BAB III
PERANCANGAN SISTEM ALAT
3.1 Pendahuluan
Alat yang dibuat oleh penulis merupakan suatu alat pemindah barang dua aksis yang menggunakan mikroprosesor PIC16F877A sebagai kontrollernya. Dimana penulis menggunakan pemograman yang biasa dipergunakan untuk memprogram PLC yaitu dengan menggunakan software ldmicro yang menggunakan bahasa pemograman berupa ladder diagram. Pemograman tersebut akan dicompile kedalam suatu format berupa file yang berextention *.hex. Setelah dicompile dan dipastikan bahwa program tersebut tidak ada error makan program tersebut akan di donwload ke dalam mikroprosesor.
3.2 Perancangan Model Perangkat Keras
Perangkat keras yang telah dibuat ini tidak memerlukan keakuratan atau perhitungan yang sangat presisi, tetapi juga tidak dibuat secara asal-asalan. Oleh karena itu tanpa menyampingkan profesionalisme karya tulis ini, maka alat ini dibuat dengan pertimbangan yang matang tanpa mengurangi fungsi alat yang semestinya, bahkan fungsinya jadi lebih bervariasi dibanding alat yang ada didunia industri sesungguhnya.
Tentunya perancangan alat ini juga tidak lebih sempurna dengan alat-alat didunia industri yang mempunyai tingkat keakuratan dan biaya material yang tinggi. Oleh karena itu, dilihat dari kepentingan untuk membuat tugas akhir, alat ini hanya digunakan untuk simulasi aplikasi saja.
3.2.1 Diagram Blok Sistem
Sistem aplikasi PLC (Programmable Logic Control) yang diaplikasikan sebagai robot pemindah barang dua aksis ini dirancang menggunakan pusat
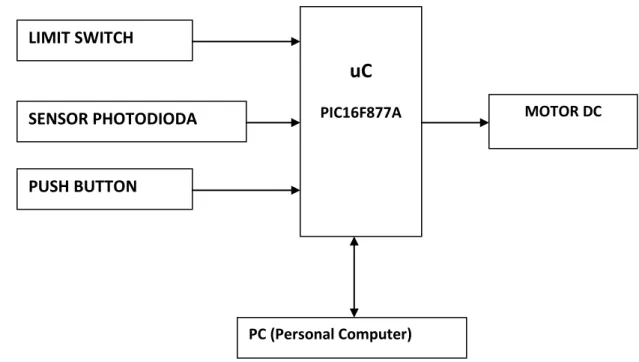
pengontrolan yang bernama mikrokontroller PIC 16F877A. Secara keseluruhan sistem yag ada pada rancangan alat ini dapat dilihat melalui diagram blok yang mewakili piranti-piranti pengendali input dan piranti-piranti output seperti yang direpresentasikan dengan blok-blok diagram dibawah ini :
Gambar 3.1 Diagram Blok Sistem PLC Berbasis Mikrokontroller
Dari diagram blok diatas, dapat dilihat bahwa sistem pada alat ini dapat dikelompokan menjadi beberapa bagian diantaranya :
1. PC
2. Pusat pengendali ”mikro” 3. Bagian Input
4. Bagian output
5. Bagian obyek: benda yg akan dipindahkan
uC
PIC16F877A LIMIT SWITCHSENSOR PHOTODIODA MOTOR DC
PUSH BUTTON
3.2.2 Personal Computer
Personal computer diperlukan pada saat pertama kali alat ini dibuat yaitu saat membuat dan mendownload program untuk system kerja alat. Untuk membuat program digunakaan software ldmicro. Ldmicro merupakan suatu software dimana menggunakan bahasa pemograman yang menggunakan ladder diagram. Program yang dibuat sama dengan program yang ada pada software-software PLC.
3.2.3 Pusat pengendali
Pusat pengendali merupakan inti dari rancangan alat ini yang mengatur tata kerja alat secara keseluruhan. Untuk mengendalikan semua proses dalam rancangan alat ini maka dibutuhkan satu prosessor sederhana.
