T
T
E
E
O
O
R
R
I
I
D
D
A
A
S
S
A
A
R
R
2.1
TEORI GELOMBANG LINEAR
Dalam suatu analisis perencanaan bangunan atau struktur yang berhubungan dengan laut, maka Teori Gelombang Linear merupakan asumsi atau penyederhanaan atas analisis yang dilakukan untuk mengetahui dampak dari gelombang laut terhadap bangunan atau struktur tersebut. Untuk studi kasus yang dibahas dalam Tugas Akhir ini, yaitu kasus Pipeline Freespan, maka Teori Gelombang Linear diperlukan untuk analisis gaya‐gaya yang terjadi kepada pipa akibat gelombang laut. Seluruh penurunan teori yang berkaitan dengan gelombang laut dikutip dari referensi Water Wave Mechanic, Dean&Dalrymple, 1984.
2.1.1 HUKUM KEKEKALAN MASSA
Dalam penurunan teori gelombang linear, dengan memperhatikan bahwa gelombang bergerak pada media air, maka penurunan persamaan yang mengatur Teori Gelombang Linear tersebut diturunkan dari Hukum Kekekalan Massa. Hukum Kekekalan Massa menyatakan bahwa massa tidak dapat diciptakan atau dimusnahkan begitu saja, tetapi dapat diubah atau ditransformasi. Untuk penerapannya dalam fluida, persamaan dari Hukum Kekekalan Massa ini dinyatakan sebagai berikut:
Laju perubahan massa (terhadap waktu) = Laju aliran massa masuk – laju aliran massa keluar.
Sebagai ilustrasi, maka dapat ditinjau dari sketsa dibawah ini yang menunjukkan konsep matematisnya, untuk aliran massa yang masuk dan keluar dalam arah X ditunjukkan oleh gambar 2.1.
BAB
Gambar 2.1 Ruang tinjau kubus dalam fluida.
Pada setiap sisi kubus yang tegak lurus terhadap Δx , Δy, Δz pada kubus fluida, maka jumlah rata‐rata massa fluida yang masuk harus sama dengan jumlah rata‐rata massa fluida yang keluar dari kubus. Dilihat dari ruang tinjau kubus dalam fluida bergerak, maka besarnya fluks aliran massa yang masuk kedalam sistem kubus pada sisi tegak lurus Δx (arah – X) adalah: - , , . - , , 2 2 x x x y z u x y z y z
ρ
⎛⎜ Δ ⎞ ⎛⎟ ⎜ Δ ⎞ Δ Δ⎟ ⎝ ⎠ ⎝ ⎠ . ... (2.1) Atau fluks aliran massa yang masuk (arah‐X) ke dalam sistem kubus tersebut diekspresikan ke dalam deret Taylor sebagai berikut: ( ) ( , , ). ( , , ) - . ... . 2 u x x y z u x y z y z xρ
ρ
∂ Δ ⎡ + ⎤Δ Δ ⎢ ∂ ⎥ ⎣ ⎦ ... (2.2) Maka, fluks aliran massa yang keluar dari sisi kubus tegak lurus Δx (arah‐X) Dan besarnya fluks aliran massa yang keluar dari kubus adalah: , , . , , 2 2 x x x y z u x y z y zρ
⎛⎜ +Δ ⎞ ⎛⎟ ⎜ +Δ ⎞⎟Δ Δ ⎝ ⎠ ⎝ ⎠ ... (2.3) Atau diekspresikan ke dalam deret Taylor sebagai berikut: ( ) ( , , ). ( , , ) . ... . 2 u x x y z u x y z y z xρ
ρ
∂ Δ ⎡ + + ⎤Δ Δ ⎢ ∂ ⎥ ⎣ ⎦ ... (2.4)Dengan meninjau besarnya fluks aliran massa yang masuk dan fluks aliran massa yang keluar dalam arah X, maka selisih massa yang masuk dan keluar adalah sebesar :
( ) . . . u x y z x
ρ
∂ − Δ Δ Δ ∂ ... (2.5) Sama halnya untuk fluks aliran massa dalam arah Y maupun Z, sehingga selisih fluks aliran massa yang masuk dan keluar untuk arah Y adalah:(
)
. . .
v
x y z
y
ρ
∂
−
Δ Δ Δ
∂
... (2.6) dan selisih fluks aliran massa untuk arah Z adalah: ( w). . .x y z zρ
∂ − Δ Δ Δ ∂ ... (2.7) Maka, besarnya fluks aliran massa total netto dalam ruang tinjau kubus dalam fluida adalah sebagai berikut: 4(
)
( )
(
)
. .
( )
u
v
w
x y z
x
x
y
z
ρ
ρ
ρ
ο
⎡
∂
∂
∂
⎤
−
⎢
+
+
⎥
Δ Δ Δ + Δ
∂
∂
∂
⎣
⎦
... (2.8) Notasiο
( )
Δ
x
4 menunjukkan bahwa deret mengandung derajat atau pangkat tinggi. Sehingga laju perubahan massa di ruang kubus selama selang waktu Δt sebagai berikut:[
(t t) ( )t]
x y z. . ( . . )x y z tρ
ρ
+ Δ −ρ
Δ Δ Δ = ∂ Δ Δ Δ ∂ ... (2.9) Dimanaρ
(t+ Δt)adalah massa di ruang kubus pada waktu(t+ Δt)dan,...
ρ
( )t adalah massa di ruang kubus pada waktu( )t Dengan menggunakan Hukum Kekekalan Massa, dimana fluks aliran massa netto = laju perubahan massa dalam ruang kubus, didapat persamaan:(
)
(
)
(
)
. .
( . . )
u
v
w
x y z
x y z
x
y
z
t
ρ
ρ
ρ
ρ
⎡
∂
∂
∂
⎤
∂
−
⎢
+
+
⎥
Δ Δ Δ =
Δ Δ Δ
∂
∂
∂
∂
⎣
⎦
... (2.10) Jika disederhanakan menjadi:(
)
(
)
(
)
0
u
v
w
t
x
y
z
ρ
ρ
ρ
ρ
∂
∂
∂
∂
+
+
+
=
∂
∂
∂
∂
... (2.11)Dan jika diuraikan untuk setiap suku, maka persamaan menjadi:
0
u
v
w
u
v
w
t
x
y
z
x
y
z
ρ
ρ
⎛
⎞
ρ
ρ
ρ
∂
+
∂
+
∂
+
∂
+
∂
+
∂
+
∂
=
⎜
⎟
∂
⎝
∂
∂
∂
⎠
∂
∂
∂
... (2.12) Atau yang lebih dikenal sebagai persamaan konservasi massa sebagai berikut:1
0
u
v
w
u
v
w
t
x
y
z
x
y
z
ρ
ρ
ρ
ρ
ρ
⎡
∂
∂
∂
∂
⎤
∂
∂
∂
+
+
+
+
+
+
=
⎢
∂
∂
∂
∂
⎥
∂
∂
∂
⎣
⎦
... (2.13)Dengan membagi seluruh ruas persamaan dengan ρ lalu menyederhanakan seluruh ruas turunan ρ terhadap t menjadi D Dt
ρ
, dan kecepatan aliran adalah: u x t ∂ = ∂ untuk kecepatan aliran arah sumbu‐X y v t ∂ =∂ untuk kecepatan aliran arah sumbu‐Y, dan
z w
t ∂ =
∂ untuk kecepatan aliran arah sumbu‐Z, maka persamaan Kontinuitas didapatkan dengan mensubstitusikan kecepatan aliran untuk tiap sumbu tersebut ke persamaan…… Maka persamaan Kontinuitas adalah:
1
0
D
u
v
w
Dt
x
y
z
ρ
ρ
∂
∂
∂
+
+
+
=
∂
∂
∂
... (2.14)Untuk fluida incompressible, dimana massa jenis fluida tidak berubah terhadap waktu, maka D Dt
ρ
=0, sehingga persamaan Kontinuitas menjadi sebagai berikut:0
u
v
w
x
y
z
∂
+
∂
+
∂
=
∂
∂
∂
... (2.15)Untuk penurunan Teori Gelombang Linear, dimana sifat utama fluida media perambatan gelombang adalah fluida irrorational, maka diperkenalkan variabel
φ
atau potensial kecepatan, dan.U 0
∇ = . U adalah vektor kecepatan aliran fluida, dimana U x y z t( , , , )=u i v j w k.+ .+ .dan U = ∇.
