRON CP1L, (Aventia 2011), Implenmentasi mikrokontroler sebagai pengendali lift 4 lantai. ( Jihad 2011), Prototipe sistem pengendali dan
monitoring lift berbasis mikrokontroler dengan pemograman VB. NET, (Jony 2013), Membangun Prototipe sistem pengendali lift berbasis mikrokontroler ATmega 8535 menggunakan bahasa C, ( Junia 2010), Rancangan bangun miniatur lift Pratikum matakuliah PLC dan mekatronika, (Agusnandar 2008).
Pada penelitian ini lebih menekankan sistem perancangan dan pembuatan kendali lift 3 lantai berbasis PLC, sistem penggerak lift menggunakan motor Dc yang berkerja menarik dan ulur cabbin lift. Program PLC sebgai kendali proses gerak kinerja lift.
1.7 Sistematika Penulisan
Dalam penyusunan penulisan tugas akhir ini, penulis menjabarkan bab - bab yang disesuaikan dengan sistematika penulisan di antaranya sebagai berikut : BAB I : PENDAHULUAN
Pada bab ini, dijelaskan tentang latar belakang masalah, rumusan masalah, batasan masalah, tujuan penulisan, manfaat penulisan, dan sistematika penulisan.
BAB II : LANDASAN TEORI
Bab ini menjelaskan tentang kajian pustaka, konsep dasar Programmable Logic Control (PLC), dan sistem lift.
BAB III : METODOLOGI PERANCANGAN.
Bab ini berisikan tentang penjelasan Tinjauan umum perancangan, teknik pengumpulan data, dan Proses perancanganl lift.
BABIV : HASIL DAN PEMBAHASAN
Pada bab keempat ini berisikan tentang penjelasan dan hasil pembuatan alat peraga model liftserta pengujian alat dan program.
BAB V : KESIMPULAN DAN SARAN.
Bab ini berisi pernyataan singkat dan jelas sesuai dengan apa yang diperoleh selama penelitian.
BAB II
LANDASAN TEORI
2.1 Tinjauan Pustaka
Youllia Indrawaty 2011, Perancangan program simulasi lift sebagai alat bantu pembelajaran algoritma Look. Algoritma Look adalah algoritma penjadwalan disk pada sistem operasi yang memiliki prinsip kerja sesuai dengan namanya, yaitu seolah – olah seperti dapat melihat apakah di depan arah pergerakannya masih ada permintaan atau tidak. Pada umumnya prinsip kerja lift diidentikan dengan algoritma, maka pada penelitian ini akan dibangun program simulasi lift dengan menerapkan algoritma. Pada lift terdapat 2 aspek utama yang dapat ditinjau, yaitu komponen pembangun serta prinsip kerja dalam mengeksekusi antrian permintaan. Karena beragamnya komponen pada lift dan terdapat beberapa objek yang memiliki prilaku sama maka diperlukan metode analisis berorientasi objek untuk mendapatkan komponen - komponen yang dibutuhkan dalam program simulasi lift yang di bangun.
Steven 2004, Perancangan simulator lift gedung 6 Lantai menggunakan mikrokontroller ATmega 8535. Dalam perancangan mikrokontroller ATmega 8535 digunakan sebagai pengendali kecepatan motor. Motor yang dikendalikan ini berfungsi untuk menaik turunkan lift ke lantai tujuan. Selain sebagai pengatur kecepatan motor, Atmega 8535 juga mengatur waktu menunggu, dan daya angkut lift. Pada Tugas Akhir ini dilakukan pengujian terhadap simulasi lift yang dibuat lantai 6. Hasil yang ingin dicapai adalah liftdapat berpindah dari lantai yang satu ke lantai yang lainna secara halus, dan presisi pada perhentian. Hal yang paling terakhir yang mungkin ingin dikembangkan setelah semuana berjalan adalah ingin menciptakan prosedur keamanan lift.
Asep Saepuloh 2010, Sistem panel kendali lift schindler berbasis Programmable Logic Controller (PLC). Sesuai dengan perkembangan ilmu pengetahuan teknologi lift berupa komponen mekaniknya ataupun sistem kendalinya telah banyak mengalami perubahan dan inovasi. Sistem kendali lift beralih menggunakan sistem digital programmable logic controller (PLC). Telah
dilakukan modernisasi panel kendali tiga dari empat unit lift menjadi berbasis PLC. Dengan sistem tersebut operasi lift dapat diatur kecepatan geraknya pada setiap lantai. PLC adalah merupakan otak dari alat tersebut yang berfungsi untuk mengatur dan mengkoordinasi cara kerja lift. Dalam perencanaan sistem ini selain menggunakan i/o juga analog output dan Fuzzy logic. Sesuai prinsip logika relay, PLC akan mengolah program secara urut dan kontinyu (loop) sehingga menghasilkan sebuah program berupa kondisi on / off internal coil output yang disimpan dalam data memory output dan latch memory. Aplikasi PLC pada lift menunjukkan unjuk kerja lift semakin baik.
2.2 Teori Dasar Progammable Logic Controller (PLC)
Pada tahun 1968, para ahli di General Motors Corporation’s Hydramatic menghendaki bahwa sistem - sistem kendali yang digunakan hendaknya lebih fleksibel dan memenuhi syarat - syarat sebagai berikut :
1. Sistemnya harus modern yang bersifat solid state. 2. Fleksibilitas komputer.
3. Mampu menangani kondisi - kondisi industri yang sulit. 4. Pemprograman yang sederhana dan mudah.
5. Kemudahan dalam maintenance oleh para enginer dan teknisi.
Kemampuan untuk dapat digunakan kembali dalam aplikasi lain dimasa yang akan datang. Dengan kemajuan teknologi, penggunaan PLC yang hampir sama majunya dengan komputer-komputer canggih diharapkan dapat mempunyai beberapa kelebihan - kelebihan lain, diantaranya :
1. PLC yang sederhana dapat mengendalikan berbagai situasi industri dari hanya satu gerakan, pekerjaan tingkat tinggi hingga aplikasi - aplikasi yang melibatkan manipulasi kompleks.
2. Program - program dapat dimodifikasi dengan cepat untuk menerima kondisi yang baru sehingga tidak ada lagi pemasangan ulang kabel dan dapat menekan biaya.
3. Setelah program selesai ditulis dan diuji maka dapat didesain dengan mudah kesejumlah PLC lainnya.
4. Mempunyai kecepatan waktu respon.
5. Dimungkinkan antarmuka (interface) khusus yang dapat diakses seperti display seven segmen, input / output analog dan fasilitas perhitungan dengan kecepatan tinggi.
6. Memungkinkan pemantauan grafis suatu sistem pengendali, dan lain-lainnya.
2.3. Struktur Dan Peralatan Pelengkap PLC
Pada umumnya PLC dapat dibayangkan sebagai sebuah personal komputer konvensional karena konfigurasi internal yang ada pada PLC mirip dengan konfigurasi yang dimiliki oleh sebuah personal komputer. Akan tetapi dalam hal khusus PLC dirancang untuk pembuatan panel kontrol (panel listrik).
