SENATEK 2015 | Malang, 17 Januari 2015 469
Pemasangan LC Filter Pada SCR
(Silicon Controlled
Rectifier)
Sebagai Pengendali Motor DC
Bambang Prio Hartono, Choirul Saleh, Taufik Hidayat
Program Studi Teknik Elektro, ITN Malang e-mail: [email protected]
ABSTRAK
Filter merupakan suatu rangkaian untuk melewatkan sinyal-sinyal yang diperlukan dan menahan sinyal-sinyal yang tidak dikehendaki serta untuk memperkecil pengaruh noise dan interferensi pada sinyal yang dikehendaki. Sekarang ini converter elektronika daya banyak digunakan dikalangan luas, salah satunya adalah SCR (Silicon Controlled Rectifier).
Permasalahannya adalah setiap perubahan sudut pemicuan SCR seringkali dapat menyebabkan pengaruh yang tidak diinginkan antara lain peralatan menjadi panas dan life time peralatan menjadi berkurang. Pemasangan LC Filter adalah suatu solusi untuk permasalahan tersebut.
Metode melalui pengaturan tegangan dengan mereduksi amplitudo frekuensi tegangan dan arus serta mengetahui pengaruhnya terhadap unjuk kerja Motor DC itu sendiri.
Dengan pemasangan LC filter pada SCR sebagai pengendali motor dc, step tegangan pada setiap sudut pemicuan lebih baik (Smooth) dimana rata-rata penurunan tegangan per-stepnya adalah: 0.53 Volt dc, dibandingkan tanpa pemasangan LC Filter pada SCR sebagai pengendali motor dc dengan kondisi Torsi beban nol maupun Torsi beban disetting pada 0.5 N.m rata – rata penurunan tegangan per-stepnya adalah : 3.2 Volt dc.
Kata Kunci: Filter,SCR (Silicon Controlled Rectifier), Motor DC, LC Filter
ABSTRACT
Filter is a circuit to pass the necessary signals and hold signals are not desired as well as to minimize the effects of noise and interference on the desired signal. Now this converter power electronics widely used among many, one of which is a SCR (Silicon Controlled Rectifier). The problem is that any change in angle of the SCR triggers can often cause unwanted effects, among others, the equipment becomes hot and the life time of the equipment to be reduced. Installation LC filter is a solution to these problems.
Method through voltage regulation by reducing the amplitude of the voltage and current frequency and determine its influence on the performance of the DC motor itself.
With the installation of LC filters on SCR as dc motor controllers, voltage step at each corner better triggers (Smooth) where the average per-stepnya voltage drop is: 0:53 Volt dc, compared with no installation LC filter on the SCR as a dc motor controller with conditions zero load torque and load torque of 0.5 Nm be set on average - average voltage drop per-stepnya are: 3.2 Volts dc.
SENATEK 2015 | Malang, 17 Januari 2015 470 Pendahuluan
Motor dc digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas. Keuntungan utama Motor dc adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Penggunaan motor arus searah sudah sangat dikenal secara luas. Keuntungan-keuntungan yang menonjol akan penggunaan motor-motor arus searah tersebut timbul dengan penunjukan karakteristik operasinya. Motor dc secara luas dipergunakan dalam berbagai macam penerapan yang memerlukan putaran yang dapat diatur dan beberapa penerapannya digunakan pada industri kecil, industri kertas dan lain - lain.[1]
