Fakultas Ilmu Komputer
Universitas Brawijaya
3811
Sistem Temu Kembali Citra Lubang Jalan Aspal Berdasarkan Tingkat
Kerusakan Menggunakan Ekstraksi Fitur Gray Level Co-occurrence Matrix
Anggita Mahardika1, Yuita Arum Sari2, Candra Dewi3
Program Studi Teknik Informatika, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Salah satu faktor lamanya proses perbaikan jalan yaitu disebabkan oleh proses pencatatan kondisi kerusakan jalan yang masih dilakukan secara manual oleh tenaga kerja manusia sepenuhnya. Seiring berkembangnya teknologi, banyak penelitian terkait sistem deteksi kerusakan jalan menggunakan pengolahan citra digital. Tujuan penelitian ini yaitu untuk membangun sistem temu kembali citra lubang jalan aspal berdasarkan tingkat kerusakan. Proses diawali dengan melakukan pre-procesing
untuk mendapatkan area lubang jalan tersegmentasi. Selanjutnya memanfaatkan ekstraksi fitur tekstur
Gray Level Co-occurrence Matrix (GLCM). Fitur yang digunakan dalam penelitian ini yaitu sebanyak 52 fitur yang berasal dari 13 fitur dengan sudut 0o, 45o, 90o dan 135o. Dari 52 fitur tersebut dilakukan
seleksi fitur menggunakan metode Wrapper dan CFS (Correlation Based Feature Selection). Berdasarkan hasil dari pengujian yang telah dilakukan didapatkan citra lubang jalan sebanyak 117 yang berhasil tersegmentasi dengan tepat pada diameter 101x101, 𝜎𝑠= 75 dan 𝜎𝑟=75. Penggunaan metode seleksi fitur Wrapper memberikan hasil rata-rata akurasi dan MAP (Mean Average Precision) yang lebih tinggi dibandingkan menggunakan metode seleksi fitur CFS maupun tidak menggunakan seleksi fitur. Akurasi dan MAP yang dihasilkan dari metode Wrapper dengan d=1 masing-masingnya yaitu sebesar 55,61% dan 0,710.
Kata kunci: sistem temu kembali citra, gray level co-occurrence matrix, bilateral filtering, deteksi tepi sobel, otsu, manhattan distance, wrapper, CFS, lubang jalan
Abstract
One factors of the road repair process that takes a long time caused by the process of recording the condition of road damage that is still done manually by human labor. Along with the development of technology, many research related to road damage detection system using digital image processing. The purpose of this research is to build a retrieval system of asphalt pavement image based on damage level. The process begins with pre-processing to get a segmented hole area. Furthermore, utilizing feature extraction of Gray Level Co-occurrence Matrix (GLCM) texture. Features used in this research are as many as 52 features derived from 13 features with angles 0o, 45o, 90o and 135o. Of the 52 features performed feature selection using Wrapper and CFS (Correlation Based Feature Selection) methods. Based on the results of the tests that have been done we get the image of 117 holes that successfully segmented successfully on the diameter of 101x101, 𝜎𝑠= 75 and 𝜎𝑟=75. Use of the Wrapper feature selection method gives higher average accuracy and MAP (Mean Average Precision) results than using the CFS feature selection method or not using feature selection. Accuracy and MAP resulting from Wrapper method with d = 1 respectively that is equal to 55.61% and 0.710.
Keywords: Image Retrieval, gray level co-occurrence matrix, bilateral filtering, sobel edge detection, otsu,
manhattan distance, pothole
1. PENDAHULUAN
Jalan merupakan sarana transportasi darat yang berperan penting dan paling sering digunakan untuk segala aktivitas masyarakat
guna memenuhi kebutuhan mobilitas masyarakat seperti pendidikan, kerja atau bisnis, wisata dan lain-lain.
nasional Jawa Timur tercatat sudah melebihi 40% dari total panjang jalan nasional di Jawa Timur. Hasil yang diberikan belum termasuk ruas jalan pada daerah-daerah (Biro Komunikasi Publik Kementrian PUPR, 2017). Kerusakan perkerasan permukaan jalan terutama berupa lubang sering kali mengganggu transportasi darat, bahkan tidak sedikit pula yang mengalami kecelakaan akibat adanya lubang jalan. Salah satu solusi untuk mengurangi peningkatan kerusakan jalan adalah dengan adanya inspeksi kondisi jalan yang rutin untuk mengumpulkan informasi terkait kondisi jalan yang buruk (Punjabi et al., 2014).
Dinas Pekerjaan Umum (DPU)
mengemukakan, salah satu faktor lamanya proses perbaikan jalan yaitu disebabkan oleh proses pencatatan kondisi kerusakan jalan yang masih dilakukan secara manual. Proses pendekteksian dan pencatatan secara manual oleh tenaga kerja manusia sepenuhnya bisa memakan waktu dua minggu untuk jalan sepanjang 1 km, belum lagi tingkat keakuratan yang rendah (Idestio et al., 2013).