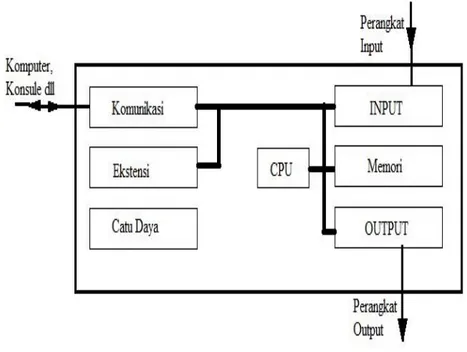
Secara khusus, PLC dirancang untuk mengganti suatu sistem kontrol otomatis pada mesin - mesin industri atau aplikasi-aplikasi lain diindustri seperti kontrol lampu lalu lintas, air mancur, sistem bagasi lapangan terbang, lift pada gedung, penyiraman lapangan golf otomatis. Struktur PLC pada gambar 2.1.
Gambar 2.1. Struktur PLC
Secara garis besar struktur dasar PLC dapat dibagi menjadi beberapa bagian yaitu:
1. CPU (Central Processing Unit)
yaitu otak dari PLC yang mengerjakan berbagai operasi, antara lain mengeksekusi program, menyimpan dan mengambil data dari memori, membaca kondisi / nilai input serta mengatur nilai output, memeriksa adanya kerusakan (self diagnostic), serta melakukan komunikasi dengan perangkat lain. Dalam CPU sebuah PLC dapat diibaratkan sebagai kumpulan ribuan relay walaupun dalam kenyataannya bukan berarti terdapat ribuan relay berskala kecil. Tetapi dalam PLC berisi rangkaian elektronika digital yang berfungsi sebagai kontak normally open (NO) dan kontak normally close (NC) relay. Kontak NO dan NC pada PLC dapat digunakan berkali - kali untuk semua jenis instruksi dasar PLC kecuali instruksi output. Instruksi output sebuah PLC tidak dapat dilakukan untuk nomor kontak yang sama.
2. Input
bagian PLC yang berhubungan dengan perangkat luar yang memberikan masukan kepada CPU. Input dapat berupa saklar - saklar atau sensor - sensor. Dari sekian banyak peralatan input yang dipakai diantaranya push button, Limitswitch, flow switch, dan saklar tekan lainnya.
3. Output
Merupakan bagian PLC yang berhubungan dengan perangkat luar yang memberikan keluaran dari CPU. Perangkat luar output dapat berupa motor, Led display, lampu penerang, buzzer, dan lain sebagainya.
4. Memori
Yaitu tempat untuk menyimpan program dan data yang akan dijalankan dan diolah oleh CPU. Dalam pembahasan PLC, memori sering disebut file. Dalam PLC memori terdiri atas memori program untuk menyimpan program yang akan dieksekusi, memori data untuk menyimpan nilai - nilai hasil operasi CPU, nilai timer dan counter, serta memori yang menyimpan nilai kondisi input dan output.
5. Fasilitas komunikasi
Yaitu fasilitas yang membantu CPU dalam melakukan pertukaran data dengan perangkat lain, termasuk juga berkomunikasi dengan komputer untuk melakukan pemrograman dan pemantauan.
6. Fasilitas ekstensi
Untuk menghubungkan modul PLC dengan modul pengembangan input/output sehingga jumlah terminal I/O dapat ditingkatkan.
7. Catu daya
Untuk menyuplai daya kepada semua komponen dalam PLC. Catu daya PLC adalah 24 V DC. Struktur PLC terdapat pada gambar 2.1.
2.4. Cara Kerja PLC
PLC beroperasi secara continue dalam 3 langkah (disebut satu scan) cara kerja PLC seperti gambar 2.2.
Gambar 2.2. Cara kerja PLC
(Sumber : Prototipe lift 4 lantai dengan PLC)
Setiap scan terdiri atas : 1. Input scan PLC
Membaca nilai / kondisi dari terminal input dan menyimpannya dalam memori input. Pengolahan nilai input selanjutnya didasarkan pada nilai pada memori input. Hal ini dimaksudkan agar nilai input tetap konsisten selama 1 scan. Apabila terjadi perubahan nilai input maka baru akan berpengaruh pada scan
berikutnya. Namun terdapat instruksi khusus apabila hendak mengambil nilai langsung dari terminal input.
2. Solve logic.
Selanjutnya PLC mengeksekusi program satu demi satu menggunakan nilai pada memori input dan memperbarui nilai pada memori output. Pemrograman PLC difokuskan pada bagian ini.
3. Output scan.
Terakhir PLC mengeluarkan nilai dari memori output ke terminal output dan selanjutnya ke perangkat luar output. Setiap scan memerlukan waktu yang berbeda tergantung pada panjangnya program yang diterapkan, namun secara umum berlangsung sangat cepat.
2.5. Konsep Perancangan Sistem Kendali PLC
Dalam merancang suatu sistem kendali dibutuhkan pendekatan-pendekatan sistematis dengan prosedur sebagai berikut :
1. Rancangan sistem kendali
Dalam tahapan ini perancang harus menetukan terlebih dahulu sistem apa yang akan dikendalikan dan proses bagaimana yang akan ditempuh. Sistem yang akan dikendalikan dapat berupa peralatan mesin ataupun proses terintegrasi yang sering secara umum disebut controlled system.
2. Penentuan I/O
Pada tahap ini semua piranti masukan dan keluaran eksternal yang akan dihubungkan PLC harus ditentukan.
3. Perancangan program (Program design)
Setelah ditentukan Input dan Output maka dilanjutkan dengan proses merancang program dalam bentuk ladder diagram dengan mengikuti aturan dan urutan operasi sistem kendali.
4. Menjalankan sistem (Run The System)
Pada tahapan ini perlu dideteksi adanya kesalahan satu persatu (debug), dan menguji secara cermat sampai kita memastikan bahwa sistem aman untuk dijalankan.
2.6. Bahasa Pemprograman
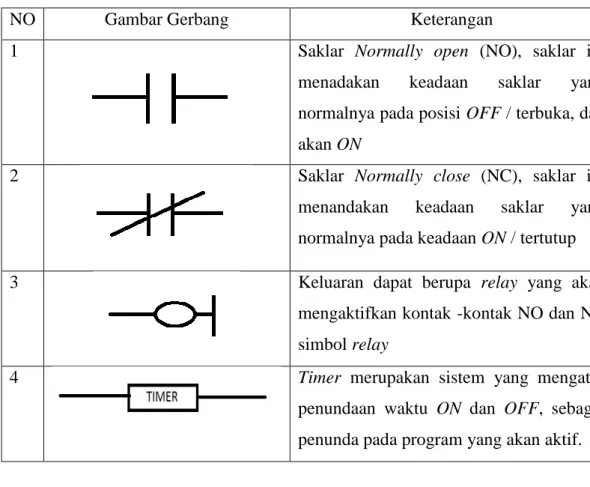
Beberapa bahasa program yang digunakan PLC antara lain ladderdiagram, block diagram, dan statetment list, PLC dilengkapi memori sebagai penyimpanan intruksi internal untuk menjalankan fungsi logika, pencacah, urutan proses, aritmatika, dan timer. Program aplikasi dimasukkan kedalam PLC kontrol melalui piranti pemrograman yang berupa komputer atau handheld console. Ladder diagram tersusun dari beberapa simbol - simbol yang hampir sama dengan relay – relay mekanik yaitu : Saklar Normally open (NO), saklar Normally close (NC), Coil, dan Timer dapat dilihat pada tabel 2.1.
