IMPLEMENTASI ULTRASONIK LEVEL DETEKTOR PADA SISTEM
MONITORING TANGKI PENDAM PADA SPBU.
Yuda Kurniawan - 2206 100 552
Jurusan Teknik Elektro – FTI, Institut Teknologi Sepuluh Nopember
Kampus ITS, Surabaya – 60111
Sistem monitoring Penyediaan BBM di SPBU saat ini banyak di gunakan. Dalam hal ini terdapat kendala yang sering dihadapi karena belum menggunakan sistem otomatis. Monitoring pengukuran level ketinggian BBM didalam tangki menggunakan garis ukur.
Pada Tugas Akhir ini telah dirancang alat ukur level ketinggian menggunakan aplikasi gelombang ultrasonik dengan cara time of flight. Sistem alat terdiri dari transmiter, receiver ultrasonik yang berbasis mikrokontroler ATMega8535. Transmiter dan receiver di arahkan ke tangki. Dimana jarak berbanding lurus dengan waktu pemancaran transmiter sampai diterima kembali oleh receiver.
Setelah di lakukan pengujian di tabung uji dengan hasil ketelitian rata-rata 0,59 %. Ultrasonik menggunakan pemancaran gelombang untuk mengetahui level ketinggian sehingga tidak memiliki resiko yag membahayakan. Untuk Komunikasi 485 bisa mencapai jarak 1 Km.
1. PENDAHULUAN
Sistem monitoring tangki pendam pada saat ini banyak di gunakan pada SPBU – SPBU Pertamina, terutama digunakan untuk mengetahui stok bbm yang tersisa sehingga memudahkan SPBU untuk mengetahui kapan waktu yang tepat untuk memesan bbm kembali. Selain itu jika digabungkan dengan penjualan pada pompa penjualan bbm maka SPBU dapat mengetahui keuntungan dan kerugian yang dialami pada satu waktu tertentu.
2. TEORI PENUNJANG 2.1 Mengukur Jarak Dengan Ultrasonik
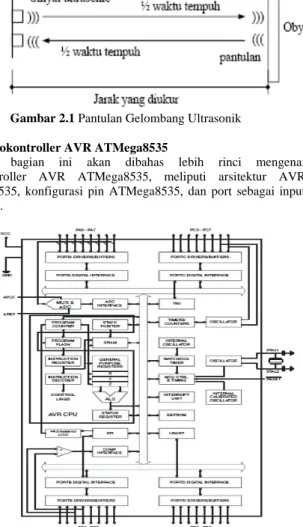
Metode yang digunakan unuk mengukur jarak objek dengan ultrasonik disebut Echo yang memanfaatkan pemancaran gelombang transmiter ultrasonik yang mengenai suatu benda kemudian dipantulkan kembali ke asal sinyal kemudian diterima oleh Receiver ultrasonik.
Sensor Ultrasonik mendeteksi jarak obyek dengan cara memancarkan gelombang ultrasonik (40 kHz) selama selang waktu yangg telah ditentukan kemudian mendeteksi pantulan oleh benda tersebut. Gelombang ultrasonik ini melalui udara dengan kecepatan kurang lebih 344 meter per detik, Tranduser ultrasonik mengeluarkan pulsa atau memancarkan gelombang ultrasonik (Transmiter) dan setelah gelombang pantulan terdeteksi tranduser ultrasonik (Receiver) akan membuat output tertentu sebagai tanda bahwa gelombang sudah diterima untuk mematikan timer pengukur waktu sinyal dari transmiter sampai ke Receiver . Lama waktu tempuh gelombang ultrasonic hasil pantulan dari objek diukur, Maka jarak dapat diukur dengan persamaan:
Gambar 2.1 Pantulan Gelombang Ultrasonik 2.2 Mikrokontroller AVR ATMega8535
Pada bagian ini akan dibahas lebih rinci mengenai mikrokontroller AVR ATMega8535, meliputi arsitektur AVR ATMega8535, konfigurasi pin ATMega8535, dan port sebagai input dan output.
Gambar 2.22 Blok Diagram Arsitektur ATMega8535 AVR merupakan seri Mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving. Beberapa diantaranya mempunyai ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI. Chip AVR yang digunakan untuk
kapasitas FLASH 16K words ( 32K bytes ). Dimana panjang baris program yang akan di download ke mikrokontroler membutuhkan kapasitas yang cukup besar,untuk lebih mudah dalam berkreasi menulis program.