Rancangan alat ini dibangun dengan mengunakan mikrokontroler PIC 16F877A yang dikeluarkan oleh mikrochip.
Gambar 3.2 Mikrokontroller PIC16F877A
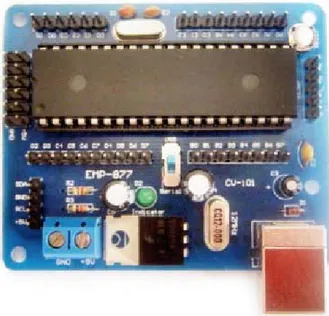
Pada pembuatan alat ini, penulis menggunakan development board berbasis mikrokontroller PIC16F877A antarmuka USB untuk pemogramannya. Alasan pemilihan kit ini yaitu karena komunikasi dari mikrokontroller ke PC atau komputer sudah menggunakan USB tidak seperti kit lainnya yang masih menggunakan port LPT, sehingga dapat mudah sekali untuk penulis dalam proses pemrograman dan bisa menggunakan laptop, yang kita ketahui bahwa laptop keluaran terbaru sudah tidak tersedia port serial maupun LPT.
Alasan penulis memilih mikrokontroller tipe PIC dibanding AVR karena tipe PIC lebih tangguh dan lebih stabil dibandingkan dengan tipe AVR. Memang untuk tipe PIC harganya lebih mahal dibandingkan dengan tipe AVR.
Gambar 3.3 Development Board Berbasis Mikrokontroller PIC16F877A
Dalam pemilihan kit untuk mikrokontroller tidak kalah pentingnya juga kita harus mengetahui spesifikasi dari kit tersebut sehingga akan memudahkan kita dalam merakit sebuah alat yang berbasis mikrokontroller. Berikut spesifikasi dari development board berbasis mikrokontroller PIC16F877A :
• 8K x 14 words program memory, 368 byte SRAM, 256 byte EEPROM, 8ch 10bit ADC, 8-bit timer/counter, 16-but timer/counter, RTC, PWM, TWI, USART, SPI, WDT, analog comparator.
• Internal downloader USB AVR (In-system programming dilengkapi LED programming indicator).
• 33 Jalur input/output (I/O). • Supply tegangan 9VDC. • Terdapat ekstra power 5VDC.
• Tidak membutuhkan power tambahan saat melakukan download program.
Untuk memudahkan dalam pekerjaanya, harus diketahui berapa jumlah masukan dan jumlah keluaran yang diperlukan. Selain itu juga perlu ditentukan komponen mana yang berfungsi sebagai masukan dan komponen mana yang berfungsi sebagai keluaran serta menentukan alamat-alamat yang digunakan sebagai masukan dan keluaran. Setelah data yang diperlukan sudah lengkap maka dalam penyusunan program dapat dengan mudah dilakukan sehingga ladder diagram dari sistem kerja tersebut dapat dibaca secara sempurna.
Pada Mikrokontroller apabila pin diambangkan maka yang terbaca oleh mikrokontroller yaitu logic 1, sehingga pin harus diberikan logic 0.
