UMUM
Pada bab perencanaan ini akan dibahas perencanaan perangkat keras (hardware) dan perencanaan perangkat
lunak (software) serta pembuatannya.
GAMBAR 3.1
BLOK DIAGRAM PENGUKUR DETAK JANTUNG DAN PANAS TUBUH
Minimum sistera yang digunakan pada perangkat keras ini
adalah microcontroller 8031. Selain itu dibahas menge-
nai transduser suhu dan transduser detak jantung,
rangkaian penguat dari transduser, rangkaian ADC, dan rangkaian display yang merupakan output dari microcon
troller 8031.
2. PERENCANAAN PERANGKAT KERAS
Perencanaan perangkat keras untuk alat pengukur detak jantung dan panas tubuh terpusat pada sistem minimum 8031.
Sistem minimum microcontroller 8031 yang terdiri dari EPROM 2764, RAM 6116, PPI 8255, decoder 74LS138 beserta sinyal kontrol, display serta transduser yang merupakan input bagi minimum sistem.
Eprom yang digunakan 2764 berkapasitas 8192 X 8 bit.
Eprom ini berfungsi untuk menyimpan program kontrol yang akan mengendalikan semua aktifitas didalam sistem m i n i m u m .
RAM yang dipergunakan untuk menyimpan data hasil pembacaan detak jantung maupun panas tubuh yang diinginkan untuk disimpan.
RAM yang dipergunakan untuk menyimpan data hasil pengukuran adalah jenis 6116.
Untuk PPI 8255 digunakan sebagai I/O port yang dihubungkan dengan sistem ke display sebagai jalur outp u t .
Bagian yang tidak kalah pentingnya adalah dekoder dan
sinyal kontrol. Dekoder berfungsi membangkitkan CS/CE dari suatu piranti pada suatu jangkauan alamat tertentu, atau dengan kata lain mengatur pengalamatan piranti tersebut. Sedangkan sinyal kontrol berfungsi untuk mengaktifkan buffer data piranti-piranti, mengatur arah perpindahan data antara microcontroller dan piranti-piranti.
2.1 Rangkaian Pendukung. Dari Minimum Sisten. 8031
Rangkaian ini merupakan pendukung dari rangkaian pembangkit sinyal clock dan rangkaian reset.
2.1.1 Rangkaian Clock. Mikrokontroller 8031 mempunyai pembangkit waktu dalam (internal timing generation) sebagai sumber clock.
Pemilihan frekuensi kristal ini sebenarnya sangat erat hubungannya dengan baud rate pada komunikasi serial, namun pada perencanaan dalam tugas akhir ini komunikasi serial tidak digunakan. Dalam hal ini digunakan kristal dengan frekuensi sebesar 11 M h z .
Masing-masing kaki kristal ini dihubungkan dengan
kapasitor 20 pF dan kristal ini dihubungkan dengan
kaki 18 dan 19 dari 8031. Rangkaian clock dapat
dilihat pada gambar 3.2.
2 0 l» F
--- - H H U B E E O
q 1 1 m H Z
ez=BEO>
GAMBAR 3.2 RANGKAIAN CLOCK
2.1.2 Rangkaian Reset. Rangkaian reset ini terdiri dari sebuah tahanan, sebuah kapasitor, sebuah saklar tekan dan inverter 74LS04.
Gambar 3.3 menunjukkan rangkaian reset 8031. Pin 9 pada mikrokontroller ini merupakan input dari Schmitt-triger.
Mikrokontroller 8031 membutuhkan lebar pulsa reset minimum dua siklus kerja (24 periode osilator).
Analisa rangkaian ini dilakukan pada kondisi rendah (kondisi '0'). Pada tegangan dengan kondisi rendah maksimum input Schmitt-trigger adalah 0,8 Volt, dan lebar pulsa reset logika '0' harus lebih besar dari dua siklus mikrokontroller.
Dari rumus : ^reset = ^ c c ^ “e t/RC^
Frekuensi kristal yang dipakai 11 Mhz akan
diperoleh satu siklus kerja sebesar 0,091 (is.