Blok diagram dari Mikrokontroller dapat dilihat pada gambar 2.22.
2.3 Teori Dasar Keypad
Keypad adalah penghubung antara pemakai dengan alat pengendali yang dibuat. Keypad yang dipakai mempunyai 12 buah tombol yang tersusun dalam bentuk matriks 3 X 4. Tombol – tombol ini dipakai untuk menjalankan beberapa fungsi pengendalian seperti misalnya untuk on/off dan pilihan menu.
Gambar 2.26 keypad 3X4
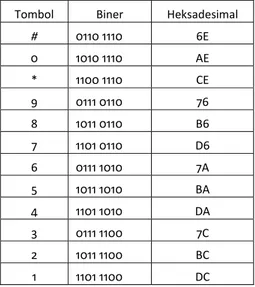
Pada keypad ini jika ada penekanan tombol, maka akan terbentuk kombinasi logika akibat terhubungnya baris dan kolom seperti yangterlihat pada tabel di bawah ini.
Tabel 2.6 Fungsi Keypad.
Tombol Biner Heksadesimal
# 0110 1110 6E 0 1010 1110 AE * 1100 1110 CE 9 0111 0110 76 8 1011 0110 B6 7 1101 0110 D6 6 0111 1010 7A 5 1011 1010 BA 4 1101 1010 DA 3 0111 1100 7C 2 1011 1100 BC 1 1101 1100 DC 2.4 Teori Relay
Standard RS-485 mendukung komunikasi data half-duplex, ini berarti bahwa untuk mengirimkan dan menerima data hanya menggunakan 2 jalur kabel. Spesifikasi dari standar ini mampu mendukung komunikasi data dari sejumlah perangkat dan juga mampu menyangga komunikasi data dalam jarak hingga 1200 meter. Sambungan dari tiap perangkat yang
terhubung ke RS-485 dilakukan secara paralel, sehingga penyambungan maupun pelepasan perangkat dapat dilakukan tanpa
mengganggu kerja seluruh jaringan. Untuk menyesuaikan impedansi kabel yang digunakan perlu dipasang
resistor yang nilainya disesuaikan dengan karakteristik impedansi kabel (~ 120 Ohm). Topologi jaringan komunikasi data menggunakan RS-485 dapat dilihat pada gambar berikut.
Gambar 2.28 Topologi pengkabelan RS-485
RS-232 adalah interface yang paling umum digunakan untuk berkomunikasi secara serial, tapi mempunyai batas-batas tertentu. RS-232 (single ended) yang dikenalkan tahun 1962 ini sepertinya telah menjadi primadona di seluruh industri. Spesifikasi transmisi data dari transmiter ke receiver rata-rata lambat (20 Kbit/second) dan jarak pendek (50 kaki dengan rata-rata data maksimum). RS-232 populer dikarenakan ketersediaannya, kemurahannya, dan dapat menggunakan kabel yang lebih panjang dibandingkan opsi-opsi lainnya. Channel-chanel independen dibuat untuk komunikasi dua
arah (full-duplex). Sinyal RS-232 diwakili oleh voltase sistem umum. RS-232 mempunyai jalur hanshaking yang banyak, dan juga menspesifikasi protokol komunikasi. Sinyal jenis ini bekerja baik dalam komunikasi point to pont pada rata-rata transmisi data rendah. Suatu interface dapat menggunakan port yang ada pada
komputer, atau perlu tambahan port atau adapter. Kebanyakan PC setidaknya mempunyai interface RS-232. Port RS-232 pada PC merupakan single device. Sinyal RS-232 membutuhkan ground antara PC dan peralatan yang terhubung. Jarak kabel harus dibatasi 1 sampai 200 kaki pada data
asyncronous dan sekitar 50 kaki dengan data syncronous. Data syncronous mempunyai jam transmite dan receive yang membatasi jarak maksimum pada saat menggunakan suatu jalur data syncronous. RS-232 menentukan arti perbedaan serial sinyal dan pin penugasan pada standar 25 pin (DB-25). Karena RS232 menentukan sinyal yang tidak digunakan bagi kebanyakan komunikasi standar, kadang-kadang konektor DB-25 kehilangan pin yang tidak dibutuhkan. Pendeknya, port RS-232 didesain untuk berkomunikasi
dengan peralatan lokal dan akan mendukung 1 driver dan 1 receiver.
