BALAI WILAYAH SUNGAI SULAWESI I
JL. MR. A.A. Maramis Kairai Dua. Telp / Fax (0431) 81161 ManadoPENGUKURAN
GPS GEODETIK
PENYUSUNAN PENILAIAN KINERJA DAN AKNOP
SUNGAI DI KAB. MINAHASA, KAB. MINAHASA
1
PENDAHULUAN
1.1 Latar Belakang
Di zaman modern ini, teknologi dan ilmu pengetahuan merupakan hal
yang semakin berkembang. Ilmu pengetahuan dan teknologi merupakan dua hal
yang dapat diperoleh melalui informasi, oleh sebab itu kebutuhan manusia
terhadap informasi semakin meningkat dari masa ke masa. Peningkatan kebutuhan
informasi menuntut adanya suatu sistem informasi yang terpadu memudahkan
manusia dalam memperoleh dan menafsirkannya. Jenis informasi yang
dibutuhkan sangat bervariasi misalkan informasi mengenai data dalam penelitian,
antropologis, data spasial dan sebagainya.
Dalam hal ini akan dikhususkan pembahasan mengenai informasi data
spasial. Informasi data spasial adalah salah satu contoh informasi yang memiliki
perananan sangat penting dalam kehidupan manusia. Data spasial adalah data
yang memiliki referensi ruang kebumian (
georeference
) dimana berbagai data
atribut terletak dalam berbagai unit spasial, informasi yang tercakup di dalamnya
adalah informasi mengenai posisi. Informasi data spasial ini biasanya dinyatakan
dalam bentuk peta. Dalam pengertian secara umum peta adalah gambaran
sebagian atau seluruh wilayah di permukaan bumi dengan berbagai
kenampakannya pada bidang datar yang diperkecil dengan menggunakan skala
tertentu. Sedangkan dalam penyusunan informasi data spasial diperlukan beberapa
metode yang salah satunya adalah proses pengukuran.
Pengukuran
Global Positioning System
dapat diaplikasikan dalam bidang
survei dan pemetaan terutama untuk menentukan penentuan posisi titik di
permukaan bumi yang nantinya akan berguna dalam penyusunan informasi data
spasial.
Global Positioning System
atau GPS adalah suatu sistem navigasi yang
berbasis pada satelit yang tersusun pada suatu jaringan yang terletak pada garis
edar bumi yang dilakukan oleh Departmen Pertahanan Amerika Serikat (Abidin,
H.Z, 2007). Penentuan posisi dengan menggunakan GPS dapat memberikan
koordinat titik-titik kontrol horisontal maupun vertikal dalam satu pengukuran.
2
refrensi Konstruksi yang terikat secara pemetaan nasional.
1.2 Tujuan
Adapun tujuan diadakannya pengukuran GPS Geodetik ini adalah:
1. Melakukan pengukuran GPS terhadap 8 lokasi BM yang tersebar di Kota
Bitung, Kabupaten Minahasa Utara, Minahasa Tenggara, dan Minahasa
yang akan digunakan sebagai referensi konstruksi di kemudian hari.
2.
Melakukan pengolahan data dan menyajikan hasilnya dalam bentuk
koordinat yang telah terikat secara nasional dengan BM BIG (Badan
Informasi Geospasial).
1.3 Manfaat
Adapun manfaat yang didapatkan dari pengukuran GPS Geodetik ini
adalah:
1. Mendapatkan koordinat titik-titik BM dan CP dari pengolahan data
pengamatan.
2. Terdaftarnya posisi bangunan asset BWSS 1 kelak dengan kondisi telah
terikat secara nasional.
1.4 Lingkup Pekerjaan
Adapun lingkup pekerjaan GPS Geodetik dalam pekerjaan ini antara
lain:
1. Pengamatan titik-titik yang akan diukur menggunakan alat GPS Geodetik
3
TINJAUAN PUSTAKA
2.1 Pengertian
2.1.1 GPS
GPS (
Global Positioning System
) adalah sistem satelit navigasi dan
penentuan posisi yang dimiliki dan dikelolah oleh Amerika Serikat. Nama
formalnya adalah NAVSTAR GPS, kependekan dari “Navigation Satellite Timing
and Ranging Global Positioning System”. Sistem ini didesain untuk memberikan
posisi dan kecepatan tiga dimensi serta informasi mengenai waktu, secara
kontinyu tanpa tergantung waktu dan cuaca. GPS didesain untuk memberikan
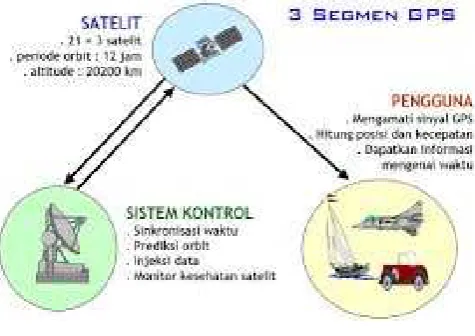
informasi posisi, kecepatan, dan waktu. Mempunyai 3 segmen, yaitu segmen
satelit, segmen pengontrol, dan segmen penerima/pengguna (Abidin,H.Z, 2007)
2.2 Dasar Teori
2.2.1 Segmen GPS
Pada dasarnya GPS terdiri atas tiga segmen utama dimana komponen
segmen tersebut dapat dilihat dalam Gambar 2.1, yaitu:
1. Segmen angkasa (
space segment
), terdiri dari satelit-satelit GPS serta
roket-roket Delta peluncur satelir dari Cape Canaveral di Florida, Amerika Serikat.
Satelit GPS dapat dianalogikan sebagai stasiun radio di angkasa, yang
dilengkapi dengan antena-antena untuk mengirim dan menerima sinyal-sinyal
gelombang. Yang kemudian sinyal-sinyal tersebut diterima oleh
Receiver
GPS di/dekat permukaan Bumi, dan digunakan untuk menentukan informasi
posisi, kecepatan, waktu serta parameter-parameter turunan lainnya. Setiap
satelit GPS terdiri mempunyai dua sayap yang dilengkapi dengan sel-sel
pembangkit tenaga matahari (
solar panel
). Satelit juga mempunyai komponen
internal seperti jam atom dan pembangkit sinyal. Satelit GPS memiliki
komponen eksternal yaitu beberapa antena yang digunakan untuk menerima
2. Segmen sistem kontrol, berfungsi mengontrol dan memantau operasional
semua satelit GPS dan memastikan bahwa semua satelit berfungsi
sebagaimana mestinya. Secara spesifik tugas utama dari segmen sistem
kontrol GPS adalah:
-
Secara kontinyu memantau dan mengontrol sistem satelit
-
Menentukan dan menjaga waktu sistem GPS
-
Memprediksi ephemeris satelit serta karakteristik jam satelit
-
Secara periodik meremajakan (
update) navigation message
dari
setiap satelit
-
Melakukan manuver satelit agar tetp berada dalam orbitnya, atau
melakukan relokasi untuk menggantikan satelit yang tidak sehat,
seandainya diperlukan
Segmen kontrol juga berfungsi menentukan orbit dari seluruh satelit GPS
yang merupakan informasi vital untuk penentuan posisi dengan satelit.
3. Segmen pengguna, yang terdiri dari para pengguna satelit GPS, baik di darat,
laut, udara, maupun di angkasa. Dalam hal ini, alat penerima sinyal GPS
(GPS
receiver
) diperlukan untuk menerima dan memroses sinyal dari satelit
GPS untuk digunakan dalam penentuan posisi, kecepatan, waktu maupun
parameter turunan lainnya. Komponen utama dari suatu receiver GPS secara
umum adalah: antena dengan
pre-amplifier
, pemroses sinyal, pemroses data
(solusi navigasi), osilator presisi, unit pengontrolan receiver dan pemrosesan
(
user and external communication
), catu daya, memori serta perekam data.