Jika pulsa reset minimum diambil 3 kali, maka : t = 3 X 0,091 us
V reSet = Volt dan Vcc = 5 Volt Maka akan diperoleh konstanta waktu (RC) rangkaian reset yaitu :
Agar didapat pulsa reset yang lebih besar, dengan memperhatikan komponen yang ada, maka dipilih
RC = 47 ms ; dimana C = 10 p.F
maka akan diperoleh harga tahanan R = 4,7 K, dan dengan rumus diatas diperoleh waktu reset t = 8,2 ms .
RC = 1, 566 us
GAMBAR 3.3
RANGKAIAN RESET 8031
2.2 Dekoder Dan. Sinyal Kontrol
Untuk menghubungkan mikrokontroller 8031 dengan piranti-piranti lain diperlukan suatu dekoder serta sinyal kontrol. Berikut ini akan dijelaskan rangkaian-rangkaian yang membentuk membentuk blok dekoder serta sinyal kontrol.
2.2.1 Dekoder Mikrokontroller 8031 mempunyai dua peta alamat memori. Dalam perencanaan ini peta alamat memori program dan peta alamat memori data dijadikan satu peta alamat memori. Peta alamat memori ini dapat dilihat pada gambar 3.4, peta alamat memori ini mempunyai interval 2 Kbytes, yang berawal dari alamat OOOOH-1FFFH untuk alamat EPROM, karena digunakan EPROM 2764 dengan kapasitas memori 8 Kbytes, sedangkan alamat 2000H-27FFH untuk RAM 6116 dengan kapasitas memory 2 Kbytes, sedangkan alamat 2800H-2FFFH untuk PPI 8255, sedangkan alamat diatasnya kosong.
Rangkaian dekoder ini dipakai untuk mengaktifkan
EPROM, RAM dan PPI 8255. Gambar 3.5 menunjukkan
rangkaian dekoder. Dimana IC yang dipakai adalah
74LS138, dengan input A, B dan C yang dihubungkan
dengan All, A12 dan A13 dari mikroprosessor 8031,
sedangkan pin G2A dan G2B dihubungkan dengan A14
dan A15 serta pin G1 dari 74LS138 ini dihubungkan
FFFFH
3000H 2FFFH 2800H 27FFH 2000H 1FFFH OOOOH
GAMBAR 3.4 PETA ALAMAT MEMORI
dengan V c c . Kombinasi dari input A, B dan C digunakan untuk pemilihan output yang dikehendaki aktif. Kesemua output dari 74LS138 aktif dalam kondisi rendah (LOW). Tabel kebenaran dari IC 74LS138 dilihat pada tabel 3.1. Karena pada peta alamat memori digunakan interval 2 Kbytes, maka untuk EPROM dipakai 4 output dari 74LS138 yaitu YO, Yl, Y2 dan Y3. Keempat output dari 74LS138 ini dihubungkan dengan gerbang AND yaitu IC 74LS08 yang mempunyai 4 gerbang AND (gambar 3.5), dimana output terakhir dari gerbang yaitu pin 11 dihubungkan dengan CS dari EPROM 2764, sedangkan Y4 dihubungkan
K
0
S
0
N
G
PPI
8255
RAM
6116
EPROM
2764
dengan CS dari RAH 6116 dan Y5 dihubungkan ke CS dari 8255.
2.2.2 Sinyal Control Sinyal kontrol untuk
dipakai untuk mengatur memori ini adalah PSEN, RD dan WR, dimana PSEN dan RD dihubungkan ke gerbang AND. yang mana output dari
PSSH.
W R
- U Bl.
7'4TT50a
>
[ _ H.
i 9
15
—‘ Ha]
74CS
> 1
Be
JLi 1U2-
73C5B8 > IX.
