Analisis dan Implementasi Krill Herd Algorithm (KHA) dalam Masalah
Pemotongan Bahan (Cutting Stock Problem) Non-guillotine Dua Dimensi
Jeffrey1, Agung Toto Wibowo2, Mahmud Dwi Sulistiyo3 1, 2, 3Fakultas Informatika Institut Teknologi Telkom Jalan Telekomunikasi 1, Dayeuh Kolot Bandung 40257 Indonesia
1
[email protected] , 2[email protected] , 3[email protected] Abstrak
Cutting Stock Problem(CSP) merupakan masalah kombinatorial yang tergolong sulit untuk di pecahkan. Dalam satu kasus terdapat beberapa solusi yang mungkin dengan nilai fitness yang sama. Tujuannya adalah untuk mengoptimalkan pemakaian stock dalam memenuhi semua permintaan order.
Krill Herd Algorithm (KHA) adalah algoritma metaheuristik yang tergolong dalam Swarm Intellegent yang dibuat untuk menyelesaikan permasalahan optimasi kombinatorial yang sulit dan diharapkan dapat menghasilkan solusi yang optimal. Pada KHA terdapat 3 (tiga) gerakan utama krill (motion calculation) dalam pencarian solusi, yaitu motion induced, foraging motion, dan physical diffusion.
Dalam penelitian ini KHA diimplementasikan dalam memecahkan masalah CSP. Dengan menerapkan beberapa parameter dalam pencarian, KHA mampu menyelesaikan masalah CSP, namun bukan merupakan solusi optimal.
Kata kunci:
Cutting Stock Problem, Krill Herd ALgorithm, order, stock
Abstract
Cutting Stock Problem (CSP) is a hard-combinatorial problem. In one case there are some solutions with the same fitness value. The goal is to optimize the use of stock to complete all the request order.
Krill Herd Algorithm (KHA) is metaheuristics algorithms belonging to the Swarm Intellegent made to resolve difficult combinatorial optimization problems and is expected to produce an optimal solution. In KHA there are 3 (three) major motion krill (motion calculation) in the search for solutions, the induced motion, foraging motion, and physical diffusion.
In this research KHA is implemented in solving the CSP. With the setting of some parameter in process, KHA can found the solution of CSP, even not the optimum solution.
Keywords:
Cutting Stock Problem, Krill Herd Algorithm, order, stock
1. Pendahuluan
Cutting Stock Problem (CSP) merupakan
permasalahan optimasi yang sering ditemukan pada industri manufaktur. Hingga saat ini pun permasalahan CSP masih sering terjadi pada industri yang memiliki bahan baku seperti kertas, baja, kayu, plastik, tekstil dan sebagainya[13]. Industri yang memiliki bahan baku seperti ini biasanya harus bisa menemukan pola pemotongan bahan baku dengan sisa bahan (trim loss) yang paling sedikit agar perusahaan dapat mengurangi biaya produksi dan menjadi lebih efisien dalam penggunaan bahan bakunya untuk menghindari kerugian. Cutting Stock
Problem (CSP) tergolong masalah otimasi
kombinatorial yang sulit untuk di pecahkan dan membutuhkan waktu yang lama dalam pencariannya. Ada 2 (dua) jenis varian dari CSP, yaitu satu dimensi dan dua dimensi. Kasus CSP pada satu dimensi ditemukan pada pemotongan bahan yang memiliki satu atribut parameter seperti pada
batangan kayu, besi, gulungan kertas. Pada kasus CSP dua dimensi, kasus CSP ditemukan pada material bahan baku yang berbentuk bidang dua dimensi seperti lembaran kertas, kain, lempengan metal, dan lainnya. Pada tugas akhir ini difokuskan pada non-guillotine dua dimensi karena merupakan varian CSP yang sering dijumpai.