3 PERANCANGAN ALAT 3.1 Blok Diagram Alat
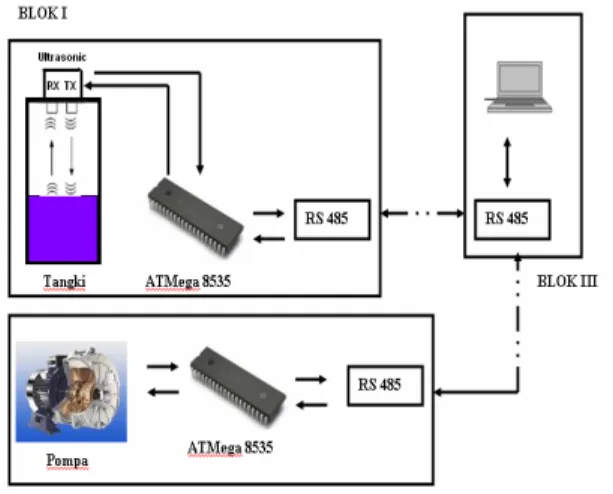
Pada bab ini dibahas mengenai perancangan alat secara keseluruhan. Baik hardwere (rangkaian dan sistem mekanik) maupun softwere. Dijelaskan pula lebih terinci tiap-tiap bagian atau modul-modul penyusun alat ini yang terdiri dari Blok I ,II dan III .
Gambar 3.1 Blok Diagram
Pada gambar 3.1 dapat dilihat konfigurasi sistem secara keseluruhan dalam bentuk blok diagram. Terdapat beberapa komponen penting yang menyusun sistem di Blok I , II dan III.
Adapun fungsi masing - masing dari blok pada gambar diagram blok diats dapat dijelaskan sebagai berikut:
1. Blok I.
Pada Blok I ini berfungsi untuk mengetahui level dari tangki pendam, dimana bagian-bagiannya adalah sensor ultrasonik yang terdiri dari transmiter dan receiver , mikrokontroller 8535 , komunikasi 485 2. Blok II.
Pada Blok II ini berfungsi untuk mengeluarkan bbm , dengan menggunakan pompa, dimana bagian-bagiannya adalah driver motor pompa , mikrokontroller 8535 dan komunikasi 485.
3. Blok III.
Pada Blok III ini berfungsi untuk menampilkan data dari blok I dan blok II ke dalam PC.dimana bagian-bagiannya adalah komunikasi 485 dan software di PC yang menggunakan Visual Basic.
3.2 Blok I.
Transmiter Ultrasonik
Transmiter ini dibuat untuk memperkuat daya pancar sinyal kotak sebesar 40 KHz. Untuk memperkuat daya pancar sinyal yang perlu dipertimbangkan adalah bagaimana memperbesar level tegangan dan arusnya karena daya adalah perkalian arus dan tegangan . Dalam rangkaian ini digunakan satu IC CMOS Inverter 4069 karena level tegangan supply maksimum 18V tidak seperti IC TTL yang memiliki supply maksimum 5V. IC ini terdiri dari 6 buah inverter dan dirangkai seperti gambar 3-7 diberi supply tegangan 9V. Level tegangan input 5 V dari mikrokontroler dikuatkan 2 kali menjadi 10 V dengan pembalikan fase oleh inverter pin 9.Tegangan 5V yang berkebalikan fase dijumlahkan sehingga tegangan output menjadi 2 kali lipat sebesar 10V. Karena ada pembalikan fase maka dibutuhkan kapasitor untuk melewatkan sinyal AC yang terbentuk. +9 1 2 40kHz XTAL 1 2 3 IC2A 4081N 30pF C1 30pF C2 R1 4.7k PD.6 R 2 10k +9 +5 1 2 U?A 4049N 1 2 U?A 4049N 1 2 ?A 4049N 1 2 A 4049N C3 100nF Transmitter R 3 150k 1 2 U?A 4049N Q? C9013 1 2 ?A 4049N
Gambar 3.7 Transmiter Ultrasonik 3.2.3 Receiver Ultrasonik
Saat gelombang ultrasonik dikeluarkan oleh transmiter, receiver ultrasonik siap untuk menerima gelombang ultrasonik yang telah dipantulkan oleh benda dan jika receiver menerima gelombang ultrasonic, tranduser akan beresonansi dan bergetar membentuk sinyal sinus. Sinyal sinus yang diperoleh dari receiver dikuatkan rangkaian penguat dengan umpan balik kolektor. Rangkaian ini dipilih karena kestabilan penguatan.