2.2.2 Sinyal GPS
Satelit GPS memancarkan sinyal-sinyal, pada pr
insipnya untuk ‘memberi
tahu’
pengamat sinyal tentang posisi satelit tersebut serta jarak dari pengamat
beserta informasi waktunya. Dengan mengamati satelit dalam jumlah yang cukup
menggunakan
receiver
GPS, pengamat dapat menentukan posisi, kecepatan,
waktu, maupun parameter-parameter turunan lainnya.
Pada dasarnya sinyal GPS dapat dibagi atas 3 komponen yaitu:
1. penginformasi jarak (kode) yang berupa kode-P(Y) dan kode-C/A,
2. penginformasi posisi satelit (
navigation message
), dan
3. gelombang pembawa (
carrier wave
) L1 dan L2
Kode-C/A merupakan rangkaian dari 1023 bilangan biner (
chips
) yang
berulang setiap milidetik (
msec
) dan hanya dimodulasikan pada gelombang
pembawa L1. Sedangkan kode-P merupakan rangkaian bilangan biner yang sangat
panjang, yaitu 2,3547 x 10
14chips
, dan polanya tidak berulang sampai setelah 267
hari, serta dimodulasikan pada gelombang pembawa L1 dan L2. Pada saat ini
untuk mencegah terjadinya kemungkinan pengelabuan (
spoofing
) dari pihak
musuh,
pihak
militer
AS
yang
merupakan
pengelola
GPS,
telah
mentransformasikan kode-P menjadi kode-Y yang strukturnya hanya diketahui
oleh pihak militer AS dan pihak-pihak yang diizinkan saja.
Waktu yang diperlukan untuk ‘mengimpitkan’ kode yang diterima dari
satelit dan kode replika yang diformulasikan di dalam
receiver
(dt) adalah waktu
yang diperlukan oleh kode tersebut untuk menempuh jarak dari satelit ke
pengamat. Dengan mengalikan data dt dengan kecepatan cahaya maka jarak
antara pengamat dengan satelit dapat ditentukan.
Di samping berisi kode-kode, sinyal GPS juga berisi pesan navigasi
(
navigation message
) yang berisi informasi tentang koefisien koreksi jam satelit,
parameter orbit, almanak satelit, UTC, parameter koreksi ionosfer, serta informasi
spesial lainnya seperti status konstelasi dan kesehatan satelit. Salah satu informasi
yang terkandung dalam pesan navigasi GPS adalah ephemeris (orbit) satelit yang
biasa disebut
broadcast ephemeris
. Dalam
broadcast ephemeris
, informasi
tentang posisi satelit tidak diberikan langsung dalam koordinat, tetapi dalam
bentuk elemen-elemen keplerian dari orbit GPS yang dapat digunakan untuk
Selain
broadcast ephemeris
, pesan navigasi juga berisi almanak satelit
yang memberikan informasi tentang orbit nominal satelit. Almanak satelit sangat
berguna baik bagi
receiver
GPS dalam proses akuisasi awal data satelit maupun
bagi para pengguna dalam perencanaan waktu pengamatan yang optimal (Abidin,
H.Z, 2007).
2.2.2.1 Gelombang Pembawa
Ada dua gelombang pembawa yang digunakan yaitu L1 dan L2. Dalam hal
ini, gelombang L1 membawa kode-kode P (Y) dan C/A beserta pesan navigasi,
sedangkan gelombang L2 membawa kode P (Y) dan pesan navigasi. Agar
gelombang pembawa dapat ‘membawa’ data kode dan pesan navigasi, maka data
tersebut harus ditumpangkan ke gelombang pembawa.
Proses pemodulasian sinyal GPS melalui dua tahap yaitu
binary-to binary
modification of codes
dan tahap
binary biphase modulation
. Pada tahap pertama,
navigation message
ditumpangkan ke kode-P(Y) dan kode C/A. Sedangkan pada
tahap kedua, masing-
masing kode yang telah ‘membawa’
navigation message
ditumpangkan ke gelombang pembawa L1 dan L2 (Abidin, H.Z, 2007).
2.2.2.2 Perjalanan Sinyal GPS
Dalam perjalanannya dari satelit ke pengamat di permukaan bumi, sinyal
GPS harus melalui medium-medium ionosfer dan troposfer, dimana dalam kedua
lapisan tersebut sinyal GPS akan mengalami refraksi dan sintilasi (
scintillation
) di
dalamnya, serta pelemahan (
atmospheric attenuation
) dalam lapisan troposfer. Di
samping itu, sinyal GPS juga dapat dipantulkan oleh benda-benda di sekitar
pengamat sehingga dapat menyebabkan terjadinya
multipath
, yaitu fenomena
dimana sinyal GPS yang diterima oleh antena adalah resultan dari sinyal langsung
dan sinyal pantulan. Kesalahan dan bias tersebut akan menyebabkan kesalahan
pada jarak ukuran dengan GPS, sehingga harus
diperhitungkan dalam
pemrosesan.
2.2.3 Metoda dan Prinsip Pengukuran GPS
Konsep dasar pada penentuan posisi dengan GPS adalah reseksi
simultan ke beberapa satelit GPS yang koordinatnya telah diketahui (Abidin, H.Z,
2007). Pada pelaksanaan pengukuran penentuan posisi dengan GPS, pada
dasarnya ada dua jenis/tipe alat penerima sinyal satelit (
receiver
) GPS yang dapat
digunakan, yaitu :
1. Tipe Navigasi digunakan untuk penentuan posisi yang tidak menuntut ketelitian
tinggi.
2. Tipe Geodetik digunakan untuk penentuan posisi yang menuntut ketelitian
tinggi.
Posisi yang diberikan oleh
GPS
adalah posisi 3 dimensi (x,y,z atau
,
,h) yang
dinyatakan dalam datum WGS (
World Geodetic System
) 1984, sedangkan tinggi
yang diperoleh adalah tinggi ellipsoid.
Pada pengukuran GPS masing-masing memiliki empat parameter yang
harus ditentukan yaitu 3 parameter koordinat x, y, z atau L, B, h dan satu
parameter kesalahan waktu akibat ketidak sinkronan jam osilator di satelit dengan
jam di
receiver
GPS. Oleh karena itu, diperlukan minimal pengukuran jarak ke
empat satelit. Metode penentuan posisi dengan GPS pertama-tama dibagi dua,
yaitu metode absolut, dan metode diferensial. Masing-masing metode dapat
dilakukan dengan cara
real time
dan atau
post-processing
. Apabila obyek yang
ditentukan posisinya diam, maka metodenya disebut statik. Sebaliknya, apabila
obyek yang ditentukan posisinya bergerak, maka metodenya disebut kinematik.
Selanjutnya, metode yang lebih detail antara lain metode-metode seperti SPP,
DGPS, RTK, Survei GPS,
Rapid
Statik,
Pseudo
Kinematik,
stop and go
serta
beberapa metode lainnya.
Metode absolut atau juga dikenal sebagai point positioning, menentukan
posisi hanya berdasarkan pada 1 pesawat penerima (
receiver
) saja.
Keteleitian posisi dalam beberapa meter (tidak berketelitian tinggi) dan
umumnya hanya diperuntukan bagi keperluan navigasi.
Metode relatif atau sering disebut
differential positioning
, menentukan
posisi dengan menggunakan lebih dari sebuah
receiver
. Satu GPS
dipasang pada lokasi tertentu dimuka bumi dan secara terus menerus
menerima sinyal dari satelit dalam jangka waktu tertentu dijadikan sebagai
tinggi (umumnya kurang dari 1 meter) dan diaplikasikan untuk keperluan
survei geodesi ataupun pemetaan yang memerlukan ketelitian tinggi
Berikut ini dalam Tabel 2.1 adalah beberapa metode penentuan posisi dengan
menggunakan GPS :
Tabel 2.1
Metoda Penentuan Posisi Menggunakan GPS
(Abidin, H.Z, 2007)
Metode
Absolute
(1 receiver)
Differensial
(min 2 receiver)
Titik
Receiver
Static
Diam
Diam
Kinematik
Bergerak
Bergerak
Rapid static
Diam
Diam (singkat)
Pseudeo
kinematik
Diam
Diam & bergerak
Stop and go
Diam
Diam & bergerak
2.2.3.1 Metode Penentuan Posisi Statik
Pada prinsipnya survey GPS bertumpu pada metode-metode penentuan
posisi statik secara diferensial dengan menggunakan data fase. Penentuan posisi
relatif atau metode differensial adalah menentukan posisi suatu titik relatif
terhadap titik lain yang telah diketahui koordinatnya. Pengukuran dilakukan
secara bersamaan pada dua titik dalam selang waktu tertentu. Selanjutnya, data
hasil pengamatan diproses dan dihitung sehingga akan didapat perbedaan
koordinat kartesian 3 dimensi (dx, dy, dz) atau disebut juga dengan
baseline
antar
titik yang diukur.