CSP Sampai saat ini, pada CSP belum ditemukan suatu metode yang pasti dan dapat menjamin keberhasilan nilai optimalnya. Oleh karena itu, dibutuhkan suatu metode untuk menyelesaikan dengan menemukan pola pemotongan yang paling optimal. Sebelumnya banyak penelitian yang dilakukan untuk menyelesaikan CSP dengan menggunakan metode-metode pendekatan seperti Cuccko Search, Water
Drop, Artificial Bee Colony dan Ant Colony
Optimization[10]. Berdasarkan solusi yang
dihasilkan metode-metode tersebut didapatkan hasil yang yang baik tetapi belum optimal. Tugas akhir ini
menggunakan algoritma optimasi yang ditemukan pertengahan tahun 2012 yaitu Krill Herd Algorithm (KHA). Krill Herd Algorithm (KHA) adalah
algoritma metaheuristik yang tergolong dalam
Swarm Intelligence (kolonial). Kelebihan KHA dari
metode optimasi lainnya yaitu terletak pada proses utama pada sekumpulan krill yang dibangkitkan untuk melakukan pencarian posisi dengan menggunakan 3 (tiga) gerakan, motion induced,
foraging motion, dan physical diffusion. Gerakan motion induced dan foraging digunakan untuk
mendapatkan hasil solusi yang optimal (global dan lokal) menuju fitness terbaik dari setiap iterasi, karena pada motion induced terjadi proses dimana
krill yang memilik fitness paling baik memiliki
pengaruh yang besar untuk menarik krill-krill lain untuk mengikutinya, pada foraging motion posisi makanan memicu pergerakan menuju otimum global, sedangkan random diffusion digunakan untuk memperbesar pencarian pada ruang solusi karena selalu menghasilkan posisi yang random pada tiap iterasi [8]. Untuk melengkapi algoritma KHA dilakukan juga strategi untuk mendapatkan solusi yang optimal menggunakan algoritma genetika yaitu crossover. Berbeda dengan crossover yang sudah ada sebelumnya pada KHA crossover disini dikontrol oleh crossover probability. Fungsi
crossover pada KHA yaitu untuk meningkatkan fitness kearah yang lebih otimal (menjauhi solusi
buruk). Oleh karena itu pada tugas akhir ini akan diimplementasikan KHA dengna crossover untuk menyelesaikan CSP non-guillotine dua dimensi. 2. Dasar Teori
2.1 Cutting Stock Problem (CSP)
Cutting Stock Problem (CSP) adalah
permasalahan optimasi kombinatorial atau lebih spesifiknya disebut permasalahan integer linear
programming[12]. Cutting stock problem (CSP)
digolongkan sebagai kategori NP-Hard Problem yang arti bahwa usaha komputasi yang digunakan sulit dan waktu yang dibutuhkannya lama sehingga diperlukan suatu metode baru agar waktu komputasi lebih cepat dalam menemukan solusi yang optimal. Solusi optimal artinya adalah solusi yang terbaik yang dihasilkan dalam jangka waktu tertentu. Dalam tugas akhir ini akan difokuskan pemotongan bahan dua dimensi non-guillotine seperti pemotongan pada bahan baku plat kayu dan kertas. Masalah CSP yang akan dibahas dapat direpresentasikan secara sederhana seperti
(berbentuk persegi panjang) i yang memiliki panjang li dan lebar wi dengan sebuah stock S dengan bentuk segi empat pula, dengan panjang L dan lebar W[3]. Dalam penyelesaian CSP difokuskan bagaimana mendapatkan pola pemotongan yang optimal untuk memenuhi
order-order yang dipesan dengan pemakaian stock seminimal mungkin.
Masalah pemotongan bahan, memotong objek besar (stock material) menjadi objek kecil (order list), dapat diklarifikasikan menjadi empat kategori[13]:
CSP berdasarkan dimensionalitas: a. Satu dimensi
b. Dua dimensi c. Tiga dimensi
2. CSP berdasarkan penugasannya:
a. Menggunakan semua objek besar dan beberapa objek kecil (B)
b. Menggunakan beberapa objek besar dan semua objek kecil (V).
3. CSP berdasarkan jenis objek yang besar a. Hanya satu objek besar (O),
b. Banyak objek besar yang sama (I), c. Hanya objek besar yang berbeda (D).
4. CSP berdasarkan jenis objek yang kecil a. Sedikit objek kecil dengan ukuran yang
berbeda (F),
b. Banyak objek kecil dengan banyak ukuran (M),
c. Banyak objek kecil dengan relative sedikit ukuran (R),
d. Banyak objek kecil yang sama (C).