Beberapa tahun terakhir ini banyak peneliti dari berbagai Negara yang telah mengangkat topik mengenai kerusakan jalan dengan metode pengolahan citra. Salah satu penelitian terkait pendeteksian lubang jalan yaitu penelitian oleh Koch & Brilakis (2011). Dengan penerapan ekstraksi fitur tekstur menggunakan pendekatan statistik berupa standar deviasi dari intensitas keabuan dihasilkan akurasi sebesar 86%. Ia mengungkapkan bahwa lubang jalan memiliki tiga ciri yaitu bentuk lubang jalan cenderung elips sebagai akibat dari distorsi perspektif, secara visual lubang jalan memiliki ciri nampak lebih gelap jika dibandingkan dengan area sekitarnya dan teksturnya cenderung lebih kasar dibandingkan tekstur jalan di sekeliling lubang. Berdasarkan ciri-ciri tersebut, maka pada penelitian ini dilakukan segmentasi untuk memisahkan area lubang jalan dengan area sekitarnya, serta penerapan eksraksi fitur tekstur untuk mendapatkan nilai tekstur dari citra jalan berlubang. Ekstraksi fitur tekstur yang digunakan yaitu Gray Level Co-occurrence Matrix (GLCM). Ekstraksi fitur GLCM sudah banyak digunakan oleh peneliti untuk mendapatkan nilai tekstur dari citra. Penelitian terkait ekstraksi fitur GLCM diantaranya yaitu penelitian oleh Wen & Guyer (2012) mengenai identifikasi serangga kebun buah berbasis citra menggunakan global feature extraction yang di
dalamnya memuat ciri tekstur GLCM, akurasi dari penelitian tersebut bernilai 85.3%.
Dalam penelitian ini, setelah nilai tekstur lubang jalan didapatkan, selanjutnya dilakukan perhitungan kemiripan antara citra query
dengan citra pada basis data. Perhitungan kemiripan dilakukan menggunakan metode
manhattan distance. Metode manhattan distance digunakan untuk menemukan citra yang mirip sebagai representasi dari sistem temu kembali citra. Hal ini didasarkan pada yang dilakukan oleh Khosla et al. (2014). Dalam penelitian tersebut dilakukan komparasi terkait penggunaan metode manhattan distance
dan euclidean distance dalam sistem temu kembali citra dengan kategori orang, pantai, monument, bus, dinosaurus, gajah, bunga, kuda, gunung dan masakan. Hasil yang diberikan dari penggunaan manhattan distance yaitu didapatkan precision tertinggi berkisar 0,60, sedangkan euclidean distance precision
tertinggi berkisar 0,47.
Berdasarkan paparan di atas, maka pada penelitian ini dilakukan pengolah citra jalan aspal berlubang dengan mamanfaatkan 13 fitur pada sudut 0o, 45o, 90o dan 135o menggunakan
ekstraksi fitur GLCM. Serta memanfaatkan metode manhattan distance dalam penerapan sistem temu kembali citra lubang jalan aspal berdasarkan tingkat kerusakan. Harapan dari penelitian ini yaitu dapat memberikan informasi kepada pihak terkait mengenai kerusakan jalan berdasarkan tingkat kerusakan.
2. DASAR TEORI
2.1 Content Based Image Retrieval (CBIR)
CBIR merupakan temu kembali citra yang membandingkan antara citra yang ada pada basis data dengan citra query. Cara kerja dari CBIR yaitu dilakukan dengan mengukur nilai jarak dari suatu query dengan citra yang ada pada basis data atau bisa disebut dengan image distance measure (Rangkuti, 2011).
2.2 Manhattan Distance
Manhattan distance atau biasa disebut L1
distance merupakan pengembangan dari metode
Lp norm. Metode ini bekerja dengan menghitung jarak yang paling pendek antara dua poin (Sharma & Batra, 2014).
𝑀𝐻(𝑎, 𝑏) = |𝑥1− 𝑦2| + |𝑥2− 𝑦2| + ⋯ |𝑥𝑛− 𝑦𝑛|
= ∑𝑛𝑘=1|𝑥𝑘− 𝑥𝑘|
(1)
Keterangan:
𝑎 = data query
𝑥1,𝑥2, . . , 𝑥𝑛= fitur data query
𝑦1,𝑦2, . . , 𝑦𝑛= fitur basis data
2.3 Bilateral Filter
Bilateral Filter merupakan salah satu metode untuk menghilangkan derau atau noise
pada citra namun tetap mempertahankan struktur (tepi) citra. Penggunaan bilateral filter
dapat menghilangkan lubang kecil sebagai
noise dan memperkuat hasil dari
thresholding(Jo & Ryu, 2015).
𝐵𝐹𝑝= 𝑊1𝑝 ∑𝑞∈Ω𝐺𝜎𝑠(𝑝 − 𝑞)𝐺𝜎𝑟(𝐼𝑝− 𝐼𝑞)𝐼𝑞 (2)
𝑊𝑝= ∑𝑞∈Ω𝐺𝜎𝑠(𝑝 − 𝑞)𝐺𝜎𝑟(𝐼𝑝− 𝐼𝑞) (3)
𝐺𝜎= 2𝜋𝜎12exp (− 𝑥 2
2𝜎2) (4)
Keterangan:
𝑝 = koordinat
𝑞 = koordinat pusat pixel (titik tengah)
Ω = semua pixel yang berada pada lingkungan kernel
𝐼𝑝, 𝐼𝑞= intensitas dari p dan q
𝐺𝜎𝑠(𝑝 − 𝑞)= perhitungan geometris jarak antara
p dan q
𝐺𝜎𝑟(𝐼𝑝− 𝐼𝑝)= perhitungan kedekatan fotometrik
antara 𝐼𝑝dan 𝐼𝑞
2.4 Deteksi Tepi Sobel
Metode Sobel merupakan metode deteksi tepi yang menggunakan operator sobel. Metode Sobel merupakan metode deteksi tepi yang menggunakan operator sobel (Jo & Ryu, 2015).