Dalam hal ini pengamatan satelit GPS umumnya dilakukan
baseline
per
baseline
selama selang waktu tertentu (beberapa puluh menit hingga beberapa jam
tergantung tingkat ketelitian yang diinginkan) dalam suatu kerangka titik-titik
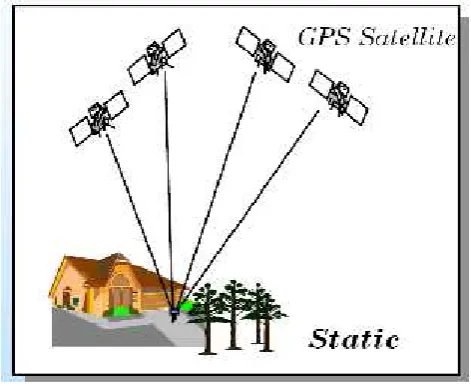
yang akan ditentukan posisinya. Secara umum metode ini dapat dilihat pada
gambar 2.2. Karakteristik umum dari metode penentuan posisi ini adalah sebagai
Memerlukan minimal dua
receiver
, satu ditempatkan pada titik yang telah
diketahui koordinatnya.
Posisi titik ditentukan relatif terhadap titik yang diketahui.
Konsep dasar adalah
differencing process
, dapat mengeliminir atau
mereduksi pengaruh dari beberapa kesalahan dan bias.
Bisa menggunakan data
pseudorange
atau fase.
Ketelitian posisi yang diperoleh bervariasi dari tingkat mm sampai dengan
dm.
Aplikasi utama: survei pemetaan, survei penegasan batas, survei geodesi
dan navigasi dengan ketelitian tinggi.
Pada survei GPS, pemrosesan data GPS untuk menentukan koordinat dari
titik-titik dalam kerangka umumnya akan mencakup tiga tahapan utama, yaitu :
Pengolahan data dari setiap
baseline
dalam kerangka
Perataan jaringan yang melibatkan semua
baseline
untuk menentukan
koordinat dari titik-titik dalam kerangka
Transformasi koordinat titik-titik tersebut dari datum WGS 84 ke datum
yang dibutuhkan pengguna
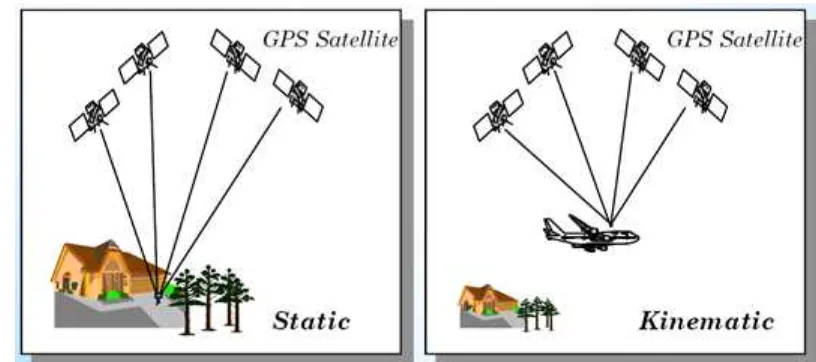
2.2.3.2 Metode Penentuan Posisi Kinematik
Penentuan posisi secara kinematik adalah penentuan posisi dari titik-titik
yang bergerak dan receiver GPS tidak dapat atau tidak mempunyai kesempatan
untuk berhenti pada titik-titik tersebut. Penentuan posisi kinematik ini dapat
dilakukan secara absolut ataupun diferensial dengan menggunakan data
pseudorange
dan/atau fase. Hasil penentuan posisi bisa diperlukan saat
pengamatan atau sesudah pengamatan.
Berdasarkan pada jenis data yang digunakan serta metode penentuan
posisi yang digunakan, ketelitian posisi kinematik yang diberikan oleh GPS dapat
berkisar dari tingkat rendah sampai tingkat tinggi. Dari segi aplikasinya metode
kinematik GPS akan bermanfaat untuk navigasi, pemantauan,
guidance
,
fotogrametri,
airbone gravimetry
, survei hidrografi, dll. Secara umum metode ini
dapat dilihat di gambar 2.2. Terdapat beberapa karakteristik dari metode
Metode ini harus berbasiskan penentuan posisi diferensial yang
menggunakan data fase
Problem utamanya adalah penentuan ambiguitas fase secara
on-the-fly
,
yaitu penentuan ambiguitas fase pada saat
receiver
sedang bergerak dalam
waktu sesingkat mungkin.
Penentuan ambiguitas secara
on-the-fly
akan meningkatkan ketelitian,
keandalan, fleksibilitas dari penentuan posisi kinematik.
Saat ini dikenal beberapa teknik penentuan ambiguitas fase
Hasil penentuan posisi bisa diperlukan saat pengamatan ataupun sesudah
pengamatan
Untuk moda real time, diperlukan komunikasi data antara stasiun referensi
dengan
receiver
yang bergerak.
Gambar 2.2
Posisi Satelit GPS Statik dan Kinematik
(Abidin, H.Z.2007)
2.2.3.3 Metode Penentuan Posisi Rapid Statik
Metode penentuan posisi dengan survei static singkat
(rapid static)
pada dasarnya adalah survei statik dengan waktu pengamatan yang lebih singkat,
yaitu 5-20 menit. Prosedur operasional lapangan pada survei statik singkat adalah
sama seperti pada survei statik, hanya selang waktu pengamatannya yang lebih
singkat. Oleh sebab itu disamping memerlukan perangkat lunak yang handal dan
canggih, metode statik singkat juga memerlukan geometri pengamatan yang baik,
pengamatan yang relatif tidak menimbulkan multipath. Secara umum gambaran
metode ini dapat dilihat pada gambar 2.3.