φ
, maka. .
φ
0Maka, persamaan diatas diuraikan menjadi 2 2 2 0 x y z
φ
⎡⎛ ∂ ⎞ ⎛ ∂ ⎞ ⎛ ∂ ⎞ ⎤ + + = ⎢⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎥ ∂ ∂ ∂ ⎝ ⎠ ⎝ ⎠ ⎢ ⎝ ⎠ ⎥ ⎣ ⎦ ... (2.17) Atau persamaan dapat dituliskan dalam bentuk lain sebagai berikut: 2 2 2 2 2 20
x
y
z
φ
φ
φ
∂
+
∂
+
∂
=
∂
∂
∂
... (2.18)Dan, persamaan … diatas selanjutnya dikenal sebagai Persamaan Laplace.
2.1.2 PARAMETER GELOMBANG
Gelombang merupakan suatu hasil dari diberinya suatu gaya dengan besar dan waktu tertentu kepada suatu media. Untuk bahasan kali ini, media perambatan gelombang adalah fluida air. Tiupan angin pada durasi dan kecepatan tertentu membangkitkan sebagian besar gelombang di permukaan lautan. Ketika gelombang terbentuk, gaya gravitasi dan tegangan permukaan akan bereaksi untuk menimbulkan rambatan gelombang.
Penjelasan eksak untuk mendeskripsikan gelombang yang beramplitudo kecil di perairan dalam adalah bahwa gelombang diasumsikan berbentuk sinusoidal. Pemilihan bentuk gelombang ini dikarenakan telah diketahuinya perambatan gelombang pada seutas tali yang digetarkan berbentuk sinusoidal dengan puncak dan lembah gelombang.
Untuk gelombang laut, terdapat beberapa parameter penting untuk mendeskripsikannya, yaitu:
9 Panjang gelombang, L. Adalah jarak horizontal antara dua puncak gelombang atau dua lembah gelombang yang saling berurutan.
9 Tinggi gelombang, H. Adalah jarak vertikal dari puncak gelombang ke lembah gelombang.
9 Perioda gelombang, T. Adalah selang waktu yang ditempuh untuk menempuh satu panjang gelombang, dari puncak ke puncak atau lembah ke lembah yang berurutan.
9 Kedalaman perairan, h. Adalah kedalaman perairan dimana gelombang tersebut dirambatkan.
9 Amplitudo gelombang, A. adalah simpangan terbesar dari titik simpul gelombang ke puncak atau lembah gelombang.
Parameter‐parameter lainnya, seperti potensial kecepatan, kecepatan rambat gelombang, kecepatan partikel air, dan lainnya, akan dijelaskan berikutnya. Gambar 2.2 dibawah ini akan menunjukkan sketsa profil gelombang.
Gambar 2.2 Sketsa profil gelombang air.
Untuk menurunkan persamaan‐persamaan Teori Gelombang Linear, dibutuhkan persamaan pengatur yang bersifat umum. Persamaan pengatur dalam hal ini adalah persamaan Laplace yang telah diturunkan dalam subbab 2.1.1. Sedangkan untuk mendapatkan persamaan‐persamaan solusi yang bersifat khusus, maka diperlukan syarat‐syarat batas.
2.1.3 SYARAT BATAS
Solusi tepat dari persamaan pengatur tentang Teori Gelombang Linear ini sulit ditentukan karena syarat batas permukaan memiliki suku‐suku tak linear, dimana terdapat perkalian antar variabel, dan nilai z =
η
( , )x t tidak diketahui. Oleh karena itu, maka dilakukan pelinearan agar tidak terdapat perkalian antar variabel tersebut.Pelinearan yang dilakukan mengambil asumsi bahwa tinggi gelombang H jauh lebih kecil dari panjang gelombang L dan kedalaman perairan h. Dasar asumsi inilah, yaitu H<<L,h yang menjadikan teori gelombang ini disebut Teori Gelombang Linear. Dengan asumsi ini maka nilai suku‐suku non linear dapat diabaikan dan syarat batas juga dapat diterapkan di z=0.