Gambar 3.8 Receiver Ultrasonik
Rangkaian receiver dapat dijelaskan sebagai berikut. Sinyal yang diterima tranduser (receiver) sangatlah kecil maka dikuatkan oleh penguat umpan balik kolektor. Penguat ini menggunakan transistor NPN BC9013, Rc=10Kohm dan Rb=220Kohm, dengan perhitungan sebagai berikut:
mA
k
V
I
C0
,
5
10
5
max=
Ω
=
(3. 1) V VCEmax=5 (3. 2)Hambatan Rb pada umpan balik kolektor ke basis berguna sebagai drop tegangan untuk mengaktifkan transistor, karena transistor ini akan aktif jika diberi tegangan 0,7V maka nilai Rb minimum yang dapat dipasang pada rangkaian ini adalah:
V
V
V
x
k
R
R
b b7
,
0
)
7
,
0
5
(
10
Ω
−
=
+
(3. 3) 4,3Rb=0,7Rb+7kΩ3
,
6
R
b= k
7
Ω
Rb=1,94kΩPada rangkaian ini dipakai hambataan Rb= 220 Kohm untuk menghasilkan penguatan yang diinginkan dan nilai hambatan ini sudah cukup untuk mengaktifkan transistor. Untuk perhitungan penguatannya adalah sebagai berikut:
c b BE CC B
R
R
V
V
I
β
+
−
=
k
x
k
V
V
10
100
220
7
.
0
5
+
−
=
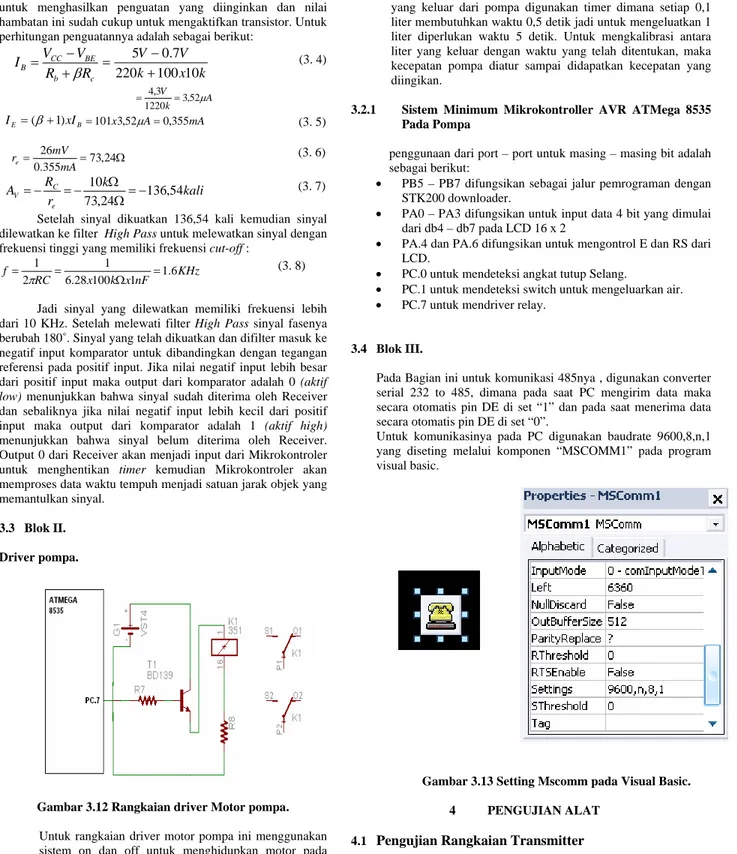
(3. 4) A k V μ 52 , 3 1220 3 , 4 = = B E xI I =(β+1) =101x3,52μA=0,355mA (3. 5) = =73,24Ω 355 . 0 26 mA mV re (3. 6) kali k r R A e C V 136,54 24 , 73 10 =− Ω Ω − = − = (3. 7) Setelah sinyal dikuatkan 136,54 kali kemudian sinyal dilewatkan ke filter High Pass untuk melewatkan sinyal dengan frekuensi tinggi yang memiliki frekuensi cut-off :KHz nF x k x RC f 1.6 1 100 28 . 6 1 2 1 = Ω = = π (3. 8) Jadi sinyal yang dilewatkan memiliki frekuensi lebih dari 10 KHz. Setelah melewati filter High Pass sinyal fasenya berubah 180˚. Sinyal yang telah dikuatkan dan difilter masuk ke negatif input komparator untuk dibandingkan dengan tegangan referensi pada positif input. Jika nilai negatif input lebih besar dari positif input maka output dari komparator adalah 0 (aktif low) menunjukkan bahwa sinyal sudah diterima oleh Receiver dan sebaliknya jika nilai negatif input lebih kecil dari positif input maka output dari komparator adalah 1 (aktif high) menunjukkan bahwa sinyal belum diterima oleh Receiver. Output 0 dari Receiver akan menjadi input dari Mikrokontroler untuk menghentikan timer kemudian Mikrokontroler akan memproses data waktu tempuh menjadi satuan jarak objek yang memantulkan sinyal.