Gambar 2.3
Rapid Static
Terdapat beberapa hal yang perlu di catat yaitu :
a. Survei statik singkat mempunyai tingkat produktivitas yang lebih tinggi,
karena waktu pengamatan satu sesi relatif singkat
b. Metode survei statik singkat memerlukan
receiver
GPS serta piranti lunak
pemrosesan data yang lebih canggih dan lebih modern
c. Metode survei statik singkat relatif kurang fleksibel dalam hal spesifikasi
pengamatan
d. Metode survei statik singkat relatif lebih rentan terhadap efek kesalahan dan
bias
2.2.4 Ketelitian Penentuan Posisi dengan GPS
Pada sistem GPS terdapat beberapa kesalahan komponen sistem yang akan
mempengaruhi ketelitian hasil posisi yang diperoleh. Kesalahan-kesalahan
tersebut contohnya kesalahan orbit satelit, kesalahan jam satelit, kesalahan jam
receiver, kesalahan pusat fase antena, dan
multipath
. Hal hal lain yang
mempengaruhi kesalahan sistem seperti efek
imaging
, dan
noise
. Kesalahan ini
dapat dieliminir dengan menggunakan teknik
differencing
data (Abidin, H.Z,
Ketelitian posisi yang didapat dari pengamatan
GPS
secara umum
bergantung pada 4 faktor:
a. Ketelitian data
tipe data yang digunakan
kualitas
receiver GPS
level dari kesalahan dan bias
b. Geometri satelit
jumlah satelit
lokasi dan distribusi satelit
lama pengamatan
c. Metode penentuan posisi
absolute
dan
differensial positioning
static, rapid static, pseudo-kinematic, stop and go, kinematic
one and multi monitor station
d. Strategi pemrosesan data
real-time
dan
post processing
strategi eliminasi dan pengkoreksian kesalahan dan bias
metode estimasi yang digunakan
pemrosesan baseline dan perataan jaring
kontrol kualitas
2.2.5. Kesalahan dan Bias
Kesalahan dan bias GPS pada dasarnya dapat dikelompokkan menjadi
(Abidin, H.Z, 2007):
a. Kesalahan
ephemeris
(orbit), yaitu kesalahan dimana orbit satelit yang
dilaporkan oleh ephemeris satelit tidak sama dengan orbit satelit yang
sebenarnya. Kesalahan ini akan mempengaruhi ketelitian dari
koordinat titik-titik. Kesalahan orbit satelit GPS pada dasarnya
disebabkan oleh kekurang telitian pada proses perhitungan orbit satelit,
kesalahan dalam prediksi orbit untuk periode waktu setelah
uploading
b. Bias Ionosfer. Jumlah elektron dan ion bebas pada lapisan ionosfer
tergantung pada besarnya intensitas radiasi matahari serta densitas gas
pada lapisan tersebut. Bias ionosfer akan mempengaruhi kecepatan,
arah, polarisasi, dan kekuatan sinyal GPS. Ionosfer akan
memperlambat
pseudorange
(ukuran jarak menjadi lebih panjang) dan
mempercepat fase (ukuran jarak menjadi lebih pendek).
c. Bias Troposfer. Lapisan troposfer merupakan atmosfer netral yang
berbatasan dengan permukaan Bumi dimana temperatur menurun
dengan membesarnya ketinggian. Lapisan ini memiliki ketebalan 9-16
km. Disini sinyal GPS akan mengalami refraksi, yang menyebabkan
perubahan pada kecepatan dan arah sinyal GPS. Efek utama dari
troposfer sangat berpengaruh pada kecepatan, atau dengan kata lain
terhadap hasil ukuran jarak. Pada lapisan ini
pseudorange
dan fase
diperlambat. Dan besar magnitude bias troposfer pada kedua data
pengamatan tersebut adalah sama.
d.
Multipath
, yaitu fenomena dimana sinyal dari satelit tiba di antena
GPS melalui dua atau lebih lintasan yang berbeda. Hal ini disebabkan
karena sinyal dipantulkan oleh benda-benda disekitar antena sebelum
tiba di antena. Benda-benda tersebut dapat berupa jalan raya, gedung,
danau, dan kendaraan. Perbedaan panjang lintasan menyebabkan
sinyal-sinyal tersebut berinteferensi ketika tiba di antena yang pada
akhirnya menyebabkan kesalahan pada hasil pengamatan. Dan
mempengaruhi hasil ukuran
pseudorange
maupun
carrier phase.
e. Ambiguitas Fase (
Cycle Ambiguity)
, yaitu jumlah gelombang penuh
yang tidak terukur oleh receiver GPS. Sepanjang
receiver
GPS
mengamati sinyal secara kontinyu (tidak terjadi
cycle slip
), maka
ambiguitas fase akan selalu sama harganya untuk setiap epok.
f.
Cycle Slips
, adalah ketidak-kontinyuan dalam jumlah gelombang
penuh dari fase gelombang pembawa yang diamati, karena receiver
yang disebabkan oleh satu dan lain hal ‘terputus’
g.
Selective Availability,
adalah metode yang pernah diaplikasian untuk
pihak militer Amerika Serikat, sebagai pemilik dan pengelola GPS,
secara sengaja dengan menerapkan kesalahan-kesalahan berikut, yaitu:
-
Kesalahan waktu satelit (
dithering technique
atau SA-
),
memanipulasi frekuensi dari jam satelit
-
Kesalahan ephemeris satelit (
epsilon technique
atau SA-
),
memanipulasi data ephemeris dalam pesan navigasi yang
dikirimkan satelit
h.
Anti spoofing
, suatu kebijakan dari DoD Amerika Serikat, dimana
kode-P dari sinyal GPS diubah menjadi kode-Y
i.
Kesalahan Jam, kesalahan jam
receiver
dan jam satelit. Kesalahan dari
salah satu jam, apakah itu dalam bentuk offset waktu, offset frekuensi,
ataupun
frequecy drift
akan langsung mempengaruhi ukuran jarak, baik
pseudorange
maupun jarak fase. Ketelitian ukuran jarak
pseudorange
yang diperoleh akan sangat tergantung pada ketelitian dari dt
Kesalahan Jam Satelit
Kesalahan Jam
Receiver
,
receiver
GPS umumnya dilengkapi
dangen jam (osilator) kristal quartz. Komponen kesalahan pada
ukuran jarak ke satelit yang disebabkan oleh kesalahan jam
receiver akan lebih besar daripada yang disebabkan oleh kesalahan
jam satelit.
j.
Pergerakan dari Pusat Fase Antena, pusat fase antena adalah pusat
radiasi yang sebenarnya, dan dalam konteks GPS merupakan titik
referensi yang sebenarnya digunakan dalam pengukuran sinyal secara
elektronis. Karena sumber radiasi yang ideal tersebut sulit
direalisasikan pada antena GPS, maka pusat fase antena GPS
umumnya akan berubah-ubah tergantung pada elevasi dan azimuth
satelit serta intensitas sinyal dan lokasinya akan berbeda untuk sinyal
L1 dan L2
.
k. Imaging
, yaitu fenomena yang melibatkan suatu benda konduktif
(konduktor) yang berada dekat dengan antena GPS, seperti reflektor
berukuran besar maupun
groundplane
dari antena itu sendiri.
Fenomena ini seolah-olah menjadi antena tersendiri yang dapat dilihat
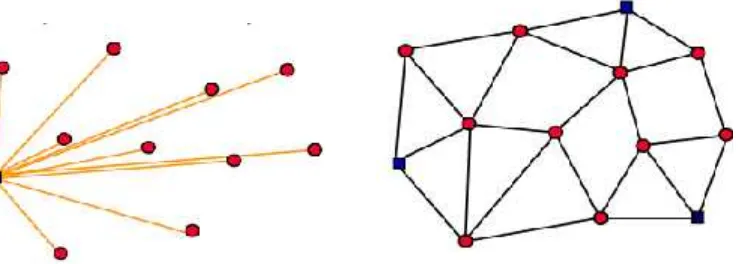
2.2.6 Geometrik Jaring
Sebatas tahap perhitungan baseline, bentuk jaring titik-titik GPS bukanlah
suatu isu yang krusial dibandingkan dengan ukuran jaringan. Panjang baseline
lebih berpengaruh dibandingkan letak dan orientasinya. Untuk keperluan
penentuan
cycle ambigugity
, panjang baseline dalam suatu jaring GPS sebaiknya
bervariasi secara gradual dari pendek ke panjang (
bootstraping method
). Tetapi
dari segi untuk menjaga tingkat serta konsistensi ketelitian titik-titik tersebut
sebaiknya terdistribusi secara merata dan teratur. Karakteristik baseline sendiri
terdiri dari dua jenis metoda, yaitu metoda radial dan jaring seperti pada gambnar
2.4 dan gambar 2.5.
Gambar 2.4
Metoda Radial
Gambar 2.5
Metoda Jaring
(Abidin et al.,2002 dalam Abidin,H.Z, 2007)
2.2.6.1. Metoda Radial
Adapun karakteristik dari metoda radial ini adalah sebagai berikut :
Geometri untuk penentuan posisi relatif lebih lemah.
Ketelitian posisi yang diperoleh relatif akan lebih rendah.
Waktu pengumpulan dan pengolahan data relatif akan lebih cepat.
Jumlah
receiver
dan/atau sesi pengamatan yang diperlukan relatif
lebih sedikit.