a) Syarat batas pertama adalah syarat batas kinematis (Kinematic Free Surface Boundary Condition) yaitu:
. z t x x
φ
η
φ η
∂ ∂ ∂ ∂ − = − ∂ ∂ ∂ ∂ pada z =η
( , )x t ... (2.19) Maka, dengan pelinearan didapat: z tφ
η
∂ ∂ − = ∂ ∂ padaz
=
0
... (2.20) b) Syarat batas yang kedua adalah syarat batas dinamis (Dynamic Free Surface BoundaryCondition) yaitu: 2 2
1
( )
2
g
C t
t
x
z
φ
⎡
φ
φ
⎤
η
∂
⎛
∂
⎞
⎛
∂
⎞
−
+
⎢
⎜
⎟
+
⎜
⎟
⎥
+
=
∂
⎣
⎢
⎝
∂
⎠
⎝
∂
⎠
⎦
⎥
pada z =η
( , )x t ... (2.21) Maka, dengan pelinearan didapat: ( ) g C t zφ
η
∂ − + = ∂ padaz
=
0
... (2.22) c) Syarat batas ketiga adalah syarat batas dasar perairan (Bottom Boundary Condition),ditentukan pada z=‐h. Syarat batas diambil dengan asumsi tidak ada kecepatan aliran atau partikel yang masuk kedalam dasar perairan dikarenakan dasar perairan yang impermeable. . h 0 u w x ∂ + = ∂ atau w h u x ∂ = − ∂ ... (2.23) Suku h x ∂
∂ pada persamaan menunjukkan bahwa arah kecepatan partikel merupakan fungsi dari jarak horizontal atau dengan kata lain tangensial terhadap dasar perairan. Untuk dasar perairan yang datar maka: 0 w z
φ
∂ = − = ∂ padaz
= −
h
, ... (2.24) Maka kecepatan partikel tegak lurus dasar perairan adalah nol. d) Syarat batas terakhir adalah syarat batas periodik. Syarat batas ini menunjukkan bahwa gelombang bergerak terhadap ruang dan waktu. ( , ) ( , ) ( , ) ( , ) x t x L t x t x t Tφ
φ
φ
φ
= + = + ... (2.25)2.1.4 PERSAMAAN SOLUSI TEORI GELOMBANG LINEAR
Dari persamaan laplace dan syarat batas yang diterapkan padanya, maka persamaan Laplace tersebut dapat diselesaikan dengan metoda pemisahan variabel, sehingga untuk gelombang berjalan didapatkan Persamaan potensial kecepatan
φ
sebagai berikut.cosh ( ) . .sin( ) 2 cosh gH k h z kx t kh
φ
ω
ω
+ = − − ... (2.26) Dari syarat batas dinamis, dimana pada z=0 terdapatη
=0 dan C(t)=0, maka1
g t
φ
η
= −
∂
∂
padaz
=
0
, sehingga, cos( ) 2 H kx tη
= −ω
... (2.27)Dengan menurunkan η terhadap t, dan Φ terhadap z dan mensubtitusikannya ke syarat batas kinematis, diturunkan suatu persamaan baru yang disebut dengan Persamaan Dispersi sebagai berikut. 2
gk
tanh
kh
ω
=
, ... (2.28) dimana 2 Tπ
ω
= , dan besaran bilangan gelombang k, dimana k 2 Lπ
= .Maka, persamaan yang menunjukkan bahwa gelombang berjalan atau merambat pada semua tipikal perairan diberikan oleh Persamaan cepat rambat gelombang berikut ini.
2 2 2 2 . .tanh h g T L L
π
π
π
⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ , disederhanakan menjadi 2 2 2.tanh
L
g
C
kh
k
T
=
=
atauC
g
tanh
kh
k
=
... (2.29)Dan Persamaan panjang gelombang;
2 .tanh 2 gT L kh
π
= ... (2.30) Dengan memperhatikan perilaku gelombang yang berbeda untuk tiap tipikal perairan, maka untuk laut dalam dimana h>> sehingga kh menjadi besar maka tanh kh≈1 atau kh=1. Maka panjang gelombang dan cepat rambat gelombang di laut dalam adalah:2 2 o gT L
π
= danC
oL
oT
=
... (2.31) Sedangkan untuk laut dangkal, dimana h<< sehingga kh menjadi kecil (diabaikan), maka tanh kh≈kh. Maka panjang gelombang dan cepat rambat gelombang di laut dangkal adalah: 2 2 . 2 gT h L Lπ
π
= dan C = gh ... (2.32)Maka dari itu, dalam Teori Gelombang Linear ini persamaan gelombangnya diklasifikasikan menjadi tiga jenis perairan dengan syarat batas tertentu yang ditunjukkan oleh gambar 2.3.
Gambar 2.3 Klasifikasi gelombang sesuai tipe perairan dan sketsa trayektori partikel air.
2.1.5 KECEPATAN DAN PERCEPATAN PARTIKEL AIR
Dengan telah diketahuinya persamaan potensial kecepatan, maka kecepatan dan percepatan partikel air dapat diturunkan. Kedua persamaan ini diturunkan dari persamaan potensial kecepatan. Kecepatan partikel air merupakan turunan (differensial) potensial kecepatan terhadap arah gerak partikel. Percepatan partikel merupakan turunan (differensial) kecepatan partikel air terhadap waktu. Kecepatan partikel air pada arah horizontal u: cosh ( ) . .cos( ) 2 cosh gHk k h z u kx t x kh
φ
ω
ω
∂ + = − = − ∂ ... (2.33) Kecepatan partikel air arah vertikal w: sinh ( ) . .sin( ) 2 cosh gHk k h z w kx t z khφ
ω
ω
∂ + = − = − ∂ ... (2.34) Dan, untuk percepatan partikel air arah horizontal u: cosh ( ) . .sin( ) 2 cosh u u gHk k h z a kx t t khω
∂ + = = − ∂ ... (2.35) Percepatan partikel air arah vertikal w: sinh ( ) . .cos( ) 2 cosh w w gHk k h z a kx t t khω
∂ + = = − − ∂ ... (2.36) Menurut Teori Gelombang Linear, gelombang yang merambat dalam media air hanya dirambatkan saja, akan tetapi massa airnya tidak berpindah melainkan hanya berputar‐putar saja dalam trayektori tertentu yang berbentuk elips atau lingkaran. Kecepatan partikel air yang dibahas ini adalah kecepatan partikel air tersebut berputar atau bergerak dalam trayektori tersebut. Untuk perairan dangkal, trayektori partikel air cenderung elipsoidal, dan untuk periaran dalam memiliki trayektori partikel air yang cenderung bulat. Gambar 2.4 akan menunjukkan perpindahan atau pergerakan partikel air untuk periaran dangkal dan dalam.
Gambar 2.4 Ilustrasi pergerakan partikel air untuk perairan dangkal dan dalam (CEM, 2001).
Oleh karena itu, kecepatan dan percepatan partikel air untuk tiap arah merupakan fungsi dari posisi, dan memiliki beda fasa sebesar 900. Ilustrasi perbedaan fasanya ditunjukkan oleh gambar 2.5. Kecepatan partikel air untuk arah horizontal bernilai maksimum pada fasa (kx−
ω
t) 0, , 2 ,...=π π
, dan kecepatan partikel air untuk arah vertikal bernilai maksimum pada fasa 3 ( ) , ,... 2 2 kx−ω
t =π π
2.2
TEORI GAYA GELOMBANG
Perhitungan gaya‐gaya hidrodinamika yang bekerja pada suatu struktur lepas pantai ataupun pipa bawah laut belum dapat dihitung secara eksak, baik dengan penurunan secara percobaan maupun teoritis. Oleh karena itu, digunakan metoda penyederhanaan untuk mendekati perhitungan gaya hidrodinamik pada struktur laut tersebut.
Salah satu metoda pendekatan perhitungan gaya hidrodinamika adalah dengan metoda Morrison. Metoda ini menghitung gaya hidrodinamika yang terjadi pada suatu struktur akibat gelombang laut di permukaan. Metoda ini cocok untuk diterapkan pada struktur lepas pantai maupun pipa bawah laut, dikarenakan perbandingan antara dimensi struktur terhadap panjang gelombang relatif kecil. Kriteria batas dapat digunakannya metoda Morrison adalah D/L ≤ 0.2, dimana D adalah diameter struktur dan L adalah panjang gelombang.
Pada kasus suatu gaya hidrodinamika mengenai suatu struktur pipa bawah laut, maka diasumsikan diameter terluar dari pipa tersebut masih jauh lebih kecil dari panjang gelombang laut, sehingga gelombang tersebut melewati struktur tanpa gangguan yang berarti. Gelombang yang bergerak melewati struktur tersebut tidak terganggu, akan tetapi pengaruh terhadap struktur terjadi akibat adanya vortex (wake formation) yang terbentuk di belakang struktur dan flow separation. Gaya hidrodinamika yang terjadi pada struktur adalah gaya inersia dan gaya seret.