Untuk masalah CSP untuk bentuk regular
rectangular, ada dua pola pemotongan, yaitu:
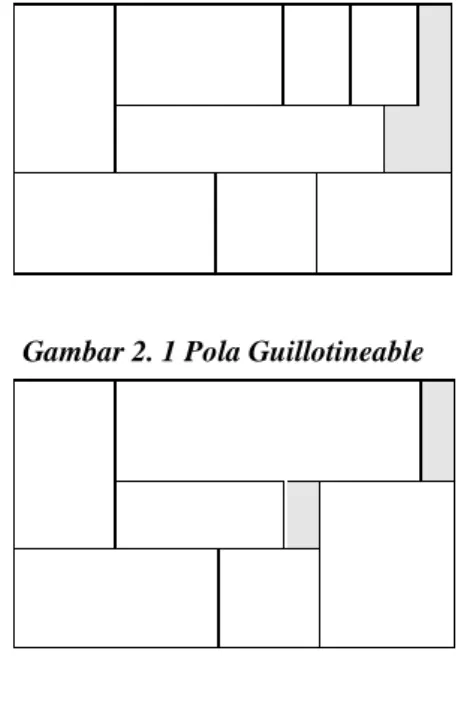
1. Guillotine Pattern
Guillotine Pattern merupakan pola pemotongan
yang dimulai dari satu sisi segi empat yang kemudian dilanjutkan pada sisi lainnya. Pemotongan pertama dengan tipe Guillotine
Pattern adalah dengan memotong bahan baku
dengan panjang atau lebar yang sama. Pemotongan tersebut menghasilkan dua atau lebih pieces yang mempunyai panjang atau lebar yang sama, bukan kedua-duanya[4]. 2. Non- Guillotine
Disebut Non-Guillotine karena tidak memungkinan diperolehnya pola pemotongan, yang dapat “memotong” stock dari satu sisi ke sisi yang lain. Dalam tugas akhir ini, pola pemotongan di fokuskan pada Non-guillotine. Hal ini dipilih karena pada umumnya CSP berfokus pada meminumumkan sisa pemotongan yang stock, yang berarti pengoptimalan pemakaian stock. Sedangkan masalah guillotine maupun non-guillotine
adalah masalah kemudahan cara pemotongannya. Selain itu pada perakteknya didunia nyata pemotongan guillotine sangat jarang dijumpai, seperti pada industri garmen,
spare-part, dan lainnya[8].
Dibawah ini adalah gambar 2-1, terlihat perbedaan pola pemotongan Guillotine pattern dan Non-guillotine pattern:
Gambar 2. 1 Pola Guillotineable
Gambar 2. 2 Pola Non-Guill
2.2 Krill Herd Algorithm (KHA)
Krill Herd Algorithm (KHA) adalah sebuah
algoritma optimasi meta-heuristik yang tergolong Swarm Intelligence. KHA bertujuan untuk menyelesaikan masalah optimasi yang kompleks[6]. Algoritma ini perkenalkan oleh Amir Hossein Gandomi dan Amir Hossein Alavi pada pertengahan tahun 2012. Ide dasar dari algoritma ini adalah terinspirasi dari perilaku sekumpulan/sekawanan udang artik (krill) yang sedang bergerak untuk mencari keberadaan makanan disekitarnya kemudian diserang oleh pemangsa, kemudian pemangsa mengurangi kepadatan dari kawanan krill tersebut. Tujuan dari setiap individu krill adalah menambah kepadatan dari kumpulan
krill dan berhasil mendapatkan makanan[6].
Proses untuk mencapai tujuan tersebut dipengaruhi oleh tiga gerakan utama dari
krill, yaitu:
1. Motion Induced (gerakan yang diinduksi atau dipengaruhi oleh kehadiran individu krill lain disekitarnya),
2. Foraging activity (gerakan krill mencari makan),
3. Physical diffusion (gerakan acak
krill).
Ketiga gerakan diatas dapat disimbolkan dengan rumus:
𝑑𝑋𝑖 𝑑𝑡
= 𝑁
𝑖+ 𝐹
𝑖+
𝐷
𝑖(2 −
1)
Dimana, Ni = Motion induced Fi = Foraging motion Di = Physical diffusion Salah satu bagian menarik dari algoritma ini adalah bahwa KHA ini mensimulasikan perilakukrill menggunakan riset studi dunia nyata untuk
mendapatkan koefisien. Karena fakta-fakta yang didasarkan dari hasil riset bukan hanya terinspirasi dari alam, hal ini menjadi keuntungan tersendiri dibandingkan algoritma-algoritma lainnya. Tahapan validasi menunjukkan bahwa metode KHA memiliki hasil yang sangat baik untuk diaplikasikan pada pengoptimasian.