Biaya untuk logistik, transportasi, dan akomodasi relatif akan lebih
murah.
2.2.6.2.
Metoda Jaring
Adapun karakteristik metoda jaring ini adalah sebagai berikut :
Geometri untuk penentuan posisi relatif lebih kuat
Ketelitian posisi yang diperoleh relative akan lebih tinggi.
waktu pengumpulan dan pengolahan data relatif akan lebih lambat.
Jumlah
receiver
dan/atau sesi pengamatan yang diperlukan relative
lebih banyak.
Biaya untuk logistik, transportasi, dan akomodasi relatif akan lebih
mahal.
Kontrol kualitas relatif lebih baik.
2.2.7 Receiver GPS
Receiver GPS untuk penentuan posisi dibedakan menjadi 3 tipe yaitu :
GPS Geodetic
GPS Geodetic pada gambar 2.6 memiliki sistem penerima (
receivers
)
dual frekuensi yaitu mampu menangkap dua signal L1 dan L2
bersamaan. GPS tersebut umumnya digunakan untuk keperluan survei
dengan tingkat akurasi sangat tinggi dan tingkat kesalahan dibawah
centimeter, misalnya kegiatan survei : kontruksi, jalan bebas
hambatan, pengeboran, dan lain sebaginya. Tipe ini adalah tipe paling
canggih, paling mahal, dan jiuga memberikan data yang paling presisi
(Hasyim, Abdul Wahid.2009).
GPS
Mapping
GPS
Mapping
memiliki frekuensi tunggal (
single
frekuensi) yang
berfungsi menerima dan mengumpulkan data-data spasial untuk
kemudian dituangkan dalam kegiatan GIS/SIG (sitem informasi
geografis). Tingkat ketelitian GPS ini termasuk mediuum (menengah)
dengan kesalahan dibawah meter hingga beberapa meter (<10m).
Perangkat ini biasa digunakan untuk kegiatan pemetaan (Hasyim,
Abdul Wahid.2009). Receiver pemetaan ini memberikan data
pseudorange (kode C/A), data pada receiver tipe pemetaan direkam
dan kemudian dipindah atau didownload ke komputer untuk diproses
lebih lanjut.
GPS Navigasi
GPS Navigasi biasa digunakan oleh sipil. Perangkat ini memiliki
kemampuan lebih rendah dari GPS
Mapping
karena keterbatasan pada
track log
maupun penyimpanan
waypoint
dan bahkan fasilitas kompas
ataupun altimeter tidak ditemui (Hasyim, Abdul Wahid.2009).
Umumnya tipe ini digunakan untuk penentuan posisi
absolute
secara
instan yang tidak menuntut ketelitian terlalu tinggi.
2.2.8 Jaringan Ina-CORS
Di Indonesia, sistem koreksi diferensial sudah dimudahkan dengan adanya
sistem InaCORS yang merupakan kepanjangan dari Indonesia
Continously
Operating Refference System
. Sistem ini merupakan rangkaian jejaring
base
station
yang merupakan referensi pengukuran bidang di permukaan bumi.
Data
yang dihasilkan dapat diakses oleh siapapun yang membawa receiver GPS dengan
spesifikasi tertentu. GNSS-CORS melayani klien yang melakukan pengukuran
GNSS (GPS, GLONASS) dengan metode deferensial (data kode) dan RTK (data
fase). Untuk dapat mengakses GNSS-CORS, receiver klien harus dilengkapi
dengan sambungan internet untuk maksud komunikasi data dari stasiun
GNSS-CORS ke receiver klien. Dalam hal ini data GNSS-GNSS-CORS tersedia melalui web
dalam format RINEX (Receiver Independent Exchange) maupun streaming
NTRIP (Networked Tranport RTCM via Internet Protocol). NTRIP adalah sebuah
melalui internet. RTCM sendiri adalah kependekan dari Radio Technical
Commission for Maritime Services, yang merupakan komite khusus yang
menentukan standard radio navigasi dan radio komunikasi maritim internasional.
Data format RINEX disediakan untuk pengolahan data secara
post-processing
Adapun institusi yang menginisiasi dan mengoperasionalkan sistem ini
adalah Badan Informasi Geospasial.
Gambar 2.7
Jaringan Ina-CORS
Data layanan CORS meliputi data dalam format RINEX dan streaming
NTRIP.
Data RINEX diperjualbelikan untuk kemudian diolah dengan
menggunakan software komersial maupun scientific. Pemrosesan dapat dilakukan
dengan mendiferensialkan data RINEX dari CORS dengan data RINEX hasil
pengukuran. Koreksi data GPS dalam format RTCM ini digunakan untuk
19
ANALISA DATA GPS GEODETIK
3.1
Lokasi Pengukuran
Pengukuran titik GPS dilakukan untuk mengetahui koordinat 8 BM sungai
yang terletak 4 wilayah Kabupaten/Kota, yaitu Kabupaten Minahasa, Minahasa
Utara, Minahasa Tenggara, dan Kota Bitung. Daftar titik BM sungai yang dilakukan
pengamatan GPS Geodetik disebutkan pada Tabel 3.1.
Tabel 3.1
Lokasi Pengukuran GPS Geodetik Jaringan Air Tanah
No.
Nama Sungai
Lokasi
1
S. Girian
Girian, Kota Bitung
2
S. Likupang
Likupang, Minahasa Utara
3
S. Mokupa Dua
Mokupa, Minahasa
4
S. Paniki
Tanawangko, Minahasa
5
S. Ranowelang
Kakas, Minahasa
6
S. Panasen
Kakas, Minahasa
7
S. Makalu
Makalu, Minahasa Tenggara
8
S. Wowosan
Belang, Minahasa Tenggara
Sebelum melakukan pengukuran dengan GPS Geodetik dilakukan
pengambilan data koordinat terlebih dahulu dengan koordinat pendekatan sehingga
bisa diketahui gambaran kasar lokasi pengukuran. Pengamatan atau pengambilan data
dilakukan dengan menggunakan GPS Geodetik secara
baseline
dan diikat dengan BM
milik Badan Informasi Geospasial (BIG) atau yang dulu sering dikenal sebagai
Bakosurtanal sehingga data yang dihasilkan memiliki referensi Nasional. BM yang
digunakan mengacu pada data Ina-CORS BIG di Kota Bitung, Sulawesi Utara, dan
Ternate, Maluku. Pada pengamatan ini, BM milik BIG yang digunakan sebagai
base
sebanyak 2 titik yaitu BM CBIT (terletak di Maesa, Bitung) dan BM CTER (terletak
3.1.1 Data Pengamatan Referensi
Jaringan Ina-CORS CBIT
Gambar 3.1
Titik Ina-Cors CBIT
Adapun Deskripsi Titik adalah :
Kode titik
: CBIT
Lokasi
: Bitung, Maesa, Sulawesi Utara
Tipe
receiver
: LEICA GR10
Tipe antena
: TPSCR.G3 LEIS
Cuaca
:
-Lintang
: 1° 26
’
35.254876
”
N
Bujur
: 125° 11
’
12.312640
”
E
Tinggi