𝐺 = √|𝐺𝑥|2+ |𝐺𝑦|2 (5)
𝐺𝑥= (𝑎2+ 𝑐𝑎3+ 𝑎4) − (𝑎0+ 𝑐𝑎7+ 𝑎6)
𝐺𝑦= (𝑎0+ 𝑐𝑎1+ 𝑎2) − (𝑎6+ 𝑐𝑎5+ 𝑎4) (6)
Keterangan:
𝐺𝑥 = gradient sobel horizontal
𝐺𝑦 = gradient sobel vertikal
𝑎0, 𝑎1…𝑎7 = nilai pixel pada lingkungan kernel
sobel
2.5 Otsu Thresholding
Metode Otsu merupakan metode untuk mendapatkan nilai ambang batas dengan cara membagi histogram citra gray level menjadi dua daerah (Mirnasari & Adi, 2013).
𝑃(𝑖) = 𝑛𝑖
𝑁, 𝑃(𝑖) ≥ 0 𝑑𝑎𝑛 ∑2561 𝑃(𝑖) = 1 (7)
Keterangan:
𝑃(𝑖) = nilai probabilitas tiap pixel ke i
𝑛𝑖 = banyaknya nilai pixel yang muncul pada pixel ke i
𝑁 = banyaknya pixel yang muncul
𝜔1(𝑡) = ∑𝑡𝑖=1𝑃𝑖
𝜔2(𝑡) = ∑𝐿−1𝑖=𝑡+1𝑃𝑖 (8)
𝜇1(𝑡) = ∑𝑡𝑖=1𝜔𝑖𝑃1(𝑡)𝑖
𝜇2(𝑡) = ∑𝐿−1𝑖=𝑡+1𝜔𝑖𝑃2(𝑡)𝑖 (9)
𝜎𝐵2= 𝜎12(𝑡) ∗ 𝜔1(𝑡) + 𝜎22(𝑡) ∗ 𝜔2(𝑡)
𝜎12(𝑡) = ∑ [𝑖 − 𝜇𝑡𝑖=0 1(𝑡)]2 𝑃𝜔1(𝑡)𝑖
𝜎22(𝑡) = ∑ [𝑖 − 𝜇𝐿−1𝑖=0 2(𝑡)]2 𝑃𝜔2(𝑡)𝑖 (10)
𝜎22(𝑡) = ∑ [𝑖 − 𝜇𝐿−1𝑖=0 2(𝑡)]2 𝑃𝜔2(𝑡)𝑖 (11)
𝑡∗= 𝐴𝑟𝑔 𝑀𝑎𝑥
0≤𝑡 <𝐿{𝜎𝐵2(𝑡)} (12)
Keterangan:
𝜔1(𝑡), 𝜔2(𝑡)= probabilitas kumulatif kelas 1 dan
kelas 2
𝜇1(𝑡), 𝜇2(𝑡)= nilai mean kelas 1 dan kelas 2
𝜎12, 𝜎22 = variance kelas 1 dan kelas 2
𝐺(𝑥) = {1, 𝑗𝑖𝑘𝑎 𝑓0, 𝑗𝑖𝑘𝑎 𝑓(𝑥, 𝑦) < 𝑇(𝑥, 𝑦) ≥ 𝑇 (13)
Keterangan:
𝐺(𝑥) = citra hasil Otsu Thresholding
𝑓(𝑥, 𝑦) = nilai pixel pada titik ke 𝑥, 𝑦
𝑇 = nilai ambang batas hasil perhitungan metode otsu
2.6 Closing
Operasi closing berguna untuk
menghilangkan lubang-lubang kecil sebagai
noise dan menghaluskan kontur (Kadir, 2013).
𝐴 • 𝐵 = (𝐴 ⊕ 𝐵) ⊖ 𝐵 (14) Keterangan:
⊕
=
dilation
⊖
=
erosion
2.7 GLCM
GLCM merupakan salah satu metode yang digunakan untuk ekstraksi fitur tekstur pada citra . Sudut yang dibentuk dari nilai pixel citra ekstraksi fitur tekstur GLCM adalah 00, 450,
900, 1350 (Eleyan & Demirel 2011).
Langkah-langkah ekstraksi fitur GLCM adalah sebagai berikut:
1. Menghitung nilai matriks kookurensi awal dengan menggunakan sudut 00, 450, 900,
1350 dan d sebagai jarak pixel terhadap
tetangga yang diinginkan. Namun biasanya menggunakan d=1.
menjumlahkan nilai matriks kookurensi dengan tranposenya.
3. Melakukan normalisasi terhadap nilai matriks agar tidak menyebabkan ketergantungan, sehingga ketika dijumlahkan nilainya adalah 1.
4. Menghitung nilai ekstraksi fitur.
Terdapat 14 fitur ekstraksi tekstur GLCM yang diusulkan oleh (Haralick et al. 1973). 1. Homogeneity, Angular Second Moment
(ASM)
ASM atau energy digunakan untuk mengukur konsentrasi pasangan intensitas pada matriks co-occurrence.
𝐴𝑆𝑀 = ∑ ∑𝐺−1{𝑃(𝑖, 𝑗)}2 𝑗=0
𝐺−1
𝑖=0 (15)
2. Contrast
Contrast digunakan untuk mengukur variasi atau perbedaan intensitas tingkat keabuan dalam citra.
𝐶𝑜𝑛𝑡𝑟𝑎𝑠𝑡 = ∑𝐺−1𝑛2{
𝑛=0 ∑𝐺𝑖=1∑𝐺𝑗=1𝑃(𝑖, 𝑗)}, |𝑖 − 𝑗| = 𝑛 (16)
3. Correlation
Correlation digunakan untuk mengukur korelasi dan ketergantungan antara pixel
dengan tingkat keabuan i dan pixel dengan tingkat keabuan j pada citra.