Pada teori gaya gelombang Morrison ini, gaya hidrodinamika yang terjadi diturunkan dari fluktuasi gelombang laut pada lokasi tersebut. Adanya gelombang laut yang merambat di permukaan menyebabkan arus pada perairan tersebut. Arus yang terjadi akibat gelombang ini disebut dengan wave induced current. Arus ini terjadi akibat pergerakan partikel air di bawah gelombang pada trayektori elips atau lingkaran (lihat gambar 2.3, 2.4 dan 2.5). Oleh karena itu, arus akibat gelombang ini hanya bersifat lokal dan memiliki fasa tertentu dimana besarnya dapat bernilai maksimum atau minimum.
Gaya gelombang Morrison yang terjadi pada suatu struktur adalah penjumlahan dari gaya inersia dan gaya seret. Gaya seret (drag force) terjadi akibat gaya gesekan yang terjadi antara fluida dan dinding pipa (skin friction), dan vortex yang terjadi di belakang struktur (gambar 2.6). Gaya inersia terjadi pada struktur akibat gaya oleh perubahan perpindahan massa air yang disebabkan oleh keberadaan pipa. Perubahan perpindahan massa diakibatkan oleh adanya fluktuasi percepatan arus (gambar 2.7). Pada intinya, faktor yang mempengaruhi gaya seret adalah kecepatan partikel air. Sedangkan faktor yang mempengaruhi gaya inersia adalah percepatan partikel air.
2.2.1 GAYA SERET (DRAG FORCE)
Nilai gaya seret (drag force) yang terjadi pada suatu struktur silinder dapat dituliskan dengan persamaan berikut ini. 1 . . . . . 2 D D P f =
ρ
C A U U atau 1. . . . . 2 D D f =ρ
C DU U ... (2.37) Dimana: fd = gaya seret per satuan panjang D = diameter pipa/silinder ρ = massa jenis air U = kecepatan arus total PA = luas proyeksi pipa per satuan panjang CD = koefisien drag
Adanya tanda absolut menyatakan bahwa arah gaya harus dan pasti searah dengan arah arusnya. Kecepatan arus total adalah jumlah atau superposisi dari kecepatan arus akibat gelombang (wave‐induced current) dan kecepatan arus pasut (tidal current). Luas proyeksi pipa merupakan proyeksi pipa dari tampak depan tegak lurus arah arus.
Besar kecepatan dan percepatan partikel air ini didapat dari penurunan teori gelombang
linear, teori Stokes orde‐5, teori gelombang Solitary, teori gelombang Cnoidal, steram function dan sebagainya. Pemilihan teori gelombang yang akan digunakan bergantung pada karakteristik kondisi laut yang dimodelkan atau dilakukan analisis. Untuk penyederhanaan dalam tugas akhir ini, digunakan teori gelombang linear untuk memperoleh besar kecepatan dan percepatan partikel air dari penurunan terhadap potensial kecepatan.
2.2.2 GAYA INERSIA (INERSIA FORCE)
Gaya inersia terjadi pada struktur akibat gaya oleh perubahan perpindahan massa air yang disebabkan oleh keberadaan pipa. Faktor yang mempengaruhi gaya inersia adalah percepatan partikel air. Perubahan perpindahan massa diakibatkan oleh adanya fluktuasi percepatan arus. Nilai gaya inersia yang terjadi pada suatu struktur silinder dapat dituliskan dengan persamaan berikut ini.
. . . I I f =
ρ
C V U• atau fIρ
. . .C A UI • = ... (2.38) Dimana; fI = gaya inersia per satuan panjang V = volume pipa per satuan panjangA = luas penampang pipa CI = koefisien inersia = CM + 1
U
• = percepatan arus CM = koefisien added mass
2.2.3 GAYA MORRISON TOTAL
Maka, gaya morrison total per satuan panjang yang terjadi pada pipa adalah jumlah dari gaya seret dan gaya inersia, dan dituliskan oleh persamaan berikut ini. 1 . . . . 2 T D I f =
ρ
C D U U +ρ
C A U• ... (2.39)Pada suatu kasus dimana diameter struktur cukup besar dibanding panjang gelombang, mencapai D/L > 0.2, maka pengaruh gaya seret akibat gelombang akan menjadi tidak signifikan akibat vortex yang tidak sempat terbentuk. Dalam kasus ini gaya inersia akan lebih dominan akibat besar volume atau massa air yang terpindahkan akibat adanya struktur tersebut.
2.2.4 GAYA ANGKAT (LIFT FORCE)
Gaya hidrodinamika lainnya adalah gaya angkat (lift force). Gaya ini bekerja dalam arah tegak lurus arah rambatan gelombang/arus. Gaya angkat ini terjadi akibat adanya konsentrasi streamline pada bagian atas pipa. Pada gambar 2.6, terlihat bahwa terdapat konsentrasi streamline di atas pipa. Konsentrasi streamline membuat kecepatan arus pada atas pipa tersebut menjadi besar, sehingga tekanan hidrodinamik mengecil, dan pipa menjadi terangkat. Jika terdapat celah
antara pipa dan seabed, maka konsentrasi streamline akan terjadi, sehingga dengan proses yang sama pipa akan jatuh kembali, atau dengan kata lain gaya angkat yang terjadi bernilai negatif.
Maka, persamaan gaya angkat (lift force) yang terjadi adalah sebagai berikut. 1 . . . . . 2 L L f =
ρ
C DU U ... (2.40) Dimana: CL = koefisien gaya angkat (lift force coefficient)
Gambar 2.6 Ilustrasi konsentrasi streamline yang melewati pipa.
2.2.5 KOEFISIEN GAYA HIDRODINAMIKA
Penentuan koefisien‐koefisien CD, CI, CM, dan CL mengacu pada kode DNV 1981 Submarine
Pipeline Systems. Besarnya koefisien‐koefisien ini bergantung kepada parameter karakteristik kondisi aliran dan pipa. Parameter‐parameter yang mempengaruhi antara lain:
9 Bilangan Reynold;
Re
U D
.
ν
=
(non‐dimensional)dimana
ν
= viskositas kinematik = 1.2363 x 10‐5 ft2/s pada air 600 F.9 Bilangan Keulegan‐Carpenter;
K
CU T
w.
D
=
, T = perioda gelombang (s)9 Kekasaran pipa, dengan parameter k/D, dimana k adalah tinggi kekasaran.