3.3 Blok II. Driver pompa.
Gambar 3.12 Rangkaian driver Motor pompa. Untuk rangkaian driver motor pompa ini menggunakan sistem on dan off untuk menghidupkan motor pada pompa, untuk itu maka menggunakan relay yang di driver oleh transistor BD139 yang difungsikan sebagai switching, untuk mengatur on off pada kaki basis
transistor digunakan port D.0. Untuk mengetahui jumlah liter yang keluar dari pompa digunakan timer dimana setiap 0,1 liter membutuhkan waktu 0,5 detik jadi untuk mengeluatkan 1 liter diperlukan waktu 5 detik. Untuk mengkalibrasi antara liter yang keluar dengan waktu yang telah ditentukan, maka kecepatan pompa diatur sampai didapatkan kecepatan yang diingikan.
3.2.1 Sistem Minimum Mikrokontroller AVR ATMega 8535 Pada Pompa
penggunaan dari port – port untuk masing – masing bit adalah sebagai berikut:
• PB5 – PB7 difungsikan sebagai jalur pemrograman dengan STK200 downloader.
• PA0 – PA3 difungsikan untuk input data 4 bit yang dimulai dari db4 – db7 pada LCD 16 x 2
• PA.4 dan PA.6 difungsikan untuk mengontrol E dan RS dari LCD.
• PC.0 untuk mendeteksi angkat tutup Selang.
• PC.1 untuk mendeteksi switch untuk mengeluarkan air. • PC.7 untuk mendriver relay.
3.4 Blok III.
Pada Bagian ini untuk komunikasi 485nya , digunakan converter serial 232 to 485, dimana pada saat PC mengirim data maka secara otomatis pin DE di set “1” dan pada saat menerima data secara otomatis pin DE di set “0”.
Untuk komunikasinya pada PC digunakan baudrate 9600,8,n,1 yang diseting melalui komponen “MSCOMM1” pada program visual basic.
Gambar 3.13 Setting Mscomm pada Visual Basic. 4 PENGUJIAN ALAT
4.1
Pengujian Rangkaian Transmitter
Pengujian pertama kali dilakukan pada bagian oscillator yang berada pada bagian transmitter. Pengujian ini dilakukan untuk mengetahui kerja modul oscillator baik dalam hal frekuensi sinyal,
bentuk sinyal dan stabilitas sinyal ketika rangkaian dihubungkan dengan rangkaian lain dan tranduser.
Seperti yang telah diterangkan pada bab tiga bahwa penulis memilih oscillator jenis crystal oscillator karena mempertimbangkan stabilitas pada frekuensi outputnya
Gambar 4.4 Sinyal Kotak 40 KHz
Gambar 4.5 Sinyal Aktif Low dari Mikrokontroller
Gambar 4.6 Output Sinyal dari Gerbang AND
Gambar 4.7 Output Sinyal Setelah Dikuatkan
4.2
Pengujian Rangkaian Receiver
Saat gelombang ultrasonik dikeluarkan oleh transmiter, receiver ultrasonik siap untuk menerima gelombang ultrasonik yang telah dipantulkan oleh benda dan jika receiver menerima gelombang ultrasonic, tranduser akan beresonansi dan bergetar membentuk sinyal sinus
Gambar 4.8 Sinyal Ultrasonik yang diterima receiver sebelum dikuatkan
Gambar 4.9 Sinyal Ultrasonik yang diterima receiver sesudah dikuatkan
Gambar 4.10 Sinyal yang dipancarkan (atas) diterima Receiver Ultrasonik ( bawah )
4.3 Pengujian Hasil Pelatihan Data
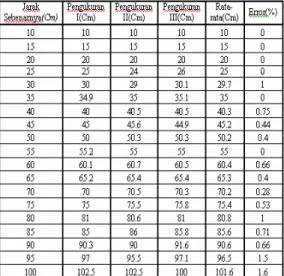
Pengukuran ketelitian jarak ukur merupakan faktor penting dalam pembuatan alat ini, Ketelitian yang baik akan menentukan tingkat ketelitian dalam menentukan posisi benda. Data hasil pengujian ketelitian pengukuran jarak dapat dilihat pada tabel 4.1.
