i
LAMPU LALU LINTAS BERBASIS
MIKROKONTROLER AT89S51
TUGAS AKHIR
Diajukan untuk memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Jurusan Teknik Elektro
Disusun Oleh: Danang Eka Saputra
NIM : 005114087
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
SYSTEM BASED ON AT89S51 MICROCONTROLLER
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements to Obtain the Sarjana Teknik Degree
Electrical Engineering Study Program
By :
Danang Eka Saputra
Student Number : 005114087
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
v
Dengan ini saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan daftar pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, 31 Januari 2007
vi
Di zaman modern ini perkembangan teknologi sangat cepat sekali, begitu juga pada alat-alat elektronik dan aplikasi dari alat elektronik itu. Alat-alat elektronik yang diciptakan dimaksudkan dapat mempermudah sistem kerja manusia, memiliki kecepatan tinggi, handal dan sebagainya. Salah satunya contohnya adalah mikrokontroler yang merupakan terobosan teknologi mikroprosesor dan mikrokomputer. Hal ini melatarbelakangi dibangunnya sistem prioritas pada lampu lalu lintas dengan mikrokontroler AT89S51.
Alat pada sistem ini terdiri dari 3 struktur yaitu masukan, pemroses dan keluaran. Masukan alat ini adalah kendaraan-kendaraan (kereta api, mobil bersirine, mobil tidak bersirine) yang dideteksi oleh sensor sebagai penentuan prioritas pada sistem. Mikrokontroler AT89S51 digunakan sebagai pemroses masukan. Sebagai keluaran digunakan satu buah lampu 12 volt untuk lampu indikator, dua puluh tujuh buah bola lampu 12 Volt untuk lampu lalu lintas, motor untuk menggerakkan palang pintu kereta api.
vii
In this modern period the development of technology is very fast, so do electricals and the application of it. The creating of its are intended to make easier human work system, have high rate, reliable, etc. The example is microcontroller which is a breaktrough microprocessor and microcomputer. Based on this, priority system on traffic light with microcontroller AT89S51 is made.
The component from this system consist of three structures, they are input, procession, and output. The input is vehicle (train, car with siren, car without siren) which are detected by sensor as priority determine on system. Microcontroller AT89S51 is used as input procession. As output is used 12 volt lamp as much one for indicator lamp, 12 volt lamp as much twenty seven for traffic light, and motor to move train crossbar.
viii
HALAMAN JUDUL……….. i
HALAMAN PERSETUJUAN……….. iii
HALAMAN PENGESAHAN……… iv
HALAMAN PERNYATAAN……… v
HALAMAN MOTTO dan PERSEMBAHAN………. vi
INTI SARI……… vii
ABSTRACT………. viii
KATA PENGANTAR………. ix
DAFTAR ISI………. xi
DAFTAR GAMBAR……… xv
DAFTAR TABEL……… xviii
DAFTAR LAMPIRAN……… xix
BAB I PENDAHULUAN 1.1 Judul……… 1
1.2 Latar Belakang Masalah………. 1
1.3 Tujuan Penelitian……… 2
1.4 Manfaat Penenlitian……… 2
1.5 Batasan Masalah………. 2
1.6 Perumusan Masalah………. 3
1.7 Sistematika Penulisan………. 3
BAB II DASAR TEORI 2.1 Memori Mikrokontroler AT89S51……… 4
ix
2.4 Special Function Register (SFR)………... 6
2.5 Register Dasar……… 6
BAB III PERANCANGAN 3.1 Perancangan Perangkat Keras………. 9
3.1.1 Spesifikasi Perangkat Keras……… 10
3.1.2 Mikrokontroler……… 10
3.1.2.1Unit Kendali Lampu Lalu Lintas. ……….. 11
3.1.2.2Unit Kendali Palang dan Alarm Kereta Api…….……….. 12
3.2 Perancangan Perangkat Lunak……… 15
3.2.1 Program Pengendali Kendali Lampu Lalu Lintas . 18 3.2.1.1 Program Penyalaan Lampu Lalu-Lintas Untuk Status Normal……… 18
3.2.1.2 Program Utama Penyalaan Lampu Lalu - Lintas Untuk Status Prioritas Informasi…….21
3.2.2 Program Kendali Palang Dan Alarm Kereta Api … 32 3.2.3 Tunda Waktu ………... 34
BAB IV ANALISA DAN PEMBAHASAN 4.1 Program Utama……….. 38
4.2 Program Subrutin Pengecekan Informasi ……….. 43
4.3 Program Informasi Kereta Api ……… 44
4.4 Program Informasi Kendaraan Sirine ………. 47
4.5 Program Informasi Antrian Kendaraan ………... 52
x
Simulasinya……….……….56 BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan………. 81
5.2 Saran……… 81
xi
Gambar 2.1 Program Status Word (PSW)………... 6
Gambar 3.1 Blok Diagram perancangan lampu lalu lintas ……… 8
Gambar 3.2 Skema mikrokontroler beserta rangkaian kendali lainnya... 9
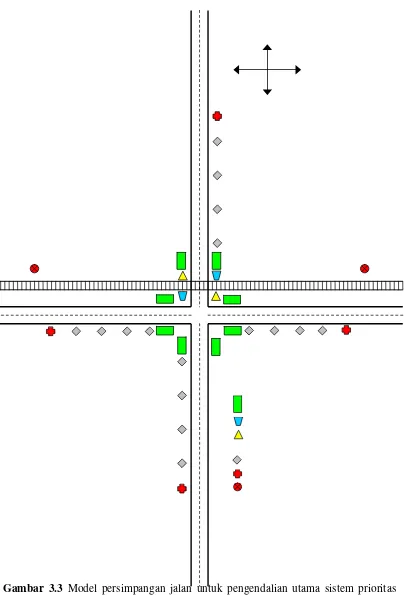
Gambar 3.3 Model persimpangan jalan untuk pengendalian utama sistem prioritas lampu lalu lintas... 15
Gambar 3.4 Diagram penyalaan lampu lalu lintas status normal... 18
Gambar 3.5 Diagram pengecekan informasi sistem prioritas lampu lalu-lintas... 19
Gambar 3.6 Diagram pengecekan informasi kereta api... 21
Gambar 3.7a Diagram alir program pengecekan informasi kereta api... 22
Gambar 3.7b Diagram alir program pengecekan informasi kereta api... 23
Gambar 3.8 Diagram pengecekan informasi kendaraan sirine... 24
Gambar 3.9 Diagram alir program pengecekan informasi kendaraaan bersirine ... 25
Gambar 3.10 Diagram pengecekan informasi antrian kendaraan... 30
Gambar 3.11 Diagram alir program informasi antrian kendaraan ……… 31
Gambar 3.12 Diagram alir program kendali palang dan alarm kereta api …... 34
Gambar 3.13a Diagram alir waktu tunda ……….………... 36
Gambar 3.13b Diagram alir waktu tunda …….……….………….. 37
Gambar 4.1 Osiloskop Digital Pada Kaki LED ……….. 44
Gambar 4.2 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 5 Detik Di Utara ……….……….. 45
xii
Gambar 4.5 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 20 Detik Di Utara ………. 48 Gambar 4.6 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 5
Detik Di Timur ………. 49 Gambar 4.7 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 10
Detik Di Timur………. 50
Gambar 4.8 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 15 Detik Di Timur ………... 51 Gambar 4.9 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 20
Detik Di Timur……….. 52 Gambar 4.10 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 5
Detik Di Selatan ……… 53 Gambar 4.11 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 10
Detik Di Selatan………. 54 Gambar 4.12 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 15
Detik Di Selatan ……….………... 55 Gambar 4.13 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 20
Detik Di Selatan ……… 56 Gambar 4.14 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 5
Detik Di Barat ………... 57 Gambar 4.15 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 10
Detik Di Barat………. 58 Gambar 4.16 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 15
Detik Di Barat ………. 59 Gambar 4.17 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 20
xiii
Utara ………... 60 Gambar 4.19 Contoh Simulasi Program Sistem Kendaraan Sirine Datang Dari
Arah Utara Dan Melewati Arah Timur ….……… 61 Gambar 4.20 Simulasi Program Sistem Kendaraan Sirine Datang Dari Arah
Timur……….……… 62 Gambar 4.21 Contoh Simulasi Program Sistem Kendaraan Sirine Datang Dari
Arah Timur Dan Melewati Arah Selatan ………... 62 Gambar 4.22 Simulasi Program Sistem Kendaraan Sirine Datang Dari Arah
Selatan ……….…………..……… 63
Gambar 4.23 Contoh Simulasi Program Sistem Kendaraan Sirine Datang Dari Arah Selatan Dan Melewati Arah Barat ……….. 64 Gambar 4.24 Simulasi Program Sistem Kendaraan Sirine Datang Dari Arah
Barat ……… 64 Gambar 4.25 Contoh Simulasi Program Sistem Kendaraan Sirine Datang Dari
Arah Barat Dan Melewati Arah Utara……… 65 Gambar 4.26 Simulasi Program Sistem Kereta Api Datang Dari Arah Timur .. 66 Gambar 4.27 Simulasi Program Sistem Kereta Api Datang Dari Arah Barat … 67 Gambar 4.28 Simulasi Program Sistem Kereta Api Datang Dari Arah Barat
Dengan Palang Pintu Terbuka Karena Ada Kendaraan Pada Daerah Palang Pintu Tersebut ……… 68 Gambar 4.29 Simulasi Program Sistem Kereta Api Mempengaruhi Persimpangan
xiv
Tabel 3.1 Fungsi port (pin) mikrokontroler untuk unit kendali lampu
lalu lintas………... 11
Tabel 3.2 Port (pin) mikrokontroler untuk unit kendali palang dan alarm kereta api………... 13
Tabel 3.3 Penyalaan lampu lalu lintas untuk status normal... 17
Tabel 3.4a Input/output .prioritas informasi. kendaraan sirine untuk simpang utara ………... 26
Tabel 3.4b Input/output .prioritas informasi. kendaraan sirine untuk simpang timur ………... 27
Tabel 3.4c Input/output .prioritas informasi. kendaraan sirine untuk simpang selatan ………... 28
Tabel 3.4d Input/output .prioritas informasi. kendaraan sirine untuk simpang barat ………... 29
Tabel 3.5 Input/output prioritas informasi antrian kendaraan... 32
Tabel 3.6 Input/output prioritas informasi kereta api ……... 33
Tabel 4.1 Penentuan sensor antrian kendaraan dengan selektor ... 44
Tabel 4.2 Hasil Pengujian sistem prioritas antrian kendaraan untuk arah utara ………... 45
Tabel 4.3 Hasil Pengujian sistem prioritas antrian kendaraan untuk arah timur ………... 48
Tabel 4.4 Hasil Pengujian sistem prioritas antrian kendaraan untuk arah selatan..………... 52
xv
Tabel 4.7 Hasil Pengujian sistem prioritas kendaraan bersirine untuk arah timur……….………... 61 Tabel 4.8 Hasil Pengujian sistem prioritas kendaraan bersirine untuk
arah selatan.……….………... 63 Tabel 4.9 Hasil Pengujian sistem prioritas kendaraan bersirine untuk
1 BAB I
PENDAHULUAN
1.1 Judul
Pengendali Utama Pada Sistem Prioritas Lampu Lalu Lintas Berbasis Mikrokontroler AT89S51.