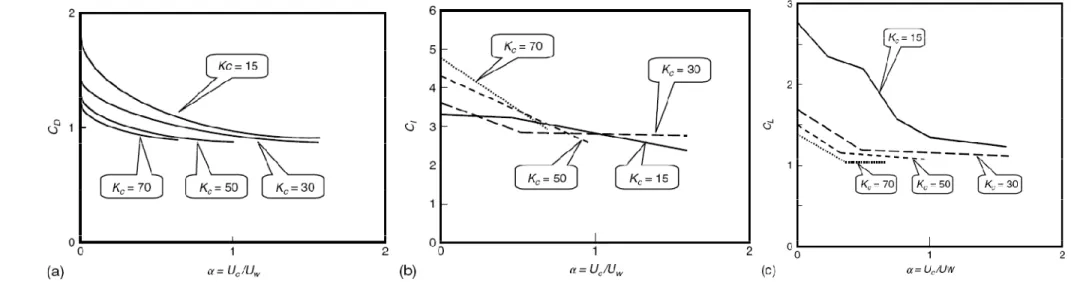
9 Jarak antara pipa dengan batas tetap, dengan parameter H/D, dimana H adalah jarak. Dari parameter‐parameter diatas, maka besar koefisien‐koefisien dapat ditentukan dari grafik‐grafik pada gambar 2.7.
Selain itu, menurut referensi Offshore Pipelines, Guo, 2005, besar koefisien CD dan CL untuk
pipa yang tergeletak di seabed dapat ditentukan dari grafik pada gambar 2.8. Selain itu, besar koefisien CD, CI, dan CL untuk kasus dimana tidal current dan wave‐induced current bekerja
bersamaan menimbulkan gaya, ditunjukkan oleh gambar 2.9.
Untuk keperluan praktis, dapat diambil besar koefisien tersebut dari kode API RP‐2A untuk pendesainan struktur lepas pantai sebagai berikut.
Permukaan smooth CD = 0.65, CM = 1.6
Permukaan rough CD = 1.05, CM = 1.2
Gambar 2.7 Grafik penentuan koefisien hidrodinamika (DNV 1981 Submarine Pipeline Systems).
Gambar 2.8 Grafik penentuan CD dan CL untuk pipa tergeletak pada seabed (Offshore Pipelines, Guo, 2005).
Dari grafik‐grafik diatas maka besar koefisien hidrodinamika dapat ditentukan. Akan tetapi berlaku beberapa syarat dan penyederhanaan mengacu pada DNV 1981 sebagai berikut:
9 Besar koefisien hidrodinamik yang diambil sebaiknya dari hasil percobaan model fisik.
9 Untuk pipa yang tidak dipengaruhi oleh batas tetap seperti seabed, contohnya pada free span, maka koefisien added mass CM =1.
9 Koefisien drag CD adalah fungsi dari bilangan Keulegan‐carpenter KC untuk pipa
smooth yang tertutupi oleh marine growth hanya untuk kondisi aliran superkritis (Fig. A.8) berdasarkan bilangan Reynolds, dan hanya valid untuk aliran yang bebas dari batas tetap (seabed).
9 Besar Koefisien drag CD pada arus steady untuk nilai KC tak hingga adalah asimtot dari
kurva pada grafik.
9 Untuk pipa yang dekat dengan batas bebas (seabed), maka besar koefisien drag CD
harus dikalikan dengan faktor koreksi pada Fig. A.9.
9 Besar koefisien gaya angkat CL untuk aliran steady = 1.
9 Untuk pipa yang dekat dengan batas bebas (seabed), maka besar koefisien gaya angkat CL harus dikalikan dengan faktor koreksi pada Fig. A.11.
Untuk keperluan praktis, berdasarkan bilangan Reynolds untuk pipa terekspos pada aliran steady, maka koefisien hidrodinamika dapat diambil dari tabel 2.1 berikut ini.
Tabel 2.1 Rekomendasi Koefisien Hidrodinamika untuk Aliran Steady (A.H Mouselli, 1981)
Teori gaya Morrison ini hanya dapat diaplikasikan pada struktur yang diasumsikan rigid. Bila struktur memiliki respon dinamik, dengan memiliki kecepatan dan percepatan respon, maka partikel fluida bergerak dengan kecepatan relatif terhadap struktur tersebut. Pada kasus ini, digunakan kecepatan dan percepatan relatif partikel fluida terhadap struktur, atau wave slamming, dengan persamaan Morrison yang juga mengacu pada DNV 1981.
Re
C
DC
LC
M Re < 5.0 x 104 1.3 1.5 2.0 5.0 x 104 < Re < 1.0 x 105 1.2 1 2.0 1.0 x 105 < Re < 2.5 x 105 1.53 ‐ (Re / 3.0 x 105) 1.2 ‐ (Re / 5.0 x 105) 2 2.5 x 105 < Re < 5.0 x 105 0.7 0.7 2.5 ‐ (Re / 5.0 x 105) Re > 5.0 x 105 0.7 0.7 1.52.3
TEORI MEKANIKA TEKNIK
Dalam Tugas Akhir ini, analisis free span pipa bawah laut dilakukan mengacu pada kode DNV RP F‐105. Kode ini mensyaratkan desain free span pipa terhadap kondisi Ultimate Limit State (ULS) dan kondisi Fatigue Limit State (FLS). ULS merupakan syarat kekuatan pipa menahan gaya‐gaya yang bekerja terhadap buckling, atau analisis mekanika teknik secara statis. FLS merupakan syarat kekuatan pipa terhadap Vortex Induced Vibration yang dapat menyebabkan kegagalan pada pipa.
Untuk kasus free span, terdapat gaya‐gaya yang bekerja pada pipa, yaitu gaya internal dan gaya lingkungan dari luar. Gaya‐gaya internal contohnya adalah tekanan internal, tegangan longitudinal. Gaya internal ini pada umumnya disebabkan oleh kondisi instalasi dan operasi pipa. Besarnya gaya atau tegangan dan dampak yang terjadi pada pipa bergantung pada tipe material pipa yang digunakan.
2.3.1 HOOP STRESS
Hoop stress atau tegangan tangensial ini merupakan tegangan yang terjadi akibat tekanan yang diberikan pada suatu silinder dan bekerja pada dinding silinder tersebut. Untuk pipa bawah laut, maka tekanan tersebut diberikan dari dalam pipa dan dari luar pipa. Penurunan persamaan hoop stress menggunakan asumsi silinder berdinding tipis, dimana D (diameter luar) / t (ketebalan dinding) lebih besar dari 20 (D/t > 20). Tekanan dari dalam pipa disebabkan oleh tekanan muatan pipa. Tekanan dari luar pipa disebabkan oleh tekanan hidrostatik akibat pipa berada pada kedalaman tertentu di bawah laut. Resultan antara tekanan internal dan eksternal disebut sebagai P = Po ‐ Pi
Maka resultan keseimbangan gaya vertikal yang terjadi adalah: 0 . . .sin 2. 0 P r d F π θ
θ
θ
− =∫
0 . sin . 2. P r d F π θθ θ
=∫
2. .
P r
=
2.
F
θ atauF
θ=
P r
.
... (2.40) Maka tekanan atau tegangan tangensial yang terjadi adalah gaya tangensial Fθ dibagi ketebalan dinding..
hF
P r
t
t
θσ
=
=
atau.