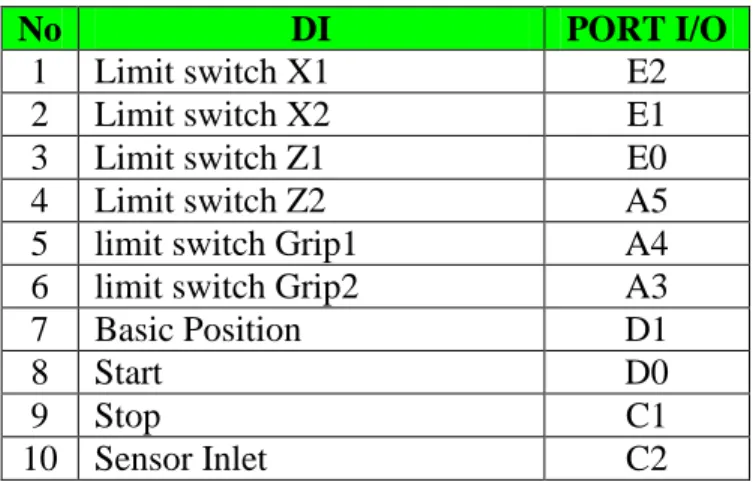
Untuk memperlihatkan alamat dari input dan output yang digunakan serta kegunaanya diperlihatkan pada tabel berikut
Tabel 3.1 Alamat Input
No DI PORT I/O
1 Limit switch X1 E2
2 Limit switch X2 E1
3 Limit switch Z1 E0
4 Limit switch Z2 A5
5 limit switch Grip1 A4
6 limit switch Grip2 A3
7 Basic Position D1
8 Start D0
9 Stop C1
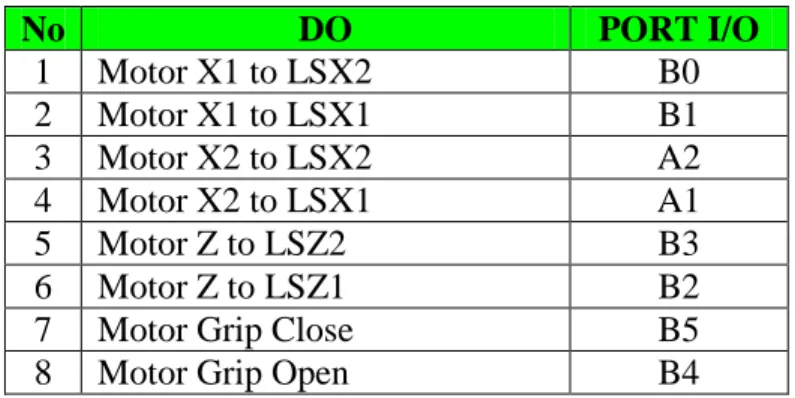
Tabel 3.2 Alamat Output No DO PORT I/O 1 Motor X1 to LSX2 B0 2 Motor X1 to LSX1 B1 3 Motor X2 to LSX2 A2 4 Motor X2 to LSX1 A1 5 Motor Z to LSZ2 B3 6 Motor Z to LSZ1 B2
7 Motor Grip Close B5
8 Motor Grip Open B4
3.2.4 Rangkaian Input
Pada alat ini dibutuhkan input masukan yang akan diolah kedalam kontroller.
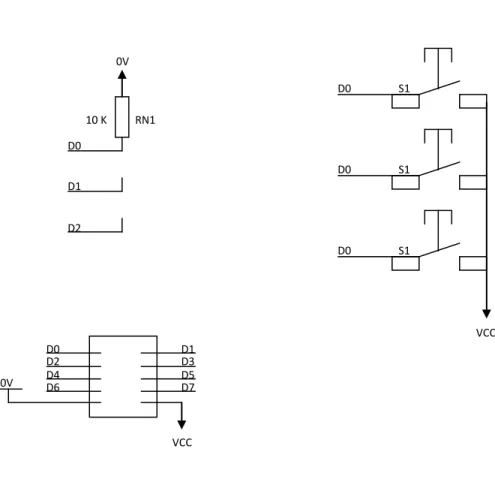
3.2.4.1 Push Button
Swich Push Button adalah salkar tekan yang berfungsi untuk menghubungkan atau memisahkan bagian – bagian dari suatu instalasi listrik satu sama lain. Push button memiliki kontak NC (normally close) dan NO (normally open), yang mana bentuk fisik jenis push button dapat dilihat pada gambar berikut ini :
Gambar 3.4 Push Button
Prinsip kerja Push Button adalah apabila dalam keadaan normal tidak ditekan maka kontak tidak berubah, apabila ditekan maka kontak NC
(normally close) akan berubah fungsi menjadi NO (normally open) dan sebaliknya kontak NO (normally open) akan berubah fungsi menjadi NC (normally close).