Tabel 4.1 Ketelitian Pengukuran Jarak
(4.1)
dimana: x2 = output yang diinginkan
x1 = output hasil pengukuran
Dari data diatas dapat dilihat bahwa Ultrasonik mampu mengukur jarak dengan ketelitian yang baik, walaupun ada kesalahan itupun hanya sedikit.
4.4 Pengujian Pompa .
Pengukuran ketelitian Volume yang keluar dari pompa merupakan faktor penting dalam pembuatan alat ini, Ketelitian yang baik akan menentukan tingkat ketelitian dalam menentukan Volume yang dikeluarkan. Berikut ini tabel hasil pengujian.
Tabel 4.3 Tabel Ketelitian volume yang dikeluarkan pompa.
Dari data diatas dapat dilihat bahwa rata –rata errornya adalah (-10+0-10+10-20) / 5 = 2 %.
5 PENUTUP 5.1 Kesimpulan
Setelah melakukan perencanaan dan pembuatan sistem kemudian dilakukan pengujian dan analisanya, maka dapat diambil beberapa kesimpulan dari hasil akhir pembuatan alat ini yaitu:
1. Tranduser Ultrasonik bekerja pada frekuensi 40±1 KHz sesuai yang ada pada Data Sheet setelah dilakukan percobaan.
2. Sensor level air dengan ultrasonik sudah cukup baik karena mempunyai rata – rata error sebesar 0.59 % sehingga termasuk dalam kategori kecil.
3. System yang di buat memiliki error kurang lebih 0 %. 5.2 Saran
Rancangan alat ini masih berbentuk model yang nantinya akan direalisasikan menjadi alat yang sebenarnya dan siap untuk digunakan. Berdasarkan hasil pengujian, Alat ini memungkinkan untuk direalisasikan. Ada beberapa parameter yang harus diperhatikan jika ingin mengembangkan alat ini lebih lanjut antara lain:
1. Transmiter Ultrasonik harus memiliki daya pancar yang besar untuk memperpanjang jarak jangkauan.
2. Diharapkan sistem alat ini dapat dikembangkan lebih lanjut, terutama pengembangan pada sensor ultrasonik.
DAFTAR PUSTAKA
[1] Basha,
E., Rus, D.,Design of Early Warning Flood Detection System for Developing Countries,<URL:http:// http://groups.csail.mit.edu/drl/wiki/images/e/e0/BashaICTD07 SAT.pdf>.[2] _____, 2003, Atmega8535(L) , <URL:http://www.atmel.com/
>
[3] LCD module user manual, Eltech
[4] Mubarok., H., 2008. Kamera Penjejak Objek Bergerak dengan Menggunakan Sensor Ultrasonik, Tugas Akhir, Teknik Elektro ITS Surabaya.
RIWAYAT HIDUP PENULIS
Yuda Kurniawan adalah seorang anak manusia yang dilahirkan di Surabaya, 22 Juni 1984. Merupakan anak ketiga dari tiga bersaudara pasangan Bapak Marsono dan Ibu Salyati. Penulis memulai pendidikan formal di SDN Manukan 4 surabaya Kemudian di lanjutkan di SLTPN 3 Surabya. Penulis menempuh jenjang pendidikan selanjutnya di SMAN 5 Surabaya. Pada tahun 2006 penulis mengikuti program Lintas Jalur, dan akhirnya diterima di jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember Surabaya. Dan akhirnya penulis memilih konsentrasi Bidang Studi Elektronika pada Jurusan Teknik Elektro ITS Surabaya sebagai pilihan terbaik. tampilan di LCD Real Error (%) 1,5 1,4 -10 1,5 1,5 0 1,5 1,4 -10 1,5 1,6 10 1,5 1,3 -20 % 100 (%) 2 1 2− × = x x x Error