BAB 3
METODOLOGI PENELITIAN
3.1. Penentuan Masalah Penelitian
Penelitian ini dilakukan berdasarkan penelitian yang lalu pada kasus yang berbeda. Pada kasus Lien (2007) dan Sahagun (2007) yang dihadapi adalah pemantauan pejalan kaki dengan kondisi yang padat. Melihat kondisi lalu lintas yang sangat padat, peneliti melihat adanya kesamaan kasus yang dihadapi, kemudian metode pada percobaan sebelumnya diujikan untuk kasus pemantauan kendaraan.
Pemantauan dengan menggunakan video digital, seperti yang dijelaskan oleh Lien (2007), secara umum terdapat dua jenis teknik yang dipergunakan untuk melakukan aktifitas pemantauan yaitu pendekatan menggunakan model dari objek dan pendekatan menggunakan fitur dari objek. Pendekatan menggunakan model akan mengalami banyak sekali kesulitan masalah pendeteksian objek akibat dari perubahan intensitas warna dan bentuk dari objek. Masalah segmentasi objek terjadi apabila objek mengalami oklusi atau penyatuan dengan objek lainnya. Segmentasi juga akan sulit dilakukan apabila bentuk dari objek berubah-ubah akibat pergerakan objek dan posisi kamera yang beragam. Masalah intensitas warna terjadi apabila pemantauan dilakukan pada lingkungan diluar ruangan, terutama karena perubahan intensitas cahaya matahari berubah sepanjang hari.
Pendekatan yang lebih baik coba dilakukan dengan menggunakan model fitur pada objek. Seperti yang dijelaskan oleh Sahagun (2007) pada penelitian pemantauan pejalan kaki, pemilihan penggunaan pendekatan titik fitur karena titik fitur cukup
tangguh dalam men gatasi oklusi atau kep adatan objek karena tidak tergantun g dari kelen gkap an bentuk objek melainkan berdasark an data intrinsik dari titik fitur sep erti p ergerakkan dan jarak antar titik fitur. M enurut Lien (2007) menambahkan, titik fitur y ang tersebar p ada area latar seharusny a sangat dekat den gan masin g-masin g objek dan kemudian d ip ilih karen a leb ih baik d alam merep resentasikan objek dalam p ergerakkan objek y ang khas.
Tantangan p emantauan den gan p enggunaan titik fitur adalah keterbatasan merep resentasikan kendaraan berd asarkan p ergerakkanny a y ang k aku. Untuk mencoba menjawab tantangan tersebut mak a p eneliti mencob a men ggun akan tamb ahan algoritma dengan men ggunakan analisis relasi antar cluster menjad i kelo mp ok objek dan
p eny atuan objek y ang memilik i titik fitur y ang sama den gan ob jek lainny a.
3.2. Alur Penelitian
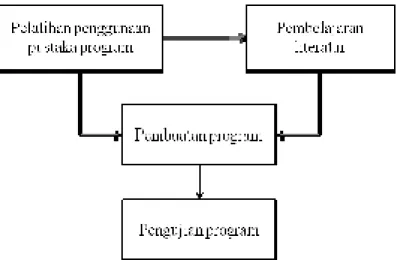
Untuk mencap ai tujuan dari p enelitian y aitu membuat dan menguji p rogram, maka p enelitian d ilakuk an dalam alur sebagai berikut.
Pada awal penelitian, peneliti melakukan pelatihan penggunaan program dan pustaka program yaitu mulai dari penggunaan Visual Studio 2008, Visual Studio 2010, Qt SDK, pustakacvBlobsLib, pustakaBoost, dan pustaka OpenCV dipergunakan untuk
menguji beberapa contoh aplikasi dari OpenCV ataupun contoh program dari pengembang lainnya, yaitu:
1. Pelatihan operasi dasar pustakaOpenCV, seperti load image, threshold, dilate/ erode, canny edge detection, fill and flood, rotate, and scale image.
2. Pelatihan contoh aplikasi Blob Detection menggunakan berbagai pustaka
hingga diperoleh hasil terbaik menggunakan pustakacvBlobsLib.
3. Pelatihan contoh aplikasi Background Subtraction menggunakan model
Statistical Gaussian Mixture dan model umum lainnya.
4. Pelatihan contoh aplikasi Blob Tracking dari pustaka OpenCV.
5. Pelatihan contoh aplikasi PyramidalOptical Flow menggunakan pustaka
OpenCV yang menjadi kelanjutan dari arah penelitian.