Sistem kendali memegang peranan yang sangat penting dalam perkembangan ilmu pengetahuan dan teknologi. Sistem proses pengontrolan secara luas digunakan pada industri yang menggunakan mesin yang bekerja bersama-sama untuk melakukan suatu operasi tertentu. Sekarang ini converter elektronika daya banyak digunakan dikalangan luas, salah satunya adalah SCR (Silicon Controlled Rectifier)[4]. Pengendalian motor dc sangat diperlukan apabila
motor tersebut akan digunakan pada kecepatan yang diinginkan[1]. Dalam setiap perubahan
sudut pemicuan SCR seringkali dapat menyebabkan pengaruh yang tidak di inginkan antara lain peralatan menjadi panas dan, life time peralatan menjadi berkurang[4]. Filter merupakan
suatu rangkaian yang berfungsi untuk melewatkan sinyal-sinyal yang diperlukan dan menahan sinyal-sinyal yang tidak dikehendaki serta untuk memperkecil pengaruh noise dan interferensi pada sinyal yang dikehendaki. Secara sederhana pemfilteran adalah sebuah proses pemilihan atau penekanan komponen-komponen frekuensi tertentu dari sebuah sinyal[9]. Ada beberepa
jenis filter yang ditawarkan yaitu low-pass filter, band pass filter, high-pass filter dan bandstop filter[10]. Rangkaian filter dapat bersifat pasif maupun aktif menggunakan operasional amplifier
(op-amp) dengan komponen resistor dan kapasitor. Sedangkan filter pasif yaitu filter yang hanya tersusun dari resistor dan kapasitor, atau resistor dan induktor maupun kombinasi ketiga komponen tersebut. Filter aktif mempunyai beberapa kelebihan dibandingkan dengan filter pasif seperti ukurannya yang lebih kecil, ringan dan murah serta memberikan banyak keleluasaan dalam hal perancangannya. Adapun kekurangan filter aktif ini adalah adanya kebutuhan akan catu daya dan kepekaan terhadap perubahan keadaan sekitarnya seperti perubahan suhu[10].
Oleh karena itu dengan adanya analisis pemasangan LC filter pada SCR (silicon controlled rectifier) sebagai pengendali motor dc melalui pengaturan tegangan, kita dapat mereduksi amplitudo frekuensi tegangan dan arus serta mengetahui pengaruhnya terhadap unjuk kerja motor dc itu sendiri. Simulasi komputer sering dipilih untuk mempelajari kinerja peralihan dan kendali atau untuk mencoba rancangan-rancangan konseptual. Simulasi dapat sangat membantu pemahaman terhadap tingkah laku dinamik dan interaksinya yang sering kali tidak nampak dalam teori yang dibaca untuk dilanjutkan pada sistem yang nyata dalam bentuk percobaan.
Pengaturan kecepatan Motor DC
Motor dc merupakan mesin penggerak yang banyak digunakan karena memiliki kelebihan pada pengaturan kecepatannya. Pada umumnya pengaturan kecepatan motor dc penguatan terpisah dan motor dc penguatan sendiri hampir sama. Pengaturan kecepatan pada motor dc penguatan terpisah lebih luas dibandingkan pengaturan kecepatan pada motor dc penguatan sendiri dikarenakan motor dc penguatan terpisah dicatu oleh dua sumber, untuk selanjutnya di sini hanya akan ditinjau pengaturan kecepatan motor dc penguatan terpisah. Kecepatan motor dc penguatan terpisah dapat diatur dengan menggunakan tiga metode yaitu [7]:
Pengaturan fluksi/medan, Pengaturan resistansi jangkar, Pengaturan tegangan jangkar
Atas dasar inilah penulis tertarik untuk melakukan penelitian pengaturan kecepatan motor arus searah penguatan terpisah dengan pengaturan jangkar.