1.2 Latar Belakang Masalah
Perkembangan jaman yang semakin maju pada kota-kota besar tidak pernah lepas dari mobilitas yang semakin tinggi dan sering kali terjadi kemacetan terutama pada persimpangan jalan sehingga dapat menyebabkan kendaraan-kendaraan tertentu seperti ambulance; pemadam kebakaran, dan sebagainya ikut terjebak dalam kemacetan tersebut dan juga bukan hal yang mustahil terjadi kecelakaan kereta api. Hal ini disebabkan sistem pengaturan lampu lalu lintas yang digunakan pada persimpangan jalan kurang efisien dan praktis. Untuk mengatasi kekurangan ini diperlukan suatu sistem prioritas lampu lalu lintas yang lebih efisien dan praktis dari sebelumnya.
1.3 Tujuan Penelitian
Adapun tujuan dari penelitian karya tulis ini adalah sebagai berikut:
1. Mengaplikasikan mikrokontroler AT89S51 sebagai pengendali pada rangkaian lampu lalu lintas.
2. Memberikan prioritas pada suatu mobil/kendaraan yang ingin didahulukan 3. Mengurangi arus kemacetan/kepadatan, kecelakaan kendaraan pada
persimpangan.
1.4 Manfaat Penelitian
Dengan adanya penelitian ini diharapkan perangkat yang dibuat dapat menggantikan sistem lampu lalu lintas yang lama (manual atau digital) ke sistem prioritas lampu lalu-lintas yang lebih efisien dan praktis. Sehingga dengan sistem yang baru arus lalu lintas dapat lebih lancar terutama untuk kendaraan-kendaraan yang diprioritaskan seperti kereta api, mobil ambulance; mobil pemadam kebakaran, mobil polisi, serta antrian yang panjang guna untuk menghindari kemacetan.
1.5 Batasan Masalah
Batasan masalah dalam pembuatan perangkat lunak untuk sistem prioritas lampu lalu-lintas adalah sebagai berikut:
1. Menentukan tingkatan prioritas informasi sesuai dengan kendaraan prioritasnya
1.6 Rumusan Masalah
Sesuai batasan masalah yang telah diuraikan di muka, maka dalam pembuatan sistem ini dapat dirumuskan beberapa masalah sebagai berikut:
1. Bagaimana merencanakan hardware yang meliputi rangkaian sistem minimum mikrokontroler AT89S51 yang dilengkapi rangkaian masukan data dari sensor-sensor yang digunakan sehingga dapat difungsikan sebagai pengendalian utama sistem prioritas lampu lalu lintas.
2. Bagaimana merencanakan software yang dapat mengidentifikasi masukan data sehingga dapat mengendalikan sistem minimum mikrokontroler AT89S51. 3. Bagaimana hasil di lapangan mengenai unjuk kerja hardware dan software,
apakah sesuai dengan yang diharapkan.
1.7 Sistematika Penulisan
Pembahasan secara keseluruhan dari tugas akhir ini akan dibagi menjadi enam bab, yaitu:
BAB I Pendahuluan yang berisi judul, latar belakang masalah, tujuan, manfaat, batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB II Dasar teori, berisi teori mikrokontroler AT89S51
BAB III Perancangan yaitu perancangan perangkat keras dari pengendalian system prioritas lampu lalu lintas dan perancangan perangkat lunak, yang terdiri dari penggunaan diagram alir, tabel-tabel.
BAB IV Hasil dan pembahasan, memuat pengamatan dan pembahasan mengenai hasil penelitian yang telah dilaksanakan.
4 BAB II
DASAR TEORI
Mikrokontroler AT89S51 merupakan keluarga mikrokontroler 8051 yang pertama kali dikeluarkan oleh Intel, sedangkan AT89S51 sendiri merupakan salah satu buatan dari atmel. Atmel sendiri merupakan pabrik pembuatan IC yang sangat menguasai teknologi dalam pembuatan FPEROM (Flash programmable and Erasable Read Only Memory). FPEROM adalah (Read Only Memory) yang dapat dihapus dan ditulis kembali dengan teknologi flash. Kelebihan flash ini adalah mikrokontroler dapat menyimpan program secara internal, tidak membutuhkan ROM eksternal.
Program dapat langsung ditulis menimpa program sudah terdapat pada mikrokontroler apabila program akan diganti. Mikrokontroler menjadi sederhana, murah dan pemakaiannya menjadi cepat. AT89S51 yang dipakai memiliki 4 kBytes Flash
Progammable and Erasable Read Only Memory (FPEROM), 128 Bytes RAM
(Random Access Memory), 32 jalur I/O (input/output), dan dua 16-bit timers/counters. 2.1 Memori Mikrokontroler AT89S51
Mikrokontroler memiliki memori program dan memori data yang terpisah. Program diletakkan pada memori ROM (Read Only Memory) sedangkan data diletakkan pada RAM (Random Acces Memory).
2.2 Memori Program
walaupun mikrokontroler kehilangan catu daya (non volatile memory). ROM yang dipakai adalah FPEROM.
Mikrokontroler dapat mencapai 64 kB, terdiri dari memori internal dan
eksternal. Memori internal dalam mikrokontroler sebesar 4 kB.
2.3 Memori Data
Memori data menggunakan memori jenis RAM (Random Acces Memory). RAM merupakan memori yang dapat dibaca dan ditulisi. RAM dipakai sebagai penyimpan data pada saat program bekerja. Isi RAM akan hilang bila catu daya mati (volatile memory).
Mikrokontroler AT89S51 dapat memiliki memori data internal 255 Bytes dan bisa diperbesar dengan memori eksternal sampai dengan terdiri dari 4 kB memori internal dan 60 kB memori eksternal.
Memori internal mempunyai alamat dari 00h sampai FFh, terbagi menjadi dua bagian, yaitu alamat 00h sampai 7Fh seperti RAM selayaknya, sedangkan memori 80h sampai FFh dipakai sebagai SFR (Special Function Register). Dengan demikian hanya setengah dari jumlah memori yang dapat digunakan.
Memori data 00h sampai 7Fh bisa dipakai sebagai memori penyimpan data biasa, dibagi menjadi 3 bagian :
1. Bank register. Terdiri dari 4 bank register. Masing-masing terdiri dari 8 register yang disebut R0 sampai dengan R7. Pada suatu saat hanya dapat digunakan 1 buah Bank register.
2. Memori yang dapat dialamati secara bit, yaitu antara 20h sampai 2Fh. Pada daerah ini dapat dialamati secara Byte (20h – 2Fh) atau dialamati secara bit (00h - 7Fh). 3. Register Serba Guna (Multi Function Register). Memori 30h sampai 7Fh
Register Fungsi Khusus menempati memori antara 80 sampai dengan FF digunakan untuk alamat register-register khusus.
2.4. Special Function Register (SFR)
SFR adalah bagian dari RAM yang dipakai untuk mengatur perilaku mikrokontroler yang berisi register dasar, register data input/output, dan register status. Register dasar diperlukan untuk menulis program. Register data input/output
berguna untuk menyimpan data pada port tertentu. Register status berguna untuk mengatur kerja timer (TCON), serial control (SCON), dan interrupt (IE dan IP).
2.5 Register Dasar
Yang termasuk register dasar adalah program counter (PC), akumulator (A),
stack pointer (SP), program status word (PSW). Register khas dari keluarga mikrokontroler 8051 adalah register B, dan data pointer register (DPTR).
1. Program Counter (PC). Merupakan register 16 bit yang berisi alamat yang akan dikerjakan. Saat reset PC bernilai $0000. nilai PC akan bertambah 1 setelah prosesor mengambil instruksi 1 Byte.