-EE=33
ZZZS3
= >-d!E CS 6 L l i O -(HE C S -B 2 !aS Z >
K E O E 2 7 6 4
"D O N O E 6 1 IS
K E W E 6 1 1 6
“D A N W R 8 2 S S
GAMBAR 3.5 RANGKAIAN DEKODER
gerbang ini dihubungkan ke OE dari 2764, ke OE 6116
dan ke OE dari 8255. Sinyal PSEN dan sinyal RD ini
akan aktif secara bergantian, dimana bila PSEN yang
aktif (dalam keadaan low) maka RD tidak aktif
(dalam kondisi high) dan memori yang aktif adalah
TABEL 3.1
TABEL KEBENARAN IC 74LS138
INPUT OUTPUT PIRANTI
C B A Y0 Y1 Y2 Y3 Y4 Y5 Y6 Y7
0 0 0 0 1 1 1 1 1 1 1 2764
0 0 1 1 0 1 1 1 1 1 1 2764
0 1 0 1 1 0 1 1 1 1 1 2764
0 1 1 1 1 1 0 1 1 1 1 2764
1 0 0 1 1 1 1 0 1 1 1 6116
1 0 1 1 1 1 1 1 0 1 1 8255
1 1 0 1 1 1 1 1 0 1
K0S0NG
1 1 1 1 1 1 1 1 1 1 0
EPROM 2764, sedangkan bila sinyal RD yang aktif (dalam kondisi low) maka PSEN tidak aktif (dalam kondisi high), sedangkan memori yang aktif adalah RAM dan PPI 8255. Sinyal WR dihubungkan dengan WE (Write Enable) dari 6116 dan ke WR dari 8255.
2.3 Hubungan Angara 8031 Dengan Eprom 2764
Pada 8031 port 0 merupakan alamat bawah (low
addres) yang dimultipleks dengan data bus. Untuk
mengatasi hal ini digunakan IC 74LS373 untuk
melatch port, maka dengan demikian data dan
alamat dapat dipisahkan dimana output dari 74LS373 merupakan alamat A0-A7 yang dihubungkan dengan jalur alamat dari EPROM 2764 dan port 2 (A8-A12) juga dihubungkan dengan alamat dari EPROM (A8-A12), sedangkan jalur data dari EPROM juga dihubungkan dengan jalur data yang dikeluarkan oleh 8031. Pin OE dari EPROM dihubungkan dengan output gerbang AND yang merupakan kombinasi dari PSEN dan RD seperti yang telah dibahas dalam rangkaian dekoder.
AO oo
A L Ol
A2 02
A 3 03
A4 04
A S w r O S
A6 06
A 7 07
AQ A9 A l O A l l A 12
i r V P P
27&T
L -O V C C
E
5
HHEEE5
EESeoxr
GAMBAR 3.6
HUBUNGAN 8031 DENGAN EPROM 2764
Sedangkan untuk mengaktifkannya, maka CS dihubungkan dengan output dari gerbang AND yang mana gerbang AND ini mendapat input dari Y0-Y3 dari output IC 7 4 L S 1 3 8 . Gambar 3.6 menunjukkan hubungan 8031 dengan EPROM 2764.
2.4 Hubungan Antara 8Q31 Dengan RAM. GJLlfl
RAM 6116 digunakan untuk menyimpan data yang akan dimasukkan. Dalam hal ini alamat port 0 dari 8031 juga arus melewati IC 74LS373 dengan output dari
ETf/vP P O . O
P O . 1
X I P O . 2
P O . 3 P O . 4
X 2 P O . S
P O . 6 P O . 7 R E S E T
P 2 . 0 P 2 . 1
I N T O P 2 . 2
I N T 1 P 2 . 3
T O P 2 . 4
T 1 P 2 . S
P 2 . 6
P l . O P 2 . 7
P I . 1 P I . 2
P I . 3
m
P I . 4 P S E K
A L E / P P I . 5
P I . 6 T X D
P I . 7 R X O
6G3TT
A O D O
A 1 D 1
A 2 D 2
A 3 0 3
A 4 0 4
A S O S
A 6 0 6
A 7 0 7
A 8 A S A i O
stir
T>AftI DEk<>~PE7fl
GAMBAR 3.7
HUBUNGAN 8031 DENGAN RAM 6116
IC ini merupakan alamat A0-A7 yang dihubungkan dengan alamat bus dari RAM 6116, sedangkan alamat yang lain didapat dari port 2 (A8-A10). Data bus dari RAM juga dihubungkan dengan data bus yang dikeluarkan oleh 8031. Sinyal untuk OE dihubungkan juga dengan output dari gerbang AND seperti pada sinyal OE dari EPROM, sedangkan sinyal WE dari 8031 dan untuk mengaktifkannya, maka CS dihubung
kan dengan output dari 74LS138 yaitu Y 4 . Gambar 3.7 menunjukkan hubungan 8031 dengan RAM 6116.