2.3 Motion Induced
Motion Induced merupakan gerakan pertama dari
ketiga gerakan yang mempengaruhi pencarian solusi dari KHA .Gerakan ini dipengaruhi oleh gerakan tetangga-tetangga disekitar krill. Individu krill mencoba untuk mempertahankan serta meningkatkan kepadatan kawanannya. Gerakan ini dipengaruhi sifat attractive dan repulsive (α) dari setiap individu krill. Sifat tersebut dipengaruhi oleh kepadatan (untuk mencari tetangga mana saja yang berpengaruh) serta jarak krill tetangga yang paling dekat dengan makanan (dilihat dari fitness yang dihasilkan). Gerakan ini memiliki rumus:
𝑁
𝑖𝑛𝑒𝑤=
𝑁
𝑚𝑎𝑥𝛼
𝑖+
𝜔
𝑛𝑁
𝑖𝑜𝑙𝑑(2 −
2)
dimana,
𝛼
𝑖= 𝛼
𝑖𝑙𝑜𝑐𝑎𝑙+ 𝛼
𝑖𝑡𝑎𝑟𝑔𝑒𝑡(2
− 3)
dimana,
𝛼
𝑖𝑙𝑜𝑐𝑎𝑙= 𝐾
𝑖𝑗𝑋
𝑖𝑗𝑁𝑁 𝑗 =1
(2
− 4)
𝑋
𝑖𝑗=
𝑋𝑗 −𝑋𝑖 𝑋𝑗 −𝑋𝑖 + 𝜀(2 −
5)
𝐾
𝑖𝑗=
𝐾
𝑖−𝐾
𝑗𝐾
𝑤𝑜𝑟𝑠𝑡− 𝐾
𝑏𝑒𝑠𝑡(2
− 6)
dan𝛼
𝑖𝑡𝑎𝑟𝑔𝑒𝑡=
𝐶
𝑏𝑒𝑠𝑡𝐾
𝑖,𝑏𝑒𝑠𝑡𝑋
𝑖,𝑏𝑒𝑠𝑡(2 −
7)
𝐶
𝑏𝑒𝑠𝑡= 2 𝑟𝑎𝑛𝑑 0,1
+
𝐼
𝐼
𝑚𝑎𝑥(2
− 8)
Pada iterasi pertama
𝑁
𝑖𝑜𝑙𝑑 di set nol, dikarenakan pencarian pertama baru akan dimulai belum memiliki nilai. Pengaruh paling besar adalah𝛼
𝑖, dimana𝛼
𝑖 merupakan kombinasi dari efek tetangga yang disekitar krill yang memiliki efekattractive/repulsive (efek tersebut dipengaruhi dari fitness yang dimiliki setiap individu krill) dan efek
dari krill yang memiliki fitness terbaik.