2. Akumulator (A). Sesuai dengan namanya accumulate yang artinya menampung, register A berfungsi untuk menampung.
3. Stack pointer Register (SP). Digunakan sebagai penyimpan sementara nilai PC sebelum prosesor menjalan sub-rutin. Saat prosesor selesai mengerjakan sub-rutin, nilai PC akan dikembalikan dengan cara mengambil dari SP.
4. Program Status Word (PSW). Merupakan register 8 bit yang terdiri atas bit CY, AC, FO, RS0, RS1, OV, dan P seperti yang ditunjukkan pada Gambar 2.1. Bit ke 1 tidak digunakan. Register ini berfungsi untuk menyimpan informasi status prosesor. Fungsi-fungsi bit pada PSW sebagai berikut :
AC : auxiliary carry setelah operasi aritmatika FO : flag untuk fungsi umum
RS1, RS2 : untuk memilih bank register OV : overflow setelah operasi aritmatika P : paritas
bit bit Bit bit bit bit bit bit
CY AC FO RS RS OV - P
Gambar 2.1 Program Status Word (PSW)
5. Register B. Register 8 bit yang tugasnya membantu akumulator.
8 BAB III
PERANCANGAN
3.1 Perancangan Perangkat Keras
Perancangan perangkat keras sistem pengendalian dari sistem prioritas lampu lalu-lintas dengan mikrokontroler berbasis AT89S51 berdasarkan prinsip-prinsip dasar teori yang ada pada BAB II dan juga yang ditunjukkan pada Gambar 3.1. Perangkat keras ini dirancang untuk mengendalikan keluaran pada lampu lalu-lintas sebagai hasil masukan yang diterima dari sensor-sensor. Tahapan proses ini terdiri dari beberapa tahap yaitu:
1. Menentukan spesifikasi dari system yang dibuat.
2. Menentukan komponen-komponen utama yang akan digunakan untuk merealisasi sistem. Komponen yang dijual juga mudah didapat di pasaran. 3. Merancang rangkaian (circuit) mikrokontroler dan penampil.
4. Menggabungkan rangkaian bagian-bagian yang dirancang sehingga perangkat keras yang dapat bekerja dengan baik.
Unit pendeteksi kereta api dan antrian kendaraan
Unit kendali utama Sub Unit kendali
Lampu lalu lintas dan
indikator Unit Kendali
Gambar 3.1 Blok diagram perancangan lampu lalu lintas Unit pendeteksi sirine
kendaraan
3.1.1 Spesifikasi Perangkat Keras
Adapun penentuan spesifikasi ini berguna untuk memberikan batasan dalam menentukan kemampuan dan kelebihan alat. Spesifikasi sistem yang akan dibuat adalah sebagai berikut:
1. Lampu lalu-lintas dapat bekerja dengan baik sesuai rutenya dan dapat memberi respon dari input yang diterima.
2. Mikrokontroler AT89S51. 3.1.2 Mikrokontroler
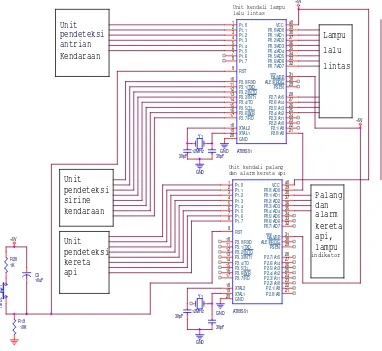
Gambar 3.2. Skema mikrokontroler beserta rangkaian kendali lainnya
+5V +5V +5V AT89S51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 20 40 RST XTAL2 XTAL1 PSEN ALE/PROG EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 GND VCC AT89S51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 20 40 RST XTAL2 XTAL1 PSEN ALE/PROG EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 GND VCC GND GND 30pF GND 30pF Y1 12MHz GND 30pF 30pF Y1 12MHz R19 10K C3 10uF SW 1 T M B L_R S T R20 1K Unit pendeteksi sirine kendaraan Unit pendeteksi kereta api Lampu lalu lintas Palang kereta api, Kendaraan Unit pendeteksi antrian dan alarm lampu indikator
Unit kendali palang dan alarm kereta api
Untuk mengubah masukan yang berasal dari sensor agar lampu lalu-lintas menyala, maka salah satunya digunakan mikrokontroler untuk mengatur semua proses input dan output sesuai dengan yang diharapkan. Mikrokontroler yang digunakan dalam perancangan ini yaitu AT89S51 seperti yang ditunjukan pada Gambar 3.2. Mikrokontroler ini mempunyai kristal pembangkit detak yang menggunakan frekuensi 12 MHz serta 4 port yaitu port 0, port 1, port 2, port 3 dimana masing-masing port terdiri dari 8 pin. Pada perancangan perangkat keras ini menggunakan 3 buah mikrokontroler. Hal ini dikarenakan agar kinerja pada mikrokontroler lebih efisien sehingga tunda waktu yang dibutuhkan untuk pernyalaan lampu lalu-lintas hampir sesuai dengan yang diharapkan. Adapun 2 buah mikrokontroler dipasang pada tiap-tiap sensor untuk mendeteksi masukan yang diterima dari sensor untuk antrian kendaraan dan sensor kereta api yang kemudian data dikirim ke mikrokontroler lainnya. Satu buah mikrokontroler lainnya sebagai mendeteksi masukan dari sensor kendaraan bersirine dan pengatur nyala-matinya lampu lalu-lintas serta pengolah informasi dari yang diterima dari mikrokontroler pada sensor. Jadi disini mikrokontroler dibagi menjadi 2 bagian fungsi:
- Unit Kendali Lampu Lalu Lintas
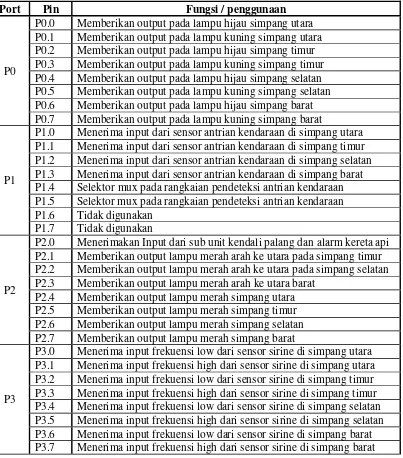
Tabel 3.1 Fungsi port (pin) mikrokontroler untuk unit kendali lampu lalu lintas Port Pin Fungsi / penggunaan
P0
P0.0 Memberikan output pada lampu hijau simpang utara P0.1 Memberikan output pada lampu kuning simpang utara P0.2 Memberikan output pada lampu hijau simpang timur P0.3 Memberikan output pada lampu kuning simpang timur P0.4 Memberikan output pada lampu hijau simpang selatan P0.5 Memberikan output pada lampu kuning simpang selatan P0.6 Memberikan output pada lampu hijau simpang barat P0.7 Memberikan output pada lampu kuning simpang barat
P1
P1.0 Menerima input dari sensor antrian kendaraan di simpang utara P1.1 Menerima input dari sensor antrian kendaraan di simpang timur P1.2 Menerima input dari sensor antrian kendaraan di simpang selatan P1.3 Menerima input dari sensor antrian kendaraan di simpang barat P1.4 Selektor mux pada rangkaian pendeteksi antrian kendaraan P1.5 Selektor mux pada rangkaian pendeteksi antrian kendaraan P1.6 Tidak digunakan
P1.7 Tidak digunakan
P2
P2.0 Menerimakan Input dari sub unit kendali palang dan alarm kereta api P2.1 Memberikan output lampu merah arah ke utara pada simpang timur P2.2 Memberikan output lampu merah arah ke utara pada simpang selatan P2.3 Memberikan output lampu merah arah ke utara barat
P2.4 Memberikan output lampu merah simpang utara P2.5 Memberikan output lampu merah simpang timur P2.6 Memberikan output lampu merah simpang selatan P2.7 Memberikan output lampu merah simpang barat
P3
P3.0 Menerima input frekuensi low dari sensor sirine di simpang utara P3.1 Menerima input frekuensi high dari sensor sirine di simpang utara P3.2 Menerima input frekuensi low dari sensor sirine di simpang timur P3.3 Menerima input frekuensi high dari sensor sirine di simpang timur P3.4 Menerima input frekuensi low dari sensor sirine di simpang selatan P3.5 Menerima input frekuensi high dari sensor sirine di simpang selatan P3.6 Menerima input frekuensi low dari sensor sirine di simpang barat P3.7 Menerima input frekuensi high dari sensor sirine di simpang barat
3.1.2.1 Unit Kendali Lampu Lalu Lintas
a. RST (kaki 9). Mikrokontroler direset pada transisi tegangan rendah ke tegangan tinggi. Oleh karena itu pada kaki RST dipasang kapasitor yang 8terhubung ke Vcc dan Resistor yang terhubung ke Ground yang akan menjaga RST bernilai ‘1’ pada saat pengisian kapasitor dan bernilai ‘0’ sesaat kemudian. Dengan demikian mikrokontroler akan direset setiap pertama kali diberi catu daya. Mikrokontroler juga dilengkapi dengan tombol reset yang akan memberikan tegangan logika tinggi untuk me-reset mikrokontroler.
b. EA/VPP (kaki 31). Diberi logika tinggi untuk menandakan bahwa implementasi dalam mikrokontroler menggunakan RAM internal selama waktu eksekusi.
c. Port 1 (kaki 1 s.d. kaki 8). Kaki P1.0 sampai P1.5 pada mikrokontroler
digunakan sebagai penerima masukan dan selektor dari rangkaian pendeteksi antrian kendaraan. Kaki P1.0 sampai P1.3 merupakan penerima masukan untuk memberikan interupsi nyalanya lampu hijau, sedangkan P1.4 sampai P1.5 merupakan selector untuk rangakaian pendeteksi antrian kendaraan.. d. Port 3 (kaki 10 s.d. kaki 17). Kaki P3.0 sampai P3.7 digunakan sebagai
penerima masukan dari rangkaian sensor pendeteksi sirine.
e. Port 0 (kaki 32 s.d. kaki 39). Port ini merupakan port keluaran yang
kemudian informasinya dikirim ke lampu lalu-lintas. Sehingga lampu dapat dikendalikan melalui port ini.