6. Pelatihan contoh aplikasi K-Means menggunakan pustakaOpenCV.
7. Pelatihan contoh aplikasi Shortest Spanning Tree menggunakan pustaka
Boost.
8. Pelatihan/ uji coba teori Coherence of Motion untuk mengelompokkan
titik-titik fitur.
Pembelajaran literatur dilakukan bergantian dengan pembelajaran pustaka program. Literatur ditekankan pada pembahasan analisis cluster dan titik fitur seperti
membahas tentang subtraksi latar, pendeteksian Good Feature, dan pelacakan
Lucas-Kanade juga dibahas untuk memahami penggunaan parameter pada pustaka program. Pembuatan program dilakukan secara terus menerus dengan melakukan pelatihan penggunaan pustaka dan pembelajaran literatur. Ketika sebuah ide dari pembelajaran literatur didapatkan, maka peneliti mencoba langsung membuat programnya. Pembuatan program juga dikerjakan dengan adanya pengujian, terutama pengujian terhadap kesalahan logika dan metode yang dipergunakan. Pengujian juga dilakukan untuk menentukan nilai parameter yang tepat yang dipergunakan pada masing-masing fungsi.
3.3. Perancangan Penelitian 3.3.1. Kebutuhan Perancangan
Perancangan memerlukan sebuah unit komputer, handycam, tripot, dan berbagai perangkat lunak yang dibutuhkan. Spesifikasi detil dari alat yang digunakan dijelaskan sebagai berikut.
3.3.1.1. S pesifikasi Komputer
1. Tipe komputer : ACER ASPIRE 4736G 2. Prosesor : Intel CoreTM2 Duo T6600
3. Kartu grafis : NVIDIA GeForce G105M 512MBVRAM 4. Ukuran layar : 14.0” HD LED LCD
5. Ukuran memori : 2 GB
3.3.1.2. S pesifikasi Kamera
1. Tipe kamera : Sony DCR-SX65E 2. Pengunaan tripot : Ya
3. Format perekaman : AVI 720 x 576 piksel
3.3.1.3. S pesifikasi Perangkat Lunak
1. Sistem operasi komputer : Windows 7 Ultimate Edition
2. SDK Compiler : Qt Creator 4.7.4
3. Pustaka : OpenCV 2.1
3.3.2. Perancangan Lingkungan Perekaman
Perancangan yang dilakukan tidak menggunakan kamera CCTV dan juga tidak terpasang di sudut-sudut jalur lalu lintas. Perancangan yang dilakukan kali ini adalah perancangan program secara mandiri, dimana kita menggunakan peralatan sendiri.
Pemantauan jalan secara mandiri kita lakukan dengan menggunakan sebuah
handycam dan tripot. Penggunaan tripot adalah untuk mendapatkan perekaman yang
bebas dari getaran tangan, karena apabila kamera bergetar maka video yang dihasilkan juga akan mengalami pergeseran. Pergeseran pada video, objek/ benda diam akan dianggap sebagai objek bergerak dan akan menganggu program pada area subtraksi latar dan pendeteksian titik fitur.
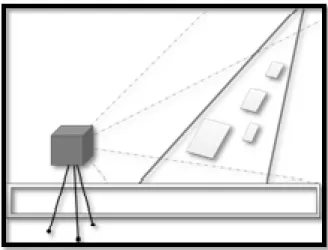
Pemantauan dengan menggunakan kamera direncanakan dan dilakukan diatas jembatan penyebrangan. Pengaturan tripot dan kemiringan kamera dilakukan hanya sebatas agar seluruh objek kendaraan dapat terlihat dengan jelas dari ujung ke ujung jalan pada sebuah lajur. Pengaturan sudut kemiringan kamera dan ketinggian kamera
tidak p erlu dip erhatikan dalam metode kali ini karen a didalam metode ini, bentuk, ukuran, dan jarak dari ob jek tidak dip erhatikan.
Gambar 3.2. M odel p osisi kamera dari atas jembatan p eny ebrangan.