Gambar 3.5 Rangkaian Wiring Push Button
3.2.4.2 Limit Switch
Limit Switch adalah sensor peraba yang bersifat mekanis dan mendeteksi sesuatu setelah terjadi kontak fisik. Penggunaan sensor ini biasanya digunakan untuk membatasi gerakan maksimum sebuah mekanik. Contohnya pada penggerak lengan di mana limit switch akan aktif dan memberikan masukan pada CPU untuk menghentikan gerak
D0 D1 D2 RN1 10 K 0V D0 S1 D0 S1 D0 S1 VCC D0 D2 D4 D6 D1 D3 D5 D7 0V VCC
motor di saat lengan sudah ditarik maksimum. Sensor ini juga seringkali digunakan untuk sensor cadangan bilamana sensor yang lain tidak berfungsi. Contohnya pada bagian pinggir dari sebuah robot, pada saat sensor infrared gagal berfungsi untuk mendeteksi adanya halangan, maka limit switch akan mendeteksi dan memerintahkan motor untuk berhenti saat terjadi kontak fisik.
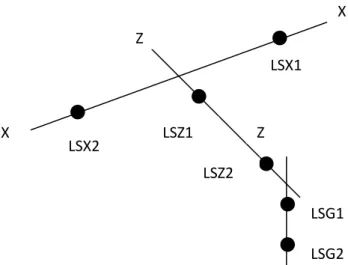
Kegunaan limit switch pada alat ini yaitu sebagai pembatas atas posisi robot, sehingga robot tidak bergerak melampaui batas yang sudah ditentukan. Juga digunakan sebagai system interlock pada robot.
Gambar 3.6 Posisi Limit Switch
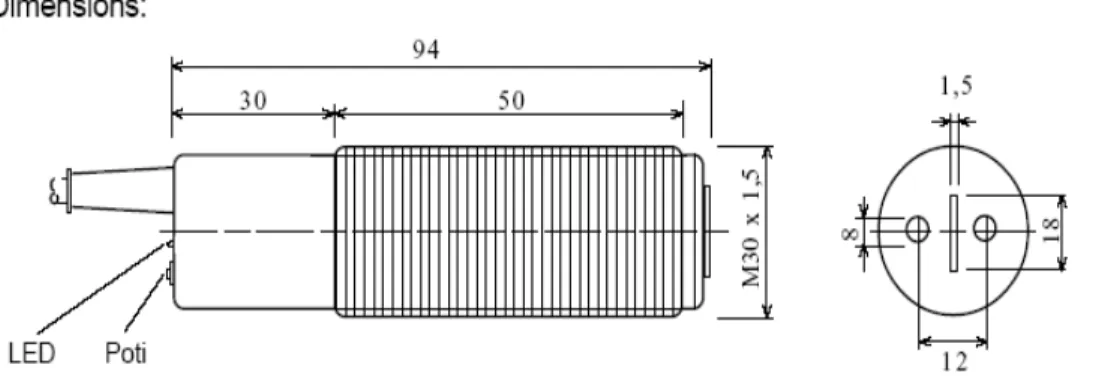
3.2.4.3 Optoelectronic Proximity Switches
Sensor optoelectronic proximity switch didesain sebagai sumber sekaligus switching untuk digunakan dengan segala macam fibre-optic leads.
Keunggulan dari fibre-optic leads :
- Dapat beroperasi pada temperatung yang tinggi, bisa mencapai 200 LSX2 LSX1 LSZ1 LSZ2 LSG1 LSG2 X X Z Z
derajat
- Bisa mendeteksi dan membaca benda yang kecil - Bisa diaplikasikan pada tempat yang sempit atau kecil
Gallium-arsenic LED memancarkan cahaya infrared. Sebuah phototransistor menerima cerminan dari cahaya infrared dan merubahnya kedalam pulsa electric.
Gambar 3.7 Dimensi Optoelectronic Proximity Switches
Gambar diatas merupakan bentuk dari sensor Optoelectronic Proximity Switches. Terdapat indikator led pada bagian belakang dan potensiometer untuk menseting sensitifitas.
Gambar 3.8 Pemasangan Sensor Optoelectronic Proximity Switches
Gambar diatas merupakan gambar untuk pemasangan sensor Optoelectronic Proximity Switches, dimana kedua ujung sensor dipasang berhadapan seperti pada gambar diatas. Nanti benda kerja akan
ditempatkan di tengah-tengah sensor tersebut sehingga akan mengaktifkan sensor.