𝐶𝑜𝑟𝑟𝑒𝑙𝑎𝑡𝑖𝑜𝑛 =
Variance digunakan untuk mengukur sebaran atau variasi nilai keabuan pada matiks kookurensi awal. Citra dengan sebaran derajat keabuan yang kecil akan menghasilkan variance yang kecil pula.
𝑉𝑎𝑟𝑖𝑎𝑛𝑐𝑒 = ∑ ∑𝐺−1(𝑖 − 𝜇)2𝑃(𝑖, 𝑗) 𝑗=0
𝐺−1
𝑖=0 (18)
5. Inverse Difference Moment (IDM)
IDM atau homogenitas digunakan untuk mengukur homogenitas variasi intensitas citra dengan tingkat keabuan sejenis.
𝐼𝐷𝑀 = ∑𝐺−1𝑖=0 ∑𝐺−1𝑗=01+(𝑖−𝑗)1 2𝑃(𝑖, 𝑗) (19)
6. Sum Average
Sum Average digunakan untuk mengukur banyaknya nilai rata-rata pixel pada distribusi tingkat keabuan.
𝐴𝑉𝐸𝑅 = ∑2𝐺𝑖=2𝑖𝑃𝑥+𝑦(𝑖) (20)
7. Sum Entropy
Sum Entropy digunakan untuk mengukur banyaknya tingkat keabu-abuan yang acak.
𝑆𝐸𝑁𝑇 = − ∑2𝐺𝑖=2𝑖𝑃𝑥+𝑦(𝑖)𝑙𝑜𝑔(𝑃𝑥+𝑦(𝑖)) (21)
8. Sum Variance
Sum Variance digunakan untuk mengukur seberapa banyak variasi tingkat keabuan dari nilai rata-rata
Entropy digunakan untuk mengukur tingkat ketidakaturan bentuk atau distribusi intensitas citra matriks co-occurrence.
𝐸𝑛𝑡𝑟𝑜𝑝𝑦 =
Difference Entropy digunakan untuk mengukur variasi perbedaan mikro (lokal).
𝐷𝐸𝑁𝑇 =
− ∑𝐺−1𝑖=0𝑖𝑃𝑥−𝑦(𝑖)𝑙𝑜𝑔(𝑃𝑥−𝑦(𝑖)) (24)
11. Difference Variance
Difference Variance digunakan untuk me variasi pixel lokal.
𝐷𝑉𝐴𝑅 = − ∑ 𝑖2𝑃 𝑥−𝑦(𝑖) 𝐺−1
𝑖=0 (25)
12. Information Measure of Correlation 1
𝑓
12=
max {𝐻𝑋,𝐻𝑌}𝐻𝑋𝑌−𝐻𝑋𝑌1 (26)13. Information Measure of Correlation 2
𝑓13= (1 − exp[−2.0(𝐻𝑋𝑌2 − 𝐻𝑋𝑌]))1⁄2
14. Maxima Correlation Coefficient
𝑓14= (Nilai 𝑒𝑖𝑔𝑒𝑛 terbesar kedua dari Q)1⁄2 probabilitas marjinal yang diperoleh dari penjumlahan baris 𝑃(𝑖, 𝑗)
Dari 14 fitur yang diusulkan oleh Haralick tersebut, hanya 13 fitur yang digunakan. Fitur
digunakan karena ketidakstabilan dalam komputasi (Haralick et al., 1973)
3. PENGUMPULAN DATA
Data diperoleh melalui observasi secara langsung untuk mendapatkan basis data sesuai dengan permasalahan pada penelitian ini. Digunakan data primer berupa pengambilan citra lubang jalan, pengukuran kedalaman dan panjang lubang jalan. Pengumpulan data diperoleh langsung di beberapa ruas jalan jalan Nasional dan jalan Provinsi wilayah Kediri, serta beberapa ruas jalan Kota Malang. Citra lubang jalan diambil menggunakan kamera
handphone Samsung Galaxy Note 3 SM-N900 13MP dan Iphone 5 8MP yang diambil dengan jarak 1 meter dan sudut 180o dari permukaan
tanah pada pukul 09.00-12.00 WIB dan 15.00-18.00 WIB. Sedangkan untuk pengukuran kedalaman dan panjang lubang jalan menggunakan alat meter ukur. Total citra lubang yang dikumpulkan sebanyak 117 citra yang terdiri dari citra lubang jalan dengan tingkat kerusakan L (Low) atau rusak ringan 33 citra, M (Medium) atau rusak sedang 42 citra dan H (High) atau rusak parah 25 citra. Citra dengan tiga tingkat kerusakan tersebut dapat dilihat pada Gambar 1.
(a) (b) (c)
Gambar 1. (a) Lubang jalan aspal rusak ringan (L), (b) Lubang jalan aspal rusak sedang (M), (c) Lubang
jalan aspal rusak parah (H)
4. RANCANGAN ALGORITME
Langkah awal yang dilakukan oleh sistem yaitu pre-processing.