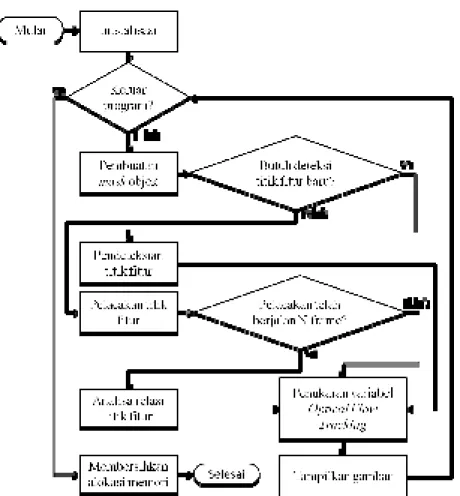
3.3.3. Perancangan Diagram Alir
Program dirancan g tidak men ggunakan ketergantun gan basis data y ang tersimp an dalam bentuk ap ap un secara p ermanen didalam harddisk, oleh karena itu
p rogram ini d ikatakan tergolon g dalam k elomp ok p rogram Unsupervised Learning.
Sehin gga baik p ertama kali p rogram d ijalankan atau dilakukan p ada kesemp atan berikutny a, p rogram ini ak an tetap berjalan den gan baik hany a den gan ketentuan p enggun aan kriteria dasar sep erti sp esifikasi alat, format video dan kelengkap an instalasi p rogram. Pro gram dirancan g untuk berjalan hin gga frame p ada vid eo hab is
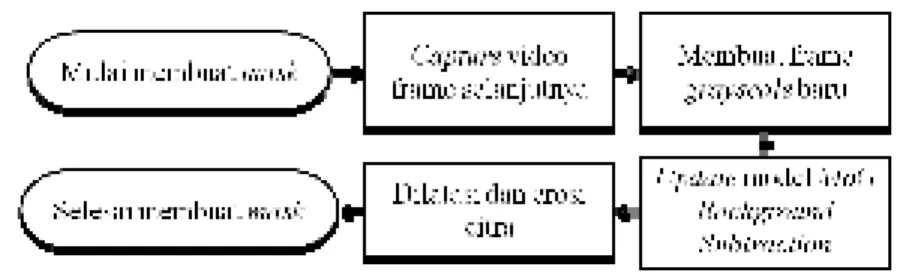
terlewati ataup un ketika p engguna. Berikut adalah aliran utama p rogram mulai dari awal hingga kelu ar dari p rogram.
Gambar 3.3. Aliran p roses utama p rogram.
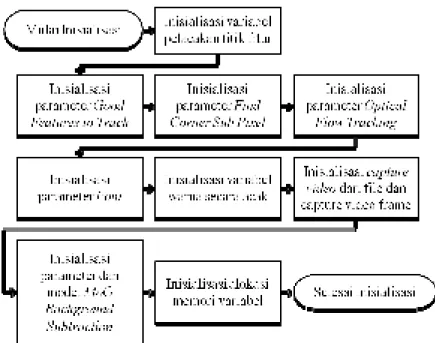
3.3.3.1. Inisialisasi
Inisialisasi d ilakuk an p ada saat konstruktor dari objek kelas dijalank an. Peman ggilan konstruktor p ada p rogram in i h any a dilakuk an k etika objek kelas d ibuat sehingga inisialisasi h any a dilakukan sekali saja selama p rogram tersebut dijalankan. Inisialisasi bisa ju ga disebut konfigurasi variabel d an p arameter y an g d igunakan didalam p rogram sep erti terlihat p ada gambar berikut.
Gambar 3.4. Aliran p roses inisialisasi p arameter dan variabel.
Pertama, inisialisasi dilakuk an untuk memberik an nilai awal p ada variabel-variabel y ang d igunakan d iseluruh b agian p rogram, sep erti p enanda waktu untuk melakuk an deteksi titik fitur ulang, p enanda dan p engh itung ju mlah frame, p enghitung
jumlah titik fitur, dan seb againy a. Pada awal p rogram berjalan p enanda aktifitas p endeteksian titik fitur baru harus dan wajib dilakuk an. Dan analisis relasi titik fitur dilakukan d alam kurun waktu setiap tujuh frame sekali.
Kedua, inisialisasi d ilakuk an untuk memberikan n ilai p arameter p enggunaan fungsi Good Features to Track sep erti kualitas p endeteksian (nilai kualitas adalah 0.4),
jarak minimum p endeteksian antar dua buah titik fitur (men ggun akan jarak 5 p iksel sesuai kebutuhan ukuran vid eo dan jumlah titik fitur), ukuran dari jendela (ukuran y ang dip ergunakan ad alah 2 p iksel) y ang dip ergunakan, p enanda p enggunaan metode Harris
(dalam hal ini tidak digunak an artiny a p enanda diberi nilai no l), dan ukuran dari nilai level k (0.04) y an g dip ergun akan.