Tabel 2.1. Gerbang NO, NC, Coil dan Timer
NO Gambar Gerbang Keterangan
1 Saklar Normally open (NO), saklar ini
menadakan keadaan saklar yang
normalnya pada posisi OFF / terbuka, dan akan ON
2 Saklar Normally close (NC), saklar ini
menandakan keadaan saklar yang
normalnya pada keadaan ON / tertutup
3 Keluaran dapat berupa relay yang akan
mengaktifkan kontak -kontak NO dan NC simbol relay
4 Timer merupakan sistem yang mengatur
penundaan waktu ON dan OFF, sebagai penunda pada program yang akan aktif.
2.7. Pengalamatan Pada PLC
Pada PLC untuk masukan dan keluaran diberikan alamat sesuai dengan tipe dan jenis dari PLC tersebut. Pengalamatan pada PLC OMRON dengan PLC
Mitsubhisi tidaklah sama yang dijelaskan pada tabel 2.2 program PLC OMRON dan tabel 2.3 perbedaan alamat PLC.
Tabel 2.2. Program PLC OMRON
(Sumber : Prototipelift 4 lantai dengan PLC)
Ladder PLC OMRON Keterangan
LD OUT: A, OUT: X X akan On jika saklar A ditekan
LD NOT: A, OUT: X X akan Off jika saklar A ditekan
LD: A, AND: B
OUT: X
X akan On jika saklar A dan B ditekan
LD: A, AND NOT: B, OUT: X
X akan On jika saklar A ditekan
LD: A, OR NOT: B
AND: C, OUT: X
X akan On jika saklar C ditekan atau X akan On jika saklar A dan C di tekan LD: A, LD: B, OR: C,
AND LD, OUT: X
X akan On jika saklar A dan B ditekan atau X akan On jika saklar A dan C ditekan
Tabel 2.3. Perbedaan alamat PLC (Sumber : Prototipelift 4 Lantai dengan PLC)
I/O CPM 1A (OMRON) CQM1/CQM1 OMRON MITSUBHISI
INPUT 0000–00NN (4 DIGIT) 00000-000NN (5 DIGIT) X000-X00N OUTPUT 1000-10NN (4 DIGIT) 10000-100NN (5 DIGIT) Y000-Y00N
2.8. Peralatan Input PLC
Peralatan input sebagai perangkat komponen aktif yang bekerja memberikan perintah terhadap yang diinginkan. Contoh perangkat input, switch atau saklar, dan push button. Contoh sensor: limit switch. Dapat dilihat keterangan gambar Saklar dan limit swithinput pada gambar 2.3.
Gambar 2.3. Saklar dan limit swith
2.9. Peralatan Output PLC
Output sebagai perangkat yang menampilkan hasil yang diperintah dari input sebagai contoh, Led, Motor DC, dan buzzer output dapat dilihat pada gambar 2.4.
Gambar 2.4. Motor, buzzer dan Led
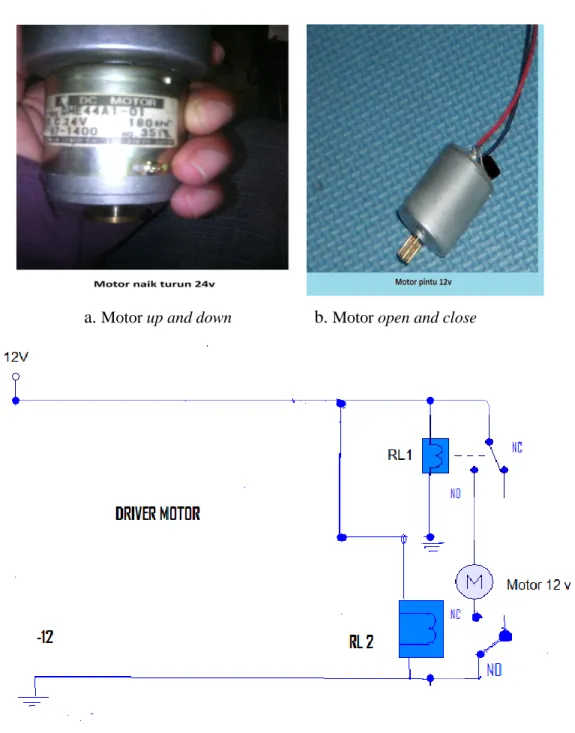
2.10 Driver Motor Utama Lift 3 Lantai Naik Dan Turun
Motor yang digunakan adalah motor penggulung kertas mesin photo copy dengan input 24V dan Rpm 180. Driver motor menggunakan relay sebagai mengatur putaran motor. Relay yang digunakan 24V 5 pin. Motor utama pada lift dengan percobaan bisa mengangkat barang ± 2 Kg. Pengontrolan pada motor DC menggunakan 2 relay sebagai driver motor supaya motor bisa bekerja untuk memutar bolak – balik. Keterangan relay 24V 5 pin dapat dilihat pada gambar 2.5.
Gambar 2.5. Relay 24V 5 pin
Keterangan pada relay 24 Volt 5 pin:
a. 85 adalah kaki pengendali relay kutub negative. b. 86 adalah kaki pengendali relay kutub positif. c. 87a dan 87 adalah pennerima arus.
d. 30 sumber arus yang dikendalikan oleh relay. Relay memiliki contact point terdiri dari:
a. Normally open (NO) yaitu kondisi awal dalam kondisi terbuka (open). b. Normally close (NC) yaitu kondisi awal sebelum diaktifkan selalu
dalam posisi tertutup.
Sedangkan fungsi relay itu sendiri digunakan untuk menjalankan fungsi logika, penundaan waktu (time delay fuction), adapun lainnya melingdungi motor dari kelebihan tegangan. Simbol contact relay dapat dilihat pada gambar 2.6.
Gambar 2.6. Simbol contact relay 2.11. Sejarah Lift
Lift adalah angkutan transportasi vertikal yang digunakan untuk mengangkut orang atau barang. Lift umumnya digunakan di gedung - gedung bertingkat tinggi, biasanya lebih dari tiga atau empat lantai. Lift pada zaman modern mempunyai tombol - tombol yang dapat dipilih penumpangnya sesuai
lantai tujuan mereka, Terdapat tiga jenis mesin, yaitu hidrolik, Traxon atau katrol tetap, dan hoist atau katrol ganda, jenis hoist dapat dibagi lagi menjadi dua bagian, yaitu hoist dorong dan hoist tarik.
Lift sering disebut elevator, yang merupakan alat angkut untuk mengangkut orang atau barang dalam suatu bangunan yang tinggi. Lift dapat dipasang untuk bangunan yang tingginya lebih dari 4 lantai, karena kemampuan orang untuk naik turun dalam menjalankan tugasnya hanya mampu dilakukan sampai 4 lantai. Lift awalnya adalah derek yang terbuat dari tali. Pada tahun 1853, Elisha Graves Otis, salah seorang pionir dalam bidang lift, memperkenalkan lift yang menghindarkan jatuhnya ruang lift jika kabelnya putus. Rancangannya mirip dengan suatu jenis mekanisme keamanan yang masih digunakan hingga kini.23 Maret 1857 - lift Otis pertama dipasang di New York City. 1880 - lift listrik pertama, dibuat oleh Werner von Siemens. 2004 - Pemasangan lift penumpang tercepat di dunia, di gedung Elevator penumpang pertama dipasang oleh Otis di New York pada tahun 1857. Setelah meninggalnya Otis pada tahun 1861, anaknya, Charles dan Norton mengembangkan warisan yang ditinggalkan oleh Otis dengan membentuk Otis Brothers pada tahun 1867.