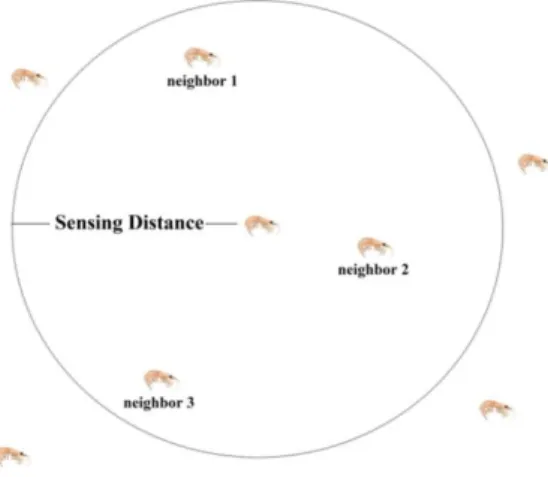
Untuk bagian pencarian tetangga (sensing neighbor) digunakan rumus:
𝑑
𝑠,𝑖=
1
5𝑁
𝑋
𝑗 −𝑋
𝑖 𝑁 𝑗 =1(2
− 9)
Dibawah ini adalah gambar 2-2 bagaimana pengaruh
Gambar II-2: Sensing neighbor
Sensing neighbor digunakan untuk mencari tetangga
untuk setiap krill ke-i, kemudian setelah di dapatkan tetangganya maka akan diketahui
𝑋
𝑖,𝑋
𝑗,𝐾
𝑖, dan𝐾
𝑗-nya. Keterangan:𝑁
𝑖𝑛𝑒𝑤 = kecepatan induksi maksimum[0.01]ω
𝑛 = berat inersia gerakinducedrange[0,1]𝑁
𝑖𝑜𝑙𝑑 = gerakan induksi sebelumnya (iterasi awal di set nol)𝛼
𝑖𝑙𝑜𝑐𝑎𝑙 = efek lokal dari tetangga𝛼
𝑖𝑡𝑎𝑟𝑔𝑒𝑡= efek arah dari krillyang terbaiksaati itu
𝑋
𝑖 = posisi krillke-i𝑋
𝑗 = posisi tetangga krillke-j𝐾
𝑖 = fitnesskrill ke-i𝐾
𝑗 = fitness tetangga krill ke-j= bilangan positif terkecil
I = iterasi
Imax = iterasi maksimal
= fitness terbaik dari semua krill saat
itu
= fitness terburuk dari semua krill
saat itu.
2.4 Foraging Motion
Foraging motion atau gerakan mencari makan
merupakan gerakan dipengaruhi oleh dua parameter utama, yang pertama adalah lokasi dari makanan itu sendiri dan yang kedua adalah pengalaman
sebelumnya tentang lokasi makanan. Gerakan pencarian makanan setiap individu krill dapat di rumuskan dengan rumus:
,
Hampir sama dengan motion induced pada iterasi pertama di set nol, karena pada iterasi pertama belum memiliki pengalaman terhadap lokasi makanan. Tetapi setelah dilakukan iterasi pertama, maka nilai pada iterasi kedua akan didapatkan dari nilai pada iterasi pertama dan begitu seterusnya ( ). Pada gerakan ini disimpulkan bahwa bahwa memiliki pengaruh yang besar pada gerakan ini, dapat dilihat bahwa merupakan kombinasi dari sifat attractive dari makanan dan efek dari krill yang memiliki best
fitness pada saat itu. Pada gerakan ini lokasi
makanan juga memiliki efek terhadap krill, yang dirumuskan sebagai berikut:
Sedangkan rumus dari sifat attractive dari makanan dapat dirumuskan sebagai berikut:
Pada foraging motion efek dari individu krill yang memiliki fitness terbaik dapat dirumuskan sebagai berikut:
Keterangan:
= kecepatan pencarian makanan [0.02]
= berat inersia gerak
foragingrange[0,1]
= gerakan foraging sebelumnya (iterasi awal di set nol)
= gerakan attractive makanan = efek krill yang memiliki fitness terbaik
= posisi krill ke-i
= posisi tetangga krillke-j
= fitnesskrill ke-i
= fitness tetangga krill ke-j
= lokasi makanan (posisi)
= fitness dari lokasi makanan
I = iterasi
Imax = iterasi maksimal
2.5 Physical Diffusion
Physical diffusion disebut juga sebagai gerakan krill
yang acak (random process), yang artinya gerakan ini dipengaruhi oleh kecepatan difusi maksimum dan vektor arah yang acak. Gerakan ini diformulasikan dengan rumus:
Keterangan:
= kecepatan difusi maksimum
range[0.002,0.010]
= vektor acak random[-1,1]
I = iterasi
Imax = iterasi maksimal
2.6 Genetic operator (cross over)
P
ada Krill Herd Algorithm dilakukan improvisasi terhadap performansinya, yaitu dengan menambahkan genetic reproduction algorithm yaitucrossover, untuk KHA sendiri pada referensi
paper-nya digunakan juga teknik mutasi. Berdasarkan validasi hasil yang dikeluarkan paper terlihat bahwa kombinasi KHA dengan crossover menghasilkan solusi yang lebih baik dibandingkan KHA dengan mutasi atau KHA dengan mutasi dan crossover. Probabilitas crossover (Cr) merupakan parameter pengontrol algoritma genetik crossover pada KHA.