2.
hP D
t
σ
=
... (2.41) Dimana: D = diameter pipa = 2.r o I P= P −P =resultan tekanan yang mengelilingi pipaSedangkan, untuk silinder berdinding tebal, maka besar hoop stress diturunkan dari tegangan radial. Tegangan radial diberikan oleh persamaan berikut ini; r F t θ
σ
= ... (2.42)Dimana r adalah selisih antara diameter terluar dan ketebalan dinding, tidak seperti pada gambar 2.10. Untuk silinder berdinding tebal, tegangan radial yang bekerja pada potongan melintang pipa didefinisikan sebagai hoop stress. Maka, persamaan hoop stress adalah;
(
)
.
2.
O I H
P
P OD WT
P r
t
t
σ
=
=
−
−
... (2.43)Maka, tegangan end cap effect adalah tegangan yang disebabkan oleh tegangan fluida dalam pipa pada ujung pipa yang tertutup. Adanya tegangan ini berpengaruh terhadap bending yang terjadi pada pipa. Persamaan end cap effect diberikan oleh;
2 H ep
σ
σ
= ... (2.44)2.3.2 BENDING STRESS
Tegangan tekuk (bending stress) terjadi akibat adanya momen tekuk pada pipa, sehingga perlu diketahui beban total penghasil gaya tekuk pada pipa. Beban ini merupakan kombinasi dari berat pipa dalam air dan gaya hidrodinamik horizontal dengan persamaan berikut;
(
)
2 2 max sub D I q= W + F +F ... (2.45) Maka, tegangan tekuk maksimum yang terjadi adalah; . . 2. B B tcc B M y M D I Iσ
= = ... (2.46) Persamaan momen tekuk statik maksimum (MB) diberikan oleh DNV 1981 sebagai berikut; 2 . eff B q L M C = ... (2.47)Panjang efektif (Leff) akan dijelaskan pada Bab 3, subbab 3.6.5. Sedangkan C adalah
konstanta kondisi batas perletakan, diberikan pada tabel 2.2.
2.3.3 THERMAL STRESS
Thermal stress adalah tegangan yang terjadi akibat adanya ekspansi (pemuaian) yang terjadi pada pipa. Persamaan tegangan pemuaian adalah sebagai berikut;
. .
TE
TT
σ
=
α
Δ
... (2.48) Dimana; E = modulus elastisitas baja αT = perbedaan temperatur antara kondisi instalasi dan operasional ΔT = koefisien ekspansi thermal2.3.4 POISSON STRESS
Poisson stress merupakan tegangan yang terjadi akibat adanya tegangan residual pada saat fabrikasi pipa, sehingga pipa harus kembali ke keadaan semula. Maka, kembalinya pipa ke keadaan semula menyebabkan terjadinya gaya aksial, sehingga menyebabkan kontraksi pada dinding pipa. . p H
σ
=ν σ
... (2.49) 2.3.5 LONGITUDINAL STRESSLongitudinal stress merupakan kombinasi dari bending stress, thermal stress, end cap effect,dan poisson effect. Longitudinal stress ini merupakan tegangan aksial yang bekerja pada penampang pipa. Persamaan longitudinal stress adalah sebagai berikut;
L B ep T p
σ
=σ
+σ
+σ
+σ
... (2.50)
Gambar 2.11 Ilustrasi tegangan longitudinal pada pipa.
2.3.6 EQUIVALENT STRESS
Equivalent stress merupakan resultan seluruh komponen tegangan yang terjadi pada pipa. Persamaan tegangan ekuivalen dirumuskan sebagai tegangan von mises berikut ini;
2 2
.
3.
E H L H L x
σ
=
σ
+
σ
−
σ σ
+
τ
... (2.51) Besaran tegangan geser tangensial
τ
x diabaikan dalam perhitungan tegangan ekuivalen ini karena besarnya tidak dominan dibanding komponen tegangan lainnya. Untuk perhitungan konservatif maka perkalian antar tegangan tangensial dan longitudinal diabaikan.2.4
VORTEX INDUCED VIBRATION (VIV)
Fenomena Vortex Induced Vibration (VIV) adalah fenomena terjadinya vibrasi atau getaran yang terjadi akibat resonansi yang disebabkan oleh terbentuknya wake atau vortex di belakang struktur membelakangi arah aliran. Ketika aliran fluida mengalir melewati pipa, maka akan terbentuk vortex di belakang pipa. Vortex ini disebabkan adanya turbulensi dan ketidak stabilan aliran di belakang pipa. Pembentukan vortex (vortex sheeding) ini menyebabkan perubahan tekanan hidrodinamika secara periodik pada pipa, sehingga mengakibatkan bentang pipa (pipe span) bervibrasi.
Frekuensi vortex shedding yang terjadi tergantung pada diameter pipa dan kecepatan aliran. Mengacu pada DNV 1981, frekuensi vortex ini disebut juga frekuensi Strouhal. Jika frekuensi Strouhal ini memiliki besar yang mendekati atau bahkan menyamai frekuensi natural pipe span, maka akan terjadi resonansi pada pipe span tersebut. Resonansi yang terjadi dapat mengakibatkan kegagalan/collapse pada pipe span, dengan pola keruntuhan kelelehan (yielding) dan tentunya keruntuhan kelelahan (fatigue).
Osilasi akibat resonansi yang terjadi pada pipa terjadi dalam dua arah, yaitu dalam cross‐flow dan in‐line. Osilasi yang lebih harus diperhatikan adalah dalam arah cross‐flow, akan dijelaskan lebih detil pada bab 3. Gambar 2.12 menunjukkan ilustrasi vortex yang terjadi pada area pipe downstream, dan arah osilasi.
Gambar 2.12 Ilustrasi vortex shedding dan arah osilasi yang terjadi pada pipa.
Keruntuhan struktur pipa akibat terjadinya resonansi/osilasi dapat dicegah bila frekuensi vortex memiliki nilai dengan interval yang jauh berbeda dari frekuensi natural pipe span. Pencegahan atau tindakan mitigasi pipe span ini dilakukan setelah pipa digelar dan dilakukan survey akhir. Kegiatan ini dilaksanakan pada tahap span correction.
Besar frekuensi vortex shedding atau frekuensi Strouhal adalah:
(
)
.
C W V tccS U
U
f
D
+
=
... (2.52) Dimana: Vf
= frekuensi vortex shedding Uc+Uw = kecepatan aliran totalS = bilangan Strouhal
Dtcc = diameter pipa
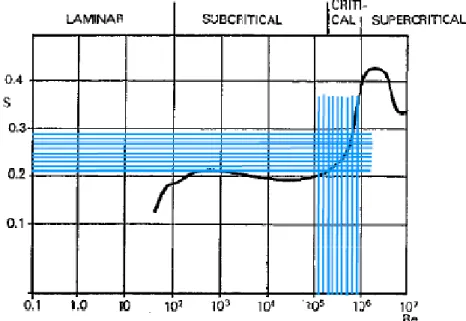
Bilangan Strouhal merupakan bilangan frekuensi non‐dimensional dari vortex shedding dan fungsi dari bilangan Reynolds. Bilangan Reynolds sendiri merupakan rasio dari gaya inersia dan gaya viscous, telah dijelaskan pada sub‐bab sebelumnya. DNV 1981 menganjurkan nilai bilangan Strouhal diambil dari grafik pada gambar 2.13 di bawah ini.