: 78.320 m
Zona
: 51 N
Datum Horizontal
: SRGI 2013
Jaringan Ina-CORS CTER
Adapun Deskripsi Titik adalah :
Kode titik
: CTER
Lokasi
: Ternate, Maluku
Tipe
receiver
: LEICA GR10
Tipe antena
: TPSCR.G3 LEIS
-Lintang
: 0° 47’ 16.418939” N
Bujur
: 127° 22’ 58.064413” E
Tinggi
: 101.320 m
Zona
: 51 N
Datum Horizontal
: SRGI 2013
3.1.2 Data Pengamatan
a. Pengukuran BM Sungai Likupang
Gambar 3.2
Pengamatan GPS Geodetik BM Sungai Likupang
Lokasi
: Likupang, Minahasa Utara
Tipe
receiver
: Trimble R4
Cuaca
: Cerah
Tanggal Pengamatan : 29 – 05- 2017
Waktu Pengamatan
: 12.05 s/d 13.25 WITA
Tinggi alat
: 1,375 m
b. Pengukuran BM Sungai Girian
Lokasi
: Girian, Kota Bitung
Tipe
receiver
: Trimble R4
Cuaca
: Cerah
Tanggal Pengamatan : 29 – 05- 2017
Waktu Pengamatan
: 12.11 s/d 13.11 WITA
Gambar 3.3
Pengamatan GPS Geodetik BM Sungai Girian
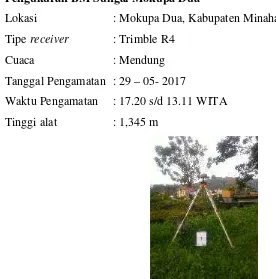
c. Pengukuran BM Sungai Mokupa Dua
Lokasi
: Mokupa Dua, Kabupaten Minahasa
Tipe
receiver
: Trimble R4
Cuaca
: Mendung
Tanggal Pengamatan : 29 – 05- 2017
Waktu Pengamatan
: 17.20 s/d 13.11 WITA
Tinggi alat
: 1,345 m
Gambar 3.4
Pengamatan GPS Geodetik BM Sungai Mokupa Dua
d. Pengukuran BM Sungai Paniki
Lokasi
: Paniki, Tanawangko, Kabupaten Minahasa
Tipe
receiver
: Trimble R4
Cuaca
: Mendung
Tanggal Pengamatan : 29 – 05- 2017
Tinggi alat
: 1,372 m
Gambar 3.5
Pengamatan GPS Geodetik BM Sungai Paniki
e. Pengukuran BM Sungai Wowosan
Lokasi
: Wowosan, Kecamatan Belang, Minahasa Tenggara
Tipe
receiver
: Trimble R4
Cuaca
: Cerah
Tanggal Pengamatan : 30 – 05- 2017
Waktu Pengamatan
: 08.59 s/d 10.34 WITA
Tinggi alat
: 1,377 m
Gambar 3.6
Pengamatan GPS Geodetik BM Sungai Wowosan
f. Pengukuran BM Sungai Makalu
Lokasi
: Makalu, Kabupaten Minahasa Tenggara
Tipe
receiver
: Trimble R4
Cuaca
: Cerah
Waktu Pengamatan
: 09.03 s/d 10.33 WITA
Tinggi alat
: 1,245 m
Gambar 3.7
Pengamatan GPS Geodetik BM Sungai Makalu
g. Pengukuran BM Sungai Ranowelang
Lokasi
: Ranowelang, Kakas, Kabupaten Minahasa
Tipe
receiver
: Trimble R4
Cuaca
: Cerah
Tanggal Pengamatan : 30 – 05- 2017
Waktu Pengamatan
: 12.34 s/d 13.50 WITA
Tinggi alat
: 1,218 m
Gambar 3.8
Pengamatan GPS Geodetik BM Sungai Ranowelang
h. Pengukuran BM Sungai Panasen
Lokasi
: Panasen, Kakas, Kabupaten Minahasa
Tipe
receiver
: Trimble R4
Tanggal Pengamatan : 30 – 05- 2017
Waktu Pengamatan
: 12.45 s/d 13.45 WITA
Tinggi alat
: 1,313 m
Gambar 3.9
Pengamatan GPS Geodetik BM Sungai Panasen
i.
Hasil pengolahan
Post Processing
Pengukuran GPS Geodetik Minahasa
Proses pengolahan data pengukuran GPS menggukan secara
differensial
menggunakan metode
static
dengan membentuk jaring segitiga (Baseline).
Pengolahan data menggunakan Data
RINEX
hasil pengamatan GPS pada waktu
yang sama. Adapaun bentuk
baseline
pengukuran GPS statik yang diikatkan pada
titik CBIT (Bitung) dan CTER (Ternate) sebagai referensi pengukuran. Titik
Pengamatan yang diolah di Kabupaten Minahasa adalah BM Sungai Panasen,
Ranowelang, Mokupa Dua, dan Paniki.
a.
b.
Gambar 3.10
Baseline
Pengamatan GPS Geodetik di Minahasa (a. Baseline
Pengamatan Panasen dan Ranowelang; b. Baseline Pengamatan Mokupa Dua dan
Baseline
yang terbentuk dapat dilihat dibawah ini pada gambar 3.11 di atas,
dan tabel 3.2 adalah parameter pengapatan antar
baseline. Sedangkan hasil proses
pengolahan
baseline
menjadi koordinat dapat dilihat pada tabel 3.3 berikut ini.
Tabel 3.2
Parameter pengamatan GPS
GPS Observations
Name dN (m) dE (m) dHt (m)
Horz RMS (m)
Vert RMS (m)
CBIT-CTER 72283.004 -244815.27 -23 0.01 0.018
CBIT-S. Paniki 5270.457 56103.706 0.995 0.008 0.013 CBIT-S. Mokupa 2831.417 52699.137 -4.266 0.003 0.020
CTER-S. Paniki -67012.547 300918.980 23.995 0.010 0.017 CTER-S. Mokupa -69451.587 297514.411 18.734 0.007 0.014 CBIT-S. Ranowelang 29253.384 33669.542 -682.377 0.007 0.012
CBIT-S. Panasen 28636.594 34818.318 -685.097 0.005 0.011 CTER-S. Ranowelang -43029.62 278484.82 -659.377 0.009 0.017 CTER-S. Panasen -43646.41 279633.59 -662.097 0.01 0.019
Setelah didapatkan parameter pengukuran GPS seperti diatas, dilakukan
perataan perhitungan untuk mengetahui koordinat BM tersebut. Koordinat yang
didapatkan disajikan pada tabel 3.3 dibawah ini.
Tabel 3.3
Hasil perhitungan koordinat UTM 51 N
Points
Name Northing (m) Easting (m) Elevation (m) Code
CBIT
159626.141
743313.65
78.32
CTER
87343.137
988128.93
101.32
Mokupa Dua
156794.724
690614.515
82.586
Paniki
154355.684
687209.946
77.325
j.
Hasil pengolahan
Post Processing
Pengukuran GPS Geodetik Kota
Bitung dan Minahasa Tenggara
Pada proses ini, data yang diolah adalah BM Sungai Girian, Sungai Wowosan,
dan Sungai Makalu.
Baseline
yang terbentuk pada pengukuran GPS statik yang
diikatkan pada titik CBIT (Bitung) dan CTER (Ternate) seperti pada gambar 3.12
dibawah ini. Tabel 3.4 adalah parameter pengapatan antar
baseline.
Gambar 3.11
Baseline
Pengamatan GPS Geodetik di Kota Bitung dan
Minahasa Tenggara
Tabel 3.4
Parameter pengamatan GPS
GPS ObservationsName dN (m) dE (m) dHt
(m)
Horz RMS (m)
Vert RMS (m)
CBIT-CTER 72283 -244815 -23 0.01 0.018
CBIT-S. Girian
201.709
7402.431
-3.726
0.001
0.002
CBIT-S. Wowosan
55761.98
44688.32
2.288
0.006
0.009
CBIT-S. Makalu
50596.88
35558.06
-2.871
0.003
0.007
CTER-S. Girian
-72081.3
252217.7
19.274
0.006
0.01
CTER-S. Wowosan
-16521
289503.6
25.288
0.009
0.017
CTER-S. Makalu
-21686.1
280373.3
20.129
0.009
0.016
Dengan didapatkan parameter pengukuran diatas, maka dilakukan perataan
perhitungan, sehingga didapatkan data koordinat seperti tabel 3.5 dibawah ini.