Pada tabel II-1 dibawah ini adalah bukti kuat berbentuk tabel validasi digunakannya crossover pada KHA, dibandingkan dengan algoritma-algoritma optimasi lainnya.
3. Analisis dan Pengujian Sistem Skenario Pengujian
Dalam tugas akhir ini ada beberapa parameter dan kombinasi proses Krill Herd Algorithm yang akan menjadi fokus analisis, yaitu: jumlah krill (N), jumlah maksimum iterasi (cycles), dan sensing distances (upper bound dan
lower bound). Ketiga parameter tersebut
akan diteliti pengaruhnya terhadap nilai optimasi yang dihasilkan sistem, selain itu akan dikombinasikan juga untuk mendapatkan batasan nilai ideal (bawah, tengah dan atas) agar ditemukan berapa saja nilai dari parameter yang berpengaruh terhadap solusi. Adapun penjelasan tentang ketiga parameter diatas, berikut penjelasannya:
1. Jumlah maksimum iterasi (Cycles)
Cycles merupakan nilai dari
maksimum iterasi yang dinyatakan dari banyaknya pencarian yang dilakukan pada sistem untuk mencari solusi. Pada KHA iterasi mempengaruhi nilai solusi pada iterasi selanjutnya, artinya semakin banyak pencarian maka kemungkinan akan mendapatkan solusi ke-arah yang optimal. 2. Jumlah krill yang dibangkitkan (Jumlah Krill)
Pada KHA, kumpulan krill
direpresentasikan sebagai agen-agen yang akan mencari solusi. Karena pada setiap individu krill akan menghasilkan sebuah solusi, sehingga jumlah krill yang
dibangkitkan akan merepresentasikan banyaknya solusi yang dihasilkan pada setiap iterasi.
3. Batas atas dan bawah pada motion
induced (sensing distance).
Sensing distance pada KHA
berpengaruh pada proses motion
induced pada motion calculation.
Diketahui bahwa sensing akan membawa tetangga-tetangga disekitar krill yang memiliki
fitness tertentu ke arah yang lebih
baik,jadi semakin dekat jarak
sensing maka semakin banyak
keberadaan krill menuju ke arah
fitness yang terbaik.
Setting Parameter
Selama proses pengujian dilakukan observasi terhadap kombinasi parameter berikut :
Cycles : 10, 50, 100
Krill : 10, 50, 100
Sensing Distance : 0.01, 0.3, 0.7
Terdapat 27 kombinasi dari parameter diatas, dengan 50 dan 200 iterasi. Setiap kombinasi diobservasi sebanyak 3 kali.
Selama proses pencarian berlangsung dihitung beberapa nilai pengujian antara lain rata fitnes, fitnes terbaik dan rata-rata iterasi. Deskripsi nilai-nilai tersebut adalah sebagai berikut :
Rata-rata fitnes adala rata-rata dari sekumpulan nilai fitnes.
Fitnes terbaik adalah nilai fitnes terbaik yang pernah dicapai selama proses pencarian
Rata-rata iterasi adalah rata-rata iterasi dimana solusi paling optimal ditemukan.
Dari hasil observasi, didapatkan data empirik sebagai berikut:
Gambar IV-1: Grafik rata-rata nilai optimasi berdasarkan sensing distance
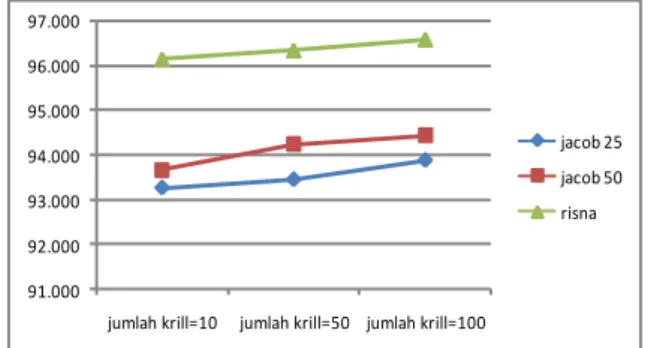
Gambar IV-2: Grafik rata-rata nilai optimasi berdasarkan jumlah krill
Gambar IV-3: Grafik rata-rata nilai optimasi berdasarkan cycles
Gambar IV-4: Grafik perbandingan rata-rata nilai optimasi dengan crossover dan tidak
91.000 92.000 93.000 94.000 95.000 96.000 97.000 98.000
Sensing =0.05 Sensing =0.1 Sensing =0.2
Jacob 25 Jacob 50 Risna 91.000 92.000 93.000 94.000 95.000 96.000 97.000
jumlah krill=10 jumlah krill=50 jumlah krill=100
jacob 25 jacob 50 risna 90.000 91.000 92.000 93.000 94.000 95.000 96.000 97.000 98.000
cycles=10 cycles=50 cycles=100
jacob 25 jacob 50 risna
3. Kesimpulan
Kesimpulan dan Saran 3.1 Kesimpulan
Kesimpulan yang dapat diambil dari hasil implementasi dan uji coba yang dilakukan pada Tugas Akhir ini adalah:
1. KHA dapat diimplementasikan pada CSP dua dimensi non-guillotine dan menyelesaikannya dengan rata-rata nilai optimasi diatas 90%.
