Algoritma Filter Kalman pada Sistem Tidak Stabil Tereduksi - ITS Repository
Teks penuh
Gambar



Dokumen terkait
Penggunaan algoritma Kalman Filter ini dimaksutkan agar didapatkan nilai data sensor dari IMU yang akurat dan stabil dengan noise yang kecil sehingga dapat digunakan
Namun saat terlaksananya kerja praktek mahasiswa, digunakan metode Kalman Filter untuk mengestimasi prediksi inflasi pada bulan berikutnya dengan menggunakan
Pada extended kalman filter, sama halnya dengan kalman filter, estimasi dilakukan dengan dua tahapan, yaitu dengan cara memprediksi variabel keadaan berdasarkan sistem dinamik
Abstrak: Tujuan penelitian untuk menerapkan algoritma filter Kalman robust pada kondisi rician fading non stasioner berdasarkan analisis perbandingan jumlah nulling ,
Kalman filter digunakan untuk mendapatkan sudut kemiringan agar lebih akurat. Pada skripsi ini, kalman filter akan memanfaatkan dua data masukan. Masukan pertama adalah
Kontrol kestabilan menggunakan hasil pembacaan sensor IMU yang kemudian dilakukan penggabungan data sensor dengan mengimplementasikan algoritma fusion sensor Kalman Filter
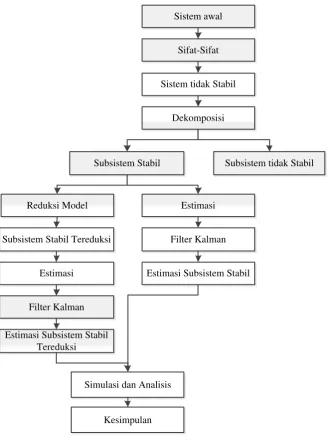
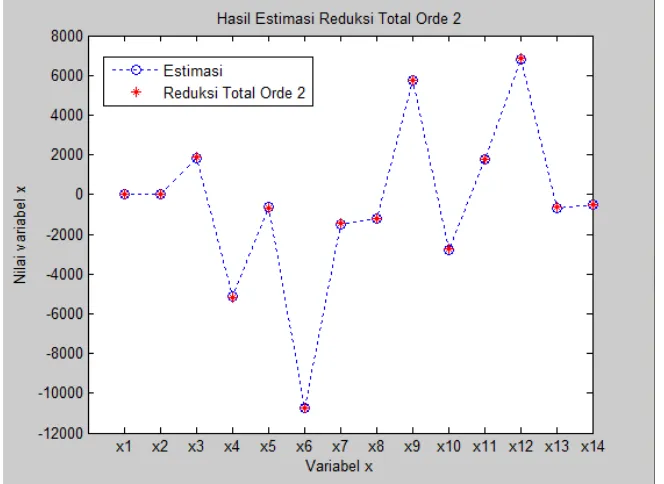
a) Dapat diperoleh sistem akhir tereduksi dari sistem tidak stabil model aliran sungai saint venant dengan pendiskritan = 5 menggunakan metode pemotongan
Volume 4 Nomor 2 Juli 2022 e-ISSN : 2715-0887 p-ISSN : 2654-7813 Jambura Journal of Electrical and Electronics Engineering Algoritma Hibrid Extended Kalman Filter dan Inferensi Fuzzy