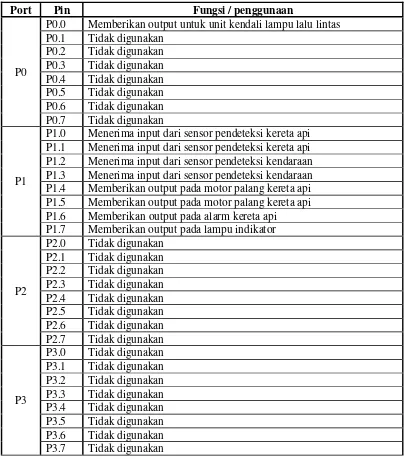
Tabel 3.2 Port (pin) mikrokontroler untuk unit kendali palang dan alarm kereta api Port Pin Fungsi / penggunaan
P0
P0.0 Memberikan output untuk unit kendali lampu lalu lintas P0.1 Tidak digunakan
P0.2 Tidak digunakan P0.3 Tidak digunakan P0.4 Tidak digunakan P0.5 Tidak digunakan P0.6 Tidak digunakan P0.7 Tidak digunakan
P1
P1.0 Menerima input dari sensor pendeteksi kereta api P1.1 Menerima input dari sensor pendeteksi kereta api P1.2 Menerima input dari sensor pendeteksi kendaraan P1.3 Menerima input dari sensor pendeteksi kendaraan P1.4 Memberikan output pada motor palang kereta api P1.5 Memberikan output pada motor palang kereta api P1.6 Memberikan output pada alarm kereta api
P1.7 Memberikan output pada lampu indikator
P2
P2.0 Tidak digunakan P2.1 Tidak digunakan P2.2 Tidak digunakan P2.3 Tidak digunakan P2.4 Tidak digunakan P2.5 Tidak digunakan P2.6 Tidak digunakan P2.7 Tidak digunakan
P3
P3.0 Tidak digunakan P3.1 Tidak digunakan P3.2 Tidak digunakan P3.3 Tidak digunakan P3.4 Tidak digunakan P3.5 Tidak digunakan P3.6 Tidak digunakan P3.7 Tidak digunakan
3.1.2.2 Unit Kendali Palang dan Alarm Kereta Api
Bagian ini digunakan untuk menerima masukan dari sensor yang mendeteksi kereta api seperti yang ditunjukkan pada Tabel 3.2. Pin-pin yang digunakan adalah:
RST bernilai ‘1’ pada saat pengisian kapasitor dan bernilai ‘0’ sesaat kemudian. Dengan demikian mikrokontroler akan direset setiap pertama kali diberi catu daya. Mikrokontroler juga dilengkapi dengan tombol reset yang akan memberikan tegangan logika tinggi untuk me-reset mikrokontroler.
b. EA/VPP (kaki 31). Diberi logika tinggi untuk menandakan bahwa implementasi dalam mikrokontroler menggunakan RAM internal selama waktu eksekusi.
c. Port 1 (kaki 1 sampai kaki 7). Kaki P1.0 digunakan untuk menerima
masukan dari sensor pertama. Sedangkan kaki P1.1 digunakan untuk menerima masukan dari sensor kedua. Kaki P1.2 dan P1.3 digunakan untuk menerima masukan dari sensor kendaraan yang ada dekat jalur kereta api. Kaki P1.4 dan P1.5 digunakan untuk menggerakkan motor palang pintu kereta api. Kaki P1.6 digunakan untuk menyalakankan alarm jika ada kereta api. Kaki P1.7 digunakan untuk menyalakan lampu indikator.
d. Port 0 (kaki 32 sampai kaki 39). Kaki P0.0 sebagai pengirim informasi ke
3.2 Perancangan Perangkat Lunak
B
S
T U
Keterangan:
= Lampu lalu lintas = Palang kereta api = Sensor kendaraan pada
palang pintu KA
= Sensor antrian kendaraan = Sensor kendaraan bersirine = Sensor kereta api
Untuk membuat perangkat lunak pengendalian utama sistem prioritas lampu lalu lintas mengacu pada model yang ditunjukkan Gambar 3.3.
3.2.1 Program Pengendali Kendali Lampu Lalu Lintas
Program pengendali lampu lalu lintas merupakan bagian yang utama pada unit kendali ini, dimana program pengendali utama ini berfungsi mengatur informasi pada sistem prioritas dan mengatur nyala dan matinya lampu lalu-lintas.
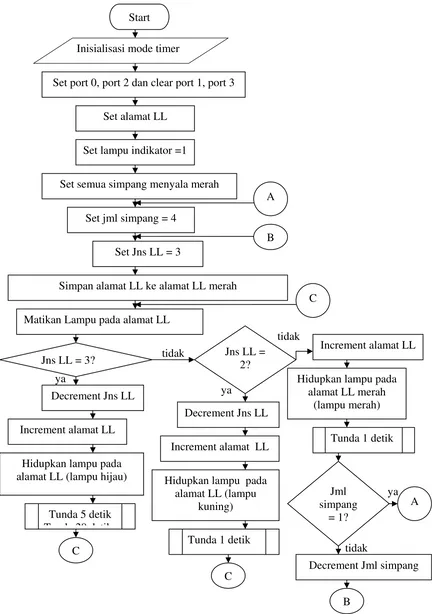
3.2.1.1 Program Penyalaan Lampu Lalu-Lintas Untuk Status Normal
Penyalaan lampu lalu-lintas untuk sistem prioritas ini pada status normal hanya boleh sebuah lampu hijau atau lampu kuning yang menyala, sementara persimpangan lainnya menyala lampu merah. Seperti yang ditunjukkan Tabel 3.3. Hal ini dilakukan secara bergantian sesuai dengan urutannya. Untuk keadaan awal atau reset semua node persimpangan lampu lalu-lintas menyala lampu merah. Program reset ini mengaktifkan lampu-lampu yang terletak pada pin P2.4, P2.5, P2.6, P2.7. Pin-pin tersebut adalah pin-pin untuk lampu merah.
Setelah melakukan inisialisasi dan reset serta memberi masukan 1 pada lampu indikator agar mati, mikrokontroler akan mematikan lampu pada isi alamat LL yaitu dengan memberikan masukan 0. Sebelumnya alamat LL diubah terlebih dahulu dengan alamat P0.0. Begitu juga untuk menghidupkan lampu berikutnya program akan memberikan masukan 1 pada isi alamat LL.
program akan kembali menghidupkan lampu awal tadi seperti yang ditunjukkan oleh Gambar 3.4.
Tabel 3.3 Penyalaan lampu lalu lintas untuk status normal Lampu
Hijau Kuning Merah Utara Hidup Mati Mati
Simpang utara menyala lampu hijau selama 5 detik Timur Mati Mati Hidup
Selatan Mati Mati Hidup Barat Mati Mati Hidup Utara Mati Hidup Mati
Simpang utara menyala lampu kuning selama 1 detik
Timur Mati Mati Hidup Selatan Mati Mati Hidup
Barat Mati Mati Hidup Utara Mati Mati Hidup
Simpang timur menyala lampu hijau selama 5 detik Timur Hidup Mati Mati
Selatan Mati Mati Hidup Barat Mati Mati Hidup Utara Mati Mati Hidup
Simpang timur menyala lampu kuning selama 1 detik
Timur Mati Hidup Mati Selatan Mati Mati Hidup Barat Mati Mati Hidup Utara Mati Mati Hidup
Simpang selatan menyala lampu hijau selama 5 detik Timur Mati Mati Hidup
Selatan Hidup Mati Mati Barat Mati Mati Hidup Utara Mati Mati Hidup
Simpang selatan menyala lampu kuning selama 1 detik
Timur Mati Mati Hidup Selatan Mati Hidup Mati
Barat Mati Mati Hidup Utara Mati Mati Hidup
Simpang selatan menyala lampu hijau selama 5 detik Timur Mati Mati Hidup
Selatan Mati Mati Hidup Barat Hidup Mati Mati Utara Mati Mati Hidup
Simpang barat menyala lampu kuning selama 1 detik
Timur Mati Mati Hidup Selatan Mati Mati Hidup
Inisialisasi mode timer
Set alamat LL
Set jml simpang = 4
Set Jns LL = 3
Simpan alamat LL ke alamat LL merah
Jns LL = 3?
Matikan Lampu pada alamat LL
Decrement Jns LL
Hidupkan lampu pada alamat LL (lampu hijau)
Increment alamat LL
Jns LL = 2?
Hidupkan lampu pada alamat LL merah
(lampu merah)
Increment alamat LL
Jml simpang
= 1?