Gambar 3.9 Wiring Optoelectronic Proximity Switches
Gambar diatas merupakan gambar wiring dari Optoelectronic Proximity Switches. Dimana kabel warna hitam merupakan kabel output yang nantinya dihubungkan dengan relay untuk memberikan sinyal ke mikrokontroller.
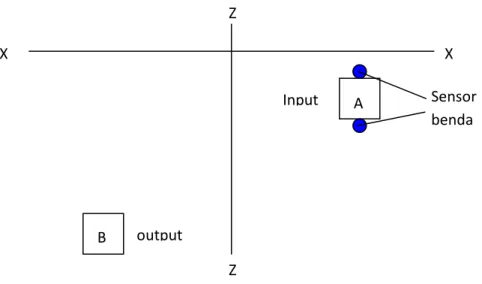
Sensor ini dipergunakan sebagai pendeteksi benda kerja bisa dibilang sebagai sensor posisi benda pada line input benda kerja.
Gambar 3.10 Posisi Sensor Benda
X X Z Z Sensor benda Input output A B
3.2.5 Rangkaian Output
Pada rangkaian robot pemindah barang ini output atau keluaran dari mikrokontroller yaitu 5 VDC dan mempunyai arus sebesar 25 mA pada setiap jalur pinnya, sehingga membutuhkan rangkaian lagi untuk bisa menggerakkan equipment yang akan digunakan seperti motor DC yang digerakan oleh relay yang mendapat perintah dari mikrokontroller.
3.2.5.1 Relay
Relay elektromekanis digunakan sebagai alat penghubung pada rangkaian dan pada beberapa aplikasi pada industri dan kontrol proses memerlukan relay sebagai elemen kontrol penting.
Syarat-syarat sebuah relay :
• Dapat diandalkan • Bekerja dengan cepat • Selektif
• Ekonomis Prinsip Kerja
Relay pengendali elektromekanis adalah saklar magnetis. Relay ini menghubungkan rangkaian beban on dan off dengan pemberian energi elektro magnetis yang membuka dan menutup pada rangkaian.
Relay biasanya mempunyai satu kumparan, tetapi relay dapat mempunyai beberapa kontak. Bentuk fisik relay dapat dilihat pada gambar berikut :
Gambar 3.11 Relay
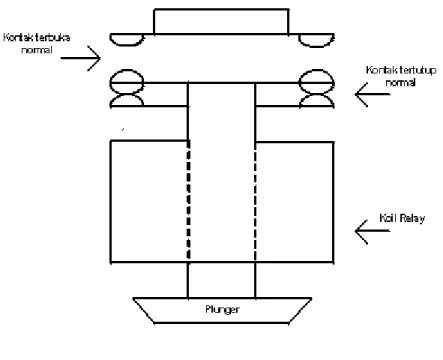
Relay elektromekanis berisi kontak diam dan kontak bergerak. Kontak yang bergerak dipasangkan pada plunger. Kontak ditunjuk sebagai Normally Open ( NO ) dan Normally Close( NC ). Apabila kumparan diberi tenaga, terjadi medan elektromagnetis. Aksi dari medan pada gilirannya menyebabkan plunger bergerak pada kumparan menutup kontak NO dan membuka kontak NC. Kontruksi relay jenis ini diperlihatkan pada gambar berikut :
Gambar 3.12 Konstruksi Relay
Kontak NO akan membuka ketika tidak ada arus mengalir pada kumparan, tetapi tertutup secepatnya setelah kumparan menghantarkan arus atau diberi tenaga. Kontak NC akan tertutup apabila tidak diberi daya dan membuka ketika kumparan diberi daya.symbol relay NO dan NC dapat dilihat pada gambar dibawah ini :
Gambar 3.13 Simbol Relay
Level tegangan pada kumparan relay yang diberi tegangan, menyebabkan penghubungan kontak yang disebut tegangan pick up ( tegangan tarik ). Setelah relay diberi energi, level tegangan pada
kumparan relay dimana kontak kembali pada kondisi tidak dioperasikan disebut tegangan drop out ( tegangan lepas ). Kumparan relay dirancang untuk tidak lepas sampai penurunan tegangan pada penurunan tegangan minimum sekitar 85 % dari tegangan kerja. Kumparan relay juga tidak akan menarik (memberi energi ) sampai tegangan meningkat pada 85 % tegangan kerja, tanpa merusakan kumparan. Kumparan relay sekarang dibuat dari konstruksi cetakan. Hal ini membantu mengurangi penyerapan kelembaban dan meningkatkan kekuatan mekanis.