2.5 Hubungan Antara S&3JL Dengan. EEX 8255.
Dalam perencanaan ini data bus dari 8031 yaitu port 0 dihubungkan dengan dengan data bus dari 8255. Pada 8255 ini juga terdapat alamat A0 dan Al, dimana A0 dan Al dihubungkan dengan output dari 74LS373 alamat A0 dan Al juga. Sinyal RD dihubung
kan dengan output gerbang AND seperti pada OE dari
EPROM dan RAM, sedangkan sinyal WR dihubungkan
langsung ke WR dari 8031. Rangkaian reset dari 8255
diambil dari rangkaian reset 8031 yang sama-sama
aktif dalam kondisi tinggi (high). Untuk mengaktif-
kan 8255, maka CS yang aktif dalam kondisi rendah
(low) dihubungkan dengan output dari 74LS138 yaitu
Y5. Gambar 3.8 menunjukkan hubungan antara 8031
dengan PPI 8255, serta tabel 3.3
------------------------1------------------------QTJ------------------O' CO NPfr IT*- W H * ii2_
c e>v p P O . O PO. 1
X I P O . 2
P 0 . 3 P O . 4
X 2 P O . S
P 0 . 6 P O . 7 R E S E T
P 2 .0 P 2 . 1
I N T O P 2 . 2
I H T 1 P 2 . 3
T O P 2 . 4
T 1 P 2 . S
P 2 . 6
P l . O P 2 . 7
PI. 1 P I . 2 P I - 3
P I . 4 P S E N
A L E y p P i . S
P I . 6 T X O
P I . 7 R X D
8 0 3 1
.SET
E ieS K IZ E E S E O - IbAftl SETRgBEff>-
1
H±=
5 5 5 5 "
GAMBAR 3.8
HUBUNGAN 8031 DENGAN PPI 8255
menunjukkan alamat dari masing-masing port. Dalam perencanaan ini masing-masing port digunakan sebagai berikut :
Port A sebagai input Port B sebagai output
Port C bawah sebagai output Port C atas sebagai output
Format untuk mengatur semua port dari 82 55 sesuai
dengan yang diinginkan digunakan kontrol word yaitu
90H .
TABEL3.2
TABEL ALAMAT PORT DARI 8255
A15 AM A13 A12 All AiO A9 A8 .... A3 A2 A1 AO ALAMAT PORT 0 0 1 1 1 0 0 0 .... .... 0 0 0 0 2800H PORT A 0 0 1 1 1 0 0 .... 0 0 0 1 2801H PORT B 0 0 1 1 1 0 0 0 .... .... 0 0 1 0 2802H PORT C 0 0 1 1 1 0 0 0 .... .... 0 0 1 1 2803H C.PORT
2.6 Rangkaian Display..
Pada perencanaan ini digunakan 4 buah seven segmen
commond anoda, 1 buah IC 74LS247 dan IC ULN2003A
sebagai pengatur seven segment. Dan untuk driver
seven segmen itu digunakan transistor P N P . Gambar
3.9 menunjukkan rangkaian lengkap display. IC
74LS247 mempunyai 4 buah input yaitu pada pin
8, 4, 2 dan 1. Input untuk IC 74LS247 yang
dihubungkan dengan PC3, PC2, PCI dan PCO dari
port C 8255, untuk IC ULN 2003A inputnya 7B, 6B,
5B, 4B, 3B, 2B, IB dihubungkan dengan PB7, PB6, PB5, P B 4 , PB3, PB2, dan PB1 dari port B 8255.
GAMBAR 3.9
RANGKAIAN LENGKAP DISPLAY
Serta semua outputnya dari 74LS247 yaitu a, b, c, d, e, f dan g dihubungkan dengan seven segment
kedua, ketiga dan keempat.
Semua sinyal kontrol dari 74LS247 yaitu RBI, BI/RBO
dan LT dihubungkan dengan Vcc, dimana semua
outputnya aktif dalam kondisi LOW (rendah) hal ini
karena RBI, BI/RBO akan mematikan 7 segmen bila
diberi logika LOW. Output dari ULN2003A 1C, 2C, 3C, 4C, 5C, 6C dan 7C dihubungkan dengan seven segmen pertama yaitu segmen a, b, c, d, e, f dan g.
Untuk menjaga agar tidak terjadi tegangan lebih pada seven segment, maka pada output 74LS247 dan ULN2003A diberi tahanan. Dalam perhitungan seven segment dapat dianggap sebagai sebuah led.