Pada
tahap pre-processing dilakukan pengubahan citra masukkan baik citra korpus maupun citra queryke skala keabuan kemudian dilakukan filtering
menggunakan bilateral filter guna
menghaluskan area sekitar lubang jalan aspal dan mempertajam tekstur kekasaran dari struktur tepi citra. Selanjutnya dilakukan deteksi tepi menggunakan sobel yang bertujuan untuk mendeteksi tepian dari lubang jalan. Setelah didapatkan tepi dari lubang jalan, dilakukan thresholding guna mempertegas tepian yang telah terdeteksi. Hasil dari deteksi tepi yang masih berupa citra keabuan diubah mencari citra biner. Pre-processing yang
dilakukan selanjutnya yaitu morfologi dengan
menggunakan operator closing guna
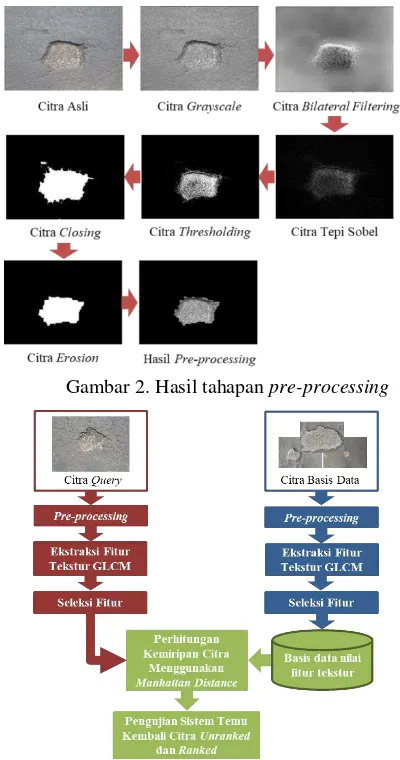
mendapatkan bentuk dari lubang jalan dengan cara mempertebal area di dalam lubang jalan dan menghilangkan lubang-lubang kecil di luar area lubang jalan. Metode morfologi lain yang diterapkan yaitu erosion guna menghilangkan lubang-lubang kecil yang masih ada setelah proses closing. Pada Gambar 2 menunjukkan hasil pre-processing mulai dari citra lubang jalan asli hingga tersegmentasi.
Gambar 2. Hasil tahapan pre-processing
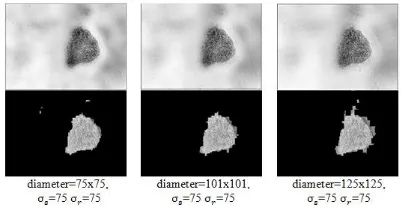
Gambar 3. Diagram alir keseluruhan
Hasil pre-processing yang didapatkan yaitu berupa citra lubang jalan keabuan tersegmentasi. Dari hasil pre-processing
kemudian dilakukan ekstraksi fitur tekstur GLCM menggunakan 13 fitur dengan sudut 0o,
45o, 90o dan 135o sehingga didapatkan 52 fitur.
Hasil yang diberikan oleh sistem yaitu citra lubang jalan yang memiliki tingkat kerusakan yang mirip dengan dengan citra query. Sistem diimplementasikan menggunakan Bahasa pemrograman Python. Pada Gambar 3 menunjukkan alur dari sistem secara keseluruhan.
5. HASIL DAN PEMBAHASAN
5.1 Pengujian nilai diameter kernel bilateral filter, 𝝈𝒔dan 𝝈𝒓
Pengujian nilai diameter kernel bilateral filter, 𝜎𝑠 dan 𝜎𝑟dilakukan pada proses perhitungan bilateral filter. Pengujian dilakukan dengan diameter kernel operasi
closing sebesar 15x15 dan erosion sebesar 3x3. Tujuan dilakukan pengujian ini untuk mengetahui kualitas citra pre-processing.
Tabel 1. Hasil Pengujian nilai diameter kernel bilateral filter
𝛔𝐬dan 𝛔𝒓 Diameter 75 kernel101 bilateral filter 125
50 dan 50 28 32 30
50 dan 75 25 35 33
50 dan 100 24 35 30
75 dan 50 29 84 80
75 dan 75 51 117 80
75 dan 100 48 93 75
100 dan 50 56 82 75
100 dan 75 51 81 79
100 dan 100 40 81 74
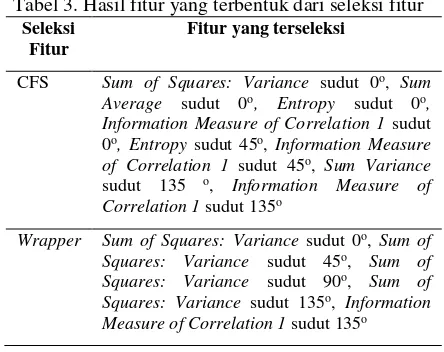
Berdasarkan Tabel 5, citra lubang jalan aspal yang berhasil tersegmentasi dengan tepat yaitu sebanyak 117 citra dengan nilai diameter= 101, 𝜎𝑠= 75 dan 𝜎𝑟=75. Apabila berdasarkan diameter kernel, penggunaan kernel dengan ukuran 75x75 masih didapati banyak citra dari hasil proses bilateral filter yang belum menutupi area selain objek lubang jalan. Hal ini dikarenakan ukuran diameter yang terlalu kecil, sehingga penggunaan nilai parameter 𝜎𝑠 dan 𝜎𝑟 belum memberikan dampak pengaburan yang tepat pada beberapa citra dan masih didapati adanya derau. Sedangkan apabila nilai diameter kernel terlalu besar dengan ukuran 125x125, kemungkinan citra hasil proses
bilateral filter akan semakin memperlebar tepian yang dipertahankan atau semakin memperburam citra hingga menutupi objek lubang jalan.
Ketika nilai 𝜎𝑠= 50, banyaknya citra lubang jalan yang tersegmentasi dengan tepat cenderung paling sedikit. Hal tersebut dikarenakan nilai σs yang terlalu kecil tidak
memberikan dampak yang terlalu besar dalam melakukan penghilangan derau. Dan ketika nilai 𝜎𝑠= 100, banyaknya citra lubang jalan tersegmentasi dengan tepat tidak lebih banyak dibandingkan ketika 𝜎𝑠= 75. Hal tersebut dikarenakan objek berupa lubang jalan semakin kabur dan tepian objek yang seharusnya dipertahankan juga menjadi kabur.