SENATEK 2015 | Malang, 17 Januari 2015 471
Pengaturan Tegangan Jangkar
Pada metode ini resistansi jangkar dan sisi medannya dijaga konstan sehingga pengaturan hanya dilakukan pada tegangan jangkarnya seperti pada gambar 1. Motor DC Penguat Terpisah Motor DC penguat terpisah merupakan salah satu dari jenis motor DC yang dapat menambah kemampuan daya dan kecepatan karena memiliki fluks medan (Ф) yang dihasilkan oleh kumparan medan, yang terletak secara terpisah dan mempunyai sumber
Gambar 1. [8] Diagram Skematik Jangkar-Magnet Terkontrol Motor DC
Dimana :
a
R
= Tahanan Kumparan Jangkar (Ohm)a
L
= Induktansi Kumparan Jangkar (Henry)a
E
= Tegangan yang dikenakan pada Jangkar (Volt)b
e
= Gaya gerak listrik (ggl) lawan Motor (Volt)a
I
= Arus kumparan Jangkar (Ampere)f
i
= Arus Medan (Ampere)
= Perpindahan sudut dari poros Motor (radian)T
= Torsi yang diberikan oleh Motor (radian)J
= Momen Inersia ekivalen dari Motor dan beban pada poros (Kg.m2)b
= koefisien gesek (Nm/rad/det)Rangkaian L dan C Filter[10]
Rangkaian LC filter adalah rangkaian yang berfungsi untuk mengurangi faktor ripple yang terjadi pada suatu rangkaian penyearah. Tujuan dari pemasangan filter LC adalah untuk mereduksi amplitudo frekuensi tertentu dari sebuah tegangan dan arus, dalam hal ini faktor
ripple yang terjadi pada SCR (Silicon Controlled Rectifier) sebagai pengendali motor dc. Dengan penambahan filter LC pada SCR (Silicon Controlled Rectifier) sebagai pengendali Motor DC, maka dapat mereduksi amplitudo frekuensi tertentu dari sebuah tegangan dan arus.
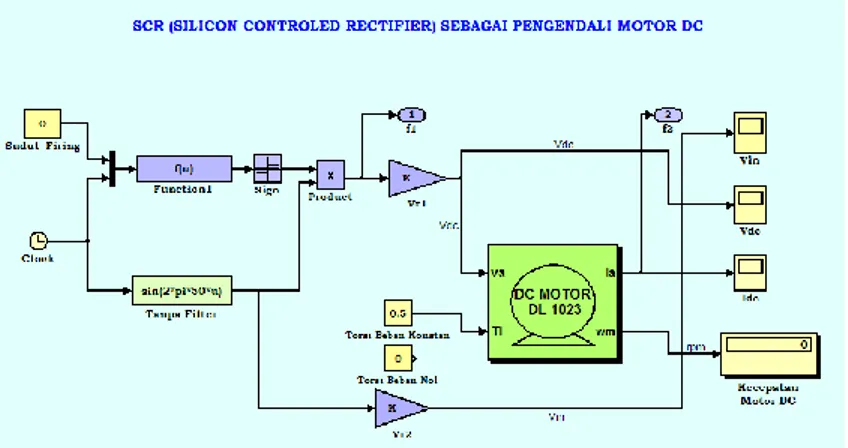
Dalam penelitian ini jenis filter yang digunakan adalah jenis filter aktif. Secara umum Pemasangan LC filter pada SCR (Silicon Controlled Rectifier) sebagai pengendali motor dc dapat dilihat pada gambar 2.
SENATEK 2015 | Malang, 17 Januari 2015 472
Spesifikasi Motor DC
Adapun Parameter motor dc dan spesifikasi dari motor dc yang digunakan dalam penelitian ini adalah sebagai berikut : Data motor dc penguatan terpisah yang dipergunakan berdasarkan
name plate adalah sebagai berikut:
Jenis Motor : Motor DC Shunt
Daya : 1,1 kW
Tegangan Nominal Jangkar : 220 V
Arus Nominal Jangkar : 6,5 A
Tegangn Nominal Medan : 190 V
Arus Nominal Medan : 0,38 A
Putaran : 3000 rpm
Metode Penelitian
Pemodelan SCR (Silicon controlled rectifier) Algoritma pemrograman
Tanpa pemasangan LC filter
Pengujian parameter dan rangkaian kontrol motor dc.
Membentuk blok simulink motor dc dan sub. system rangkaian kontrolnya berdasarkan transfer function.
Memasukan parameter motor dan setting sudut penyalaan (firing) dari rangkaian kontrolnya. Menjalankan simulasi motor dc dengan parameter motor dan setting sudut penyalaan (firing)
dari rangkaian kontrol yang sudah dimasukan. Menampilkan hasil simulasi.
Pengecekan dengan eksperimen.
Gambar 3. Model pengontrolan SCR (Silicon Controlled Rectifier) sebagai pengendali motor DC
Dengan pemasangan LC filter
Pengujian parameter dan rangkaian kontrol motor dc dan LC filter.
Membentuk blok simulink motor dc, LC filter dan sub. system rangkaian kontrolnya berdasarkan
transfer function.