Tabel 3.5
Hasil perhitungan koordinat UTM 51 N
Points
Name Northing
(m) Easting (m)
Elevation
(m) Code
CBIT
159626.141
743313.65
78.32
CTER
87343.137
988128.93
101.32
S. Girian
159424.432
735911.221
82.046
S. Makalu
109029.259
707755.588
81.191
S. Wowosan
103864.158
698625.335
76.032
k. Hasil Pengolahan
Post Processing
Pengukuran GPS Geodetik Kabupaten
Minahasa Utara
Hasil pengukuran GPS statik BM Sungai Likupang diikatkan pada titik CBIT
(Bitung) dan CTER (Ternate) sebagai referensi pengukuran.
Baseline
yang
terbentuk antara ketiga titik tersebut dapat dilihat dibawah ini pada gambar 3.13.
Parameter pengamatan antar
baseline
ditampilkan pada tabel 3.6
Gambar 3.12
Baseline
Pengamatan GPS Geodetik di Minahasa Utara
Tabel 3.6
Parameter pengamatan GPS
GPS Observations
Name dN (m) dE (m) dHt
(m)
Horz RMS (m)
Vert RMS (m)
CBIT-CTER
72283.004
-244815.274 -23 0.01 0.018
CBIT-S. Likupang
-23702.914 13901.449 -3.184 0.001 0.002
CTER-S. Likupang
Tahap berikutnya adalah perataan perhitungan untuk mendapatkan data
koordinat seperti pada table 3.8 dibawah ini.
Tabel 3.7
Hasil perhitungan koordinat UTM 51 N
Points
Name Northing
(m) Easting (m)
Elevation
(m) Code
CBIT
159626.141
743313.65
78.32
30
PENUTUP
4.1. Kesimpulan
1. Pengamatan GPS menggunakan
Receiver
GPS Geodetic
Metode
Differencial Static
dilakukan terhadap 8 BM Sungai. Metode yang
digunakan adalah metode
baseline
dengan referensi pengukuran berupa
titik jaringan Ina-CORS BIG kode CBIT (Bitung) dan CTER (Ternate).
2. Setelah dilakukan pengukuran, didapatkan koordinat yang tercantum pada
tabel berikut (Tabel koordinat lengkap terlampir).
Tabel 4.1
Hasil Koordinat Grid UTM Zona 51 N
No.
Nama Sungai
Lokasi
Koordinat
N
E
H
1
S. Girian
Girian, Kota
Bitung
159424.432 735911.221
82.046
2
S. Likupang
Likupang,
Minahasa Utara
183329.055 729412.203
81.504
3
S. Mokupa Dua
Mokupa,
Minahasa
156794.724 690614.515
82.586
4
S. Paniki
Tanawangko,
Minahasa
154355.684 687209.946
77.325
5
S. Ranowelang
Kakas, Minahasa
130372.757 709644.110
760.697
6
S. Panasen
Kakas, Minahasa
130989.547 708495.334
763.417
7
S. Makalu
Makalu, Minahasa
Tenggara
109029.259 707755.588
81.191
8
S. Wowosan
Belang, Minahasa
Tenggara
103864.158 698625.335
76.032
4.2 Saran
Adapun saran yang dapat diberikan adalah:
1. Titik yang akan diukur sebaiknya terletak pada daerah yang lapang, tidak
terhalang oleh bangunan dan pohon yang tinggi dan kondisi medan yang
relatif stabil (tidak ada halangan yang menutup sinyal GPS)
No.
Nama BM
(Sungai)
Lokasi
Koordinat
N
E
H
Lintang
Bujur
1
S. Girian
Girian, Kota
Bitung
159424.432 735911.221
82.046 1°26'28.91790"N
125°07'12.91581"E
2
S. Likupang
Likupang,
Minahasa Utara
183329.055 729412.203
81.504 1°39'27.18037"N
125°03'43.48529"E
3
S. Mokupa Dua
Mokupa,
Minahasa
156794.724 690614.515
82.586 1°25'04.54794"N
124°42'47.76812"E
4
S. Paniki
Tanawangko,
Minahasa
154355.684 687209.946
77.325 1°23'45.22385"N
124°40'57.58079"E
5
S. Ranowelang
Kakas, Minahasa
130372.757 709644.110 760.697 1°10'43.96722"N
124°53'02.66369"E
6
S. Panasen
Kakas, Minahasa
130989.547 708495.334 763.417 1°11'04.07061"N
124°52'25.52392"E
7
S. Makalu
Makalu,
Minahasa
Tenggara
109029.259 707755.588
81.191 0°59'09.21790"N
124°52'01.16073"E
8
S. Wowosan
Belang, Minahasa
BM Sungai Girian
Metoda Pengukuran
Statik Diffrensial
Lokasi
KEL : Manembo – nembo Tengah KEC : GirianKAB : Kota Bitung PROV : Sulawesi Utara
Koordinat Geografi
L: 1°26'28.91790"N B: 125°07'12.91581"E Height :82.046Koordinat UTM 51North
X:735911.221
Y: 159424.432 Elevasi :82.046Receiver
Trimble
Antena
Trimble R4
Tinggi Antena
Miring/ Tegak ; Sebelum : 1. 177
Sesudah : 1. 177
Uraian Lokasi : Terletak di Kelurahan Manembo – nembo, berada di sekitar 300 meter di sebelah timur laut
RSUD Bitung
Kenampakan Menonjol :
Jalan Ke Lokasi : Jalan JH Pussung
Transportasi & Akomodasi ke lokasi : Kendaraan Roda Empat dan jalan kaki
FOTO
Foto Lokasi Ke Arah UTARA
Foto Lokasi Ke Arah TIMUR
Foto Lokasi Ke Arah SELATAN
Foto Lokasi Ke Arah BARAT
SKETSA
`
Sketsa Umum
Sketsa Detail
SATKER BALAI WILAYAH SUNGAI SULAWESI I
BM Sungai
Likupang
Metoda Pengukuran
Statik Diffrensial
Lokasi
KEL : Kalinaun KEC : Likupang Timur KAB : Minahasa Utara PROV : Sulawesi UtaraKoordinat Geografi
L: 1°39'27.18037"N B: 125°03'43.48529"E Height :81.504Koordinat UTM 51North
X: 729412.203 Y: 183329.055 Elevasi :81.504Receiver
Trimble
Antena
Trimble R4
Tinggi Antena
Miring/ Tegak ; Sebelum : 1. 375
Sesudah : 1. 375
Uraian Lokasi : Terletak di bawah jembatan Kijang, di jalan poros Likupang - Girian
Kenampakan Menonjol :
Jalan Ke Lokasi :
Transportasi & Akomodasi ke lokasi : Kendaraan Roda Empat dan jalan kaki
FOTO
Foto Lokasi Ke Arah UTARA
Foto Lokasi Ke Arah TIMUR
Foto Lokasi Ke Arah SELATAN
Foto Lokasi Ke Arah BARAT
SKETSA
`
Sketsa Umum
Sketsa Detail
SATKER BALAI WILAYAH SUNGAI SULAWESI I
BM Sungai
Mokupa
Metoda Pengukuran
Statik Diffrensial
Lokasi
KEL : Mokupa Dua KEC : Tombairi KAB : Minahasa PROV : Sulawesi UtaraKoordinat Geografi
L: 1°25'04.54794"N B: 124°42'47.76812"E Height :82.586Koordinat UTM 51North
X: 690614.515 Y: 156794.724 Elevasi :82.586Receiver
Trimble
Antena
Trimble R4
Tinggi Antena
Miring/ Tegak ; Sebelum : 1. 345
Sesudah : 1.345
Uraian Lokasi : Berada di Jalan Trans Sulawesi, sekitar 500 meter di sebelah utara Tasikria Resort
Kenampakan Menonjol :
Jalan Ke Lokasi :