Tegangan led yang dianggap ideal yaitu antara 2 Volt sehingga akan didapat nyala dari led yang cukup terang.
Dengan mengambil arus yang melewati led sebesar 20 mA, maka besar tahanan dapat dihitung sebagai berikut :
untuk Vied = 2 V
Vol dari 74LS247 = 0,5 V
Vcc - Vce(sat) - Vied - Vol R = --- =
lied
5 - 0,2 - 2 - 0,5
= --- -- u s Q 20 mA
Maka harga R(tahanan) yang diambil antara harga tersebut ada dipasaran yaitu sebesar 120 Q.
Pemilihan digit seven segmen kedua, ketiga, keempat
yang inputnya berasal dari PC7, PC6, PC5 dari
PPI 8255 dan untuk mendrive seven segmen pertama
yang inputnya berasal dari PB0 PPI 8255 menggunakan
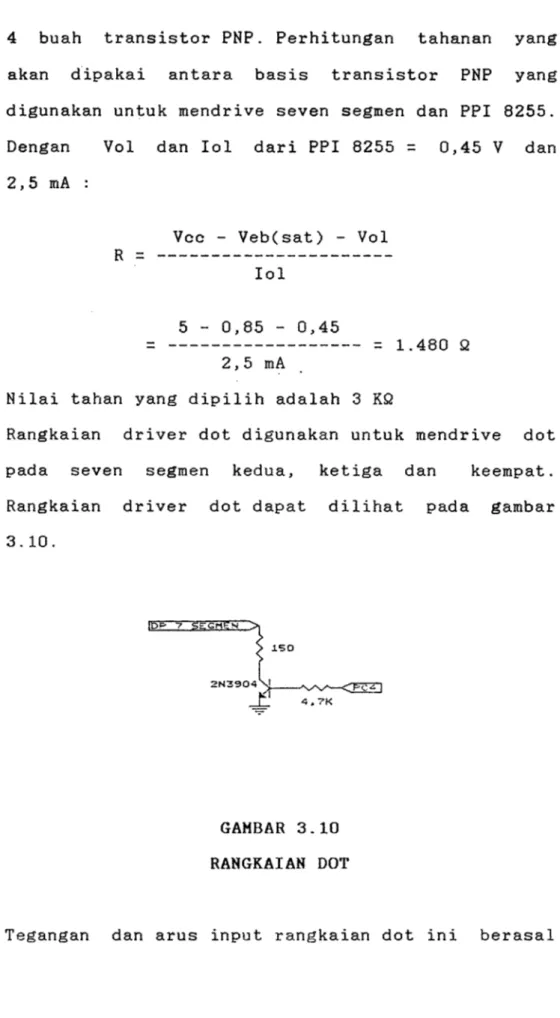
4 buah transistor P N P . Perhitungan tahanan yang akan dipakai antara basis transistor PNP yang digunakan untuk mendrive seven segmen dan PPI 8255.
Dengan Vol dan Iol dari PPI 8255 = 0,45 V dan 2,5 mA :
Vcc - Veb(sat) - Vol R = ---
Iol
5 - 0,85 - 0,45
= --- = 1 . 4 8 0 Q 2,5 mA
Nilai tahan yang dipilih adalah 3 KQ
Rangkaian driver dot digunakan untuk mendrive dot pada seven segmen kedua, ketiga dan keempat.
Rangkaian driver dot dapat dilihat pada gambar 3. 10.
GAMBAR 3.10 RANGKAIAN DOT
Tegangan dan arus input rangkaian dot ini berasal
dari PPI 8255 yaitu Voh = 2,4 V dan Ioh = 400
jjlAmaka nilai tahanan
Voh - Vbe(sat) 2,4 - 0,85
Rb = --- = ---= 4.625 Q
Ioh 400 nA
Tahanan Rb dipilih sebesar 4,7 KQ
Sedangkan Vcc = 5 V, Vied = 2 V, dan lied = 20 mA maka nilai Rc :
Vcc - Vied - 2 x Vce(sat) 5 - 2 - 0,4 Rc = --- = ---
lied 20 mA
= 130 Q
Tahanan Rc yang dipilih adalah 150 Q
2.7 Transduser Eanas. Tubuh. Dan. Rangkaian Penguatnya
Pada, perencanaan ini dipilih transduser/sensor
panas type LM 335. Dipilihnya sensor ini karena
output yang dihasilkan linier yang berarti
pertambahan panas sebanding dengan perubahan
output dari sensor. Jangkauan dari sensor ini dari
suhu -40 °C sampai 100 °C. Transduser ini mempunyai
ketelitian 10 mV/°K atau terjadi kenaikan tegangan
10 mV tiap kenaikan suhu 1 °C.