Ketiga, inisialisasi dilakukan untuk memberikan nilai parameter penggunaan fungsi Find Corner Sub Pix seperti ukuran dari jendela, kriteria perulangan (jumlah
perulangan yang dipergunakan adalah 20, dan nilai epsilon yang dipergunakan adalah 0.03), dan zero zone yang dipergunakan adalah -1.
Keempat, inisialisasi dilakukan untuk memberikan nilai parameter penggunaan fungsi Optical Flow Tracking seperti level tracking yang dipergunakan yaitu bernilai 7,
inisialisasi error tracking sama dengan nol, inisialisasi flag aktifitas pemantauan sama
dengan nol.
Kelima, inisialisasi parameter font yaitu inisialisasi tipe garis sama dengan
CV_AA, tipe teks sama dengan CV_FONT_HERSHEY_COMPLEX_SMALL, inisialisasi pemasangan font, dan inisialisasi ukuran dan font. Font disini dipergunakan
untuk menuliskan identitas cluster atau objek pada layar gambar.
Keenam, inisialisasi variabel warna ditentukan secara acak dan maksimal warna yang disimpan adalah sebanyak jumlah objek yaitu 50 objek. Warna dipergunakan untuk membedakan penulisan identitas objek yang berbeda.
Ketujuh, inisialisasi dilakukan untuk memasang capture video yang berasal
dari file berformat AVI ataupun MPEG. Video yang dipasang dipilih sendiri oleh pengguna program, apabila format video tidak valid, maka aktifitas pemantauan tidak dapat dilakukan hingga format video sesuai ataupun pemasangan capture video berhasil.
Kedelapan, inisialisasi dilakukan untuk memberikan nilai parameter penggunaan fungsi subtraksi latar MoG. Background threshold yang dipergunakan
adalah 0,4. Standart threshold yang dipergunakan adalah 4. Window size yang
dipergunakan adalah 20 piksel. Level gaussian yang dipergunakan adalah 5. Inisial
adalah 28. M inimum area y ang dip ergunak an adalah 5. Setelah p arameter dari fungsi model gaussian sudah didefinisik an, kemudian p arameter tersebut dip asang p ada fungsi p embuatan subtraksi latar M oG.
Kesembilan, inisialisasi d ilakuk an untuk men galokasikan memori variabel didalam memori komp uter y ang dip ergun akan untuk melakukan aktifitas p emantauan. Variabel y ang dip ergun akan antara lain sep erti variabel gambar, variab el counter dan flag, dan variablep enamp ung hasil p erhitungan analisis cluster dan objek.
3.3.3.2. Pembuatan Mask Objek
Pembuatan mask area p endeteksian titik fitur dilakukan secara berulan g ketika
frame baru d ari v ideo d idap atkan. Gambar berikut menjelaskan alur p roses dari
p embuatan mask dimana alat utama dari p embuatan mask adalah den gan melakukan
subtraksi latar untuk setiap frame baru y ang didap atkan.
Gambar 3.5. Aliran p roses p embuatan mask area p endeteksian titik fitur.
Tahap p ertama y ang dilakukan adalah mendap atkan citra b aru dari vid eo, selanjutny a citra tersebut diubah menjadi grayscale den gan men ggun akan p ersamaan
khusus y ang telah dijelaskan seb elumny a. Citra grayscale meman g tidak dip ergunakan
didalam p embuatan mask, tetap i akan dip ergunakan d idalam p endeteksian dan
p elacakan titik fitur di tahap selan jutny a. Kemudian subtraksi latar di update untuk
didap atkan kemudian akan dip erbaik i den gan men ggunak an p roses dilatasi dan erosi sehingga citra blob akan tersatukan lebih semp urna dengan sekitarny a.
3.3.3.3. Pendeteksian Titik Fitur
Pada awal p rogram dijalank an, p endeteksian titik fitur dilakukan sebab belu m ada satup un titik fitur y ang terdeteksi. Pendeteksian titik fitur dilakukan setiap N frame
sesuai dengan jumlah y ang telah ditentukan, dalam p ercobaan kali ini digunak an 7
frame sekali untuk setiap p endeteksian titik fitur. Alur p roses p endeteksian titik fitur
adalah seb agai b erikut.