Gambar 4. Hasil bilateral filtering dan pre-processing akhir dengan ukuran diameter kernel
yang berbeda-beda pada basis data ke-27
Gambar 5. Hasil bilateral filtering dan pre-procesing akhir dengan nilai 𝜎𝑠 yang berbeda-beda
pada data ke-27
Gambar 6. Hasil bilateral filtering dan pre-procesing akhir dengan nilai𝜎𝑟 yang berbeda-beda
pada data ke-27
area selain objek dengan baik pada beberapa citra, namun pada citra lainnya menyebabkan derau muncul kembali.
5.2 Pengujian pada nilai d
Pengujian nilai d merupakan pengujian parameter ekstraksi fitur GLCM yang menentukan hasil pembentukan nilai matriks awal berdasarkan jarak pixel. Pengujian ini dilakukan dengan data yang telah dilakukan seleksi fitur menggunakan Wrapper. Variasi nilai d yang digunakan pada pengujian ini yaitu
d=1, d=2, d=3, d=4 dan d=5.. Pengujian ini dilakukan dengan nilai parameter bilateral filter diameter=100,𝜎𝑟= 75, 𝜎𝑠=75, dan parameter n
yaitu n=5, n=10, n=15, n=20 dan n=25. Tujuan dari pengujian ini yaitu untuk mengetahui pengaruh nilai parameter GLCM d terhadap hasil akurasi.
Tabel 2. Hasil pengujian nilai d
Nilai dengan hasil akurasi rata-rata yang didapatkan yaitu sebesar 55.08%, sedangkan pada saat d=6 dan d=7 akurasinya mendekati saat nilai d=1. Hal ini dikarenakan hasil nilai matriks awal dengan d=6dan d=7 hampir sama dengan d=1. Sedangkan ketika d=2 nilai akurasi menurun karena dari nilai matriks awal yang didapatkan tidak mereprepresentasikan nilai yang tepat untuk didapatkan ekstraksi fitur yang baik. Dari pengujian di atas dapat disimpulkan bahwa nilai jarak pixel (d) memengaruhi akurasi dari penerapan algoritma GLCM. Selain itu didapatkan nilai rata-rata akurasi tertinggi yaitu 55.08% dengan nilai d=1 walaupun ketika nilai
d=1 sistem membutuhkan waktu komputasi yang lebih lama dibandingkan dengan nilai d
yang semakin besar.
5.3 Pengujian metode seleksi fitur
Tabel 3. Hasil fitur yang terbentuk dari seleksi fitur
Seleksi Fitur
Fitur yang terseleksi
CFS Sum of Squares: Variance sudut 0o, Sum
Average sudut 0o, Entropy sudut 0o,
Information Measure of Correlation 1 sudut 0o, Entropy sudut 45o, Information Measure
of Correlation 1 sudut 45o, Sum Variance sudut 135 o, Information Measure of
Correlation 1 sudut 135o
Wrapper Sum of Squares: Variance sudut 0o, Sum of
Squares: Variance sudut 45o, Sum of
Squares: Variance sudut 90o, Sum of
Squares: Variance sudut 135o, Information
Measure of Correlation 1 sudut 135o
Tabel 4. Pengujian metode seleksi fitur menggunakan unranked retrieval Akurasi, d=1
Metode
Tabel 5. Pengujian metode seleksi fitur menggunakan ranked retrieval MAP, d=1
Metode
Pengujian metode seleksi fitur merupakan pengujian pada perhitungan GLCM yang dilakukan sebelum seleksi fitur dan sesudah seleksi fitur. Fitur yang digunakan sebelum dilakukan seleksi fitur yaitu sebanyak 52 fitur. Metode seleksi fitur yang digunakan yaitu CFS dan Wrapper. Dengan nilai parameter bilateral filter diameter=100, 𝜎𝑟= 75, 𝜎𝑠=75, nilai parameter GLCM d=1 dan nilai parameter n
yaitu n=5, n=10, n=15, n=20, n=25. Tujuan dari pengujian ini yaitu untuk mengetahui pengaruh seleksi fitur terhadap hasil temu kembali citra yang ditunjukkan dengan unranked retrieval
menggunakan MAP.
Jika dilihat berdasarkan Tabel 4 dan Tabel 5, hasil seleksi fitur menggunakan metode CFS memiliki rata-rata akurasi dan MAP yang lebih rendah dibandingkan dengan metode seleksi
Wrapper. Hasil tersebut diperoleh setelah dilakukan percobaan sebanyak lima kali dengan nilai n yang berbeda-beda pada masing-masing metode seleksi fitur. Bahkan, metode seleksi fitur CFS cenderung memiliki hasil akurasi dan MAP yang lebih kecil dibandingkan dengan sebelum dilakukan seleksi fitur.
Dalam hal ini terlihat bahwa metode seleksi fitur CFS kurang efektif apabila digunakan untuk kasus sistem temu kembali lubang jalan aspal. Hal ini dikarenakan metode seleksi fitur CFS membentuk fitur yang memiliki korelasi rendah dengan fitur lainnya. Fitur yang terbentuk justru menyebabkan performa sistem menjadi menurun. Fitur tersebut yaitu Sum Variance pada sudut 135 o.
Selain itu, fitur lain yang terbentuk tidak memiliki korelasi dengan fitur lainnya . Fitur tersebut yaitu Entropy dengan sudut 0o dan
sudut 45o. Akibat tidak memiliki korelasi
dengan fitur lain, fitur tersebut tidak memberikan kontribusi terhadap performa sistem.