2. Pengaturan parameter dengan cycles lebih besar dari 50, jumlah krill lebih besar 50 dan sensing diatas 0.1 merupakan kombinasi terbaik pada sekenario ini berdasarkan rata-rata nilai optimasi. 3. Crossover membuktikan performanya
dalam menghasilkan rata-rata nilai optimasi yang lebih baik dibandingkan hanya dengan
motion calculation saja.
4. Semakin besar nilai parameter sensing,
cycles, dan jumlah krill rata-rata nilai
optimasi semakin besar. 3.2 Saran
Saran-saran untuk pengembangan selanjutnya antara lain :
1. Mencoba memadukan KHA dengan algoritma optimasi lokal search seperti Tabu Search.
2. Mencoba mengimplementasikan order dengan bentuk lain yang lebih beragam. 3. Mencoba menganalisis hasil dari
proses-proses pada motion calculation.
4. Mencoba memodifikasi rumus crossover agar hasil optimasinya lebih baik.
Daftar Pustaka:
[1] Ahmed Mellouli, Abdel Aziz Danmak, “An
Algorithm for the Two-Dimensional Cutting-Stock Problem Based on a Pattern Generation Procedure”, Univeristy of Sfax, Tunisia.
[2] Alev Soke, Zafer Bingul. (2004). Applications
of Discrete PSO Algorithm to
Two-Dimensional Non-Guillotine Rectangular
Packing Problems. Kocaeli University,
Kocaeli, Turkey.
[3] Alvarez, Valdes R, Parren˜o, F, and M. Tamarit, 2006, “A tabu search algorithm for a two-dimensional non-guillotine cutting problem”, Valencia, Spain.
[4] Denny Nurkertamanda, Singgih Saptadi, Adhika Permanasari, Optimasi Cutting Stock
Pada Industri Pemotongan Kertas Dengan
Menggunakan Metode Integer Linear
Programming, Teknik Industri Universitas
Dipenogoro, Indonesia.
[5] Fitrian, Wahyu. 2011Pencarian Solusi Optimal
Cutting Stock Problem dengan Menggunakan Firefly Algorithm. Fakultas Informatika IT
Telkom, Bandung, Indonesia. .
[6] Gandomi AH., Alavi AH. “Krill herd: A new
bio-inspired optimization algorithm”,
Commun Nonlinear Sci Numer Simulat 17
(2012), 4831-4845.
[7] Hopper, Eva. (2000). Two-dimensional Packing utilising Evolutionary Algorithms and other Meta-Heuristic Methods. University
of Wales.
[8] Juliansyah, Budi. 2012. Analisis dan Implementasi Ant Colony Optimization (ACO) dalam Masalah Pemotongan Bahan (Cutting Stock Problem) Non-guillotine Dua Dimensi.
Fakultas Informatika Institut Teknologi Telkom. Bandung.
[9] Prawitamurti, Risna. 2010. Pencarian Solusi
Optimal Pemotongan Bahan (Cutting
Material) dengan Menggunakan Adaptive Genetic Algorithm. Fakultas Informatika IT
Telkom, Bandung, Indonesia.
[10] Robert W. Haessler, Paul E Sweeney, “Cutting stock problems and solution
procedures”, School of Businnes
Administration, The Univeristy of Michigan,USA.
[11] Suyanto, 2008, “Evolutionary Computation:
Komputasi Berbasis “Evolusi” dan