Pada limit switch merupakan sensor input masukan yang memberikan logic 1 & 0. Logic 1 mempunyai tegangan 5 VDC & logic 0 mempunyai tegangan 0 VDC. Seperti dikatakan pada halaman sebelumnya bahwa mikroprosesor apabila pinnya diambangkan maka akan berlogic 1 sehinga diperlukan rangkaian seperti dibawah ini.
D1 IN4001 C 828 R1 R1 1Kohm 5VDC 12VDC
To PLC
C 828 5VDCPada output mikrokontroller menghasilkan tegangan 5 VDC dan hal ini tidak memungkinkan untuk menggerakan motor sebagai penggerak robot dikarekan arus yang dihasilkan sangat kecil sekali oleh mikrokontroller, sehingga diperlukan rangkaian tambahan seperti gambar di bawah ini.
D1 IN4001 C 828 C 828 R1 R1 1Kohm pin uC 12VDC 12VDC D1 IN4001 C 828 C 828 R1 R1 1Kohm pin uC 12VDC 12VDC
Motor
+
-Gambar 3.15 Rangkaian Kontrol Relay Untuk Motor
Sama halnya dengan limit switch, sensor benda juga memerlukan rangakain tambahan. Berikut rangkain tersebut.
R1
To PLC
5VDC Sensor 12VDC+
-Sinyal OutGambar 3.16 Rangakain Kontrol Relay Untuk Sensor
3.2.5.2 Motor 12VDC
Motor 12 VDC ini diperlukan sebagai penggerak untuk meggerakan robot ke arah X, Y dan untuk proses memegang dan melepaskan benda yang akan dipindahkan.
Gambar 3.17 Motor DC
Pada arah X diperlukan 2 buah motor dikarenakan apabila hanya menggunakan 1 motor saja, motor tidak kuat untuk menggerakan beban sehingga diperlukan 2 buah motor.
Gambar 3.18 Posisi Motor
3.2.6 Power Supply
Pada alat ini dibutuhkan sumber tegangan untuk menjalankan system ini. Alat ini membutuhkan beberapa sumber tegangan yang berbeda yaitu :
Tabel 3.3 Kegunaan Power Supply
No Kegunaan Tegangan 1 I/O Mikrokontroller 5 VDC 2 Power Mikrokontroller 9 VDC 3 Power Relay 12 VDC 4 Power Motor 12 VDC 5 Power Sensor 12 VDC
Untuk sumber tegangan 5 VDC sudah tersedia pada mikrokontroller sehingga penulis tidak perlu menyediakan power tersendiri.
MX2 MX1 MX MG X X Z Z
Gambar 3.19 Rangkain Power Supply
Gambar diatas merupakan salah satu rangkain power supply 12 VDC, untuk rangkaian power supply yang lain hampir sama tetapi perbedaanya hanya pada IC (U1) yaitu apabila menggunakan tegangan 9VDC menggunakan IC 7809. Fungsi led hanya sebagai indikator apabila led manyala maka power supply sedang kondisi ON dan sebaliknya apabila led tidak menyala maka kondisi power supply pada kondisi off.
3.2.7 Obyek System
Pada alat ini proses yang akan dipindahkan yaitu berupa benda yang berada pada posisi input atau A dan akan berpindah ke posisi output atau B. Untuk melakukan proses pemindahan diperlukan beberapa tahap diantaranya ; 1. Apabila posisi lengan robot tidak berada pada posisi input atau A dimana
benda akan masuk maka hal yang harus dilakukan adalah menekan tombol basic position, yaitu pada tombol Bit 0. maka lengan robot akan berada pada posisi yang sudah ditentukan.