Memasukan parameter motor dc, LC filter dan setting sudut penyalaan (firing) dari rangkaian kontrolnya.
Menjalankan simulasi motor dc dengan parameter motor dan setting sudut penyalaan (firing)
dari rangkaian kontrol yang sudah dimasukan. Menampilkan hasil simulasi.
Pengecekan dengan eksperimen.
Secara umum pengendalian motor dc menggunakan SCR dapat dilihat pada gambar 6. Khusus pemodelan SCR untuk mengendalikan motor dc dilakukan dengan blok transfer function
SENATEK 2015 | Malang, 17 Januari 2015 473 yang mana function 1 merupakan fungsi inputan dalam pemicuan sudut SCR
(
0)
dan function 2 merupakan fungsi output dalam membentuk gelombang hasil pemicuan sudut SCR)
(
0 didapatkan dari [4]:
V
t
d
t
V
t
V
m m dccos
2
2
)
(
.
sin
2
2
2)
cos
1
(
2
V
m 2 / 1 2 2 2 / 1 2 2)
(
).
2
cos
1
(
2
)
(
.
sin
2
2
V
t
d
t
V
t
d
t
V
rms m m
2
)
2
sin(
1
2
m rmsV
V
dan diambil
V
(
t
)
V
m.
sin(
t
)
yang merupakan tegangan pada puncak gelombang penuh, yang diubah kedalam transfer function menjadi sin
2fPemodelan LC filter
Khusus pemodelan LC Filter Pada SCR untuk mengendalikan Motor DC dilakukan dengan blok transfer function yang mana function 1 merupakan fungsi inputan dalam pemicuan sudut SCR
(
0)
dan function 2 merupakan fungsi output dalam membentuk gelombang hasil pemicuan sudut SCR(
0)
serta untuk pemodelan LC Filter Function 2 diganti dengan blok transfer function LC Filter didapatkan dari :
V td t V t V m m dc cos 2 2 ) ( . sin 2 2 2)
cos
1
(
2
V
m 2 / 1 2 2 2 / 1 2 2 ) ( ). 2 cos 1 ( 2 ) ( . sin 2 2 V td t V t d t Vrms m m
2
)
2
sin(
1
2
m rmsV
V
dan diambil
V
(
t
)
V
m.
sin(
t
)
yang merupakan tegangan pada puncak gelombang penuh, yang diubah kedalam transfer function menjadi sin (2
f
)Hasil dan Pembahasan
Motor dc merupakan objek yang akan dikontrol atau yang dikendalikan yang langsung disambungkan ke terminal output dari SCR dengan pemasangan L dan C filter serta tanpa pemasangan L dan C filter (hanya menggunakan SCR). Lihat gambar 1
Hasil simulasi