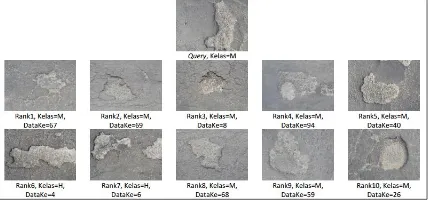
Gambar 7. Hasil temu kembali citra pada data ke 10 menggunakan metode Wrapper, n=10, d=1
Metode seleksi fitur Wrapper lebih efektif untuk digunakan dibandingkan dengan metode seleksi fitur CFS. Meskipun hanya terbentuk 5 fitur, metode seleksi fitur Wrapper mampu menghasilkan nilai akurasi dan MAP yang
relative lebih tinggi dibandingkan dengan metode seleksi fitur CFS maupun tanpa menggunakan metode seleksi fitur. Hal ini dikarenakan metode seleksi fitur Wrapper
membentuk subset fitur-fitur terbaik. Metode
Wrapper mampu memberikan nilai dan akurasi yang tinggi karena 4 dari 5 fitur yang terbentuk merupakan fitur Sum of Squares: Variance
dengan sudut 0 o, 45 o, 90 o dan 135 o. Dimana
fitur tekstur Sum of Squares: Variance
merepresentasikan tingkat keabuan yang beragam dari nilai rata-rata citra lubang jalan aspal. Terbentuknya fitur Sum of Squares
dengan empat sudut tersebut memberikan kontribusi satu sama lain sehingga mampu meningkatkan performa sistem.
Dari kedua metode seleksi fitur yang diterapkan, keduanya memberikan hasil seleksi fitur yang saling beririsan satu sama lain. Fitur yang beririsan yaitu Sum of Squares: Variance
sudut 0o dan Information Measure of
Correlation 1 sudut 135o. Tidak adanya kedua
fitur tersebut menyebabkan performa sistem menjadi menurun. Sehingga, penggunaan kedua fitur tersebut menjadi penting karena dapat meningkatkan performa dari sistem temu kembali.
Berdasarkan hasil evaluasi yang telah dilakukan, ditunjukkan pada Tabel 3 bahwa penggunaan metode Wrapper ketika nilai n
semakin besar, akurasi yang dihasilkan justru semakin kecil. Hal ini dikarenakan citra pada basis data dengan tingkat kerusakan yang sama dengan citra query tidak semakin bertambah ketika nilai n semakin bertambah. Munculnya citra yang tidak relevan pada urutan atas dikarenakan nilai tekstur berupa distribusi tingkat keabuan pada beberapa dataset dengan tingkat kerusakan yang berbeda dinilai memiliki kemiripan.
Berdasarkan Tabel 4, dapat dilihat bahwa metode Wrapper menghasilkan nilai MAP berbeda-beda pada nilai n yang berbeda. Nilai MAP tertinggi yaitu ketika nilai n=5 dengan nilai MAP=0,797. Sedangkan nilai MAP terendah yaitu ketika nilai n=4 dengan nilai MAP=0,637. Nilai MAP yang rendah disebabkan karena data yang tidak relevan berada pada peringkat atas.
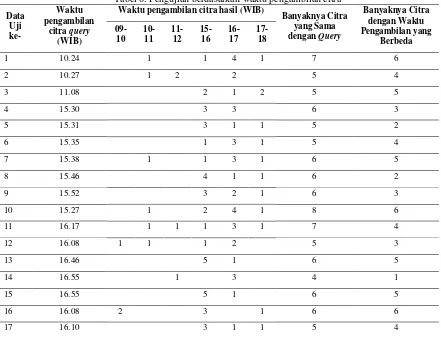
5.4 Pengujian waktu pengambilan citra Pengujian berdasarkan waktu pengambilan citra dilakukan menggunakan metode seleksi fitur Wrapper dengan nilai parameter bilateral filter diameter=100, 𝜎𝑟= 75, 𝜎𝑠=75, parameter GLCM d=1 dan n=10. Waktu pengambilan citra terbagi menjadi tiga yaitu pukul 9-12, pukul 12-15 dan pukul 12-15-18. Tujuan pengujian ini yaitu
untuk mengetahui keragaman waktu
Tabel 6. Pengujian berdasarkan waktu pengambilan citra
Data Uji ke-
Waktu pengambilan
citra query
(WIB)
Waktu pengambilan citra hasil (WIB)
Banyaknya Citra yang Sama dengan Query
Banyaknya Citra dengan Waktu Pengambilan yang
Berbeda
09-10
10-11
11-12
15-16
16-17
17-18
1 10.24 1 1 4 1 7 6
2 10.27 1 2 2 5 4
3 11.08 2 1 2 5 5
4 15.30 3 3 6 3
5 15.31 3 1 1 5 2
6 15.35 1 3 1 5 4
7 15.38 1 1 3 1 6 5
8 15.46 4 1 1 6 2
9 15.52 3 2 1 6 3
10 15.27 1 2 4 1 8 6
11 16.17 1 1 1 3 1 7 4
12 16.08 1 1 1 2 5 3
13 16.46 5 1 6 5
14 16.55 1 3 4 1
15 16.55 5 1 6 5
16 16.08 2 3 1 6 6
17 16.10 3 1 1 5 4
Berdasarkan hasil pengujian terhadap pengambilan waktu citra pada Tabel 6 menunjukkan bahwa waktu pengambilan citra yang lebih sering muncul yaitu antara pukul 15.00-18.00 WIB. Hal tersebut dikarenakan basis data pada pukul tersebut lebih banyak dibandingkan dengan basis data pada pukul 09.00-12.00 WIB. Selain itu, basis data pada pukul 09.00-12.00 WIB lebih didominasi dengan tingkat kerusakan H atau rusak parah yaitu sebanyak setengah lebih dari basis data pukul 09.00-12.00 WIB. Sedangkan, data uji citra query untuk tingkat kerusakan H hanya terdapat 2 data. Hal tersebut menjadikan citra yang muncul antara pukul 09.00-12.00 WIB menjadi sedikit. Waktu pengambilan citra memberikan pengaruh terhadap intensitas pixel
citra karena pengaruh pencahayaan. Namun, pada penelitian ini apabila dilihat berdasarkan waktu pengambilan perjamnya, hasil temu kembali citra dengan tingkat kerusakan yang sama dengan citra query masih dapat mengenali citra dengan waktu pengambilan yang berbeda dengan citra query. Dari pengujian yang telah dilakukan dapat disimpulkan bahwa waktu
pengambilan citra tidak memberikan pengaruh
terhadap sistem temu kembali citra karna sistem masih mampu mengenali citra dengan waktu pengambilan yang berbeda dengan citra query.