Decrement Jml simpang Set semua simpang menyala merah
Decrement Jns LL
Hidupkan lampu pada alamat LL (lampu
kuning)
Increment alamat LL
C
C
B B
A
A C
Start
tidak
tidak
tidak ya
ya Set lampu indikator =1
Tunda 5 detik T d 20 d tik
Tunda 1 detik
Tunda 1 detik
ya Set port 0, port 2 dan clear port 1, port 3
Inisialisasi mode timer Start
Utara hijau?
tidak
Gambar 3.5 Diagram pengecekan informasi sistem prioritas lampu lalu-lintas ya
Utara menyala lampu hijau
Cek Kereta Api
Cek Kendaraan Sirine
Cek Kendaraan arah timur
Timur hijau?
tidak ya
Timur menyala lampu hijau
Cek Kereta Api
Cek Kendaraan Sirine
Cek Kendaraan arah selatan
A
B
Selatan hijau?
tidak ya
Selatan menyala lampu hijau
Cek Kereta Api
Cek Kendaraan Sirine
Cek Kendaraan arah barat
Barat hijau?
tidak ya
Barat menyala lampu hijau
Cek Kereta Api
Cek Kendaraan Sirine
Cek Kendaraan arah utara B
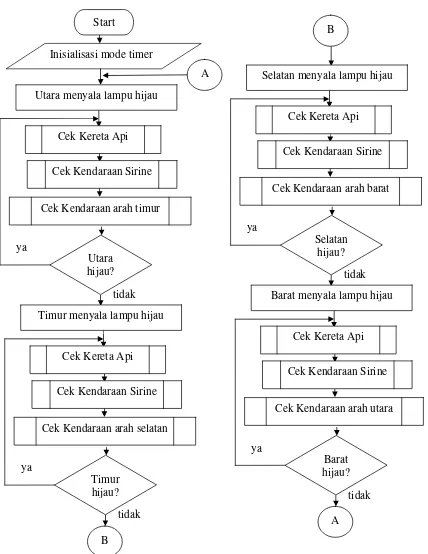
3.2.1.2 Program Utama Penyalaan Lampu Lalu-Lintas Untuk Status Prioritas
Informasi
Adanya informasi dari hasil deteksi sensor ini menyebabkan lampu lalu-lintas menyala tidak sesuai dengan siklusnya pada status normal, tetapi akan menyala sesuai informasi ( perintah ) yang ada. Seperti yang ditunjukkan pada Gambar 3.5. Penyalaan lampu lalu-lintas untuk status ter-interupsi sebelumnya dilakukan pengecekan informasi interupsi terlebih dahulu. Pengecekan interupsi dilakukan secara otomatis setiap 1 detik dengan meletakkan intruksi pengecekan setelah rutin tunda 1 detik. Pengecekan ini dilakukan berurutan sesuai dengan urutan prioritas informasi. Adapun prioritas input (masukan) tersebut adalah :
1. Prioritas informasi kereta api
2. Prioritas informasi kendaraan ber-sirine 3. Prioritas informasi antrian panjang kendaraan
Setelah melakukan pengecekan dan prioritasan informasi maka program mikrokontroler akan menjalankan informasi tersebut. Pelaksanaan infromasi dilakukan langsung tanpa harus menunggu intruksi selanjutnya pada program status normal. Sebelum menjalankan informasi mikrokontroler akan menyimpan data dari penyalaan lampu lalu-lintas untuk status normal terlebih dahulu. Hal ini dilakukan agar setelah menjalankan informasi lampu lalu-lintas dapat menyala kembali dalam keadaan terakhir status normal yang telah disimpan. Penyalaan lampu lalu-lintas dilakukan berdasarkan informasi yang didapat. Pelaksanaan informasi penyalaan lampu lalu-lintas adalah sebagai berikut :
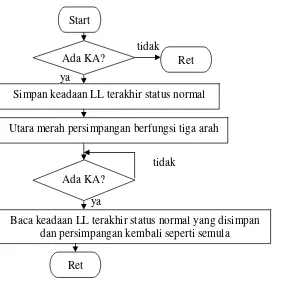
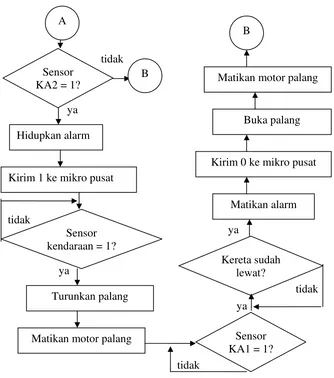
1. Pelaksanaan prioritas informasi kereta api
kemudian mengirim data ke pin-pin lampu merah sehingga semua persimpangan lampu lalu-lintas akan menyala merah. Setelah P.2.0 bernilai 0 maka mikrokontroler akan membaca data keadaan LL terakhir yang disimpan tadi sehingga lampu lalu-lintas akan kembali menyala pada status normal. Untuk diagram alir program dapat dilihat pada Gambar 3.7a dan 3.7b.
Ada KA?
Utara merah persimpangan berfungsi tiga arah Simpan keadaan LL terakhir status normal
Ada KA?
Baca keadaan LL terakhir status normal yang disimpan dan persimpangan kembali seperti semula
Gambar 3.6 Diagram blok pengecekan informasi kereta api Start
ya
tidak
tidak
ya
Ret
Start
Hidupkan lampu indicator
Sensor KA1 = 1?
Sensor KA2 = 1? Sensor
kendaraan = 1? Hidupkan alarm
Kirim 1 ke mikro pusat
Turunkan palang
Matikan motor palang
Kereta sudah lewat?
Matikan alarm Kirim 0 ke mikro pusat
Buka palang A
Matikan motor palang B
B
ya
ya
ya ya tidak
tidak
tidak
tidak
2. Pelaksanaan prioritas informasi kendaraan bersirine
Seperti yang ditunjukkan oleh Gambar 3.8 dan Tabel 3.4a hingga Tabel 3.4d. Apabila pada P3 terdapat masukan (informasi), maka program akan menyimpan keadaan LL terakhir pada status normal dan kemudian menyalakan lampu hijau sesuai informasi yang diterima. Misalkan informasi yang didapat berasal dari arah persimpangan utara, maka mikrokontroler mengirim data ke port lampu hijau yang ada di persimpangan utara agar menyala. Setelah kendaraan bersirine melewati persimpangan lainnya selain utara, maka mikrokontroler menghapus kembali data yang ada pada port
Sensor KA2 = 1?
Sensor KA1 = 1? Sensor
kendaraan = 1? Hidupkan alarm
Kirim 1 ke mikro pusat
Turunkan palang
Matikan motor palang
Kereta sudah lewat?
Matikan alarm Kirim 0 ke mikro pusat
Buka palang A
Matikan motor palang B
B
ya ya
ya ya tidak
tidak
tidak
tidak
lampu hijau di utara sehingga lampu mati dan lampu lalu-lintas akan menyala pada status normal kembali. Untuk diagram alir program dapat dilihat pada Gambar 3.9
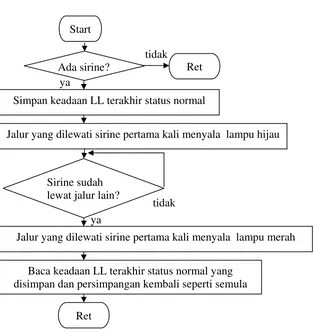
Sirine sudah lewat jalur lain?
Jalur yang dilewati sirine pertama kali menyala lampu hijau Ada sirine?
Baca keadaan LL terakhir status normal yang disimpan dan persimpangan kembali seperti semula
Gambar 3.8 Diagram pengecekan informasi kendaraan sirine Start
ya
tidak
tidak ya
Ret
Simpan keadaan LL terakhir status normal
Start
Gambar 3.9 Diagram alir program pengecekan informasi kendaraaan bersirine Ada
Sirine?
Isi alamat deteksi sensor = 1?
Inc alamat deteksi sensor
Isi alamat deteksi sensor = 1?
Jml simpang
= 1? Inc alamat deteksi sensor
Dec jml simpang
Sensor = 0
Sensor = 1
Inc alamat deteksi sensor
Pengecekan informasi lain
Sudah simpan keadaan LL
terakhir? Simpan keadaan LL terakhir status normal
LL semua menyala merah
Nyalakan LL hijau pada simpang
LL semua menyala merah
Baca simpan keadaan LL terakhir status normal
Tunda waktu
Tabel 3.4.a Input/output prioritas informasi kendaraan sirine untuk simpang utara
Simpang Sensor Lampu Keterangan Hijau Kuning Merah
Utara Mendeteksi Hidup Mati Mati
Kendaraan sirine datang ke arah utara, maka lampu utara menyala hijau.
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Mati Hidup Mati
Kendaraan sirine telah melewati arah utara, maka lampu utara menyala kuning
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Mati Mati Hidup K Kendaraan sirine telah melewati simpang lainnya setelah utara, keadaan kembali ke status normal
Timur Mendeteksi Mati Mati Hidup
Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Mati Mati Hidup Kendaraan sirine telah melewati simpang lainnya setelah utara, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Mendeteksi Mati Mati Hidup
Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Mati Mati Hidup Kendaraan sirine telah melewati simpang lainnya setelah utara, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Mati Mati Hidup
Tabel 3.4.b Input/output prioritas informasi kendaraan sirine untuk simpang timur
Simpang Sensor Lampu Keterangan Hijau Kuning Merah
Utara Tidak
mendeteksi Mati Mati Hidup
Kendaraan sirine datang ke arah timur, maka lampu timur menyala hijau.
Timur Mendeteksi Hidup Mati Mati Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Mati Mati Mati
Kendaraan sirine telah melewati arah timur, maka lampu timur menyala kuning
Timur Tidak
mendeteksi Mati Hidup Mati Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Mati Mati Hidup
Utara Mendeteksi Mati Mati Hidup
Kendaraan sirine telah melewati simpang lainnya setelah timur, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Hidup Mati Mati Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Mati Mati Hidup Kendaraan sirine telah melewati simpang lainnya setelah timur, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Mendeteksi Hidup Mati Mati
Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Mati Mati Hidup Kendaraan sirine telah melewati simpang lainnya setelah timur, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Hidup Mati Mati
Tabel 3.4.c Input/output prioritas informasi kendaraan sirine untuk simpang selatan
Simpang Sensor Lampu Keterangan Hijau Kuning Merah
Utara Tidak
mendeteksi Mati Mati Hidup
Kendaraan sirine datang ke arah selatan, maka lampu selatan menyala hijau.