Tanpa pemasangan LC filter, torsi beban nol dengan Vac =190 V
Hasil simulasi Vac pada sudut pemicuan SCR (
0) = 0
0
dengan kondisi torsi beban nol dimana, Vac = 190 Volt.SENATEK 2015 | Malang, 17 Januari 2015 474
Gambar 4. Hasil Simulasi Vac pada Sudut Pemicuan SCR (
0) =0
0Dengan Kondisi Torsi Beban Nol Tanpa Pemasangan LC Filter
Gambar 4 adalah bentuk gelombang tegangan input AC, dimana besar tegangan input AC adalah 190 Volt. Pada t = 0 sampai t = 0.05 sec. Serta terlihat juga bahwa 1 periode (T) = 0,02 second. Sehingga sesuai dengan persamaan
T
f
1
maka frekuensi = 50 HZ.Untuk Sudut Pemicuan SCR (
0) = 0
30
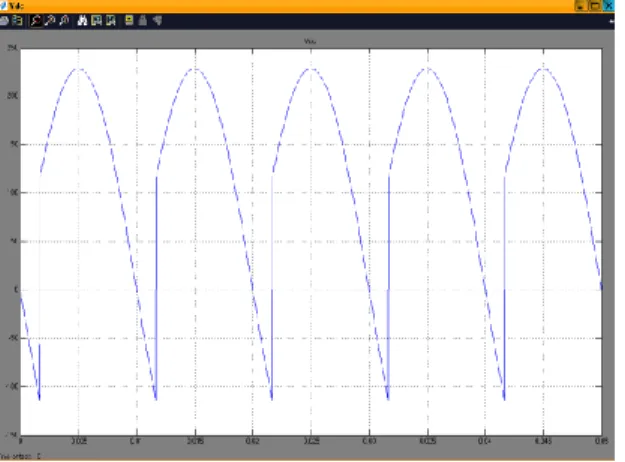
Hasil simulasi Vdc pada sudut pemicuan SCR (
0) = 030
dengan kondisi torsi beban nol dimana, Vac = 190 VoltGambar 5. Hasil Simulasi Vdc Pada Sudut Pemicuan SCR (
0 ) = 030
Pada Kondisi Torsi Beban Nol Tanpa Pemasangan LC FilterPada gambar 5 adalah bentuk gelombang tegangan dc, dari gambar hasil simulasi terlihat bahwa pada bentuk gelombang tegangan output dc terjadi pemotongan gelombang sebesar 0
30
pada t = 0 sampai t = 0.001 sec. Sebesar 115 Volt disebabkan karena sudut pemicuan SCR disetting sebesar 030
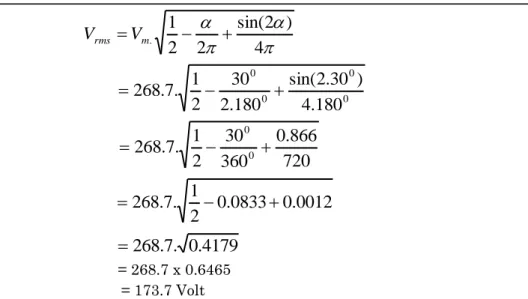
Besarnya rata-rata tegangan dc (Vrms) untuk sudut pemicuan SCR (
0) = 030
dapat di hitung dengan persamaan : MakaV
rms untuk sudut pemicuan SCR (
0) = 0
30
adalah: mV
=2
.
Vac
mV
=2
.
190
= 268.7 Volt
4
)
2
sin(
2
2
1
.
m rmsV
V
SENATEK 2015 | Malang, 17 Januari 2015 475
4
)
2
sin(
2
2
1
.
m rmsV
V
0 0 0 0180
.
4
)
30
.
2
sin(
180
.
2
30
2
1
.
7
.
268
720
866
.
0
360
30
2
1
.
7
.
268
0 0
0012
.
0
0833
.
0
2
1
.
7
.
268
4179
.
0
.
7
.
268
= 268.7 x 0.6465 = 173.7 VoltUntuk Kecepatan Motor dc pada semua sudut pemicuan, baik pada kondisi torsi beban nol maupun torsi beban yang disetting pada 0.5 N.m tanpa pemasangan LC Filter maupun dengan pemasangan LC Filter ditampilkan dalam bentuk block display pada gambar block simulink hasil simulasi, dan secara lengkap dapat dilihat pada tabel 1 dan tabel 2.