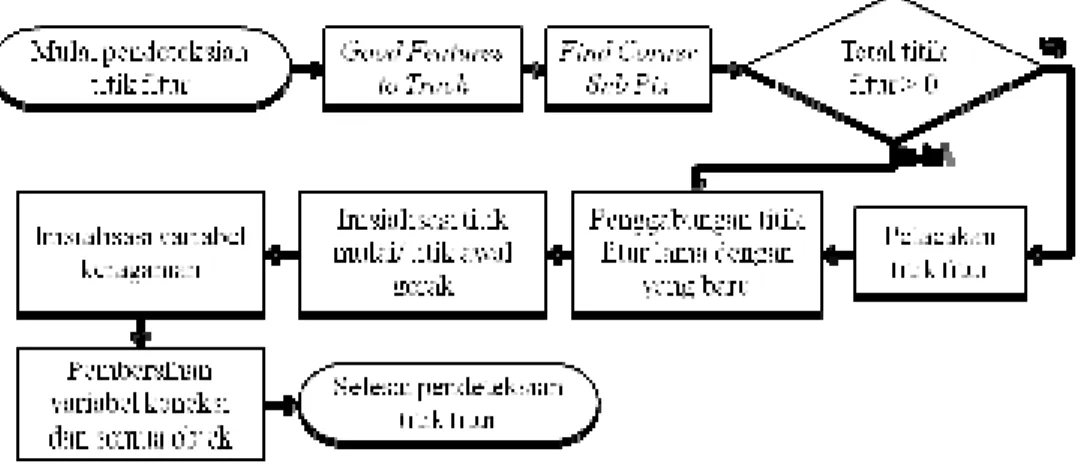
Gambar 3.6. Aliran p roses p endeteksian titik fitur.
Peran utama dalam p endeteksian titik fitur dip erankan oleh fun gsi Good Features to Track dan Find Corner Sub Pix. Titik fitur dideteksi dan d ihitung oleh
fungsi Good Feature to Track sedan gkan p eletakkan p osisi titik tersebut didalam area
p iksel adalah den gan men ggun akan fun gsi Find Corner Sub Pix.
Titik-titik fitur baru y ang telah terdeteksi, selanjutny a digabun gkan den gan titik fitur lama y ang telah dideteksi sebelumny a. Sebelum digabun gk an, p osisi titik fitur lama p ada frame baru p erlu diketahui, oleh karen a itu p elacak an titik fitur p erlu dijalankan satu
kali p ada frame terbaru. Langk ah selanjutny a adalah men ggabun gkan kedu a kelomp ok
titik-titik fitur lama dan baru tersebut dengan men ggunak an p erulan gan sejumlah total titik fitur dari kedua kelomp ok tersebut.
Pendeteksian titik fitur selalu dilakukan setelah analisis titik fitur dan segmentasi objek oleh karen a itu p ada tahap ini juga p erlu dilakuk an in isialisasi ulan g terhadap variabel y ang d ibutuhkan dalam melakukan analisis sep erti variabel-variabel keragaman, variabel-variabel titik awal gerak, d an variabel-variabel bobot koneksi untuk dip ergunakan d alam analisis selan jutny a.
3.3.3.4. Pelacakan Titik Fitur
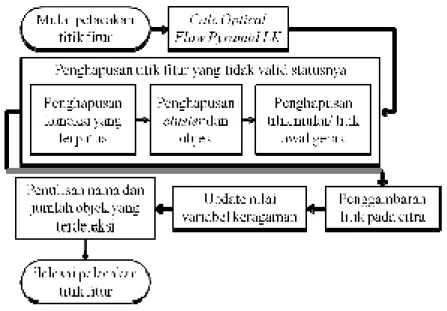
Pelacak an titik fitur dip erankan utama oleh fungsi Calc Optical Flow Pyramid LK. Alur p roses p elacakan titik fitur digamb arkan sebagai berikut.
Gambar 3.7. Aliran p roses p elacakan titik fitur.
Pada p roses p ertama dijalankan fun gsi Calc Optical Flow Pyramid LK dimana
berdasarkan metode pelacakan Lucas-Kanade dengan mengimplementasikan citra
pyramid untuk memperbesar peluang keberhasilan pelacakan pada frame baru.