2.12. Macam – macam Lift
Lift dapat dibagi menjadi beberapa bagian, yaitu: 1.Lift penumpang.
2. Lift barang atau dumb waiter. 3. Lift service.
4. Lift hidrolik. 1. Liftpenumpang
Lift penumpang ini merupakan lift yang sifatnya berfungsi dan sangat khusus untuk manusia saja, lift ini sangat dijaga kehandalannya, keamanan dan keselamatan manusianya.
2.Lift Barang atau Dumb Waiter
Lift ini sangat khusus fungsinya untuk barang saja, lift ini juga tak kalah handalnya dengan lift penumpang namun ada sedikit perbedaan dalam sistem keamanannya.
3. Lift Service
Lift service ini biasanya dipasang diperhotelan, yaitu fungsinya untuk pelayan - pelayan hotel untuk mengantarkan barang ke kamar - kamar penghuni hotel. Namun disini pula lift ini tak kalah handalnya dengan lift penumpang, perbedaan dari lift service dengan lift penumpang ini sangat jelas dari sistem pengangkutannya, yaitu lift penumpang hanya khusus untuk manusia saja tapi lift service ini juga berfungsi sebagai pengangkutan manusia dan barang.
4. LiftHidrolik
Lift hidrolik ini sangat lain darpada yang lain, ini dilihat dari cara kerjanya dan juga fisiknya. Lift ini biasanya digunakan oleh pasukan pemadam kebakaran dan kapasitas daya angkutnya pun sangat terbatas, lift hidrolik ini sekarang tidak hanya dipakai oleh pemadam kebakaran saja. Sekarang lift hidrolik sering dipakai oleh perusahaan telekomunikasi, bengkel - bengkel kendaraan bermotor dan lain-lain.
2.13. Cara Kerja LiftSecara Umum
Pada sistem geared atau gearless (yang masing - masing digunakan pada instalasi gedung dengan ketinggian menengah dan tinggi), kereta elevator tergantung di ruang luncur oleh beberapa steel hoist ropes, biasanya dua puli katrol, dan sebuah bobot pengimbang (counter weight). Bobot kereta dan counter weight menghasilkan traksi yang memadai antara puli katrol dan hoist ropes sehingga puli katrol dapat menggegam hoist ropes dan bergerak serta menahan kereta tanpa selip berlebihan. Kereta dan counter weight bergerak sepanjang rel yang vertikal agar mereka tidak berayun-ayun.
1. Mesin
dapat dilihat pada gambar 2.11. Mesin untuk menggerakkan elevator terletak di ruang mesin yang biasanya tepat di atas ruang luncur kereta. Untuk
memasok listrik ke kereta dan menerima sinyal listrik dari kereta ini, dipergunakan sebuah kabel listrik multi - wire untuk menghubungkan ruang mesin dengan kereta. Ujung kabel yang terikat pada kereta turut bergerak dengan kereta sehingga disebut sebagai kabel bergerak (traveling cable).
2. Jalur Lift (Hoistway) dan ruang mesin di atasnya 1651
Mesin geared memiliki motor dengan kecepatan lebih tinggi dan drive sheave dihubungkan dengan poros motor melalui gigi – gigi dikotak gigi, yang dapat mengurangi kecepatan rotasi poros motor menjadi kecepatan drive - sheave rendah. Mesin gearless memiliki motor kecepatan rendah dan puli katrol penggerak dihubungkan langsung ke poros motor.
3.
Sistem pergerakan lift dengan GearlessPada sistem hidrolik (terutama digunakan pada instalasi di gedung rendah, dengan kecepatan kereta menengah), kereta dihubungkan ke bagian atas dari piston panjang yang bergerak naik dan turun di dalam sebuah silinder. Kereta bergerak naik saat oli dipompa ke dalam silinder dari tangki oli, sehingga mendorong piston naik. Kereta turun saat oli kembali ketangki oli. Aksi pengangkatan dapat bersifat langsung (piston terhubungkan ke kereta) atau roped (piston terikat ke kereta melalui rope) Mesin Lift Gearles terdapat pada gambar 2.7.
Gambar 2.7. Mesin lift gearles
(Sumber: google.com)
Pada kedua cara tersebut, pekerjaan pengangkatan yang dilakukan oleh pompa motor (energi kinetik) untuk mengangkat kereta ke elevasi yang lebih tinggi sehingga membuat kereta mampu melakukan pekerjaan (energi potensial).
Transfer energi ini terjadi setiap kali kereta diangkat. Ketika kereta diturunkan. Gerakan naik dan turun kereta elevator dikendalikan oleh katup hidrolik. Lift hidrolik ini mempunyai karakteristik:
1. Tidak mengakibatkan tambahan beban di puncak bangunan 2. Hanya digunakan untuk kecepatan yang relative rendah 3. Hanya digunakan untuk lantai yang jumlahnya sedikit 4. Sangat baik untuk mengangkut beban berat
5. Alas lantai kereta dapat berada pada level bangunan secara tepat 6. Tidak membutuhkan beban pengimbang (counter weight )
7. Menimbulkan suara yang lebih berisik dibandingkan dengan lift yang digerakkan oleh motor traksi.
Pada lift terdapat sebuah penempatan motor untuk menarik dan mengulur sebuah cabbin lift dengan motor terdapat pada gambar 2.8.
Motor Di Atas Motor Di Bawah
Gambar 2.8. Liftdengan motor (Sumber: Rancangan bangun,PDF)
1. Prototype of Double Front Side Elevator
Lift atau Elevator merupakan alat transportasi secara vertical dan mempunyai prinsip dasar mekatronika yang memiliki bagian mekanik, elektronik dan sistem kontrol. Elevator sendiri sudah mengalami berbagai perubahan bentuk serta jenisnya, khususnya elevator double front side (lift dengan pintu dua muka). Suatu alat tercipta karena adanya kebutuhan, begitu juga dengan double front side
elevator. Banyak perusahaan membutuhkan lift dengan pintu di kedua sisinya, seperti hotel atau rumah sakit atau bangunan lainnya yang menuntut penggunaan elevator double front side ini.
Besarnya penggunaan lift jenis ini dikarenakan banyaknya desain bangunan yang mana menuntut efisiensi tanpa mengesampingkan fungsi dari bagunan dimana elevator itu sendiri berada atau tujuan dari penggunaan elevator itu sendiri. Seperti halnya penggunaan lift jenis ini di rumah sakit, yang semata demi kenyamanan pengunjung atau pasien agar dimudahkan aksesnya untuk menuju fasilitas yang diinginkannya atau dokter yang ingin dirujuk, atau pada suatu hotel yang mana desain bangunan dibuat sesuai dengan tata letak ruang yang sesuai dengan fungsinya dan saling berbeda tiap lantainya. Lift prototipe dapat dilihat pada gambar 2.9.
Gambar 2.9. Kerangka liftprototipe (Sumber: Sistem lift UNDIP)
Keterangan pada gambar 2.9. liftprototipe : 1. Rangka
2. Ruang penumpang (Car-lift) 3. Box Controller
4. Motor utama 5. Car Call 6. Hall Call
7. Pulley
8. Counter Weight 9. Rail
10. Penggulung 11. Gear Penggulung
Pada sebuah liftterdapat beberapa tombol yang bekerja untuk permintaan, yang dimana ada tombol luar hall call terdapat pada gambar. 2.10.