Transportasi & Akomodasi ke lokasi : Kendaraan Roda Empat
FOTO
Foto Lokasi Ke Arah UTARA
Foto Lokasi Ke Arah TIMUR
Foto Lokasi Ke Arah SELATAN
Foto Lokasi Ke Arah BARAT
SKETSA
`
Sketsa Umum
Sketsa Detail
SATKER BALAI WILAYAH SUNGAI SULAWESI I
BM Sungai Paniki
Metoda Pengukuran
Statik Diffrensial
Lokasi
KEL : Paniki KEC : TombairiKAB : Minahasa PROV : Sulawesi Utara
Koordinat Geografi
L: 1°23'45.22385"N B: 124°40'57.58079"E Height :77.325Koordinat UTM 51North
X: 687209.946 Y: 154355.684 Elevasi :77.325Receiver
Trimble
Antena
Trimble R4
Tinggi Antena
Miring/ Tegak ; Sebelum : 1. 372
Sesudah : 1. 372
Uraian Lokasi : Berada di Jalan Trans Sulawesi, berada di sebelah tenggara jalan
Kenampakan Menonjol : Terdapat rumah penduduk di sebelah utara sungai (di timur jalan)
Jalan Ke Lokasi :
Transportasi & Akomodasi ke lokasi : Kendaraan Roda Empat
FOTO
Foto Lokasi Ke Arah UTARA
Foto Lokasi Ke Arah TIMUR
Foto Lokasi Ke Arah SELATAN
Foto Lokasi Ke Arah BARAT
SKETSA
`
Sketsa Umum
Sketsa Detail
SATKER BALAI WILAYAH SUNGAI SULAWESI I
BM Sungai
Panasen
Metoda Pengukuran
Statik Diffrensial
Lokasi
KEL : Panasen KEC : KakasKAB : Minahasa PROV : Sulawesi Utara
Koordinat Geografi
L: 1°11'04.07061"N B: 124°52'25.52392"E Height :763.417Koordinat UTM 51North
X: 708495.334 Y: 130989.547 Elevasi :763.417Receiver
Trimble
Antena
Trimble R4
Tinggi Antena
Miring/ Tegak ; Sebelum : 1. 313
Sesudah : 1. 313
Uraian Lokasi :
Kenampakan Menonjol : Titik berada di sebelah utara jalan poros Kakas-Tondano. Berada di pinggir jalan
area persawahan, sekitar 800 meter di sebelah timur laut BM adalah danau Tondano
Jalan Ke Lokasi :
Transportasi & Akomodasi ke lokasi : Kendaraan Roda Empat
FOTO
Foto Lokasi Ke Arah UTARA
Foto Lokasi Ke Arah TIMUR
Foto Lokasi Ke Arah SELATAN
Foto Lokasi Ke Arah BARAT
SKETSA
`
Sketsa Umum
Sketsa Detail
SATKER BALAI WILAYAH SUNGAI SULAWESI I
BM Sungai
Ranowelang
Metoda Pengukuran
Statik Diffrensial
Lokasi
KEL : Talikuran KEC : KakasKAB : Minahasa PROV : Sulawesi Utara
Koordinat Geografi
L: 1°10'43.96722"N B: 124°53'02.66369"E Height :760.697Koordinat UTM 51North
X: 709644.110 Y: 130372.757 Elevasi :760.697Receiver
Trimble
Antena
Trimble R4
Tinggi Antena
Miring/ Tegak ; Sebelum : 1. 218
Sesudah : 1. 218
Uraian Lokasi :
Kenampakan Menonjol : Terdapat rumah dan minimarket sebelah timur BM
Jalan Ke Lokasi :
Transportasi & Akomodasi ke lokasi : Kendaraan Roda Empat
FOTO
Foto Lokasi Ke Arah UTARA
Foto Lokasi Ke Arah TIMUR
Foto Lokasi Ke Arah SELATAN
Foto Lokasi Ke Arah BARAT
SKETSA
`
Sketsa Umum
Sketsa Detail
SATKER BALAI WILAYAH SUNGAI SULAWESI I
BM Sungai
Makalu
Metoda Pengukuran
Statik Diffrensial
Lokasi
KEL : Makalu KEC : PusomaenKAB : Minahasa Tenggara PROV : Sulawesi Utara
Koordinat Geografi
L: 0°59'09.21790"N B: 124°52'01.16073"E Height :81.191Koordinat UTM 51North
X: 707755.588 Y: 109029.259 Elevasi :81.191Receiver
Trimble
Antena
Trimble R4
Tinggi Antena
Miring/ Tegak ; Sebelum : 1. 245
Sesudah : 1.245
Uraian Lokasi : Titik berada di sebelah selatan jalan trans Minahasa Tenggara-Minahasa, berada sekitar 300
meter di sebelah barat GMIM Immanuel
Kenampakan Menonjol : Terdapat rumah penduduk di sebelah selatan BM. BM berada di dalam tembok
batas sungai.
Jalan Ke Lokasi :
Transportasi & Akomodasi ke lokasi : Kendaraan Roda Empat
FOTO
Foto Lokasi Ke Arah UTARA
Foto Lokasi Ke Arah TIMUR
Foto Lokasi Ke Arah SELATAN
Foto Lokasi Ke Arah BARAT
SKETSA
`
Sketsa Umum
Sketsa Detail
SATKER BALAI WILAYAH SUNGAI SULAWESI I
BM Sungai
Wowosan
Metoda Pengukuran
Statik Diffrensial
Lokasi
KEL : Wowosan KEC : BelangKAB : Minahasa Tenggara PROV : Sulawesi Utara
Koordinat Geografi
L: 0°56'21.23457"N B: 124°47'05.79630"E Height :76.032Koordinat UTM 51North
X: 698625.335 Y: 103864.158 Elevasi :76.032Receiver
Trimble
Antena
Trimble R4
Tinggi Antena
Miring/ Tegak ; Sebelum : 1. 377
Sesudah : 1. 377
Uraian Lokasi : Titik berada di sebelah barat Jalan Poros Ratahan-Kotamubagu
Kenampakan Menonjol : Terdapat masjid di sebelah selatan BM
Jalan Ke Lokasi :
Transportasi & Akomodasi ke lokasi : Kendaraan Roda Empat
FOTO
Foto Lokasi Ke Arah UTARA
Foto Lokasi Ke Arah TIMUR
Foto Lokasi Ke Arah SELATAN
Foto Lokasi Ke Arah BARAT
SKETSA
`
Sketsa Umum
Sketsa Detail
SATKER BALAI WILAYAH SUNGAI SULAWESI I
--- COMMENT 0.6519D-08 0.2235D-07 -0.5960D-07 -0.1192D-06 ION ALPHA 0.8602D+05 0.9830D+05 -0.6554D+05 -0.5243D+06 ION BETA
-0.465661287308D-08-0.142108547152D-13 319488 1951 DELTA-UTC: A0,A1,T,W 18 LEAP SECONDS
END OF HEADER 31 17 05 29 04 00 0.0 0.198164023459D-03-0.238742359215D-11 0.000000000000D+00
--- COMMENT 0.6519D-08 0.2235D-07 -0.5960D-07 -0.1192D-06 ION ALPHA 0.8602D+05 0.9830D+05 -0.6554D+05 -0.5243D+06 ION BETA
-0.465661287308D-08-0.142108547152D-13 319488 1951 DELTA-UTC: A0,A1,T,W 18 LEAP SECONDS
END OF HEADER 6 17 05 29 10 00 0.0 0.357236247510D-03 0.500222085975D-11 0.000000000000D+00
--- COMMENT 0.6519D-08 0.2235D-07 -0.5960D-07 -0.1192D-06 ION ALPHA 0.8602D+05 0.9830D+05 -0.6554D+05 -0.5243D+06 ION BETA
-0.279396772385D-08-0.177635683940D-14 503808 1951 DELTA-UTC: A0,A1,T,W
18 LEAP SECONDS
END OF HEADER 11 17 05 31 07 59 44.0-0.691927038133D-03-0.272848410532D-11 0.000000000000D+00
--- COMMENT 0.6519D-08 0.2235D-07 -0.5960D-07 -0.1192D-06 ION ALPHA 0.8602D+05 0.9830D+05 -0.6554D+05 -0.5243D+06 ION BETA
-0.279396772385D-08-0.177635683940D-14 503808 1951 DELTA-UTC: A0,A1,T,W 18 LEAP SECONDS