6. KESIMPULAN
Berdasarkan pengujian dan analisis yang telah dilakukan, didapatkan kesimpulan sebagai berikut:
dengan tingkat kerusakan yang sama walaupun dengan waktu pengambilan yang berbeda.
2. Penggunaan metode seleksi fitur Wrapper pada ekstraksi fitur tekstur GLCM d=1 mampu meningkatkan performa dari sistem temu kembali citra lubang jalan aspal. Setelah menggunakan metode seleksi fitur Wrapper didapatkan nilai rata-rata akurasi dan MAP dengan nilai n=5, n=10, n=15, n=20 dan n=25 yaitu sebesar 55,61% dan 0,710. Sedangkan penggunaan metode seleksi fitur CFS tidak meningkatkan performa dari sistem karena menghasilkan akurasi dan MAP yang tidak lebih baik dibandingkan sebelum dilakukan metode seleksi fitur. Akurasi dan MAP yang dihasilkan masing-masing yaitu 38,84% dan 0,515. Dalam hal ini, metode seleksi fitur CFS dianggap kurang efektif apabila digunakan untuk kasus sistem temu kembali lubang jalan aspal.
7. SARAN
Penelitian yang telah dilakukan masih jauh dari kata sempurna dan perlu dilakukan banyak pengembangan. Adapun beberapa saran untuk penelitian selajutnya yaitu:
1. Perlu dilakukan penelitian lebih lanjut terkait penggunaan metode ekstraksi tekstur lain.
2. Perlu dilakukan penambahan metode untuk menghitung kedalaman dari lubang jalan aspal untuk meningkatkan akurasi sistem agar didapatkan tingkat kerusakan jalan yang sesuai pada citra temu kembali.
8. DAFTAR PUSTAKA
Biro Komunikasi Publik Kementrian PUPR, 2017. Tim Sapu Lubang Kementrian PUPR Selesaikan 99,08 Persen Penutupan Lubang di Jawa Timur. Available at: https://www.pu.go.id/berita/view/11359/ti
m-sapu-lubang-kementerian-pupr- selesaikan-99-08-persen-penutupan-lubang-di-jawa-timur
Eleyan, A. & Demirel, H., 2011. Co-occurrence matrix and its statistical features as a new approach for face recognition. Turk J Elec Eng & Comp Sci, 19(1), pp.97–107. Haralick, R.M., Shanmugam, K. & Dinstein, I.,
1973. Textural Features for Image Classification. IEEE Transactions on Systems, Man, and Cybernetics,
SMC-3(6), pp.610–621. Available at:
http://ieeexplore.ieee.org/document/43093 14/.
Idestio, B.D., Agung, T. & Wirayuda, B., 2013. Pengukuran Luas Lubang Jalan Berbasis Data Video Menerapkan Threshold-based Marking dan GLCM. INKOM, 7(2), p.235.
Jo, Y. & Ryu, S., 2015. Pothole detection system using a black-box camera. Journal of Emerging Trends in Computing and Information Sciences, 15(11), pp.29316– 29331.
Kadir, Abdul & Adhi Susanto. 2013. Teori dan Aplikasi Pengolahan Citra. Yogyakarta: Penerbit Andi.
Khosla, G., Rajpal, N. & Singh, J., 2014. Evaluation of Euclidean and Manhanttan Metrics In Content Based Image Retrieval System. Int. Journal of Engineering Research and Applications, 4(9), pp.43– 49.
Koch, C. & Brilakis, I., 2011. Pothole detection in asphalt pavement images. Advanced Engineering Informatics, 25(3), pp.507– 515. Available at:
http://dx.doi.org/10.1016/j.aei.2011.01.00 2.
Mirnasari, N. & Adi, K., 2013. Aplikasi Metode Otsu untuk Identifikasi Bakteri
Tuberkolosis Seceara Otomatis. Youngster Physics Journal, 2(1), pp.13–20.
Punjabi, H. et al., 2014. Intelligent Pothole Detection System. International Journal of Emerging Technology and Advanced Engineering, 4(7).
Rangkuti, A.H., 2011. Analisis Seleksi Citra Mirip Dengan Memanfaatkan Konsep Cbir Dan Algoritma Threshold. ComTech, Vol.2 No.2, pp.715–725.
Sharma, M. & Batra, A., 2014. Analysis of Distance Measures in Content Based Image Retrieval. Global Journal of Computer Science and Technology: G Interdisciplinary, 14(2).
Wen, C. & Guyer, D., 2012. Image-based orchard insect automated identification and classification method. Computers and Electronics in Agriculture, 89, pp.110– 115. Available at: