Model Otomasi Penyortir Warna Barang
dengan Metode Thresholding dan Bentuk
Barang dengan Metode Pengenalan Pola
Muliady dan Bryan Alexander
Jurusan Teknik Elektro, Universitas Kristen Maranatha, Bandung Jl. Suria Sumantri 65, Bandung 40164, Indonesia
[email protected], [email protected]
Abstrak: Model adalah replika sistem yang dapat merepresentasikan sistem sebenarnya. Tidak hanya digunakan untuk proses pembelajaran, model juga diperlukan untuk simulasi dan analisis dalam rangka perancangan suatu sistem produksi di industri. Pada penelitian ini, dibuat suatu model otomasi sistem sortir barang berdasarkan warna dan bentuknya. Dengan citra (bitmap) yang ditangkap webcam saat barang yang masuk terdeteksi sensor proximity, program Flowstone dalam komputer akan mendeteksi warnanya dengan metoda thresholding dalam parameter HSV, kemudian mengenali bentuknya dengan metoda pengenalan pola yaitu dengan mengecek tiap pixel pada seluruh sisi/tepi bentuk yang diinginkan serta mengecek panjang & lebar atau diameter objek dari citra yang didapat, dan selanjutnya mengirimkan sinyal kontrol ke mikrokontroler ATmega16 untuk mengendalikan aktuator motor servo sehingga barang tersebut dapat diarahkan ke tempat yang sesuai dengan hasil identifikasi. Dari hasil pengamatan data, error pendeteksian warna merah, hijau dan biru masing–masing sebesar 8,33%, 4,17% dan 16,67%. Bentuk persegi panjang dikenali dalam rentang panjang 7,9cm – 8,4cm, sementara bentuk lingkaran dikenali dalam rentang diameter 3cm – 3,4cm. Bentuk jajar genjang, trapesium, dan segitiga dapat dikenali sebagai bentuk bukan persegi panjang dan lingkaran.
Kata kunci: Konveyor, Flowstone, Metode Thresholding, Metode Pengenalan Pola.
Abstract: Model is a replication of a system that can represent the actual system. Not only used
for learning process, a model is needed for simulation and analysis in order to design a production system in industry. In this research, it is designed an automation model of objects sorter system based-on its color and shape. Using image data (bitmap) that captured by webcam, Flowstone program in a computer will detect the color using thresholding method in HSV parameter, then recognize the shape using pattern recognition method by check every pixel on the whole edge of the desire shape, also check the object length & width or diameter of the image, and next, send control signal to ATmega16 microcontroller to control servo motor actuator so the object can be directed to the appropriate place with the result of identification. From the results of data observation, the percentage of error in detecting the red, green and blue color each one is 8.33%, 4.17% and 16.67%. For rectangular objects can be recognized with length in range of 7.9cm to 8.4cm, while for circular objects can be recognized
ISSN 1979-2867 (print) Electrical Engineering Journal Vol. 5 (2014) No. 1, pp. 12-31
with diameter in range of 3cm to 3.4cm. Parallelogram, trapezoid, and triangle can be recognized as a shape of not rectangular and not circular
Keywords: Conveyor, Flowstone, Thresholding Method, Pattern Recognition Method
I. PENDAHULUAN
Perindustrian merupakan salah satu sektor yang sangat berpengaruh dalam tingkat kesejahteraan dalam suatu negara, karena itu perlu untuk mengembangkan sistem–sistem yang membangun keseluruhan proses produksi dalam industri–industri. Tentu saja, proses pembelajaran serta uji coba merupakan hal yang diperlukan untuk dapat mengembangkan sistem–sistem tersebut. Sayangnya, kegagalan atau error yang terjadi adalah hal yang sulit dihindari dalam proses tersebut. Sedangkan dalam proses produksi di industri, tentunya tidak diinginkan terjadi banyak kegagalan atau error yang dapat merugikan perusahaan. Maka dari itu diperlukan suatu model yang dapat merepresentasikan suatu sistem yang sebenarnya, supaya dapat dipakai untuk proses pembelajaran serta uji coba yang tidak boleh dilakukan pada sistem sebenarnya dalam industri.
Kasus penyotiran barang dalam proses produksi sering menjadi suatu topik yang banyak dibahas pada bagian pemantau mutu produksi. Pada penelitian ini, akan dibahas masalah penyortiran barang berdasarkan warna dan bentuk. Model yang direalisasi dapat berguna untuk proses pembelajaran serta simulasi.
II. METODE PENELITIAN
Flowstone merupakan bahasa pemrograman Graphical, tanpa coding, sehingga sangat memudahkan penggunanya terutama pengguna yang tidak menyukai coding. Flowstone dapat digunakan untuk membuat aplikasi pengolahan sinyal digital secara real time, robotika, mekatronika, HMI, SCADA, audio analisis, dan lain–lain.[1]
Secara konsep, Flowstone sangatlah sederhana. Software ini sudah menyediakan beberapa komponen yang langsung dapat digunakan. Setiap komponen memiliki fungsi yang berbeda. Sebuah komponen dapat mengambil data yang masuk, memproses data tersebut, serta mengeluarkan data tersebut menjadi sebuah output. Sebuah komponen memiliki input atau
output atau keduanya. Beberapa komponen yang sudah tersedia pada Flowstone dapat
digabungkan dan dibuat ke dalam sebuah modul yang fungsinya dapat disesuaikan dengan kebutuhan.
Program library Flowstone memiliki lebih dari 436 komponen (dalam toolbox) yang mempunyai fungsi khusus, dan beberapa diantaranya merupakan modul yang dibangun dari beberapa komponen dasar untuk melakukan fungsi tertentu. Komponen – komponen ini dapat digunakan untuk melakukan perhitungan matematika, mendeteksi wajah, melacak objek bergerak, mendeteksi warna, menampilkan GUI dan masih banyak lagi.[2] Berikut ini adalah beberapa metoda pemrosesan citra yang digunakan pada penelitian ini menggunakan Flowstone.
II.1. Konversi RGB ke HSV
RGB adalah suatu model warna yang terdiri dari 3 buah warna, yaitu merah, hijau, dan biru, yang ditambahkan untuk menghasilkan bermacam-macam warna, ketiga berkas cahaya ditambahkan bersama-sama, dengan menambahkan panjang gelombang untuk membuat
spekt diliha ketig adala 1 2 3 G berik yaitu RGB dalam trum warna at pada Gamb HSV meru a parameter ah: . Hue. Me untuk me 2. Saturatio warna, ya 3. Value. M 0, maka w akan mun Gambar 1. Rep komp Konversi m kut [3]: Cmax = m Cmin = m Δ = Cmax Keterang Konversi m Int to Color suatu warn m Flowstone akhir. Gamb bar 1. upakan kepe HSV dapat enyatakan w enentukan ke on. Terkadan aitu mengind Menyatakan k warna akan ncul variasi-v presentasi pena ponen warna R model warna max(R,G,B) min(R,G,B) x–Cmin 60° 60° 60° an: nilai nilai model warna r dilanjutkan na ke dalam adalah seper bar represent endekan dar dilihat pada warna sebena emerahan, ke ng sering di dikasikan seb kecerahan da menjadi gela variasi baru d ambahan ketig RGB a RGB ke H , 2 , 4 , 0 , 255 , R, G, B adal H dalam ren a pada Flow Color to HS nilai HSV rti ditunjukk tasi penamba ri Hue, Satu a Gambar 2 arnya, sepert ehijauan, dan isebut chrom berapa banya ari warna. Ni ap, semakin dari warna te ga SV dapat di Δ 0 lah dalam ren ntang 0 - 360 wstone dapat SV [4]. Dua ko dari warna kan Gambar 3 ahan ketiga uration, dan . Karakterist ti merah, vi n sebagainya ma, menyata ak warna puti ilainya berki besar nilai m ersebut. Gambar 2. ilakukan den ntang 0 - 255 , S & V dala t dilakukan omponen ter tersebut. Pe 3. komponen w Value. Gam tik pokok da iolet, dan ku dari cahaya. akan tingkat ih diberikan isar 0-100% maka akan s Representasi ngan menggu 5 am rentang 0 dengan dua sebut akan m enggunaan k warna RGB mbar repres ari warna ter
uning. Digu . kemurnian pada warna. . Apabila ni semakin cera warna HSV unakan persa - 255 a komponen mengkonvers omponen ter dapat sentasi rsebut unakan suatu lainya ah dan amaan (1) (2) (3) (4) (5) (6) dasar si nilai rsebut
Gambar 3. Konversi RGB ke HSV dalam Flowstone [4] Penjelasan:
I2C (Int to Colour): membuat suatu warna dengan spesifikasi nilai - nilai parameter RGB (0-255) yang dimasukkan. [4]
C2HS (Colour to HSV): mengeluarkan nilai – nilai parameter Hue (0-360), Saturation (0-255), Value (0-255) dari suatu warna yang dimasukkan [4].
II.2. Metoda Thresholding
Thresholding adalah metoda yang paling sederhana untuk melakukan segmentasi citra.
Contoh aplikasinya adalah memisahkan suatu daerah dari suatu gambar sesuai dengan objek yang ingin dianalisis. Pemisahan ini didasarkan pada variasi intensitas antara pixel objek dan
pixel objek lainnya. Untuk membedakan pixel-pixel yang akan dianalisa, dilakukanlah suatu
perbandingan dari setiap nilai intensitas pixel menurut nilai ambang yang telah ditentukan. Setelah dipisahkan antara pixel penting dan pixel yang akan dibuang, maka diaturlah nilai pixel tersebut menjadi nilai 0 (hitam) untuk pixel yang akan di buang, dan 255 (putih) untuk pixel yang akan dianalisa. Persamaan umum proses thresholding dapat dilihat pada Persamaan 7.[5]
, 0 1 ,, ,,
(7)
Contoh gambar hasil proses thresholding dapat dilihat pada Gambar 4.
Gambar 4. Contoh gambar asli (kiri) dan hasil thresholding (kanan)
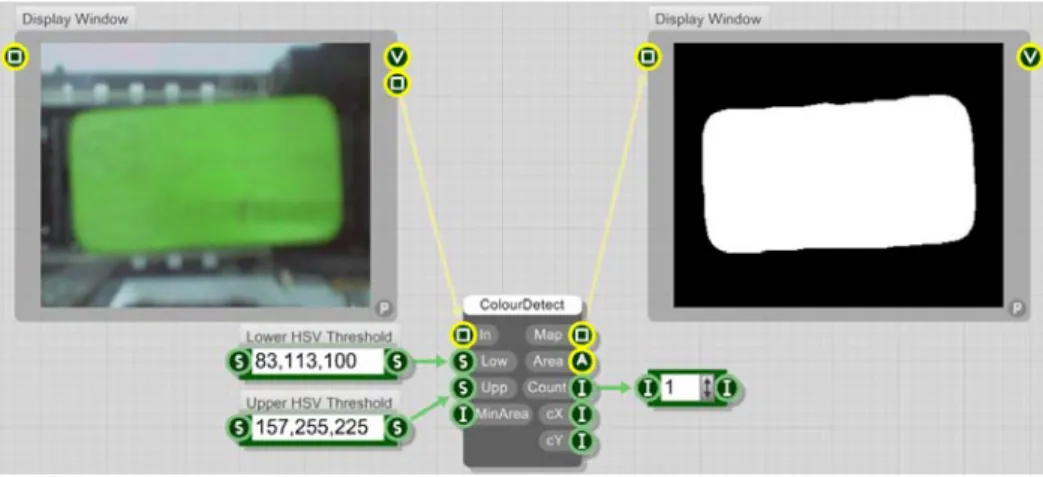
Pada pemrograman Flowstone, proses thresholding gambar seperti contoh Gambar 4 dapat dilakukan dengan menggunakan komponen Color Detect. Penggunaan komponen tersebut dalam Flowstone adalah seperti Gambar 5.
Gambar 5. Penggunaan komponen Colour Detect dalam Flowstone
Color Detect berfungsi menemukan obyek dengan warna tertentu dalam gambar.
Komponen ini menggunakan 2 buah threshold (batas ambang) yaitu lower threshold dan upper
threshold, sehingga dapat memisahkan pixel yang hanya berada pada daerah di antara lower threshold dan upper threshold dari parameter Hue (0-360), Saturation (0-255), Value (0-255)
warna yang diinginkan[4]. Persamaan umum proses thresholding pada modul color detect ini dapat dilihat pada Persamaan 8[5].
, 0 1 ,, , , ,
(8)
Selain memberikan output gambar (hitam – putih) seperti pada Gambar 5, juga dihasilkan spesifikasi warna, luas, dan koordinat titik tengah area warna terbesar yang terdeteksi.
III. METODOLOGI PENELITIAN
III.1. Perancangan dan Realisasi Perangkat Keras
Perancangan model otomasi sistem sortir barang yang dibuat dalam penelitian ini dapat dilihat pada Gambar 6. Dengan bagian-bagian utama berupa motor servo continuous untuk menggerakkan konveyor, tiga buah motor servo untuk mengarahkan barang yang disortir, photo
diode untuk mengetahui posisi barang berada di depan webcam, mikrokontroler ATmega16
sebagai perangkat interfacing antara komputer dengan sensor dan aktuator.
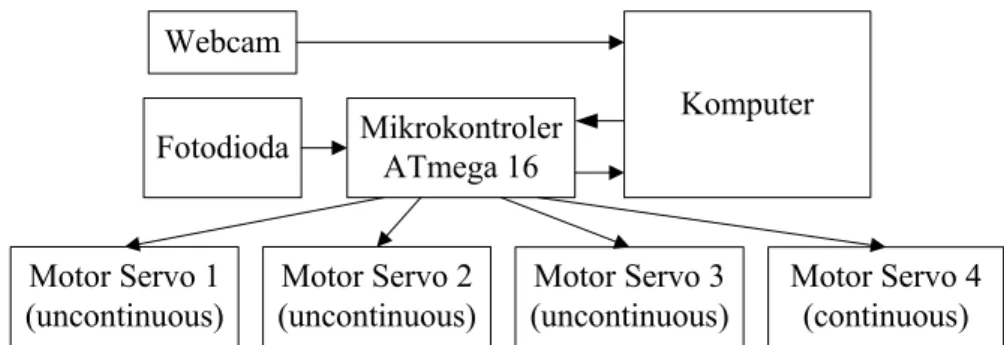
Rancangan perangkat keras dalam diagram blok ditunjukkan pada Gambar 7. Kamera web dihubungkan ke komputer untuk memberikan informasi citra yang diambil selama sistem berjalan. Fotodioda sebagai sensor proximity berfungsi memberi tanda kepada program Flowstone di dalam komputer untuk mengambil citra barang yang sedang melintas di hadapan kamera web untuk diidentifikasi warna dan bentuknya. Citra yang telah ditangkap tersebut diidentifikasi warna dan bentuknya dalam program Flowstone, kemudian akan mengirimkan perintah kendali kepada mikrokontroler ATmega16 yang mengendalikan posisi motor servo, sehingga barang dapat disortir ke tempat yang sesuai dengan hasil identifikasi.
Webcam Fotodioda Mikrokontroler ATmega 16 Komputer Motor Servo 1 (uncontinuous) Motor Servo 2 (uncontinuous) Motor Servo 3 (uncontinuous) Motor Servo 4 (continuous)
Gambar 7. Diagram blok sistem sortir barang berdasarkan warna dan bentuknya
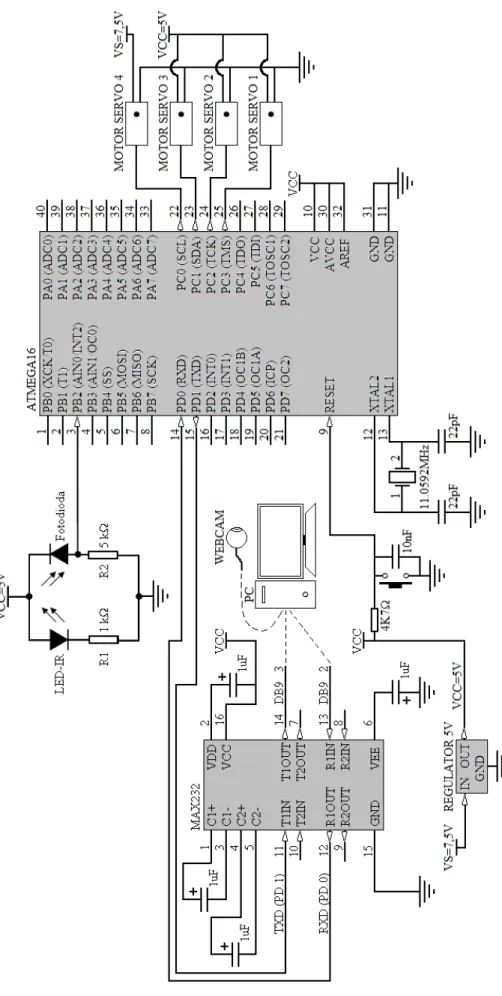
Untuk itu, maka perancangan dan realisasi perangkat keras yang diperlukan dalam penelitian ini meliputi konveyor, kamera web dan sensor proximity, aktuator motor servo (dapat dilihat pada Gambar 8), serta s
kema rangkaian elektronika keseluruhan sistem yang dibuat
dapat dilihat pada
Gambar 9.III.2. Perancangan dan Realisasi Perangkat Lunak
Pengendalian seluruh sistem sortir barang berdasarkan warna dan bentuk dibutuhkan program pendukung pada mikrokontroler ATmega16 dan program utama pada Flowstone. Program pendukung pada mikrokontroler ATmega16 akan melakukan inisialisasi terlebih dahulu, kemudian mengaktifkan fasilitas interrupt supaya setiap program interrupt yang digunakan di luar main program seperti interrupt eksternal, Rx interrupt dan timer interrupt dapat berjalan terus. Flowchart program utama pada mikrokontroler ATmega16 dapat dilihat pada Gambar 10. Program interrupt eksternal digunakan untuk menerima sinyal falling edge dari fotodioda setiap kali ada barang yang melewati fotodioda, kemudian mengirimkan data kepada program Flowstone sebagai trigger untuk mengambil citra serta proses identifikasi warna dan bentuk dari barang yang tengah melintas tersebut. Program Flowstone akan mengirimkan sinyal kontrol (data T_on) ke mikrokontroler ATmega16 untuk mengendalikan posisi tiap servo, dan program Rx interrupt digunakan untuk menerima data tipe char dari Flowstone menggunakan komunikasi serial USART sehingga dapat dikenali sebagai informasi T_on (tipe int) untuk mengatur T_on sinyal PWM yang harus diberikan kepada setiap motor servo. Selanjutnya, program timer interrupt digunakan untuk menghasilkan sinyal PWM sesuai informasi T_on (tipe int) yang diperoleh bagi masing – masing motor servo.
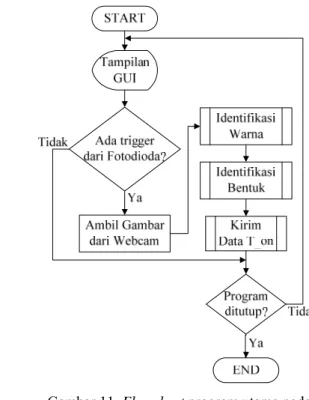
Pada penelitian ini, program utama sistem dibuat di dalam software Flowstone. Program utama ini harus dapat menampilkan GUI video dari kamera web setiap waktu, dan yang terutama adalah harus dapat mengidentifikasi warna dan bentuk objek dari citra yang tertangkap oleh kamera web, kemudian mengendalikan tiap motor servo supaya barang dapat diarahkan ke tempat yang sesuai dengan hasil identifikasi tersebut. Flowchart program utama sistem ini dapat dilihat pada Gambar 11.
Gambar 10. Flowchart program utama pada mikrokontroler ATmega16
Gambar 11. Flowchart program utama pada Flowstone
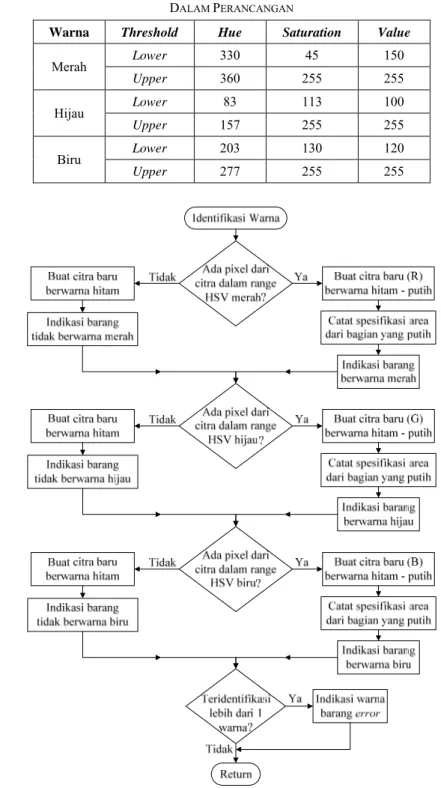
Identifikasi warna pada Flowstone menggunakan modul colour detect dengan metoda
thresholding. Modul ini menggunakan lower threshold dan upper threshold dari parameter HSV
warna yang diinginkan. Lower threshold dan upper threshold dari parameter HSV warna merah, hijau & biru yang digunakan dapat dilihat pada Tabel 1. Dengan menggunakan modul colour
detect, setiap pixel dari citra akan diubah menjadi hitam – putih, hitam untuk pixel yang berada
di luar rentang HSV warna yang diinginkan dan putih untuk pixel yang berada pada rentang HSV yang diinginkan. Flowchart subprogram identifikasi warna terdapat pada Gambar 12.
TABEL 1.PARAMETER UPPER &LOWER THRESHOLD HSV DARI WARNA MERAH,HIJAU, DAN BIRU YANG DIGUNAKAN
DALAM PERANCANGAN
Warna Threshold Hue Saturation Value
Merah Lower 330 45 150 Upper 360 255 255 Hijau Lower 83 113 100 Upper 157 255 255 Biru Lower 203 130 120 Upper 277 255 255
Setelah identifikasi warna dilakukan dan hanya terdeteksi satu warna dari 3 warna yang diinginkan, maka citra hitam-putih yang diperoleh selanjutnya dicek warna dari tiap pixel untuk sisi atas (259 pixel), bawah (259 pixel), kiri (125 pixel) & kanan (125 pixel). Pengecekan tiap
pixel tersebut dilakukan menggunakan fungsi looping pada flowstone dengan mengetahui empat
koordinat (pixel) sudut persegi panjang yang diinginkan. Empat koordinat sudut persegi panjang tersebut diketahui dengan Persamaan 9 sampai 12:
Kiri,atas = (cX – (259/2)),(cY – (125/2)) (9)
Kanan,atas = (cX + (259/2)),(cY – (125/2)) (10)
Kiri,bawah = (cX – (259/2)),(cY + (125/2)) (11)
Kanan,bawah = (cX + (259/2)),(cY + (125/2)) (12) Proses pengecekan tiap pixel tersebut dilakukan dari satu pixel ke pixel selanjutnya dengan arah pengecekan dari satu koordinat sudut (pixel) ke koordinat sudut (pixel) di sebelahnya seperti pada Gambar 13.
Gambar 13. Arah pengecekan pixel dari bentuk persegi panjang pada tiap sisinya
Gambar 14. Arah pengecekan pixel dari bentuk lingkaran pada seluruh
sisinya
Jika hasil pengecekan sisi persegi panjang menunjukkan bukan bentuk persegi panjang, maka akan dilanjutkan dengan pengecekan pixel sisi lingkaran (warna hitam atau putih). Pengecekan dilakukan dengan fungsi looping dari satu pixel ke pixel selanjutnya dengan step 1o dari 0o s/d 359o dan arah pengecekan seperti pada Gambar 14. Koordinat tiap pixel yang dicek diketahui dengan Persamaan 13 dan 14:
sin (13)
cos (14)
Keterangan: cX dan cY adalah koordinat titik pusat lingkaran,
jari-jari (r) sebesar 50 pixel, dalam radian 0 / 2 .
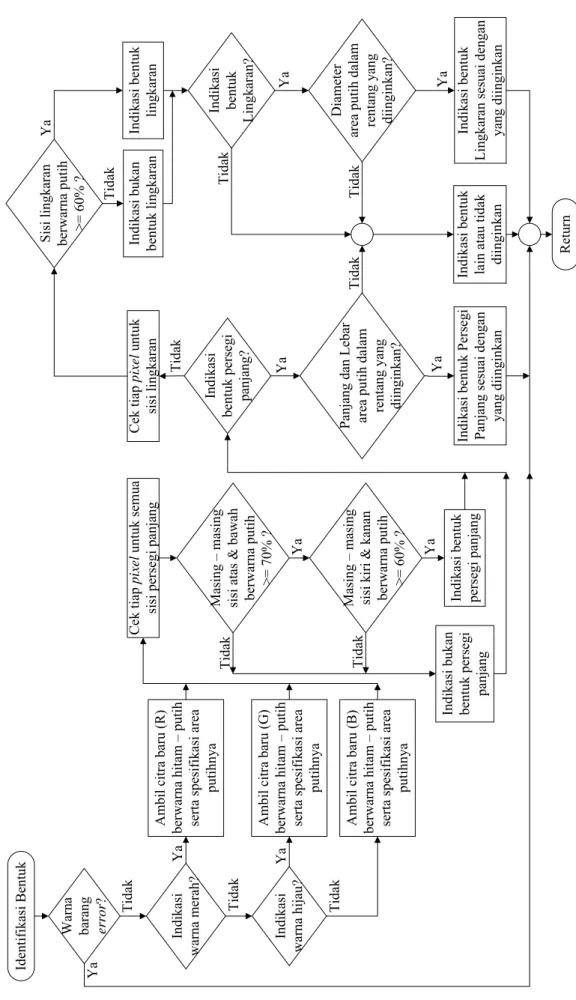
Untuk dikenali sebagai bentuk persegi panjang atau lingkaran, hasil pengecekannya tersebut harus memenuhi kriteria yang telah di-setting (berdasarkan Tabel 2), yaitu:
Pengecekan sisi atas dan bawah masing – masing harus >= 70 % berwarna putih, serta pengecekan sisi kiri dan kanan masing – masing harus >= 60 % berwarna putih.
Pengecekan tiap pixel sisi lingkaran harus >= 60 % berwarna putih.
Pada perancangan juga ditambahkan proses pengecekan panjang (horisontal) dan lebar (vertikal) dari area warna yang terdeteksi, supaya dapat diketahui kalau bentuk yang terdeteksi memiliki panjang & lebar atau diameter yang sesuai seperti yang diinginkan. Data kalibrasi untuk
pengecekan panjang dan lebar dari bentuk persegi panjang dan lingkaran dapat dilihat pada Tabel 3.
TABEL 2.DATA KALIBRASI UNTUK PENGECEKAN TIAP PIXEL DARI SISI PERSEGI PANJANG DAN LINGKARAN
No. Sisi (%)
Atas Bawah Kiri Kanan Lingkaran
1 89,9 90,3 72,8 74,4 87,5 2 91,5 91,8 76 84 75 3 89,5 93,4 62,4 84 70,8 4 86,1 91,1 75,2 80 75 5 74,9 87,2 60,8 81,6 87,5 6 90,3 90,7 75,2 81,6 62,5 >= 70 % >= 60 % >= 60 %
TABEL 3.DATA KALIBRASI UNTUK PENGECEKAN PANJANG DAN LEBAR DARI BENTUK PERSEGI PANJANG DAN
LINGKARAN
No. Panjang (pixel) Lebar (pixel)
1 256 131
2 269 137
3 259 129
4 264 142
No. Diameter (pixel)
Horisontal Vertikal 1 94 92 2 112 102 3 98 98 4 111 103
Berdasarkan Tabel 3, maka pixel di-setting untuk rentang panjang dan lebar dari bentuk persegi panjang serta diameter lingkaran yang diinginkan adalah:
255 < Panjang (pixel) < 270 & 128 < Lebar (pixel) < 143 90 < Diameter (pixel) < 115
Flowchart subprogram identifikasi bentuk dapat dilihat pada Gambar 15.
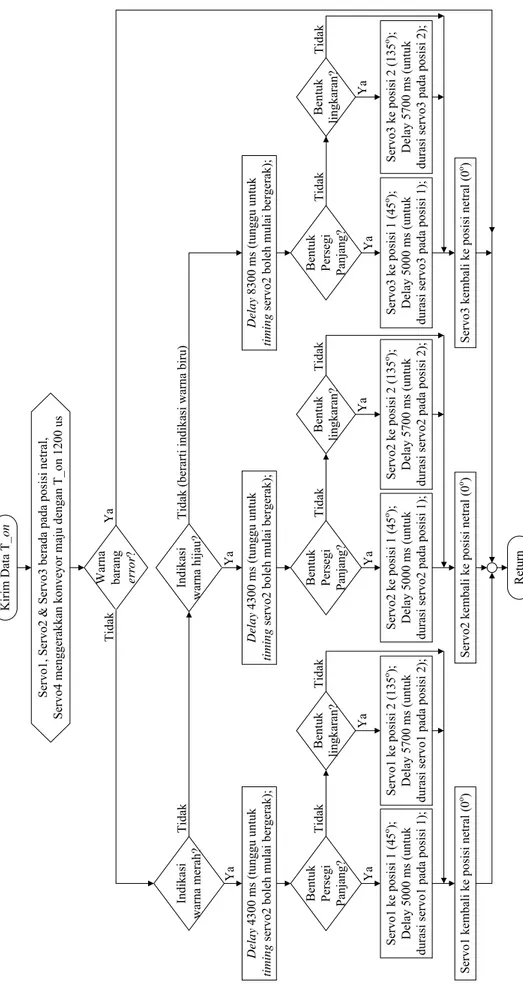
Selanjutnya, dari hasil identifikasi warna dan bentuk yang diperoleh, subprogram kirim data T_on akan mengirimkan sinyal kontrol ke ATmega16 berupa data lebar pulsa setiap servo sesuai dengan hasil identifikasi. Namun, supaya barang - barang yang hendak disortir dapat dimasukan tanpa harus menunggu proses penyortiran barang sebelumnya selesai terlebih dahulu, maka perlu diatur waktu yang tepat (timing) bagi motor servo penyortir barang untuk diijinkan bergerak serta durasi motor servo tersebut bertahan pada posisi menyortirnya kemudian kembali lagi ke posisi netralnya. Jadi motor servo penyortir barang hanya akan bergerak untuk menyortir barang ketika barang yang hendak disortir sudah berada di dekatnya dan segera kembali ke posisi netralnya setelah proses menyortirnya selesai. Untuk mengatur timing dan durasi bagi motor servo penyortir barang tersebut pada Flowstone digunakanlah fungsi delay. Untuk pengaturan delay dan data T_on untuk posisi tiap motor servo yang dikirimkan ke ATmega16 dapat dilihat dalam flowchart subprogram kirim data T_on pada Gambar 16.