Gambar 2.13 Grafik hubungan bilangan Reynolds dan bilangan Strouhal (DNV 1981 Submarine Pipeline Systems). Sedangkan, besar frekuensi natural bentang bebas pipa bergantung pada kekakuan pipa, panjang bentang , kondisi ujung‐ujung bentang, dan massa efektif dari pipa. Frekuensi natural pipa diberikan oleh A.H Mouselli dengan persamaan berikut ini.
.
2 .
e n s eC
EI
f
L
M
π
=
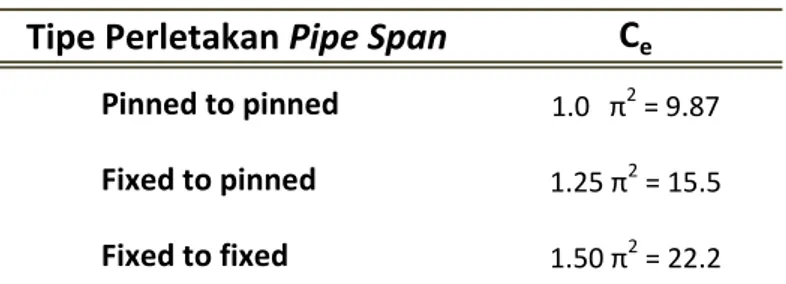
... (2.53)Dimana: fn = frekuensi natural pipa Me=massa efektif pipa Ce = konstanta perletakan ujung bentang EI = kekakuan pipa Untuk konstanta perletakan ujung bentang Ce, besarnya berbeda untuk tiap tipe perletakan. Tabel 2.2 berikut ini menunjukkan besar Ce untuk tiap tipe perletakan.
Tabel 2.2 Konstanta Perletakan Ujung Bentang Pipe Span
Sedangkan, massa efektif adalah penjumlahan total dari unit mass pipa dan coating layer, unit mass content yang diangkut, dan unit mass dari air yang dipindahkan (added mass).
e p c a
M =M +M +M
... (2.54) Dimana:
Me = massa efektif
Mp = unit mass pipa dan coating
Mc = unit mass content pipa
Ma = unit mass buoyancy (added mass)
Maka, dari parameter‐parameter yang telah disebutkan diatas, maka besar frekuensi Strouhal dan frekuensi natural pipe span dapat dihitung. Faktor ini menjadi acuan desain keamanan pipa terhadap fenomena VIV. Desain pipa yang aman terhadap VIV adalah desain yang memiliki nilai frekuensi natural pada allowable pipe span yang jauh dari nilai frekuensi Strouhal atau vortex shedding.
Tipe
Perletakan
Pipe
Span
C
ePinned to pinned 1.0 π2 = 9.87
Fixed to pinned 1.25 π2 = 15.5
Selain itu, terdapat parameter lain yang menentukan tipe osilasi pipe span, yaitu:
9 Reduced velocity VR, parameter untuk penentuan range kecepatan aliran yang dapat
menyebabkan vortex shedding.
[
]
.
.
c w R n nU
U
V
V
f D
f D
+
=
=
, ... (2.55) dimana; V = kecepatan aliran total fn = frekuensi natural pipe spanD = diameter pipa total terluar 9 Koefisien stabilitas Ks , parameter stabilitas yang mengontrol jenis gerakan osilasi. 2 2. . . e S M K D
δ
ρ
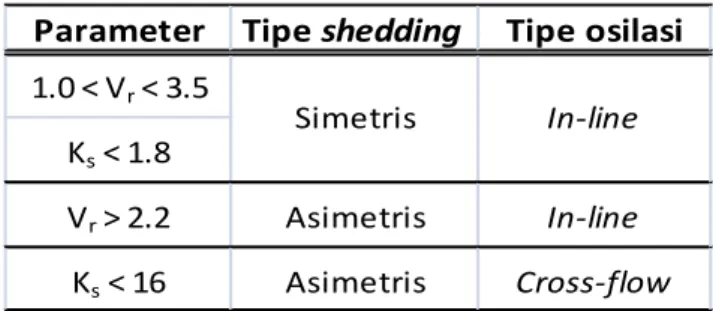
= , ... (2.56 dimana; Me = massa efektif pipa ρ = massa jenis air laut δ = pengurangan redaman struktur secara logaritmik. Dari parameter penentu tipe osilasi diatas, maka tabel 2.3 menjelaskan kriteria osilasinya.Tabel 2.3 Kriteria Tipe Osilasi VIV
Parameter Tipe shedding Tipe osilasi
1.0 < Vr < 3.5
Ks < 1.8
Vr > 2.2 Asimetris In‐line
Ks < 16 Asimetris Cross‐flow
Simetris In‐line
2.5
PROPERTI PIPA BAWAH LAUT
Pada umumnya, material utama pipa bawah laut adalah pipa yang terbuat dari carbon steel, atau logam lainnya. Dalam lingkungan laut yang tidak bersahabat, dimana terdapat arus, gelombang dan sifat kimia air laut yang korosif, maka perlu diberikan perlindungan terhadap pipa tersebut. Perlindungan anti korosi antara lain dengan lapisan High Density Polyethylene (HDPE) dan lapisan beton. Lapisan beton ini juga berfungsi sebagai pemberat untuk menjaga stabilitas pipa di bawah laut. Potongan melintang sebuah pipa bawah laut ditunjukkan gambar 2.14 di bawah ini.
Gambar 2.14 Ilustrasi penampang pipa bawah laut.
Dan penamaan properti pipa sebagai berikut: ID : Diameter dalam pipa baja
OD (Ds) : Diameter luar pipa baja = ID + 2.ts
ts : Ketebalan dinding pipa baja
tcorr : Ketebalan lapisan anti korosi (corrosion coating)
tcc : Ketebalan lapisan beton (concrete coating)
Wst : Berat pipa baja di udara
Wcorr : Berat lapisan anti korosi di udara
Wcc : Berat lapisan beton di udara
Wcont : Berat content (isi pipa) di udara Wbuoy : Berat/gaya apung (buoyancy)
Wsub : Berat pipa di dalam air (terendam) ρs : Massa jenis baja ρcorr : Massa jenis lapisan anti korosi ρcc : Massa jenis lapisan beton ρsw : Massa jenis air laut ρcont : Massa jenis content (isi pipa)
Dalam perhitungan beban yang akan diterima pipa, berat dari pipa itu sendiri juga diperhitungkan sebagai berat pipa terdistribusi merata per satuan panjang. Dalam analisis free span ini, perhitungan berat sendiri pipa dilakukan untuk dua fase, yaitu fase instalasi (pipa kosong) dan fase operasi (pipa dengan gas content). Berikut ini adalah formula perhitungan berat untuk tiap properti pipa. 9 Berat baja di udara (Ws) 2 2
4
s sW
=
π ρ
⎡
⎣
OD
−
ID
⎤
⎦
... (2.57) 9 Berat lapisan anti korosi di udara (Wcorr) 2 2(
2.
)
4
corr corr s corr s
W
=
π ρ
⎡
⎣
D
+
t
−
D
⎤
⎦
... (2.58)
9 Berat lapisan beton di udara (Wcc) 2 2
(
2.
2. )
(
2.
)
4
cc cc s corr cc s corrW
=
π ρ
⎡
⎣
D
+
t
+
t
−
D
+
t
⎤
⎦
... (2.59)9 Berat content pipa di udara (Wcont) 2
.
4
cont contW
=
π ρ
ID
... (2.60) 9 Berat/gaya apung pipa (Wbuoy)[
]
2.
2.
2.
4
buoy sw s corr ccW
=
π ρ
D
+
t
+
t
... (2.61) 9 Berat pipa di dalam air (Wsub)sub s corr cc cont buoy
W =W +W +W +W −W ... (2.62) Telah dijelaskan sebelumnya bahwa lapisan beton berguna untuk menjaga stabilitas pipa di dasar laut. Selain itu, juga berguna sebagai pelindung pipa dari benturan, maupun aktivitas manusia lainnya yang bersifat merusak.
Terdapat regulasi pemerintah yang mengatur keselamatan operasi pipa bawah laut. Berdasarkan SKEP Mentamben no. 300 K/38/M.PE/1997, pipa yang berada pada area shore approach, dengan kedalaman perairan kurang dari ‐14 m LAT harus dikubur pada trench dengan kedalaman minimum 2 m dari TOP (top of pipe) ke permukaan seabed. Hal ini dimaksudkan untuk menghindari kerusakan pipa akibat banyaknya aktivitas maritim yang dilakukan manusia pada perairan dangkal tersebut.
Sebagai pemberat, ketebalan lapisan beton juga harus diperhitungan secara detail dengan melihat kondisi seabed dan gaya lingkungannya dan juga kondisi instalasi. Lapisan beton yang terlalu tebal dapat menyebabkan pekerjaan instalasi menjadi terlalu berat, dan rawan terhadap buckling.
2.6
FENOMENA FATIGUE
Fatigue adalah fenomena kelelahan struktur akibat adanya pembebanan berulang (cyclic loading) yang diterima oleh struktur tersebut. Fenomena ini merupakan hazard bagi suatu struktur lepas pantai maupun pipa bawah laut, karena dapat menyebabkan umur operasi struktur tersebut menurun drastis.
Batas dari fatigue didefinisikan sebagai tegangan (stress) dimana material atau titik joint/sambungan dapat menahan beban yang berulang dalam jumlah siklus tertentu. Nilai dari fatigue limit ini didapat dari kurva S‐N, yang berisi range tegangan dan jumlah siklus pembebanan yang diizinkan. Kekuatan fatigue (fatigue strength) dari suatu struktur merupakan tegangan maksimum yang dapat ditahan oleh struktur tanpa mengalami keruntuhan pada frekuensi pembebanan tertentu.
Mengacu pada kode DNV RP F105, maka kriteria fatigue yang harus dipenuhi oleh sebuah sistem pipa bawah laut pada zona free span adalah sebagai berikut; .Tlife Texposure
η
≥ ... (2.63) Dimana; η = rasio kerusakan fatigue yang diizinkan lifeT
= kapasitas umur desain fatigue exposure T = masa kerja beban yang bekerja terhadap pipa Untuk kondisi tegangan tertentu yang fluktuatif dengan amplitudo tegangan yang bervariasi dalam order acak, besar fatigue damage dapat dihitung dari metoda Palmgreen‐Miner sebagai berikut: 1 s i fat fat i in
D
N
α
==
∑
≤
... (2.64) Dimana;Dfat = fatigue damage terakumulasi
ni = total jumlah siklus tegangan dalam range tegangan Si
N = jumlah total siklus untuk kegagalan pipa dalam range tegangan Si (kurva S‐N)
fat
α
= rasio kerusakan fatigue yang diizinkan (DNV OS F101)1/ 3
1/ 5
1/10
safety factor "low"
safety factor "medium"
safety factor "high"
fatα
⎧
⎪
= ⎨
⎪
⎩
Dan, jumlah siklus yang menyebabkan keruntuhan fatigue pada range tegangan Si
didefinisikan oleh kurva S‐N oleh persamaan;
logNi =loga m− .logSi ... (2.65) Dimana;
i
N
= jumlah siklus yang menyebabkan keruntuhan fatigue pada range tegangan Sii
S
= nilai range tegangan ke‐I, didapat dari perhitungan response modela
= konstanta kekuatan karakteristik fatigue, merupakan perpotongan kurva S‐N dengan sumbu Nim = slope negatif inverse kurva S‐N
Kurva S‐N dibuat berdasarkan pengetesan pada suatu spesimen yang dilakukan oleh DNV. Karakteristik fatigue strength yang ditunjukkan pada kurva S‐N (gambar 2.15) adalah range tegangan (stress range) versus jumlah siklus hingga kegagalan pipa (number of cycles to failure), diambil berdasarkan 95% dari reliability limit dari yield strength. Untuk perhitungan sisa umur operasi struktur akibat fatigue damage dihitung dengan persamaan:
1
Umur sisa Fatigue
fatD
=
... (2.66)
Gambar 2.16 Kurva S-N untuk struktur di laut dengan perlindungan katodik (DNV RP C203).
Kurva yang digunakan untuk analisis fatigue pipa bawah laut adalah kurva C1. Kurva C1 ini berlaku untuk pipa bawah laut dengan tipe pengelasan hanya dari satu sisi saja dan tingkat kualitas pengawasan yang cukup, serta dilakukannya pembersihan untuk menghilangkan overfill pada pengelasan dengan pigging. Parameter kurva C1 adalah:
• m1 = 3.0 dan a1 = 12.049 untuk N < 107 cycles.
• m2 = 5.0 dan a2 = 16.081 untuk N > 107 cycles.
Beberapa pengujian pada data‐data keruntuhan akibat fatigue mengindikasikan beberapa faktor yang mempengaruhi kekuatan struktur dalam menahan fatigue (fatigue strength). Faktor‐ faktor tersebut antara lain :
a) Faktor material :
9 Jenis material dan finishing permukaan
9 Tegangan sisa (residual stress)
b) Faktor desain :
9 Rate pembebanan
9 Tegangan maksimum
9 SCF (perbandingan tegangan ekstrim dan tegangan nominal) c) Faktor fabrikasi :
9 Teknik fabrikasi (semakin modern dan bagus kualitas pengelasan dan pelapisan (coating), maka semakin sedikit diskontinuitas bahan)
9 Pengerjaan di shop (ada atau tidaknya treatment khusus yang bisa mempengaruhi sifat bahan)
Perhitungan kerusakan fatigue dengan standar DNV RP F105 merupakan perhitungan fatigue akibat fenomena VIV akibat arus dan gelombang. Perhitungan fatigue damage dilakukan akibat pengaruh gelombang yang mempengaruhi aliran yang melewati dan bekerja pada struktur pipa. Penentuan fatigue damage akibat gelombang memiliki tahapan seperti dijelaskan gambar 2.16 berikut ini.