Pelacakan titik fitur bisa saja berhasil ataupun gagal. Terdapat dua kemungkinan gagal yaitu pertama pelacakan gagal akibat perubahan tekstur citra dan kedua pelacakan gagal akibat titik fitur bergerak keluar dari area citra. Kegagalan tipe pertama dapat ditangani dengan memposisikan titik fitur pada jarak terdekat dari posisi sebelumnya. Pelacakan titik fitur jarang menghasilkan pelacakan yang sempurna, oleh sebab inilah getaran dari titik fitur terjadi. Kegagalan tipe, kedua titik-titik fitur tersebut tidak dapat dilacak kembali dan statusnya menjadi tidak valid lagi. Oleh karena itu, perlu penyesuaian seperti menghapus koneksi yang terhubung dengan titik fitur, menghapus indeks titik fitur pada objek, dan menghapus titik awal gerak yang memiliki indeks yang sama dengan titik fitur. Penghapusan dilakukan sebab analisis gerak objek berkorelasi langsung dengan keberadaan titik fitur yang masih valid karena gerak titik fitur yang dilakukan adalah gerak nyata objek pada citra.
Penggambaran titik fitur pada citra dilakukan untuk melihat keberhasilan dari segmentasi objek sehingga keanehan/ kesalahan logika pada program seperti hilangnya titik fitur yang tidak wajar dan kesalahan penyambungan koneksi antar titik fitur dapat terlihat dengan jelas.
Nilai keragaman koneksi antar titik fitur didapatkan dengan menghitung jumlah jarak koneksi dan jarak koneksi kuadrat dalam N frame sehingga perhitungan
dilakukan pada setiap frame perpindahan titik fitur. Terkecuali pelacakan yang
dilakukan dalam tahap pendeteksian titik fitur, perubahan nilai keragaman tidak lagi dipergunakan sebab nilai keragaman telah dipergunakan dalam analisis gerak titik fitur di tahap sebelumnya.
Penulisan identitas dan jumlah objek y an g telah terdeteksi/ tersegmentasi dip ergunakan sup ay a p enggun a ap likasi dap at mengetahui ju mlah kendaraan y ang ada p ada citra dan jumlah seluruh kendaraan y ang ada p ada citra dan ju ga kendaraan y ang telah lewat.
3.3.3.5. Analisis Relasi Titik Fitur
Analisis relasi titik fitur dilakukan setiap N frame sekali, sebab d alam frame-frame sebelumny a p erlu dip ersiap kan variabel keragaman jarak dari titik fitur. Setelah
nilai variabel y ang dibutuhkan telah did ap atkan, maka selan jutny a p roses men ghitung bobot koneksi dan reduksi koneksi sep erti y ang dijelaskan oleh alur berikut.
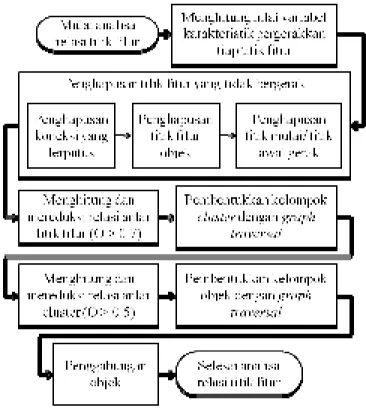
Gambar 3.8. Aliran p roses analisis relasi titik fitur.
Pertama kali y ang dilakukan dalam p roses analisis relasi titik fitur adalah men ghitung karakteristik dari tiap titik fitur sep erti jarak dan arah p ergerakkan.
Keduanya akan dipergunakan untuk menghitung nilai spq,movement dan spq,direction
perbandingan jarak dan arah pergerakkan antara titik p dan q.
Berdasarkan nilai pergerakkan sebuah titik fitur, titik fitur tidak valid keberadaannya apabila bergerak sangat sedikit karena identik dengan pergerakkan getaran dari titik fitur. Penyaringan ini dilakukan karena adanya titik fitur yang terdeteksi pada area latar akibat dari pembuatan mask yang tidak sempurna ataupun
akibat titik fitur yang terjebak diarea latar karena gagal dalam pelacakan. Penyaringan dilakukan dengan menghapus titik fitur tersebut, dan sebagai akibatnya juga perlu dilakukan penghapusan titik fitur pada objek dan variabel yang berkaitan yaitu koneksi dan titik awal gerak.