Gambar 2.10. Bentuk sisi luar lift penumpang
(sumber: google.com)
Tombol luar dan dalam liftsebagai permintaan tujuan setiap lantai, yang dapat dilihat pada gambar 2.11.
Gambar 2.11. Tombol luar liftdan dalam lift
Perancangan dilakukan untuk mengetahui lebih jauh tentang sistem PLC dan cara kerja lift up and down serta menganalisa sistem kerja PLC pada pemodelan lift up and down yang akan dirancang.
Perancangan ini dibuat pertama kali dengan membuat model lift up and down yang digerakkan oleh motor DC. Motor DC yang menggerakkan sistem kerja lift up and down dikontrol secara langsung oleh PLC, sehingga perancangan ini dapat difokuskan pada gerak lift up and down, termasuk juga gerakan membuka, menutupnya pintu, naik dan turun cabbin lift up and down seperti yang terdapat pada sitem kinerja lift.
3.2 Teknik Pengumpulan Data
Pengumpulan data yang dilakukan penulis sebagai sarana penunjang dalam penyusunan tugas akhir ini adalah menggunakan metode pendekatan, yaitu sebagai berikut :
1. Metode Observasi
Metode observasi merupakan proses pengambilan data dan informasi yang dibutuhkan melalui pengamatan dan pencatatan dengan sistemaika terhadap kejadian yang ditemukan dilapangan pada perancangan yang sudah dilakukan. 2. Metode Studi Literatur
Metode studi literatur merupakan suatu pengambilan data yang dilakukan oleh pembelajaran dari berbagai sumber media cetak maupun elektronik, yang berkaitan dengan pembahasan yang sedang dilakukan oleh penulis, yang berfungsi sebagai sarana penunjang dalam pengerjaan tugas akhir.
3. Metode Wawancara
Metode ini merupakan suatu cara pengambilan data yang dilakukan penulis dengan melakukan tanya jawab terhadap narasumber yang disarasankan
memiliki kemampuan dan keahlian tersendiri didalam penguasaan bidang yang akan dikaji.
4. Metode Analisis Data
Metode analisa adalah proses dari penyusunan data yang telah didapat agar mudah dipahami dan dimenegerti melalui suatu pendekatan - pendekatan tersendiri sehingga menghasilkan output yang akurat dan valid kebenarannya untuk sebuah data yang diperlukan dalam penyusunan tugas akhir ini. Data tersebut diperoleh dari hasil pengamatan data observasi, literatur maupun wawancara yang kemudian dianalisa menjadi sebuah data deskriptif.
5. Metode Percobaan.
Metode percobaan ini dilakukan untuk merancang program kontrol kendali. Percobaan dilakukan terhadap hasil pemprograman sehingga didapatkan sebuah program yang bisa mengontrol kerja dari lift up and down.
3.3 Tempat Penelitian
Penelitian dilakukan di Laboratorium Praktek Sekolah Tinggi Tekhnologi Adisutjipto, dengan kegiatan meliputi penelusuran literatur melalui internet dan buku - buku, penelitian pendahuluan, pembuatan program, analisis output, pengolahan data dan penyusunan laporan.
3.4 Objek Penelitian
Sesuai dengan tujuan penelitian yang telah diuraikan maka objek penelitian dalam penyusunan Tugas Akhir ini meliputi:
1. Perancangan lift 3 lantai kendali PLC.
2. Proses kerja motor lift up and down yang di kendalikan oleh PLC. 3. Memprogram PLC dan perangkat kinerja pada lift up and down.
3.5 Cara Kerja Lift Pada PLC
Sistem kerja lift pada PLC terdiri dari input dan output untuk menjalankan sitsem pada lift tersebut, dapat dijelaskan lift bekerja secara berurutan dari latai 1, 2, dan 3 maupun sebaliknya. Apabila terjadi permintaaan bersamaan disaat lift
berjalan, lift akan menyelesaikan permintaan yang pertama dan selanjutnya. Sehingga saat lift berkerja teratur.
Setiap permintaan akan dieksekusi sesuai urutan 1, 2, dan 3. Setiap lantai mempunyai indicator sebagai penanda dan buzzer berbunyi telah mencapai tujuan.Indicator di dalam bilik penanda tujuan yang di tuju oleh penumpang.
Lift 3 lantai menpunyai pintu pada cabbin, ditutup baik secara manual oleh penumpang dengan menekan tombol close atau open, dan tombol darurat untuk mematikan lift secara paksa dan alarm lift akan berbunyi ketika terjadi kesalahan atau bahaya disaat tombol darurat diketan. Lift dikendalikan dengan PLC omrom, input dan output berjalan sesuai permintaan yang telah dirancang.
3.6 Prosedur Perancangan Lift Up and Down.
Tahap perancangan model lift up and down dengan kendali PLC menggunakan metode continue yang berarti penentuan ide kemudian dilanjutkan dengan proses pembuatan alat sesuai dengan bagiannya agar memudahkan proses perakitan, hal ini dilakukan agar tidak terjadi kekacauan dalam bekerja dan kesalahan dalam merangkai komponen. Tahap - tahap Perancangan :
1. Membuat desain alat dan rangkaian. 2. Pembuatan kerangka utama.
3. Pembuatan lift.
4. Pengujian kepresisian lift up and down. 5. Pembuatan jalur bilik lift.
6. Pembuatan tombol up and down untuk lift. 7. Pembuatan pintu lift up and down.
8. Pengujian kepresisian pintu lift up and down. 9. Pemasangan kabel-kabel.
10.Proses pemasangan badan lift..
11.Pembuatan program PLC pengontrol lift up and down.
3.7 Alat dan Bahan
Proses pembuatan lift membutuhkan alat dan bahan sebagai berikut. Alat :
a.Cutter b.Penggaris c.Obeng dan Tang d.Gunting e.PLC Omron CP1E f.Saklar g. Limit swith h.Led i. Buzzer j. Limit switch k.Motor Dc l.Pin Konektor
Bahan untuk pembuatan lift 3 lantai sebagai berikut : a.Almunium batangan b.Dobble tip c.Kabel d.Mur e.Lem f.Triplek 3.8. Pembuatan Hardware
Pembutan hardware dilakuan untuk Pembuatan model lift 3 lantai dengan kontrol PLC ini terlebih dahulu dibuat gambar secara manual baik ukuran dan tata letak komponen. Kemudian dilanjutkan dengan realisasi pembuatan alat. Namun yang didesain dan dibuat bukanlah sama (ukuran dan bentuk) dengan lift yang sesungguhnya pada pada gedung-gedung bertingkat, melainkan pemodelan alat
yang menyerupai lift sebenarnya dengan memfokuskan pada proses sistem up dan down. Dapat dilihat diagram alur pembuatan hardware pada gambar 3.1.