Hasil simulasi untuk kondisi torsi beban disetting pada 0,5 Nm dan Vac =190 V dengam pemasangan LC filter
Untuk Sudut Pemicuan SCR (
0) = 0
0
Karena hasil simulasi kondisi torsi beban disetting pada 0.5 Nm hanya sebagai pembanding (khusus simulasi) maka untuk sudut pemicuan SCR (
0) = 030
, (
0) =45
0dan (
0) =60
0 hasil simulasi Vdc, Idc, dan kecepatan motor dc dengan pemasangan LC filter dapat dilihat selengkapnya pada Tabel 3.Perbandingan hasil simulasi dan eksperimen Tanpa pemasangan LC filter
Tabel 3. Data Hasil Perbandingan Simulasi Dan Eksperimen SCR Sebagai Pengendali Motor Dc Tanpa Pemasangan LC Filter
SUDUT FIRING (
0) VDC ( VOLT ) IDC ( AMPERE ) N ( RPM)Sim / Eks Sim Eks Sim Eks Sim Eks
00 230 227 1.1 1.08 3258 3250
300 173.7 170 0.85 0.83 3118 3110
450 164.9 161 0.7 0.68 2956 2952
600 155.4 153 0.52 0.50 2752 2749
Dengan pemasangan LC filter
Tabel 4. Data hasil perbandingan simulasi dan eksperimen SCR sebagai pengendali motor dc dengan pemasangan LC filter
SUDUT FIRING
(
0)VDC
( VOLT ) ( AMPERE ) IDC ( RPM) N
Sim / Eks Sim Eks Sim Eks Sim Eks
00 190 188 0.51 0.49 3580 3578
300 173.7 170 0.42 0.41 3446 3441
450 164.9 161 0.34 0.33 3292 3290
SENATEK 2015 | Malang, 17 Januari 2015 476
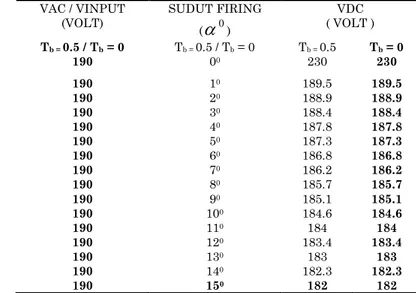
Tabel 5. Data hasil percobaan simulasi penurunan tegangan per-step pada SCR sebagai pengendali motor dc dengan kondisi torsi beban nol Maupun torsi beban disetting pada 0.5 N.m dengan pemasangan L dan C filter
VAC / VINPUT (VOLT) SUDUT FIRING (
0) VDC ( VOLT ) Tb = 0.5 / Tb = 0 Tb = 0.5 / Tb = 0 Tb = 0.5 Tb = 0 190 00 190 190 190 10 189.5 189.5 190 20 188.9 188.9 190 30 188.4 188.4 190 40 187.8 187.8 190 50 187.3 187.3 190 60 186.8 186.8 190 70 186.2 186.2 190 80 185.7 185.7 190 90 185.1 185.1 190 100 184.6 184.6 190 110 184 184 190 120 183.4 183.4 190 130 183 183 190 140 182.3 182.3 190 150 182 182Dari tabel hasil percobaan simulasi Penurunan Tegangan Per-Step pada SCR sebagai Pengendali Motor DC dengan Kondisi Torsi Beban nol Maupun Torsi beban disetting pada 0.5 N.m Dengan Pemasangan L dan C Filter nilai penurunan tegangan dc rata-rata per-step berdasarkan besarnya sudut pemicuan SCR adalah :
15
182
190
= 0.53 Volt.dc
Tabel 6. Data hasil percobaan simulasi penurunan tegangan per-step pada SCR sebagai pengendali motor dc dengan kondisi torsi beban nol Maupun torsi beban disetting pada 0.5 N.m tanpa pemasangan L dan C filter
VAC / VINPUT
(VOLT) SUDUT FIRING(
0) VDC ( VOLT ) Tb = 0.5 / Tb = 0 Tb = 0.5 / Tb = 0 Tb = 0.5 Tb = 0 190 00 230 230 190 10 189.5 189.5 190 20 188.9 188.9 190 30 188.4 188.4 190 40 187.8 187.8 190 50 187.3 187.3 190 60 186.8 186.8 190 70 186.2 186.2 190 80 185.7 185.7 190 90 185.1 185.1 190 100 184.6 184.6 190 110 184 184 190 120 183.4 183.4 190 130 183 183 190 140 182.3 182.3 190 150 182 182
Dari tabel 6. hasil percobaan simulasi Penurunan Tegangan Per-Step pada SCR sebagai Pengendali Motor DC dengan Kondisi Torsi Beban nol Maupun Torsi beban disetting pada 0.5 N.m Tanpa Pemasangan L dan C Filter nilai penurunan tegangan dc rata-rata per-step berdasarkan besarnya sudut pemicuan SCR adalah :
15
182
230
SENATEK 2015 | Malang, 17 Januari 2015 477 Kesimpulan