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Mendeteksi Hidup Mati Mati
Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Mati Mati Hidup
Kendaraan sirine telah melewati arah selatan, maka lampu selatan menyala kuning.
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Mati Hidup Mati Barat Tidak
mendeteksi Mati Mati Hidup
Utara Mendeteksi Mati Mati Hidup
Kendaraan sirine telah melewati simpang lainnya setelah selatan, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Hidup Mati Mati Utara Tidak
mendeteksi Mati Mati Hidup Kendaraan sirine telah melewati simpang lainnya setelah selatan, keadaan kembali ke status normal
Timur Mendeteksi Mati Mati Hidup
Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Hidup Mati Mati Utara Tidak
mendeteksi Mati Mati Hidup Kendaraan sirine telah melewati simpang lainnya setelah selatan, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
Tabel 3.4.d Input/output prioritas informasi kendaraan sirine untuk simpang barat Lampu
Hijau Kuning Merah Utara Tidak
mendeteksi Mati Mati Hidup
Kendaraan sirine datang ke arah barat, maka lampu barat menyala hijau.
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Mati Mati Hidup Barat Mendeteksi Hidup Mati Mati Utara Tidak
mendeteksi Mati Mati Hidup
Kendaraan sirine telah melewati arah barat, maka lampu barat menyala kuning.
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Mati Hidup Mati Utara Mendeteksi Hidup Mati Mati
Kendaraan sirine telah melewati simpang lainnya setelah barat, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Hidup Mati Mati Kendaraan sirine telah melewati simpang lainnya setelah barat, keadaan kembali ke status normal
Timur Mendeteksi Mati Mati Hidup
Selatan Tidak
mendeteksi Mati Mati Hidup Barat Tidak
mendeteksi Mati Mati Hidup Utara Tidak
mendeteksi Hidup Mati Mati Kendaraan sirine telah melewati simpang lainnya setelah barat, keadaan kembali ke status normal
Timur Tidak
mendeteksi Mati Mati Hidup Selatan Mendeteksi Mati Mati Hidup
Barat Tidak
3. Pelaksanaan prioritas informasi antrian kendaraan
Seperti yang ditunjukkan pada Gambar 3.10 dan Tabel 3.5. Apabila pada P1 terdapat masukan (infomasi), maka program akan memberi waktu tambahan untuk lampu hijau sesuai informasi yang diterima. Misalkan pada persimpangan jalan bagian selatan antrian kendaraan lebih panjang dari persimpangan lainnya maka persimpangan jalan dari arah selatan yang lebih diprioritaskan untuk menyala lampu hijau. Selain itu lampu hijau yang menyala bisa mendapatkan waktu tunda yang lebih lama dibandingkan waktu tunda dari status normal. Waktu tunda tambahan ini terjadi jika seiring dengan pendeteksian antrian kendaraan pada persimpangan tersebut. Untuk diagram alir program dapat dilihat pada gambar 3.11.
Sensor1?
Gambar 3.10 Diagram pengecekan informasi antrian kendaraan Start
ya
tidak
Ret
Tunda waktu 5 detik
Sensor2?
Sensor3? ya
ya
tidak Tunda waktu 5 detik
tidak Tunda waktu 10detik
Sensor3? ya
tidak
Tunda waktu 15 detik
Tunda waktu 20 detik
Ada Antrian?
Start
Isi alamat simpang
=1?
Simpan keadaan LL terakhir
LL semua menyala merah
Nyalakan LL hijau pada simpang
Isi alamat tambah waktu = 1?
Inc alamat tambah waktu Inc alamat simpang
Isi alamat tambah waktu = 1? Inc alamat tambah waktu
Isi alamat tambah waktu = 1?
+ tunda waktu 5 detik
+ tunda waktu 10 detik + tunda waktu
15 detik + tunda waktu 20 detik
Set antrian, alamat simpang, alamat tambah waktu
ya
Pengecekan informasi lain tidak
tidak
tidak tidak
tidak
ya
ya
ya
ya
Tabel 3.5 Input/output prioritas informasi antrian kendaraan
Simpang
Sensor
(ya = mendeteksi, tidak = tidak mendeteksi)
Keterangan penyalaan waktu tunda lampu hijau
1 2 3 4
Utara
Tidak Tidak Tidak Tidak 5 detik
Ya Tidak Tidak Tidak 5 detik
Ya Ya Tidak Tidak 10 detik
Ya Ya Ya Tidak 15 detik
Ya Ya Ya Ya 20 detik
Timur
Tidak Tidak Tidak Tidak 5 detik
Ya Tidak Tidak Tidak 5 detik
Ya Ya Tidak Tidak 10 detik
Ya Ya Ya Tidak 15 detik
Ya Ya Ya Ya 20 detik
Selatan
Tidak Tidak Tidak Tidak 5 detik
Ya Tidak Tidak Tidak 5 detik
Ya Ya Tidak Tidak 10 detik
Ya Ya Ya Tidak 15 detik
Ya Ya Ya Ya 20 detik
Barat
Tidak Tidak Tidak Tidak 5 detik
Ya Tidak Tidak Tidak 5 detik
Ya Ya Tidak Tidak 10 detik
Ya Ya Ya Tidak 15 detik
Ya Ya Ya Ya 20 detik
Sewaktu sedang menjalankan prioritas informasi apabila ada prioritas informasi yang lebih tinggi maka program akan menghentikan prioritas informasi yang lebih rendah dan menjalankan prioritas informasi yang lebih tinggi. Setelah menjalankan prioritas informasi program akan mengambil data penyalaan lampu status normal yang disimpan sebelum melakukan prioritas informasi tadi untuk dijalankan kembali seperti keadaan terakhir dari penyalaan lampu pada status normal tersebut.
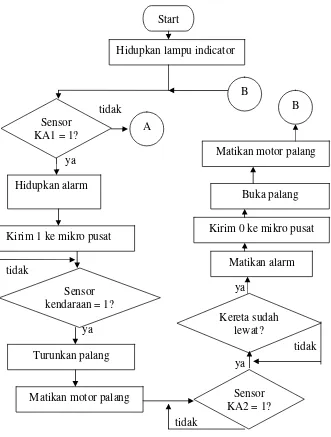
3.2.2 Program Kendali Palang Dan Alarm Kereta Api
Pada saat kereta api datang maka sensor akan mengirim sinyal ke unit kendali palang dan alarm kereta api yang kemudian program akan mengolah sinyal tersebut untuk menyalakan alarm kereta bahwa ada kereta datang dan untuk dikirim berupa prioritas informasi ke unit kendali lampu lalu lintas. Setelah kereta api lewat maka sensor akan mengirim sinyal kembali ke unit kendali palang dan alarm kereta api yang kemudian diolah program dan dikirim lagi ke unit kendali lampu lalu lintas. Dimana informasi kereta api yang dikirim ke unit kendali lampu lalu lintas merupakan prioritas informasi utama dibanding piroritas informasi lainnya. Seperti yang ditunjukkan oleh Gambar 3.12 dan Tabel 3.6.
Tabel 3.6 Input/output prioritas informasi kereta api Sensor yang
mendeteksi Palang ke 1 kereta api
Palang ke 2
kereta api Keterangan 1 2 3 4
0 0 0 0 Terbuka Terbuka Tidak ada kereta api 0 0 0 1 Terbuka Terbuka Tidak ada kereta api 0 0 1 0 Terbuka Terbuka Tidak ada kereta api 0 0 1 1 Terbuka Terbuka Tidak ada kereta api 0 1 0 0 Tertutup Tertutup Ada kereta api
0 1 0 1 Terbuka Terbuka Ada kereta api, ada kendaraan 0 1 1 0 Terbuka Terbuka Ada kereta api, ada kendaraan 0 1 1 1 Terbuka Terbuka Ada kereta api, ada kendaraan 1 0 0 0 Tertutup Tertutup Ada kereta api
1 0 0 1 Terbuka Terbuka Ada kereta api, ada kendaraan 1 0 1 0 Terbuka Terbuka Ada kereta api, ada kendaraan 1 0 1 1 Terbuka Terbuka Ada kereta api, ada kendaraan 1 1 0 0 Tertutup Tertutup Ada kereta api
1 1 0 1 Terbuka Terbuka Ada kereta api, ada kendaraan 1 1 1 0 Terbuka Terbuka Ada kereta api, ada kendaraan 1 1 1 1 Terbuka Terbuka Ada kereta api, ada kendaraan
3.2.3 Tunda Waktu
Pada mikrokontroler AT89S51 untuk pembuatan tunda dapat dilakukan dengan menggunakan timer. Mode yang digunakan pada tunda waktu pada program ini yaitu mode 2 Timer (8-bit auto reload) dengan mengatur M1 = 1 dan M0 = 0.
Tutup Palang KA Ada
KA?
Buka Palang KA Start
ya tidak
Isi alamat sensor = 1?
Kirim instruksi kereta datang ke kendali utama
Isi alamat sensor = 1?
Isi alamat sensor = 1?