2. Robot tidak akan bisa bekerja apabila tidak ditekan tombol basic position terlebih dahulu.
3. Apabila lengan robot sudah berada pada posisi basic position maka artinya roboot sudah siap untuk dijalankan.
4. Apabila kita menekan tombol start pada tombol Bit 1 maka robot akan berada pada posisi standby menunggu benda kerja ditempatkan pada posisi yang sudah disediakan dan sensor akan mendeteksi keberadaan benda tersebut.
5. Apabila benda sudah berada di posisinya maka lengan robot akan menjepit benda kerja tersebut.
6. Kemudian lengan robot akan bergerak ke arah X2 sampai LSX2 terpenuhi dan lengan berhenti.
7. Kemudia lengan akan bergerak maju kearah Z2 sampai LSZ2 terpenuhi dan lengan berhenti.
8. Kemudiann objek atau benda kerja akan direlease oleh grip robot.
9. Setelah direlease lengan akan kembali ke posisi Z1 sampai LSZ1 terpenuhi kemudian berhenti.
10. Setelah itu lengan kembali bergerak kearah X1 sampai LSX1 terpenuhi kemudian behenti.
11. Robot akan bekerja terus menerus.
12. Apabila tombol stop pada tombol Bit 2 ditekan maka robot akan berhenti bekerja.
3.3 Perancangan Perangkat Lunak
Perangkat lunak yang digunakan untuk menunjang kelancaran tugas akhir ini adalah menggunakan program LDmicro 2.1 yang merupakan versi terbaru dan sudah bisa komunkasi melalui port usb. LDmicro 2.1 merupakan bentuk program yang kompatible untuk plc yang dibuat oleh ladder diagram yang didalamnya terdapat instruksi-instruksi untuk memudahkan dalam pelaksanaan penginputan program yang nantinya program akan dicompile ke dalam format *.HEX, sehingga bisa di download kedalam mikrokontroller. Dengan alasan tersebut maka Ldmicro 2.1
digunakan penulis untuk membantu menyelesaikan program yang akan digunakan pada alat simulasi ini.
3.3.1 Proses Awal Pemrograman
Pada saat kita akan melakukan proses pemrograman dengan menggunakan LDmicro 2.1. Hal yang harus kita lakukan untuk pertama kali yaitu mensetting PLC configuration.
Gambar 3.22 PLC Configuration
Untuk crystal frequency (MHz) disesuaikan dengan frequensi kristal mikrokontroller. Untuk cycle time bisa disesuaikan dengan keinginan kita.
Gambar 3.23 Memilih Tipe Mikrokontroller
Setelah melakukan setting crystal frequency, hal yang harus dilakukan yaitu memilih tipe mikrokontroller yang akan dipergunakan. Dalam hal ini kita memilih microchip PIC16F877 40-PDIP.
Gambar 3.24 Pemilihan Instruksi
Hal yang selanjutnya dilakukan adalah membuat program dengan cara memilih instruksi-instruksi yang sesuai dengan keinginan kita.
Gambar 3.25 Pemilihan Pin-Pin I/O Mikrokontroller
Apabila program sudah selesai dibuat maka hal yang harus dilakukan yaitu memilih pin I/O pada mikrokontroller. Dengan cara mengklik DI/DO yang tersedia kemudian tinggal memilih pin yang tersedia dan masih kosong belum dipergunakan.
Gambar 3.26 Cara Mengcompile Program
Setelah pemilihan pin-pin I/O untuk mikrokontroller hal yang selanjutnya dilakukan adalan mengcompile program dari ladder diagram ke dalam file *.HEX. Dengan begitu program sudh siap untuk di load kedalam mikrokontroller.
Gambar 3.27 Cara Mendownload Program
Setelah semuanya selesai maka kita tinggal mendownload program. Caranya yaitu instal terlebih dahulu driver untuk USB mikrokontroller. Setelah itu port & baudrate harus sesuai. Tekan tombol search atau F2 untuk memilih file *.Hex yang akan di download ke dalam mikrokontroller. Klik tombol write atau F4, kemudian tekan tombol reset pada mikrokontroller (apabila pada field info muncul pesan searching for bootloader). Proses download akan aktif dalam 0,2 detik.