LM335
Rbias :>•
GAMBAR 3.11
RANGKAIAN TRANSDUSER PANAS TUBUH
Tahanan bias pada rangkaian transduser untuk panas tubuh ditentukan suhu nominal 20 °C dan arus yang mengalir 1 mA :
Vz = 2,73 + (10 m V / ° C ) x T
= 2,73 + (10 m V / ° C ) x 20
= 2,93 Volt
Vcc - Vz 5 - 2 , 9 3
Rbias = --- = --- = 2.070 Q 1 mA 1 mA
Tahanan bias (Rbias) yang dipilih 2 K Q .
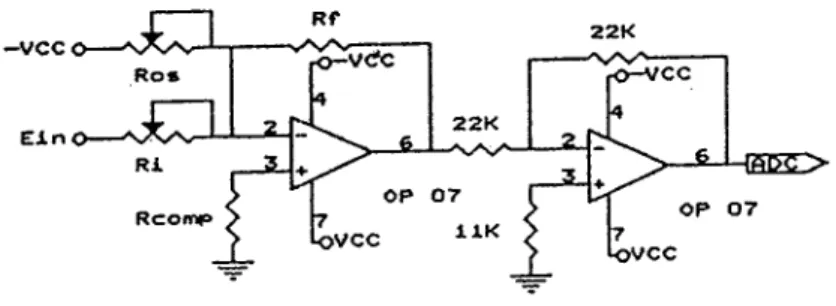
Rangkaian penguat yang digunakan adalah jenis zero
and span converter terdiri dari rangkaian pengikut
tegangan dan rangkaian penguat. Rangkaian pengikut
tegangan mempunyai penguat sebesar 1, digunakan
rangkaian pengikut tegangan agar tegangan output
dari rangkaian penguat sama dengan tegangan input.
Dan tahanan masukan (Zi) yang tinggi sehingga arus dari sumber dapat diabaikan.
Op-Amp yang digunakan untuk rangkaian pengikut tegangan dan rangkaian penguat adalah OP-07 dengan suplai antara ± 3 sampai ± 18 Volt. Dan mempunyai tegangan offset yang rendah.
Operational Amplifier yang ketiga berupa penguatan pembalik. Op-Amp yang ketiga berfungsi untuk membalik polaritas agar sesuai dengan tegangan masukan dan mempunyai penguatan s a t u . Karena tegangan masukan yang didapat dari tranduser suhu tubuh dalam orde milivolt maka tegangan ini perlu dikuatkan sehingga dapat terukur oleh ADC.
Dimana tegangan referensi dari ADC adalah 5 V dan keluaran digital untuk tegangan masukan yang sama adalah 1111 1111 yang berarti kenaikan setiap bit
rO—VCC
4
lovcc7
GAMBAR 3.12
RANGKAIAN PENGIKUT TEGANGAN
adalah 20 mV.
Karena suhu tubuh inanusia hanya berkisar antara 35 °C sampai 42 °C maka perhitungan untuk rangkaian penguat dilakukan pada range tersebut.
untuk 35 °C
Vz = 2,73 + (10 mV/°K) x 35 °C = 3,08 V untuk 42 °C
Vz = 2,73 + (10 mV/°K) x 42 °C = 3,15 V
data dari ADC untuk tegangan dari 3,08 sampai 3,15 diinginkan dari 0 sampai 1,4 Volt
Vout(max) - Vout(min) 1,4 - 0 Vin(max) - Vin(min) 3,15 - 3,08
=
20
Rf m = ----
Ri untuk Rf = 20 KQ maka Ri = 1 KQ
Ri dipilih tahanan variabel 2 K2 Vout = m Vin + b
Pada Vin = 3,08 Volt, Vout = 0 Volt 0 = 20 x 3,08 + b
b = -61,6 Rf b = ----(V)
Ros
Untuk tegangan negatif V = - 5 Volt
(20 K Q )(- 5 V) Ros = ---
- 61,6
= 1,623 KQ
Tahanan Ros dipilih tahanan variabel 2 KQ Rcomp = Rf // R i '// Ros
= 20 K // I K / / 1,623 K
= 620 Q
Tahanan Rcomp dipilih 560 Q
Nilai tahanan yang diperoleh dikalikan sepuluh agar memperkecil arus yang memasuki IC QP-07.