Gambar 3.1. Diagram alur perancangan
3.8.1 Pembuatan Kerangka Utama Lift 3 lantai
Kerangka merupakan penopang dari kedudukan dan tata letak suatu komponen. kerangka utama menggati bagian dari bangunan lift. Sehingga Lift berfunggsi sesuai dengan kerja yang ada. Kerangka didesain sedemikian rupa sehingga lift bekerja pada jalur semestinya. Pembuatan kerangka pertama dilakukan skema ukuran dengan manual pada sebuah kertas setelah selasai ukuran yang dibuat, bagian utama memotong almunium batangan, sebagai penopang atau pondasi dari sebuah kerangka. Pembuatan kerangka terdiri dari 6 tiang, untuk
penompang bangunan kerangka. Alminium yang digunakan berukuran ½ dengang panjang setiap penopang 1 meter (M), 1 batang terdiri dari pangang 6 meter (M), memerlukan 5 batang berukan 6 meter dan dipotong menjadi 110 Cm. Ukuran kerangka utama dilihat pada gambar 3.2.
Gambar 3.2. Ukuran kerangka utama
Perancangan kerangka pada Lift 3 lantai dapat dilihat gambar 3.3 yang terdapat sebuah kerangka utama sebgai penopang.
Gambar 3.3. kerangka Utama
Lift dirancang merupakan berbentuk miniatur yang bekerja sesuai lift sebenarnya yaitu terdapat tombol sesuai dengan permintaan yang ada seperti, hall call, car call, imergency, indicator, dan terdapat tombol pintu close dan open pintu.
3.8.2 Pemasangan Jalur pada kerangka utama Lift
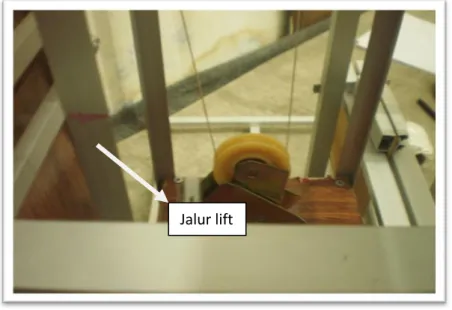
Pada pembuatan jalur memiliki ukran dan penyangga disetiap sudut lift terdiri 4 jalur supaya lift berjalan seimbang dan teratur, pembuatan jalur lift menepelkan bagian almunium siku ukuran ½ , dipasangkan pada kerangka utama dengan baut tinggi jalur yang dibuat 1 meter sama tinggi dengan kerangka utama.
Ukuran jalur lift panjang 22 cm, tinggi 15 cm, lebar 15 cm. sama bersarnya dengan cabbin / ruang penumpang lift. Jalur pada cabbin lift dapat dilihat pada gambar 3.4.
Gambar 3.4. Jalur lift
3.8.3 Pembuatan Cabbin Lift
Setelah jalur dipasangkan pada kerangka utama, pembuatan cabbin lift dengan ukuran panjang 22 cm, tinggi 15 cm dan lebar 15 cm. Pada pembuatan cabbin ini terlebih dahulu didesain secara manual, serta dilanjutkan dengan pembutam kerangka cabbin lift dapat dilihat pada gambar 3.5.
Gambar 3.5. Design cabbin lift
Setelah pembuatan design maka dieksekusi pada bahan yang telah ada, dengan ukuran yang dibuat. cabbin lift 3 Lantai dapat dilihat pada gambar 3.6.
3.8.4 Pembuatan Panel Kendali Lift 3 lantai
Panel kontrol merupakan panel yang mengontrol dan menghubungkan antara sistem kerja lift 3 lantai dengan program PLC. Panel ini nantinya menghubungkan output dan input PLC ke motor – motor lift.
Pada panel ini terdapat motor pintu, motor up dan down, indikator tujuan, indikator keberadaan, limit switch, buzzer, switch hall call switch car call, dan emmergency. Panel terbuat dari akrilik, dilanjutkan proses pemotongan sesuai dengan banyak input dan output yang digunakan. Setelah itu dilanjutkan dengan pembuatan lubang pin konektor. Pada panel lift 3 lantai terdapat 41 panel yang menghubungkan lift ke conector PLC, terdiri dari input 13 dan output 8. Panel controll liftdapat dilihat pada gambar 3.7.
Gambar 3.7. Panel kendali lift 3 lantai
3.9. Pemasangan Komponen
Pemasang komponen merupakan bagian utama dari sistem kinerja lift yang terdiri dari: Tombol hall call, car call, emmergency, open close pintu, indicator, limit switch, buzzer, motor utama dan motor pintu. Dapat dilihat blok diagram lift 3 lantai pada gambar 3.8.
Gambar 3.8. Blok diagram lift 3 lantai
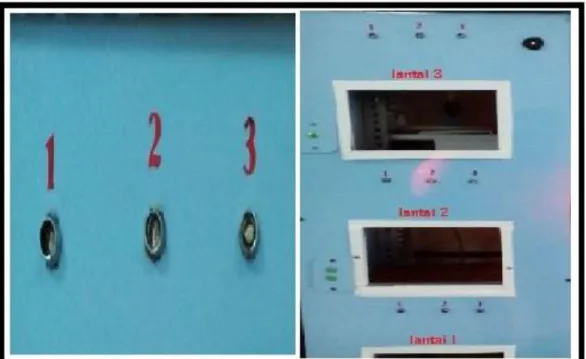
3.9.1 Pemasangan Indicator Keberadaan Cabbin Lift
Indicator merupakan petunjuk keberadaan posisi lift. Indicator keberadaan dipasang disetiap lantai yaitu dibagian luar lift, indicator keberadaan tersebut dipasang disetiap lantai 1,2,dan 3. Indicator keberadaan cabbin dapat dilihat pada Gambar 3.9.
Gambar 3.9. Indicator keberadaan cabbin lift
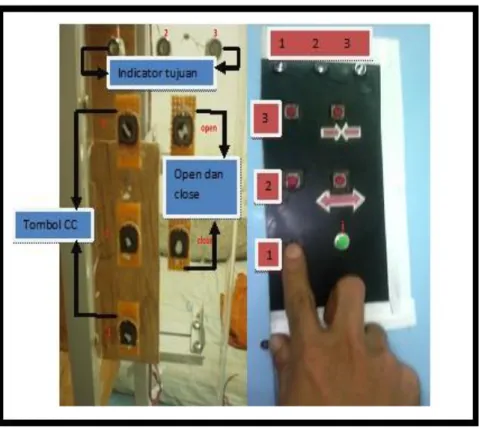
3.9.2 Pemasangan Indicator Tujuan, Tombol Car Call, dan Open Close pintu Lift
Pemasangan komponen indicator tujuan, tombol CC, dan open close pintu yaitu bagian dari komponen dalam lift. Indicator tutjuan terdapat 3 LED yang aktif memberikan informasi kepada penumpang lift terdiri dari lantai 1, 2, dan 3. Tombol car call terdiri dari tombol 1, 2 dan 3 merupakan tombol permintaan lantai tujan yang diinginkan oleh penumpang lift. Tombol open, close pintu, dipasang untuk membuka dan menutup pintu secara manual.
Setiap komponen yang dipasang merupakan perangkat di dalam lift, namun komponen tersebut pemasangannya ditempatkan disisi luar lift, karena cabbin lift berukuran kecil. Alasan untuk pemasangan komponen diluar cabbin lift yaitu menudahkan pengguna dan permintaan yang diinginkan serta lift hanya berbentuk miniatur. Komponen yang terpasang baik indicator lift, tombol car call dan open, close pintu pada gambar 3.10.
a.proses pemasangan 1 b.proses pemsangan 2
Gambar 3.10. Indicator tujuan, tombol car call dan Open, Close pintu.