Kirim instruksi kereta datang ke kendali utama Inc alamat sensor
tidak ya
ya ya
tidak
tidak
Set port 0, port 2 dan clear port 1, port 3
Dimana TLx dipakai sebagai pencacah biner 8 bit, sedangkan THx dipakai untuk menyimpan nilai yang diisikan ulang ke TLx setiap kali kondisi TLX melimpah (overflow) atau berubah dari FFh menjadi 00h.
Pada diagram alir gambar terdapat tunda waktu 20 detik, 15 detik, 10 detik, 5 detik, 1 detik. Semua tunda waktu tersebut dibuat dengan memanfaatkan tunda waktu 1 detik. Adapun tunda waktu yang dibuat dengan perhitungannya sebagai berikut:
Pengerjaaan Siklus
. . .
mov r0, #10 1x 1 tunda1: mov r1, #181 10x 1 tunda2: mov r2, #253 181x10x 1 djnz r2, $ 253x181x10x 2 djnz r1, tunda2 181x10x 2 djnz r0, tunda1 10x 2 . . .
Dapat dilihat bahwa untuk mengerjakan 6 baris instruksi di atas dibutuhkan: (253 x 181 x 10 x 2 ) + (181 x 10 x 3) + (10 x 3) + 1 = 921.321 siklus. Untuk mengerjakan 1 siklus dibutuhkan waktu 12 periode osilator. Dalam perancangan digunakan osilator kristal 11,059 MHz, maka untuk mengerjakan 1 siklus dibutuhkan waktu 12 / (11,059 x 106) = 1,085 µd. Dengan demikian untuk mengerjakan 6 instruksi di atas dibutuhkan 921.321 x 1,085 µd = 999.633,285 µd, yang merupakan suatu nilai yang amat mendekati 1 detik seperti yang diinginkan.
Start Set lama = 20
Tunda 1 detik & cek prioritas
informasi
Dec lama
Lama = 0?
End Tambah
tunda waktu?
Set lama
Start
Set lama = 15
Lama = 0?
End Tambah
tunda waktu?
Set lama tidak tidak
tidak tidak
ya ya
ya ya
Tunda 1 detik & cek prioritas
informasi
Dec lama
Gambar 3.13.aDiagram alir waktu tunda
Start
Set lama = 10
Lama = 0?
End Tambah
tunda waktu?
Set lama tidak
tidak ya
ya Tunda 1 detik & cek prioritas
informasi
Start Set lama = 5
Tunda 1 detik & cek prioritas
informasi
Dec lama
Lama = 0?
End Tambah
tunda waktu?
Set lama
Start
Set lama = 1
Lama = 0?
End Tambah
tunda waktu?
Set lama tidak tidak
tidak tidak
ya ya
ya ya
Tunda 1 detik & cek prioritas
informasi
Dec lama
38 BAB IV
HASIL DAN PEMBAHASAN
Perancangan alat berbasis mikrokontroler AT89S51 dapat bekerja sesuai yang diharapkan apabila didalamnya terdapat perangkat lunak (software). Pada bagian ini akan membahas perangkat lunak yang dibuat untuk menjawab rumusan masalah.
Perangakat lunak yang dibuat mengacu pada diagram alir (flow chart) yang dirancang pada bab 3.
4.1Program Utama
Pada unit kendali 1 terdapat program utama dan beberapa program subrutin pelayanan prioritas kendaraan. Program utama terdiri dari program inisialisasi dan pemanggilan subrutin untuk memproses masukan sehingga dapat menjalankan keseluruhan program.
untuk menentukan jenis lampu yang akan dinyalakan. Pada saat akan menyala lampu hijau program memanggil subrutin antrian kendaraan pada baris ke 28, 70, 107, 144. Jika ada antrian kendaraan yaitu register 7 bernilai logika 1 maka program akan lompat dari baris 29 ke 31, 71 ke 73, 108 ke 110, 143 ke 145. Sedangkan apabila tidak ada antrian maka program akan memberikan penyalaan lampu hijau selama 5 detik pada pin-pin lampu hijau yaitu pada baris 30 – 36 (P0.0 untuk jalur utara), 72 – 84 (P0.2 untuk pin jalur timur), 109 – 115 (P0.4 untuk pin jalur selatan), 144 - 150 (P0.6 untuk pin jalur barat) yang sebelumnya mematikan lampu merah pada persimpangan yang akan dinyalakan lampu hijau.
Setelah itu program akan mematikan lampu hijau terlebih dahulu dengan memberikan logika 0 pada pin lampu hijau tersebut, kemudian pada persimpangan yang akan dinyalakan lampu kuning selama 2 detik diberikan logika 1 untuk pin-pin lampu kuning. Program penyalan lampu kuning terdapat pada baris 38 – 45 (P0.1 untuk pin jalur utara), 74 – 81 (P0.3 untuk pin jalur timur), 117 - 124 (P0.5 untuk pin jalur selatan), 145 -152 (P0.7 untuk pin jalur barat). Begitu juga dengan program untuk menyalakan lampu merah yang terdapat pada baris 47 – 62 (P2.7 untuk pin jalur utara), 89 – 99 (P2.6 untuk pin jalur timur), 126 – 136 (P2.5 untuk pin jalur selatan),163 – 173 (P2.4 untuk pin jalur barat). Pada program utama ini looping terjadi akibat pengurangan register 4 yang digunakan untuk memberikan jumlah waktu penyalaan lampu. Program looping ini terdapat pada baris 35 – 36, 44 – 45, 57 -58, 77 – 78, 86 – 87, 97 – 98, 114 - 115, 123 -124, 134 - 135, 151 – 152, 160 – 161, 171 - 172. Sedangkan
4.2Program subrutin pengecekan informasi
Sebelum memasuki program subrutin prioritas terlebih dahulu jalannya program akan melewati pada subrutin pengecekan informasi.
Untuk lampiran listing program pada baris ke 176 merupakan pengecekan pin P2.0 sebagai masukan data dari kereta api. Jika P2.0 bernilai 1 maka program akan memanggil subrutin informasi kereta api seperti pada baris 177, tetapi jika P2.0 bernilai 0 maka program akan lompat ke baris 179. Dimana baris 179 sampai 183 program berujuan untuk mematikan lampu merah ke arah utara serta menset ulang alamat/register apabia kereta api sudah lewat ataupun tidak ada kereta yaitu pada saat P2.0 bernilai 0. Setelah dilakukan pengecekan masukan kereta api kemudian program mengecek prioritas selanjutnya yaitu kendaraan bersirine pada port 3, seperti yang ditunjukkan pada baris 185 sampe 188.
Begitu juga pada program baris 191 sampai 199 sama dengan program pengecekan sebelumnya. Hanya yang membedakannya adalah pengecekan informasi khusus ini berlaku saat lampu hijau pada jalur yang dilewati pertama kali oleh kendaraan sirine tersebut.
4.3Program informasi kereta api
Pada bagian mempunyai 2 program pada mikrokontroler yang berbeda. Dimana program informasi kereta api pada mikrokontroler utama inputnya berasal dari mikrokontroller lainnya, tidak langsung dari output sensor kereta api. Pembuatan program ini mengacu pada perancangan Bab 3.
akumulator yang kemudian di akumulator diperiksa nilainya seperti yang ditunjukkan pada baris 203. Jika akumulator bernilai 1 berarti jalur simpang utara sudah menyala lampu merah sehingga program akan mengakhiri subrutin ini dengan melompat ke baris 230, pada saat itu ada kereta api yang terdeteksi oleh sensor maka pin P2.0 pasti bernilai 1. Tetapi jika isi akumulator bernilai 0 berarti jalur simpang belum menyala lampu merah, maka program akan berlanjut secara berurutan sampai baris ke 230. Baris 182 hingga 183 untuk menghidupkan lampu merah yang menunjukkan ke arah utara. Sedangkan baris 184 merupakan penanda bahwa jalur utara ada kereta dengan mengisi regrister 5 dengan logika 1. Program informasi kereta api pada mikrokontroler sekunder adalah sebagai berikut.
mikrokontroler utama (baris 46,75). Setelah mengirim data program akan membukakan palang kereta api (baris 47, 48, 76, 77).
4.4Program informasi kendaraan sirine
Program informasi kendaraan sirine ini merupakan prioritas yang kedua setelah prioritas kereta api.
Setelah program melewati subrutin pengecekan informasi kendaraan sirine jika ada kendaraan sirine yang terdeteksi pada port P3 maka program akan meneruskan ke subrutin kendaraan sirine.
Baris 233 hingga 238 pada lampiran listing program merupakan program pengecekan alamat-alamat penanda sirine, sedangkan baris 239 berfungsi jika pada jalur simpang utara ada kereta maka pengecekan masukan data pendeteksian suara untuk frekensi tinggi pada jalur utara diabaikan pada saat ada kendaraan sirine yang melintasi jalur utara pertama kali. Pada baris 240, 243, 245 dan 247 adalah program untuk menerima masukan data hasil pendeteksian sensor suara untuk frekuensi tinggi. Jika masukan frekuensi tinggi bernilai 1 maka program akan melanjutkan ke pengecekan masukan data hasil pendeteksian sensor suara untuk frekuensi rendah yaitu pada baris 253, 304, 354 dan 403. Alamat 20h sebagai penanda adanya sirine pada perempatan simpang, sedangkan alamat 21h, 22h, 23h, 24h sebagai penanda adanya sirine pada tiap jalur persimpangan. Alamat 27h merupakan penanda arah jalur simpang datangnya kendaraan sirine yang pertama kali dideteksi oleh sensor suara.
lampu hijau/kuning pada simapng lainnya dan menyalakan lampu hijau pada jalur simpang tersebut. Tetapi jika pada simpang tersebut sebelumnya telah lampu hijau maka penyalaan lampu hijau tersebut dipertahankan hingga kendaraan sirine melewati jalur simpang lainnya, kemudian program menyalakan lampu kuning dan seterusnya lampu merah pada jalur simpang yang menyala lampu hijau sebelumnya.