Pada tahap selanjutnya yang tersisa adalah titik fitur yang dapat dipercaya untuk merepresentasikan pergerakkan dari objek. Kemudian titik fitur dikelompokkan menjadi kelompok cluster dan objek dengan menentukkan koneksi yang baik dan
dikelompokkan dengan menggunakan metode graph traversal.Objek yang terbentuk
kemudian direduksi kembali dengan melakukan penggabungan objek.
3.3.3.6. Penukaran Variabel Optical Flow Tracking
Fungsi Optical Flow Tracking memerlukan dua buah citra grayscale dan dua
buah citra pyramid dimana satu citra dipergunakan untuk mengetahui posisi titik
sebelumnya dan satu citra dipergunakan untuk mengetahui posisi titik pada frame baru.
Oleh karena itu ketika pelacakan selesai, variabel citra lama diganti dengan citra yang baru dan citra baru digantikan dengan perolehan frame selanjutnya pada video. Proses
3.3.3.7. Tampilkan Gambar
Penampilan gambar titik fitur, kelompok cluster, kelompok objek, jumlah objek, jumlah total objek, dan spesifikasi dari video semuanya ditampilkan sebagai
output dari aplikasi. Setiap frame selalu ditampilkan citra baru dengan informasi yang
baru juga. Penampilan berbagai informasi tersebut memang dipergunakan untuk menunjukkan hasil dari segmentasi objek dan informasi pada objek.
3.3.3.8. Membersihkan Alokasi Memori
Pada bagian akhir dari program ketika frame telah habis ataupun pengguna telah memilih untuk keluar dari program, maka akan dijalankan fungsi destruktor yang didalamnya berisikan pemanggilan fungsi-fungsi untuk membersihkan memori komputer yang telah dipergunakan.
3.3.4. Perancangan Tampilan Program
Pada awal pengembangan program, program dirancang berbentuk aplikasi
console dan pada dasarnya tampilan yang diharapkan dapat menampilkan informasi
video, identitas dari objek, jumlah objek pada layar, dan jumlah total objek yang terhitung. Kemudian selanjutnya program dikembangkan dengan berbentuk aplikasi GUI dengan menu pemilihan video, penampilan original tracking seperti pada aplikasi console, penampilan feature point tracking, penampilan cluster tracking, penampilan object tracking, dan penampilan hasil pendeteksian dalam 4 arah gerak objek.
Gambar 3.9. Perancan gan awal tamp ilan p rogram.
Pada p erancan gan tersebut setiap objek diberikan label id entitas objek. M isalkan, obj: 2, artiny a objek tersebut merup akan objek beridentitas 2 y ang ada p ada lay ar. Current object(s) menun jukkan jumlah objek y ang ada di lay ar p ada saat itu. Total object(s) menunjukkan jumlah seluruh objek y ang telah terhitung. Image (w x h)
dan frame rates merup akan informasi ukuran dan k ecep atan video y an g dip ergunakan
agar p emakaianny a sesuai den gan standar min imum y an g disarank an.
3.3.5. Perancangan Pengujian Program
Pengujian d ilakuk an untuk setiap aktifitas, mulai dari hasil p ersiap an data hingga hasil dari setiap segmentasi objek. Pengujian hasil akhir p endeteksian dilakukan dengan men ggunak an beberap a samp el video den gan ukuran leb ar dan tinggi p ixel dan frame rate y ang sudah ditentukan, serta kondisi siang hari dan cuaca y ang cerah. Video y ang dip ergunakan hany a memantau satu arah lajur lurus dengan tingk at kep adatan y ang bervariasi.
Beberapa hal yang diuji dalam pembuatan program antara lain:
1. Pengujian hasil terbaik dari subtraksi latar, pendeteksian titik fitur dan
pelacakan titik fitur.
2. Pengujian penghapusan titik fitur yang tidak valid dari frame satu ke frame selanjutnya.
3. Pengujian penghapusan titik fitur yang bergerak sangat sedikit yang dianggap sebagai titik background.
4. Pengujian pembentukkan kelompok cluster.
5. Pengujian pembentukkan objek dan penambahan titik dalam klasifikasi sebuah objek.
6. Pengujian reduksi jumlah objek dengan penggabungan objek. 7. Pengujian penjagaan hasil tracking dari setiap titik objek.