3.9.3 Pemasangan Tombol Hall Call
Tombol HC memiliki 4 tombol panggilan yaitu: 1 naik, 2 naik, 2 turun dan 3 turun. Tombol HC dipasang pada lift berfungsi sebagai pemanggilan cabbin lift baik turun maupun naik, tombol yang digunakan berupa saklar nomarlly open (NO). Tombol HC dapat dilihat pada gambar 3.10.
a. HC 1 Naik b. HC 2 Naik dan Turun c. HC 3 Turun Gambar 3.11. Tombol HC 1, HC 2, Dan HC 3
3.9.4 Pemasangan Motor Up and Down dan Motor Pintu
Motor penggerak naik dan turun cabbin lift ditempatkan pada posisi atas kerangka utama lift. Motor yang digunakan yaitu motor Dc 24V. Motor diberi penggulung serta tali yang disambungkan pada cabbin lift. Motor open dan close pintu menggunakan motor Dc 12V. Motor ditepatkan pada sisi dalam cabbin lift. Motor utama dan motor open, close pintu dapat dilihat pada gambar 3.11.
a. Motor up and down b. Motor open and close
3.9.5 Pemasangan Limit Switch Lantai 1, 2, dan 3
Pemasang limit Switch disetiap lantai lift, limit switch berfungsi sebagai sensor cabbin lift yang nanti untuk mematikan motor naik dan turun. Limit switch ditempatkan disetiap lantai 1, 2, dan 3. Pemasangan limit switch dapat dilihat pada gambar 3.13.
Gambar 3.13. Limit switch
3.9.6 Pemasangan Buzzer
Buzzer sebagai penanda apabila lift sampai pada tujuan yang diminta oleh penumpang. Buzzer dipasang disisi bagian luar lift. Buzzer akan berbunyi ketika menyentuh limit switch disetiap lantai. Pemasangan buzzer dapat dilihat pada Gambar 3.14.
3.9.7 Input dan Output Pada Lift
Perancangan lift 3 (tiga) lantai ini, mempunyai input dan output yang nantinya untuk menjalankan lift. Terdiri dari 10 saklar dan 5 limit Switch untuk input, sedangkan untuk output 2 motor, 1 buzzer dan 12 led. Input dan Output dapat dilihat pada gambar 3.15.
Gambar 3.15. Input dan output
Keterangan input dan output pada PLC dapat dilihat pada tabel 3.1 dan tabel 3.2.
Tabel 3.1. Keterangan input
NO INPUT KETERANGAN
1 ST1 Saklar tujuan NO 1
2 ST2 Saklar tujuan NO 2
3 ST3 Saklar tujuan NO 3
4 SN1 Saklar naik lantai 1
5 SN2 Saklar naik lanati 2
6 ST2 Saklar turun lantai 2
7 ST3 Saklar turun lantai 3
8 Ls1 Limit switch 1
9 Ls2 Limit switch 2
10 Ls3 Limit switch 3
11 Ls4 Limit switch 4 pintu open
12 Ls5 Limit switch 5 pintu close
13 SI Saklar emmergency
Tabel 3.2. Keterangan output
NO OUTPUT KETERANGAN
1 MN1 Motor penggerak naik
2 MT2 Motor penggerak turun
3 MP Motor pintu box
4 BUZZER Penanda bilik sampai tujuan
5 LED 1,2 DAN 3 Indikator 1, 2 dan 3 di dalam bilik
6 LED 1,2 DAN 3 Indikator 1, 2, dan 3 lantai 1
7 LED 1,2 DAN 3 Indikator 1, 2, dan 3 lantai 2
8 LED 1,2 DAN 3 Indikator 1, 2, dan 3 lantai 3
3.9.8 Pemasangan Kabel Pada Panel PLC
Pemasangan kabel pada komponen untuk conection panel input, output dan PLC, supaya setiap komponen aktif, terdiri dari switch, limit switch, Led,
buzzer dan Motor. Switch dipasang pada setiap lantai untuk memanggil cabbinlift, tujuan terhadap yang diingginkan oleh penumpang, serta switch open dan close untuk membuka serta close pintu pemasangan kabel terdiri dari baberapa pemasang sebagai berikut :
1. Pemasangan kabel pada indicator.
Indicator lantai dan indicator tujuan, indicator lantai menunjukan keberadaan cabbin lift dan indicator tujuan menandakan penumpang menginginkan tujuan tersebut. Indicator tujuan terdapat 3 Led, dan indicator keberdaan lift terdapat 9 Led. Indicator merupakan petunjuk suatu sistem telah berjalan. Indicator terdiri dari beberapa yaitu.
2. Indicator penanda keberadaan lift.
Indicator penanda keberadaan lift berfungsi pada saat lift telah sampai di lantai tujuan baik 1, 2, dan 3.
3. Indicator tujuan.
Indicator tujuan sebagai penanda lift disaat penumpang menginkan suatu tujan pada setiap lantai.
4. Pemasangan kabel Limit switch.
Limit switch dipasang sebagai mematikan motor pintu, motor utama serta untuk mengatifkan Led dan buzzer. Setiap lantai terdapat limit switch dan pintu. Pada lantai 1, 2, 3 terdapat 1 limit switch dan 2 limit switch dibagian pintu cabbin lift.
5. Pemasang kabel pada switch Hal call dan Car call.
Pada setiap lantai terdapat tombol HC untuk pemanggilan cabbin lift, pada lantai 1, 2, dan 3. Sedangkan CC terdapat di dalam cabbin lift, tetapi penempatan pada tombol CC lift yang dibuat ditempatkan di luar lift. CC berguna untuk tujuan yang diinginkan oleh penumpang. Car Call 1, 2, dan 3.
6. Pemasangan kabel emmergency.
Emmergency merupakan suatu yang berguna pada lift untuk disaat terjadi kegagalan atau lift dalam keadaan mati disaat jalan, maka tombol ini mematikan secara paksa motor dan panggilan darurat untuk pertolongan pada pemumpang. Tombol emmergency disambungkan ke panel kendali input dan output PLC.
7. Pemasangan kabel Buzzer.
Buzzer berguna sebagai penanda darurat dan penanda sebai telah sampai tujuan. Kabel untuk Buzzer terhubung pada panel kendali input dan output PLC.
8. Pemasangan kabel motor up dan down.
Motor up dan down menggunakan motor Dc mesin photo copy, intput 24V yang mana nanti untuk proses menarik cabbin lift saat up dan down. Naik dan turun lift diberikan suatu tali yang terikat pada cabbin dan disisi atas lift terdapat katrol. Motor lift disambungkan dengan kabel untuk memberikan arus 24V, supaya motor bekerja untuk naik dan turun lift.
9. Pemasangan kabel pada motor pintu
Motor pintu menggunakan motor Dc, motor mesin printer sebagai membuka dan menutup pintu lift. Motor diberikan arus 12V supaya motor bergerak mebuka dan menutup pintu. Komponen pada lift 3 lantai dapat dilihat pada tabel 3.3.