3.3.2 Flowchart
untuk memperjelas ladder diagram diatas pada penulisaan tugas akhir ini disertakan juga bentuk flowchart secara keseluruhan untuk mempermudah dalam memahami cara kerja ladder diagram.
INITIATION
Apakah Berada Pada Posisi Basic Position
GRIP CLOSE START
Aksis X Bergerak Ke Arah X2
Aksis Z Bergerak Ke Arah Z2
GRIP OPEN
Aksis Z Bergerak Ke Arah Z1
Aksis X Bergerak Ke Arah X1
STOP Ya Ya F A Tempatkan Benda Kerja Pada Jalur
Inlet Tidak E
E
SELESAI Benda Kerja Berada
Gambar 3.28 Flow Chart
GRIP OPEN
Basic Position Cek Wiring, Relay,
I/O, Motor, Mechanical A B C D F Aksis Z Bergerak Ke Arah Z1 Aksis X Bergerak Ke Arah X1 B C D
3.4 Ladder Diagram
Ladder diagram menggambarkan program dalam bentuk grafik. Diagram ini dikembangkan dari kontak-kontak relay yang terstruktur yang menggambarkan aliran arus listrik. Dalam diagram ladder terdapat dua buah garis vertical dimana garis vertical sebelah kiri dihubungkan dengan sumber tegangan positif catu daya dan garis sebelah kanan dihubungkan dengan sumber tegangan negatif catu daya.
Program ladder ditulis menggunakan bentuk pictorial atau simbol yang secara umum mirip dengan rangkaian kontrol relay. Program ditampilkan pada layar dengan elemen-elemen seperti normally open contact, normally closed contact, timer,
counter, sequencer dll ditampilkan seperti dalam bentuk pictorial.
Dibawah kondisi yang benar, listrik dapat mengalir dari rel sebelah kiri ke rel sebelah kanan, jalur rel seperti ini disebut sebagai ladder line (garis tangga). Peraturan secara umum di dalam menggambarkan program ladder diagram adalah
• Daya mengalir dari rel kiri ke rel kanan
• Output koil tidak boleh dihubungkan secara langsung di rel sebelah kiri.
• Tidak ada kontak yang diletakkan disebelah kanan output coil • Hanya diperbolehkan satu output koil pada ladder line. Dengan diagram ladder, gambar diatas direpresantisakan menjadi
Gambar 3.29 Diagram Ladder
Diantar dua garis ini dipasang kontak-kontak yang menggambarkan kontrol dari switch, sensor atau output. Satu baris dari diagram disebut dengan satu rung. Input menggunakan symbol [ ] (kontak normally open) dan [/] (kontak normally close). Output mempunyai symbol ( ) yang terletak paling kanan.
Untuk memperlihatkan hubungan antara satu rangkaian fisik dengan ladder diagram yang mempresentasikannya, lihatlah rangkaian motor listrik pada gambar dibawah ini.
Motor dihubungkan ke sumber daya melalui 3 saklar yang dirangkai secara seri ditambah saklar over load sebagai pengaman. Motor akan menyala bila seluruh saklar dalam kondisi menutup.
Gambar 3.30 Rangkaian Start - Stop Motor
Kesimpulan :
• Ladder diagram tersusun dari dua garis vertical yang mewakili rel daya
• Diantara garis vertikal tersebut disusun garis horizontal yang disebut rung (anak tangga) yang berfungsi untukmenempatkan komponen kontrol sistem.
Berikut ini contoh ladder diagram rangkaian latching. Rangkaian laching biasa juga disebut sebagai rangkaian pengunci. Maksudnya adalah rangkaian yang bersifat mengingat kondisi sebelumnya dalam kontrol logic. Pada rangkaian ini hasil keluaran dikunci (latching) dengan menggunakan kontak hasil keluaran itu sendiri, sehingga walaupun input sudah berubah, kondisi output tetap.