- v c c o—
Elr>0— ^Xs^
E E >
O P 0 7
GAMBAR 3.1315) RANGKAIAN ZERO AND SPAN
2.8 Transduser Detak Jantung Dan.
Pada perencanaan ini dipilih transduser atau sensor untuk cahaya Light Dependent Resistor (LDR).
Output tegangan yang dihasilkan dalam milivolt sehingga perlu dikuatkan. Untuk rangkaian penguat
Prentice Hall, Industrial Control Electronic, tel 214,
ini digunakan IC LM3900. Dan sebagai comparator digunakan IC LM741.
Rangkaian IC1 dan IC2 digunakan untuk menyetabilkan perubahan ketembusan cahaya yang dapat dideteksi oleh LDR. Apabila terjadi denyutan jantung maka ada aliran darah yang melewati jari tangan yang menyebabkan intensitas cahaya yang melewati jari mengecil, hal ini menyebabkan tahanan dari LDR merabesar sehingga arus yang melewati akan berkurang. Hal ini mengakibatkan input negatif dari IC1 lebih kecil arusnya dari input positif hal ini mengakibatkan output dari IC1 bertambah dan akan mengisi Cl. = 1 nF sehingga output dari IC2 negatif dan menyebabkan input positif dari IC1 arusnya akan lebih negatif dari input negatif sampai pulse selanjutnya terukur. Disini Cl dan C2 = 1
m.F akan bergantian mengisi dan dikosongkan. R2 dan R3 dipilih 1 MQ dan R1 = 2,2 M Q .
IC3 berfungsi sebagai penguat membalik C3 berfungsi untuk memblok sinyal DC. Pemilihan C3 bila frekuensi terendah dipilih 0,2 Hz :
1 1
C3 = --- = --- = 36 uF 2icfR4 2 x
kx 0,2 x 22K
C3 dipilih 33 uF
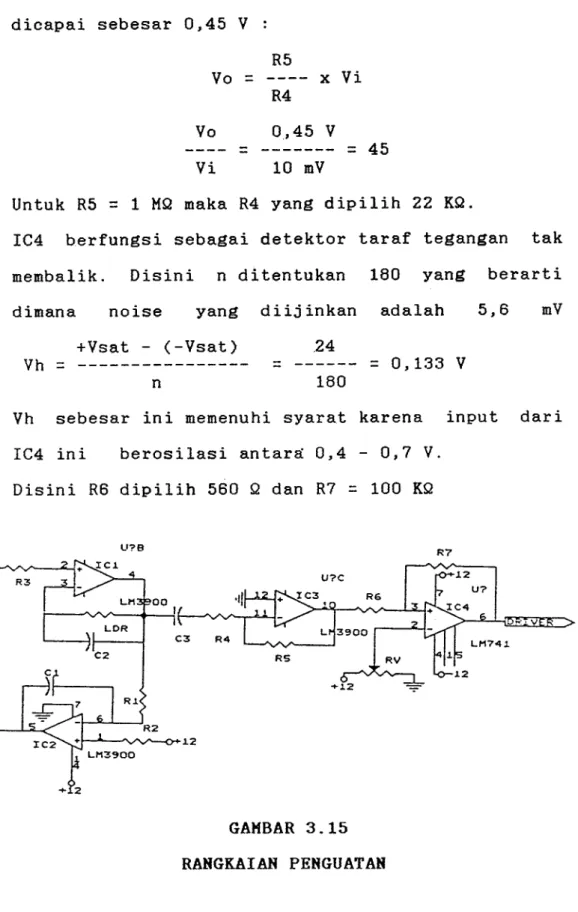
Untuk V input sebesar 10 mV dan V output yang ingin
dicapai sebesar 0,45 V : R5
Vo = ----x Vi R4
= 45 Vo 0,45 V Vi 10 mV
Untuk R5 = 1 MQ maka R4 yang dipilih 22 KQ.