Tabel. 3.3. Komponen pada lift 3 lantai
No Nama Komponen Keterangan input / output
1 Led Luar (setiap Lantai 1,2,3) output
2 Led Tujuan ( 1,2 dan 3) output
3 Limit Switch lantai 1, 2, 3 input
4 Buzzer output
5 Saklar emmergency input
6 Saklar pemanggilan Luar 1,2,3 input
7 Saklar tujuan input
8 saklar close pintu input
9 Saklar open input
10 Motor naik dan turun output
11 Motor pintu output
Semua kabel terhubung pada panel PLC baik HC, CC, emmergency, limit switch, motor dan indicator. Kabel yang terhubung pada panel input dan output untuk memberikan conection pada PLC. Pemasangan kabel pada panel input dan output dapat dilihat pada gambar 3.16.
a.pemasangan kabel input b.pemasangan kabel output Gambar. 3.16. Pemasangan kabel komponen pada panel PLC.
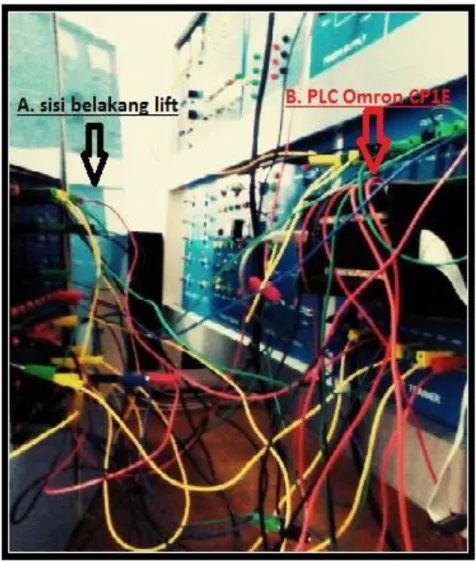
3.9.9 Menghubungkan Panel Kendali Lift dengan PLC
Panel kontrol sebagai input dan output yang menghubungkan konektor PLC dan lift. Panel kontrol terdapat di belakang badan kerangka lift. Papan panel ini terdapat 40 pin yang akan menyambungkan kabel – kabel conector terhadap PLC. Panel kendali lift Dapat dilihat pada gambar 3.17.
A. Pemasangan komponen input
ke trainer
B. Pemasangan komponen
Gambar 3.17. Panel kendali lift
Keterangan simbol – simbol pada panel kendali terhadap input dan output lift 3 lantai dapat dilihat pada tabel 3.4.
Tabel 3.4 Simbol – simbol panel kendali
NO SYMBOL KETERANGAN 1 ST 1 Saklar Tujuan 1 2 ST 2 Saklar Tujuan 2 3 ST 3 Saklar Tujuan 3 4 PO Pintu Open 5 PC Pintu Close 6 LS3 Limit Switch 3 7 LS2 Limit Switch 2 8 LS1 Limit Switch 1 9 COM PLC Input 10 COM PLC Input 11 TT3 Tombol Turun 3 12 TT2 Tombol Turun 2 13 TN2 Tombol Naik 2 14 TN1 Tombol Naik 1
16 LSC Limit Switch close
17 LL 1, 2 dan 3 Lampu Luar 1,2 dan 3
18 B Buzzer 19 COM PLC Output 20 + - 12 v dan 24 v 21 MU Motor Up 22 MD Motor Down 23 MO Motor Open 24 MC Motor Close
25 LD 1,2 dan 3 Lampu Dalam 1,2 dan 3
Setelah semua kabel tersambung sesuai alamatnya, maka langkah pengujian selanjutnya adalah dengan menjalankan program kendali. Pemasangan kabel conector pada panel ke PLC menghubungkan, input dan output terhadap komponen aktif pada lift 3 lantai. Pemasangang kabel konektor lift ke PLC pada gambar 3.18.
Penyambungan kabel konektor dari lift ke PLC Omron SYSMAC CP1E, menyambungkan input dan ouput lift yang akan dikendalikan oleh program PLC. Penyambungan kabel konekntor panel kendali lift ke PLC Omron dapat dilihat pada gambar 2.19.
Gambar 2.19 Conector panel kendali lift ke PLC Omron
3.10 Hasil Perancangan Lift
Pada pembuatan yang telah dilakukan baik mekanik dan elektriknya yang telah dirancang sedemikian rupa, jadi suatu bentuk barang yang dapat berfungsi, yaitu lift 3 lantai up dan down, hasil dari alat yang telah dirakit dikombinasikan dengan program PLC. Bentuk lift 3 lantai yang telah dibuat dapat dilihat pada gambar 3.20.
Gambar 3.20. Bentuk lift 3 lantai
Bentuk lift 3 lantai digerakan dengan motor Dc 24V baik naik dan turun lift, open dan close pada pintu digerakan dengan motor Dc 12V, pada tombol yang ada menggunakan switch No, indicator menggunakan Led, penanda buzzer. Sistem gerak dibantu oleh tali dan kantrol yang diikat pada motor dan cabbin lift. Katrol dipasang dibagian atas cabbin lift.
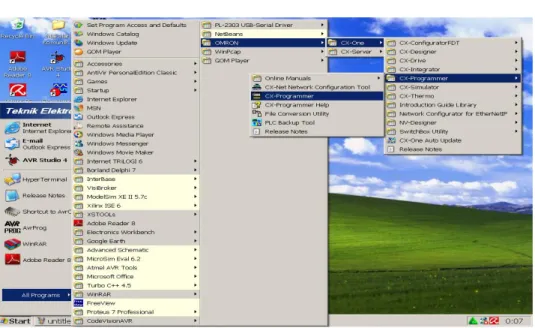
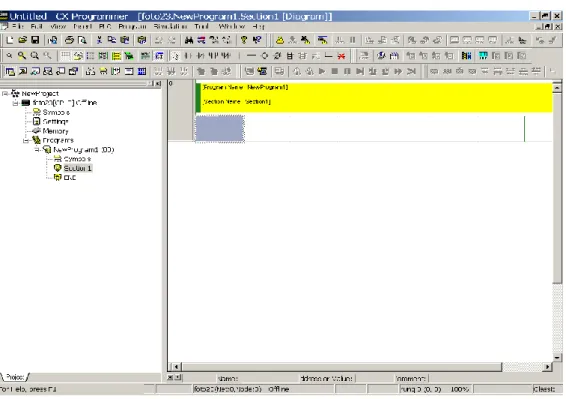
3.11 Pembuatan Software
Pembuatan hardware selesai dibuat, selanjutnya pembuatan software yaitu melakukan pembuatan program untuk lift 3 lantai menggunakan CX-Programmer. Pembuatan program lift yang dikendalikan oleh PLC. Dapat dilihat diagram alir pembuatan program PLC pada gambar 3.21.
Gambar 3.21. Diagram alir pembuatan program PLC
Pembuatan software dilakukan berguna untuk mengatur sistem naik dan turun lift. Pembuatan software yaitu perancang program kendali yang terdiri dari input dan output lift 3 lantai.
3.12 Langkah - langkah Program Kontrol PLC
Dalam proses pembuatan miniatur lift 3 lantai yang dikontrol oleh PLC ini, langkah terakhir yang harus diselesaikan adalah pembuatan program kendali lift 3 lantai. Program yang akan dibuat menggunakan software CX Programmer, software inilah yang akan mengalamatkan perintah pada program PLC. Setiap pembuatan program yang diingikan terlebih dahulu memastikan software dalam terinstal pada komputer atau laptop, menyambugkan kabel data pada komputer dan PLC. PLC dan komputer dalam keadaan On supaya program yang dibuat dapat dijlankan. Langkah – langkah pembuatan program kontrol miniatur lift 3 lantai adalah sebagai berikut :