Besarnya nilai error simulasi : Tanpa pemasangan LC filter : Nilai rata – rata error simulasi pada tegangan dc adalah 1.5 %, Nilai rata – rata error simulasi pada arus dc adalah 2.7 %, Nilai rata – rata error simulasi pada kecepatan motor dc adalah 0.15 %; Dengan pemasangan LC filter : Nilai rata – rata error simulasi pada tegangan dc adalah 1.8 %, Nilai rata – rata error simulasi pada arus dc adalah 3.2 %, Nilai rata – rata error simulasi pada kecepatan motor dc adalah 0.1 % ; Tanpa pemasangan LC filter : Untuk kondisi torsi beban nol : Pada simulasi : semakin besar sudut pemicuan pada SCR, tegangan dc semakin kecil (230 – 155.4 V), arus cenderung mengalami penurunan walaupun relatif kecil (1.1 A – 0.52 A), dan kecepatan semakin kecil (3258 – 2752 rpm), Pada eksperimen : semakin besar sudut pemicuan pada SCR, tegangan dc semakin kecil (227 – 153 V), arus cenderung mengalami penurunan walaupun relatif kecil (1.08 A – 0.50 A), dan kecepatan semakin kecil (3250 – 2749 rpm), Untuk kondisi torsi beban yang disetting pada 0.5 N.m. Khusus pada simulasi Semakin besar sudut pemicuan pada SCR, tegangan dc semakin kecil (230 – 155.4 V), arus cenderung mengalami penurunan walaupun relatif kecil (1.34 A – 0.78 A), dan kecepatan semakin kecil (3123 – 2616 rpm); Dengan pemasangan LC filter pada SCR sebagai pengendali motor dc, step tegangan pada setiap sudut pemicuan lebih baik (Smooth) dimana rata – rata penurunan tegangan per-stepnya adalah : 0.53 Volt dc, dibandingkan tanpa pemasangan LC Filter pada SCR sebagai pengendali motor dc dengan kondisi Torsi beban nol maupun Torsi beban disetting pada 0.5 N.m rata – rata penurunan tegangan per-stepnya adalah : 3.2 Volt dc.
Daftar Pustaka
1 A. E. Fitzgerald, Charles Kingsley,Jr., Stephen D. Umans,” Electric Machinery ”,McGraw-Hil International. fourth edition, 2002.
2 Akagi, H. Modern Active Filters And Tradisional Filters. Japan: Departement of electrical and electronic engineering, Tokyo Institute of technology. 2006.
3 Burak Ozpineci Leon M. Tobert, Simulink Implementation of Induction Machine Model – Amodular Approach, IEEE Transacton on Power Electronics, 2003, 728-734
4 Dubey.Gopal K.,”Power Semiconduktor Controlled Driver”,Prentice Hall, Englewood Cliffs, New Jersey,1989
5 Merazy, Mostafa. Ahmed, Adel A. and Abdel, Fared N. P-q Theory based Shunt Active Power Conditioner for Mitigation of Power Quality Problems. Egypt: Electric Engineering Department, Assiut University, 2011.
6 Moran, L. Pastorini, I. Dixon, J and Wallace R. Series Active Power Filter Compensates Current Harmonics And Voltage Unbalance Simultaneously. IEE Proc-gener. Trans.distribution, 2000.
7 R. Krishan. Electric Motor Drives Modeling, Analysis and Control. Pretince hall International Inc, 1998.
8 Stephen J. Chapman. Electrical Machinery Fundamentals, McGraw-Hill International Editons, 1985.
9 Syed, Moinuddin K. Ram, BV. Sanker. Instantenous Power Theory Based Active Power Filter: A Matlab / Simulink Approach. India, 2005.
10 Victor R. Stefanovic and Peter Bauer ”LC Filter Effect SCR in Trends Motor Drive Applications”, Budapest University of Technology and Economics.
![Gambar 2. [6] Rangkaian LC Filter pada SCR (Silicon Controlled Rectifier) sebagai Pengendali Motor DC](https://thumb-ap.123doks.com/thumbv2/123dok/2519321.2226289/3.893.303.629.977.1136/gambar-rangkaian-filter-silicon-controlled-rectifier-sebagai-pengendali.webp)