Tidak Ti dak Ya Ti dak Tidak Ti dak Tidak Iden tifikasi Bentuk Cek tiap pixel untuk semu a si si persegi panja ng Cek tiap pixel un tuk sisi ling karan In dikasi bent uk Perseg i Panja ng sesuai den gan yan g diing inkan Indik asi ben tuk Lin
gkaran sesuai den
gan yan g d iingi nkan Indi kasi b entuk lain atau tidak di in gi nk an Return Tida k In dikasi bentu k persegi pa nj an g? Tidak Indika si bentu k Lingk aran? Ya Ya Ya Ya Tidak Tidak Indi kasi b entuk perse gi panjan g Indik asi ben tuk ling kara n Masing – m asing sisi atas & bawah berwarna putih >= 70% ? Masing – m asing
sisi kiri & kanan berwarna putih
>= 60% ? Indi kasi b ukan ben tuk perseg i panj ang Ya Ya Sisi lingk aran berw arna pu tih >= 6 0% ? Indikasi buk an bentuk li ngkaran Ya Ambil citra bar u (R ) be rwarna hitam – putih serta spesifikasi area put ihny a Wa rn a barang erro r? Ya Ya Indi kasi warna hij au? Indi kasi warn a m erah ? Ambil citr a baru (G) be rwarna hitam – putih serta spesifikasi area put ihny a Ambil citra bar u (B ) be rwarna hitam – putih serta spesifikasi area put ihny a Pan jang dan Lebar area putih da lam renta ng yang diingi nkan? Diameter area putih da lam rentan g ya ng di ingi nkan?
Ya Kir im Data T_ on Indi kasi warna hij au? Tidak Tidak (berarti in dikasi warna bi ru) Del a y 4300 ms (t unggu unt uk timi n g servo2 bol eh mulai b ergerak); Ya Ya Servo1 ke posisi 1 (4 5 o); Delay 5000 m s (untuk durasi
servo1 pada posisi 1);
Se
rvo1 kem
bali ke posisi netral (0
o) Retur n Ya Ya Ya Ya Ya Ya Tidak Ti dak Ti dak Tidak Ti dak Tid ak Bentu k Pe rs eg i Panjang? Bentuk Per segi Panjang? Bentuk Per seg i Panjang? Bentu k lingkara n? Bentuk lingk aran? Bent uk lingkaran? Servo 1, Servo
2 & Servo3 berada pada posisi
netral,
Se
rvo4 m
enggerakkan
konveyor maju deng
an
T_on
1200 us
Warna barang error
? Indik asi warna m erah? Tidak Delay 8300 ms (tu nggu untuk timing servo2 boleh m ulai bergerak); Delay 4300 ms (tu nggu untu k timin g servo2 boleh mulai bergerak); Servo1 ke posisi 2 (135 o); Delay 5700 m s (untuk durasi
servo1 pada posisi 2);
Servo2 ke posisi 1 (45
o);
Delay 5000 m
s (untuk
du
rasi servo2 pada po
sisi 1); Se rvo2 k e posi si 2 (135 o); Delay 57 00 ms (unt uk durasi servo2 pada posi si 2 ); Servo3 ke posisi 1 (4 5 o); D elay 5000 m s (untuk durasi
servo3 pada posisi 1);
Servo3 ke po sisi 2 (135 o); Delay 5700 ms (untuk du
rasi servo3 pada p
osisi 2); Se rvo2 kembali ke p osisi netral (0 o) Se rvo3 kem
bali ke posisi netral (0
o)
IV. DATA PENGAMATAN DAN ANALISA DATA
IV.1. Pengujian Warna
Artefak Pengenalan warna yang dilakukan dalam Flowstone memerlukan tiga range parameter yaitu, Hue, Saturation dan Value (HSV). Karena setiap warna memiliki nilai parameter HSV-nya masing–masing, maka perubahan tiap parameternya akan diidentifikasi sebagai warna yang berbeda pula. Untuk itu pengujian warna perlu dilakukan untuk dapat melihat performansi sistem yang telah dibuat dalam mengenali warna–warna yang telah ditentukan (merah, hijau, biru) terhadap setiap perubahan parameter HSV-nya. Pengujian warna ini dilakukan di dalam dua intensitas cahaya ruangan yang berbeda.
TABEL 4.DATA PENGENALAN WARNA MERAH TERHADAP PERUBAHAN HUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180
1 330,235,255 Terdeteksi Terdeteksi
2 342,235,255 Terdeteksi Terdeteksi
3 354,235,255 Terdeteksi Terdeteksi
4 6,235,255 Tidak terdeteksi Tidak terdeteksi
5 18,235,255 Tidak terdeteksi Tidak terdeteksi
6 30,235,255 Tidak terdeteksi Tidak terdeteksi
TABEL 5.DATA PENGENALAN WARNA MERAH TERHADAP PERUBAHAN SATURATION
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 359,125,255 Terdeteksi Terdeteksi 2 359,150,255 Terdeteksi Terdeteksi 3 359,175,255 Terdeteksi Terdeteksi 4 359,200,255 Terdeteksi Terdeteksi 5 359,225,255 Terdeteksi Terdeteksi 6 359,250,255 Terdeteksi Terdeteksi
TABEL 6.DATA PENGENALAN WARNA MERAH TERHADAP PERUBAHAN VALUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 359,235,125 Tidak terdeteksi Tidak terdeteksi 2 359,235,150 Tidak terdeteksi Tidak terdeteksi
3 359,235,175 Terdeteksi Terdeteksi
4 359,235,200 Terdeteksi Terdeteksi
5 359,235,225 Terdeteksi Terdeteksi
TABEL 7.DATA PENGENALAN WARNA MERAH TERHADAP PERUBAHAN STANDAR HUE,SATURATION,VALUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 348,255,165 Terdeteksi Terdeteksi 2 360,255,204 Terdeteksi Terdeteksi 3 360,175,255 Terdeteksi Terdeteksi 4 358,131,255 Terdeteksi Terdeteksi 5 360,102,255 Terdeteksi Terdeteksi
6 360,51,255 Tidak terdeteksi Tidak terdeteksi
Berdasarkan Tabel 4 sampai 7, hasil pengenalan warna merah pada Flowstone didapat 2
error, yaitu saat Value = 150 dan saat Saturation = 51, sehingga % error yang mungkin terjadi
dalam pengenalan warna merah terhadap perubahan parameter – parameter HSV-nya yaitu sebesar 8,33%.
TABEL 8.DATA PENGENALAN WARNA HIJAU TERHADAP PERUBAHAN HUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 90,235,255 Terdeteksi Terdeteksi 2 102,235,255 Terdeteksi Terdeteksi 3 114,235,255 Terdeteksi Terdeteksi 4 126,235,255 Terdeteksi Terdeteksi 5 138,235,255 Terdeteksi Terdeteksi 6 150,235,255 Terdeteksi Terdeteksi
TABEL 9.DATA PENGENALAN WARNA HIJAU TERHADAP PERUBAHAN SATURATION
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 120,125,255 Terdeteksi Terdeteksi 2 120,150,255 Terdeteksi Terdeteksi 3 120,175,255 Terdeteksi Terdeteksi 4 120,200,255 Terdeteksi Terdeteksi 5 120,225,255 Terdeteksi Terdeteksi 6 120,250,255 Terdeteksi Terdeteksi
TABEL 10.DATA PENGENALAN WARNA HIJAU TERHADAP PERUBAHAN VALUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 120,235,125 Terdeteksi Terdeteksi 2 120,235,150 Terdeteksi Terdeteksi 3 120,235,175 Terdeteksi Terdeteksi 4 120,235,200 Terdeteksi Terdeteksi 5 120,235,225 Terdeteksi Terdeteksi 6 120,235,250 Terdeteksi Terdeteksi
TABEL 11.DATA PENGENALAN WARNA HIJAU TERHADAP PERUBAHAN STANDAR HUE,SATURATION,VALUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180
1 120,255,51 Tidak terdeteksi Tidak terdeteksi
2 120,255,128 Terdeteksi Terdeteksi
3 120,191,204 Terdeteksi Terdeteksi
4 120,153,255 Terdeteksi Terdeteksi
5 120,102,255 Terdeteksi Terdeteksi
6 120,51,255 Tidak terdeteksi Tidak terdeteksi
Berdasarkan Tabel 8 sampai 11, hasil pengenalan warna hijau pada Flowstone didapat 1
error, yaitu saat Saturation = 102, sehingga % error yang mungkin terjadi dalam pengenalan
warna hijau terhadap perubahan parameter – parameter HSV-nya yaitu sebesar 4,17%.
TABEL 12.DATA PENGENALAN WARNA BIRU TERHADAP PERUBAHAN HUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 210,235,255 Terdeteksi Terdeteksi 2 222,235,255 Terdeteksi Terdeteksi 3 234,235,255 Terdeteksi Terdeteksi 4 246,235,255 Terdeteksi Terdeteksi 5 258,235,255 Terdeteksi Terdeteksi
TABEL 13.DATA PENGENALAN WARNA BIRU TERHADAP PERUBAHAN SATURATION
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 240,125,255 Terdeteksi Terdeteksi 2 240,150,255 Terdeteksi Terdeteksi 3 240,175,255 Terdeteksi Terdeteksi 4 240,200,255 Terdeteksi Terdeteksi 5 240,225,255 Terdeteksi Terdeteksi 6 240,250,255 Terdeteksi Terdeteksi
TABEL 14.DATA PENGENALAN WARNA BIRU TERHADAP PERUBAHAN VALUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 240,235,125 Terdeteksi Terdeteksi 2 240,235,150 Terdeteksi Terdeteksi 3 240,235,175 Terdeteksi Terdeteksi 4 240,235,200 Terdeteksi Terdeteksi 5 240,235,225 Terdeteksi Terdeteksi 6 240,235,250 Terdeteksi Terdeteksi
TABEL 15.DATA PENGENALAN WARNA BIRU TERHADAP PERUBAHAN STANDAR HUE,SATURATION,VALUE
No. Warna H,S,V Intensitas Cahaya Ruangan
85 < lux < 95 175 < lux < 180 1 240,255,102 Terdeteksi Terdeteksi 2 240,204,255 Terdeteksi Terdeteksi 3 225,204,255 Terdeteksi Terdeteksi 4 220,153,255 Terdeteksi Terdeteksi 5 210,102,255 Terdeteksi Terdeteksi
6 202,51,255 Tidak terdeteksi Tidak terdeteksi
Berdasarkan Tabel 11 sampai 15, hasil pengenalan warna biru pada Flowstone didapat 4
error, yaitu saat Hue = 270, saat Saturation = 125 & 102, dan saat Value = 102, sehingga % error yang mungkin terjadi dalam pengenalan warna biru terhadap perubahan parameter –
parameter HSV-nya yaitu sebesar 16,67%.
Dari pengamatan data untuk pengujian warna, dapat dilihat bahwa hampir setiap error terjadi saat salah satu parameter HSV-nya mendekati batas ambang bawah (Lower Threshold) dan batas ambang atas (Upper Threshold) dari parameter HSV yang diinginkan (dapat dilihat pada Tabel 1).
IV.2. Pengujian Bentuk
Pengenalan bentuk yang dirancang di dalam Flowstone membutuhkan dua parameter yaitu, hasil pengecekan sisi dan spesifikasi bentuk yang diidentifikasi. Karena pengecekan spesifikasi (panjang dan lebar atau diameter) dilakukan dalam rentang yang ditentukan, maka perlu dilakukan pengujian untuk dapat melihat rentang panjang (untuk persegi panjang) dan rentang diameter (untuk lingkaran) yang diijinkan hingga dapat dikenali sebagai bentuk dengan spesifikasi yang diinginkan. Selain itu, karena proses pengecekan sisi pun harus dapat mengenali bentuk persegi panjang dan lingkaran, maka perlu dilakukan pengujian untuk dapat melihat hasil pengecekan sisi dalam mengenali bentuk yang diinginkan (persegi panjang dan lingkaran) dan bentuk yang tidak diinginkan (seperti jajar genjang, trapesium dan segitiga).
TABEL 16.DATA PENGENALAN BENTUK LINGKARAN TERHADAP PERUBAHAN DIAMETERNYA
No. Diameter (cm) Hasil
1 2.8 Tidak teridentifikasi 2 2.9 Tidak teridentifikasi 3 3 Teridentifikasi 4 3.1 Teridentifikasi 5 3.2 Teridentifikasi 6 3.3 Teridentifikasi 7 3.4 Teridentifikasi 8 3.5 Tidak teridentifikasi 9 3.6 Tidak teridentifikasi 10 3.7 Tidak teridentifikasi
TABEL 17.DATA PENGENALAN BENTUK PERSEGI PANJANG TERHADAP PERUBAHAN PANJANGNYA
No. Panjang (cm) Hasil
1 7.7 Tidak teridentifikasi 2 7.8 Tidak teridentifikasi 3 7.9 Teridentifikasi 4 8 Teridentifikasi 5 8.1 Teridentifikasi 6 8.2 Teridentifikasi 7 8.3 Teridentifikasi 8 8.4 Teridentifikasi 9 8.5 Tidak teridentifikasi 10 8.6 Tidak teridentifikasi
Berdasarkan Tabel 16, pengenalan bentuk lingkaran berada pada rentang perubahan diameter dari 3 cm sampai 3,4 cm, sehingga bentuk lingkaran dengan diameter di luar rentang tersebut akan dikenali sebagai bentuk lain.
Berdasarkan Tabel 17, pengenalan bentuk persegi panjang berada pada rentang perubahan panjang dari 7,9 cm sampai 8,4 cm, sehingga bentuk persegi panjang dengan panjang di luar rentang tersebut akan dikenali sebagai bentuk lain.
TABEL18.DATA IDENTIFIKASI BENTUK (PERSEGI PANJANG DAN LINGKARAN)TERHADAP SAMPEL BENTUK LAIN
No. Bentuk Gambar
Hasil Deteksi Bentuk (8 x 4 cm) (3,2 x 3,2 cm) 1 Jajar genjang Tidak teridentifikasi Tidak teridentifikasi
2 teridentifikasi Tidak teridentifikasi Tidak
3
Trapesium
Tidak
teridentifikasi teridentifikasi Tidak
4 teridentifikasi Tidak teridentifikasi Tidak
5 Segitiga Tidak teridentifikasi Tidak teridentifikasi
6 teridentifikasi Tidak teridentifikasi Tidak
Berdasarkan Tabel 18, proses identifikasi bentuk terhadap beberapa sampel bentuk lain (jajar genjang, trapesium dan segitiga) dapat mengidentifikasi setiap sampel bentuk tersebut sebagai bentuk yang tidak diinginkan sehingga dapat membuang barang dengan bentuk lain tersebut ke tempat yang diinginkan.
V. KESIMPULAN
Dari hasil pengamatan Tabel 4 sampai 15, % error pendeteksian warna merah, hijau dan biru masing – masing adalah sebesar 8,33%, 4,17% dan 16,67%, dengan error yang terjadi di sekitar/ mendekati batas ambang threshold parameter HSV yang ditentukan (dapat dilihat pada Tabel 1).
Dari hasil pengamatan Tabel 16 dan 17, pengenalan bentuk lingkaran berada pada rentang perubahan diameter dari 3 cm sampai 3,4 cm dengan setting rentang diameter pada program Flowstone antara 90 pixel sampai 115 pixel (berdasarkan Tabel 3), dan pengenalan bentuk persegi panjang berada pada rentang perubahan panjang dari 7,9 cm sampai 8,4 cm dengan
setting rentang panjang pada program Flowstone antara 255 pixel sampai 270 pixel
(berdasarkan Tabel 3). Dari hasil pengamatan Tabel 18, proses identifikasi bentuk berdasarkan pada pengenalan sisi persegi panjang dan lingkaran dapat membuang bentuk lain seperti jajar genjang, trapesium dan segitiga.
DAFTAR REFERENSI
[1] Malc. FlowStone: “User Guide” version 3.0.1, DSP Robotics, 2012.[2] Website DSP Robotics, “Tutorial”. (http://www.dsprobotics.com/tutorials.html, diakses tanggal 26 Maret 2013)
[3] Website RapidTables, “RGB to HSV color conversion”.
(http://www.rapidtables.com/convert/color/rgb-to-hsv.htm, diakses tanggal 20 Desember 2013) [4] Malc. FlowStone: “Component Reference” version 3.0.4, DSP Robotics, 2013.
[5] A. P. Kusuma, “Analisis Algoritma Transformasi Hough dalam Mendeteksi Lingkaran dan Elips berbasis Pengolahan Citra Digital”, Tugas Akhir Program Sarjana Fakultas Elektro dan Komunikasi, Institut Teknologi Telkom, Bandung, 2013
![Gambar 3. Konversi RGB ke HSV dalam Flowstone [4]](https://thumb-ap.123doks.com/thumbv2/123dok/4665949.3421918/4.892.221.678.128.274/gambar-konversi-rgb-ke-hsv-dalam-flowstone.webp)