IC4 berfungsi sebagai detektor taraf tegangan tak membalik. Disini n ditentukan 180 yang berarti dimana noise yang diijinkan adalah 5,6 mV
+Vsat - (-Vsat) 24
n 180
0,133 V
Vh sebesar ini memenuhi syarat karena input dari IC4 ini berosilasi antarai 0,4 - 0,7 V.
Disini R6 dipilih 560 2 dan R7 = 100 KQ
U ? B
R 7
L M 7 4 i
GAMBAR 3.15
RANGKAIAN PENGUATAN
2SC1815. Transistor pertama selain untuk memperoleh tegangan + 5 V yang merupakan masukan dari TO IC 8031 juga untuk mendrive led dan buzzer.
R8 dan RIO dipilih 10 KQ, R9 = 4,7 KS2. Untuk Vied 2 V dan lied 20 mA
Vcc - Vied 1 2 - 2
R 11 = --- = --- = 500 Q
lied 20 mA
Rll dipilih 560 Q
GAMBAR 3.16 RANGKAIAN DRIVER
Dalam perencanaan rangkaian ADC ini digunakan IC
ADC dengan tipe ADC0808 dimana IC ini mengubah
besaran analog ke digital 8 bit succesive
approximation dengan waktu konversi 100 usee dengan
waktu yang secepat ini cukup untuk dapat
mengkonversikan besaran analog.
Pin AO, pin A1 dan pin A2 diberi logika "0” dengan jalan menground ketiga pin tersebut dengan demikian maka input yang dipakai adalah INO.
GAMBAR 3.1716>
RANGKAIAN ADC
Jalur data bus pada ADC0808 ini dihubungkan dengan port A dari PPI 8255. Gambar rangkaian ADC ini dapat dilihat pada gambar 3.1^. Pin E O C , pin OE, dan pin Start/ALE dihubungkan dengan pin PI.3, pin PI.4, pin PI.5 dari 8031.
^ PT Grassdia, Data Sheet Book 3, hal 45,
X2 P 0.5 P0.6 PO • 7 RESET
P2.0 P2 . i
INTO P2.2
INT 1 P2.3
TO P2 • 4
Ti P 2.5
P2.6 PJL.O P 2.7 Pi . i
Pi . 2 Pi.3
Pi . 4 PSEN
ALE/r Pi.5
Pi . 6 TXO
Pi. 7 RXO
m
A YO
B Yi
C Y2
Y3 Y4
Ci Y5
C2A Y6
C2B Y7
- <7 . t » a m i n >
G A M B A R 3.18
MINIMUM SISTEM SECARA LENGKAP
cncn
3. PERENCANAAN PERANGKAT LUNAK
Seperti telah diuraikan di atas bahwa pengaturan pengukur detak jantung dan panas tubuh dilakukan oleh minimum sistem 8031. Dalam hal ini digunakan sebuah program dengan menggunakan bahasa mesin dari mikrokontroler 8031 untuk mengendalikan semua perangkat keras yang telah d i r e n c a n a k a n .
Pertama-tama dilakukan inisialisasi 8255, inisialisasi interrupt enable. Dan inisialisasi register yang digunakan untuk suhu atau detak jantung. Kemudian port
1 dari 8031 dibaca untuk memilih proses pengukuran yang diinginkan. Diagram alir untuk pembuatan perangkat
lunak dapat dilihat pada gambar 3.19 dan gambar 3.20.
Prinsip pengukuran untuk detak jantung adalah dengan menghitung waktu timbulnya satu pulsa yang terdeteksi.
Dan waktu yang diperoleh diubah kefrekuensi pulsa selama satu menit.
Prinsip pengukuran panas adalah dengan mendeteksi
output dari ADC dan hasil dikonfersikan sehingga
kenaikan satu bit yang terdeteksi menyebabkan kenaikan
0,1 ° C .
GAMBAR 3.19
FLOWCHART ALAT MONITOR DETAK JANTUNG DAN TEMPERATUR TUBUH
GAMBAR 3.20
FLOWCAHART ALAT MONITOR DETAK JANTUNG DAN TEMPERATUR TUBUH
PORT_A EQU 2800H
PORT B EQU
PORT_C EQU
CWR EQU
HURUF_P EQU
HURUF_S EQU
9