4.5Program informasi antrian kendaraan
Pada program informasi antian kendaraan ini tidak melewati subrutin pengecekan informasi. Pemanggilan subrutin antrian kendaraan yaitu pada saat akan menyalanya lampu hijau. Hal ini berguna untuk pengambilan data masukan dari keluaran sensor yang lebih akurat. Program subrutin antrian kendaraan selengkapnya sebagai berikut.
Pada program antrian kendaraan R6 digunakan sebagai penanda banyaknya sensor yang mendeteksi antrian kendaraan, sedangkan R7 berfungsi sebagai penanda tidak adanya antrian kendaraan.jika tidak ada kendaraan maka penyalaan lampu hijau sama dengan penyalaan hanya satu sensor yang terdeteksi yaitu 5 detik. Jika ada antrian kendaran yang terdeteksi oleh sensor maka R6 akan menghitung counter up. Penentuan lamanya penyalaan lampu hijau dipengaruhi oleh banyaknya sensor yang medeteksi antrian kendaraan.
Tabel 4.1 Penentuan sensor antrian kendaraan dengan selektor Selektor
Pin
00 01 10 11
P1.0 (utara) Sensor1 utara Sensor2 utara Sensor3 utara Sensor4 utara P1.1 (timur) Sensor1 timur Sensor2 timur Sensor3 timur Sensor4 timur P1.2 (selatan) Sensor1 selatan Sensor2 selatan Sensor3 selatan Sensor4 selatan
P1.3 (barat) Sensor1 barat Sensor2 barat Sensor3 barat Sensor4 barat
4.6Pengamatan Terhadap Waktu Tunda
Pengamatan terhadap waktu tunda nyala yang dikerjakan oleh mikrokontroler terhadap masukan pada transistor, sehingga mata manusia dapat melihat perbedaan antara nyala dan padam pada lampu. Waktu tundanya dapat diamati dengan osiloskop digital yang diambil dari kaki – kaki LED, sehingga didapatkan hasil seperti Gambar 4.1.
Gambar 4.1 Osiloskop Digital Pada Kaki LED
4.7Pengamatan Hasil Pengujian Program Pada Alat Dan Simulasinya
4.7.1 Pengamatan Sistem Prioritas Antrian Kendaraan
Tabel 4.2 Hasil Pengujian sistem prioritas antrian kendaraan untuk arah utara
Brs P0.0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P2.4 P2.5 P2.6 P2.7
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 1 0 0 0 0 0 0 0 1 0 0 0 0 0 1 1 1 0 3 1 0 0 0 0 0 0 0 1 0 0 0 0 1 1 1 1 0 4 1 0 0 0 0 0 0 0 1 0 0 0 1 0 1 1 1 0 5 1 0 0 0 0 0 0 0 1 0 0 0 1 1 1 1 1 0 6 0 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0
Pada tabel 4.2 baris kedua menunjukkan lampu hijau pada simpang utara menyala (P0.0 bernilai 1) selama 5 detik (P1.4 bernilai 0, P1.5 bernilai 0 yang merupakan selektor sensor sekaligus penentu waktu penyalaan lampu hijau), sedangkan lampu pada arah timur, selatan, barat menyala merah (P2.6, P2.5 dan P2.4 bernilai 1). Untuk hasil simulasinya sama dengan hasil pengujian, dimana pada saat lampu hijau di utara menyala (P0.0 bernilai 1) selama 5 detik (P1.4 bernilai 0, P1.5 bernilai 0) maka arah lainnnya menyala merah (P2.6, P2.5 dan P2.4 bernilai 1) seperti yang ditunjukkan pada Gambar 4.2. Hal ini sesuai dengan perancangan pada bab 3 Tabel 3.5.
Pada Tabel 4.2 baris ketiga menunjukkan lampu hijau pada simpang utara menyala (P0.0 bernilai 1) selama 10 detik (P1.4 bernilai 0, P1.5 bernilai 1 yang merupakan selektor sensor sekaligus penentu waktu penyalaan lampu hijau), sedangkan lampu pada arah timur, selatan, barat menyala merah (P2.6, P2.5 dan P2.4 bernilai 1). Untuk hasil simulasinya sama dengan hasil pengujian, dimana pada saat lampu hijau di utara menyala (P0.0 bernilai 1) selama 10 detik (P1.4 bernilai 0, P1.5 bernilai 1) maka arah lainnnya menyala merah (P2.6, P2.5 dan P2.4 bernilai 1) seperti yang ditunjukkan pada Gambar 4.3 . Hal ini sesuai dengan perancangan pada bab 3 Tabel 3.5.
Gambar 4.3 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 10 Detik Di Utara
selama 15 detik (P1.4 bernilai 1, P1.5 bernilai 0) maka arah lainnnya menyala merah (P2.6, P2.5 dan P2.4 bernilai 1) seperti yang ditunjukkan pada Gambar 4.4 . Hal ini sesuai dengan perancangan pada bab 3 Tabel 3.5.
Gambar 4.4 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 15 Detik Di Utara
Gambar 4.5 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 20 Detik Di Utara
Tabel 4.3 Hasil Pengujian sistem prioritas antrian kendaraan untuk arah timur
Brs P0.0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P2.4 P2.5 P2.6 P2.7
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 0 0 1 0 0 0 0 0 0 1 0 0 0 0 1 1 0 1 3 0 0 1 0 0 0 0 0 0 1 0 0 0 1 1 1 0 1 4 0 0 1 0 0 0 0 0 0 1 0 0 1 0 1 1 0 1 5 0 0 1 0 0 0 0 0 0 1 0 0 1 1 1 1 0 1 6 0 0 0 1 0 0 0 0 0 0 0 0 0 0 1 1 0 1
Gambar 4.6 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 5 Detik Di Timur
Gambar 4.7 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 10 Detik Di Timur
Gambar 4.8 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 15 Detik Di Timur
Gambar 4.9 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 20 Detik Di Timur
Tabel 4.4 Hasil Pengujian sistem prioritas antrian kendaraan untuk arah selatan
Brs P0.0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P2.4 P2.5 P2.6 P2.7
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 0 0 0 0 1 0 0 0 0 0 1 0 0 0 1 0 1 1 3 0 0 0 0 1 0 0 0 0 0 1 0 0 1 1 0 1 1 4 0 0 0 0 1 0 0 0 0 0 1 0 1 0 1 0 1 1 5 0 0 0 0 1 0 0 0 0 0 1 0 1 1 1 0 1 1 6 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 1 1
Gambar 4.10 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 5 Detik Di Selatan
Gambar 4.11 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 10 Detik Di Selatan
Gambar 4.12 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 15 Detik Di Selatan
Gambar 4.13 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 20 Detik Di Selatan
Tabel 4.5 Hasil Pengujian sistem prioritas antrian kendaraan untuk arah barat
Brs P0.0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P2.4 P2.5 P2.6 P2.7
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 1 0 0 0 0 1 0 0 0 1 1 1 3 0 0 0 0 0 0 1 0 0 0 0 1 0 1 0 1 1 1 4 0 0 0 0 0 0 1 0 0 0 0 1 1 0 0 1 1 1 5 0 0 0 0 0 0 1 0 0 0 0 1 1 1 0 1 1 1 6 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 1 1
Gambar 4.14 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 5 Detik Di Barat
Gambar 4.15 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 10 Detik Di Barat
Gambar 4.16 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 15 Detik Di Barat
Gambar 4.17 Simulasi Program Untuk Sistem Antrian Kendaraan Selama 20 Detik Di Barat
4.7.2 Pengamatan Sistem Prioritas Kendaraan Bersirine
Tabel 4.6 Hasil Pengujian sistem prioritas kendaraan bersirine untuk arah utara
Baris P0.0 P0.1 P2.4 P2.5 P2.6 P2.7 P3.0 P3.1 P3.2 P3.3 P3.4 P3.5 P3.6 P3.7
1 1 0 1 1 1 0 1 1 0 0 0 0 0 0 2 0 1 1 1 1 0 0 0 1 1 0 0 0 0
Gambar 4.18 Simulasi Program Sistem Kendaraan Sirine Datang Dari Arah Utara
Apabila kendaraan bersirine yang datang dari simpang utara kemudian terdeteksi oleh sensor melewati salah satu simpang lainnya (timur (P3.2dan P3.3) atau selatan (P3.4 danP3.5) ataupun barat (P3.6 dan P3.7) bernilai 1), maka lampu lalu lintas di utara akan menyala kuning (P0.1 bernilai 1) dan seterusnya merah (kembali ke status normal). Seperti yang ditunjukkan pada Tabel 4.6 pada baris kedua dan Gambar 4.19.
Gambar 4.19 Contoh Simulasi Program Sistem Kendaraan Sirine Datang Dari Arah Utara Dan Melewati Arah Timur
Tabel 4.7 Hasil Pengujian sistem prioritas kendaraan bersirine untuk arah timur
Baris P0.2 P0.3 P2.4 P2.5 P2.6 P2.7 P3.0 P3.1 P3.2 P3.3 P3.4 P3.5 P3.6 P3.7
1 1 0 1 1 0 1 0 0 1 1 0 0 0 0 2 0 1 1 1 0 1 1 1 0 0 0 0 0 0
Gambar 4.20 Simulasi Program Sistem Kendaraan Sirine Datang Dari Arah Timur Apabila kendaraan bersirine yang datang dari simpang