BAB 2
LANDASAN TEORI
Landasan teori sangat membantu ntuk dapat memahami suatu sistem. Selain daari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu sistem. Dengan pertimbangan hal-hal
tersebut, maka landasan teori merupakan bagian yang harus dipahami untuk pembahasan selanjutnya. Pengetahuan yang mendukung perencanaan dan realisasi alat meliputi mikrokontroler Arduino uno, sensor cahaya LDR, LCD dan program.
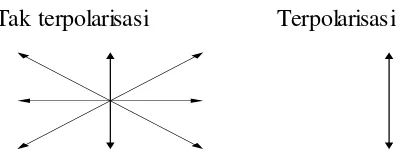
Cahaya adalah suatu bentuk pancaran energi yang mana mempunyai kapasitas arau kemampuan untuk merangsag sensasi penglihatan. Cahaya dari kebanyakan sumber adalah tidak terpolarisasi yang berarti bahwa arah dari medan –E dan medan –B adalah acak, bahkan ketika cahaya bergerak dalam arah yang sama. Pada cahaya yang terpolarisasi, gelombang cahayanya mempunyai medan listrik dan medan magnetik yang bersekutu (gambar 2.1).
Salah satu dari sekian banyak cara agar cahaya menjadi terpolarisasi adalah dengan menembus sebuah filter polarisasi. Filter polarisasi merupakan lembaran-lembaran plastik dengan berjuta-juta molekul memanjang linear yang bersekutu. Apabila cahaya menembus filter polarisasi, gelombang-gelombang cahaya yang medan listriknya sejajar terhadap molekul-molekul tersebutt membentuk arus di dalam molekul dan kemudian diserap. Gelombang-gelombang cahaya yang medan listriknya tegak lurus terhadap molekul- molekul tersebut tidak diserap.
Tak terpolarisasi Terpolarisasi
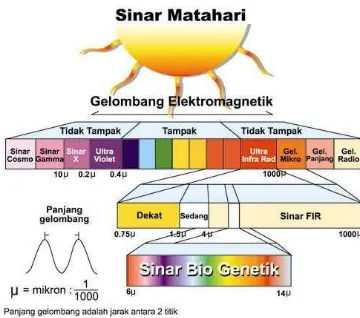
Cahaya merupakan gelombang elektromagnetik yang dapat dilihat dengan mata. Suatu sumber cahaya memancarkan energy, sebagaian dari energy ini diubah menjadi cahaya tampak. Perambatan cahaya di ruang bebas dilakukan oleh gelombang elektromagnetik.
Kecepatan rambat ( v ) gelombang elektromagnetik di ruang bebas sama dengan 3 x 108 meter per detik. Jika frekuensi (f) dan panjang gelombang �, maka berlaku :
………….(2.1)
Dimana � adalah panjang gelombang, dengan satuan meter (m)
v adalah kecepatan cahaya, dengan satuan meter per detik (m/s) f adalah frekunsi, dengan satuan hertz ( Hz )
Panjang gelombang cahaya tampak berkisar antara 350 namometer ( nm ) hingga 790 nanometer ( nm ). Yang terdiri atas beberapa daerah warna seperti yang terlihat pada gambar 2.2 berikut ini :
Gambar 2.2 Warna-warna spektrum
Cahaya putih dapat diuraikan menggunakan prisma kaca, sinar-sinarnya dibiaskan sedemikian rupa sehingga terjadi suatu spektrum. Warna-warna
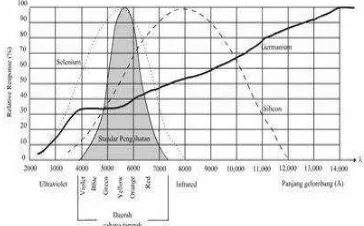
Selain memiliki warna tertentu, setiap panjang gelombang juga memiliki intensitas. Mata manusia paling peka cahaya dengan panjang gelombang 555 nm, yaitu cahaya berwarna kuning- hijau. Warna- warna yang lain dengan intensitas yang sama lebih redup, seperti yang terlihat pada grafik kepekaan mata gambar 2.3 berikut ini.
Gambar 2.3 Grafik Kepekaan Mata
2.1.LIGHT DEPENDENT RESISTOR ( LDR )
Sebuah light dependent resistor ( LDR ) terdiri dari sebuah piringan bahan semikonduktor dengan dua buah elektroda pada perumukaannya. Biasanya LDR terbuat dari bahan CdS, CdSe, PbS, dan Bi2Se3. Gambar 2.4 menunjukan salah satu bentuk LDR.
Gambar 2.4 Bentuk dan Simbol LDR
bersifat sebagai konduktor yang buruk untuk mengalirkan arus listrik. Dengan kata lain, nilai tahanan bahan sangat tinggi.
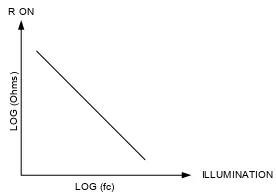
Dibawah cahaya yang terang, lebih banyak elektron dapat melepaskan dari atom-atom bahan semikonduktor ini. Terdapat lebih banyak elektron bebas yang mengalirkan muatan listrik. Hal ini disebabkan adanya efek foto elektrik yaitu fenomena quantum elektron dimana elektron-elektron dipancarkan atau dilepas oleh suatu bahan setelah menyerap energi dari radiasi gelombang elektromagnetik seperti sinar X atau cahaya tampak. Dalam keadaan ini, bahan bersifat sebagai konduktor yang baik. Tahanan listrik bahan rendah. Semakin terang cahaya yang mengenai bahan, semakin banyak electron bebas yang tersedia, dan semakin rendah pula tahanan listrik bahan. Gambar 2.5 menunjukan grafik hubungan antara intensitas cahaya terhadap resistansi LDR.
Gambar 2.5 Grafik Iluminasi Cahaya
2.1.1. Sensitifitas
Gambar 2.6 Geometri Elektroda Permukaan LDR
Pada gambar 2.6 diatas bahwa bagian yang sensitif terhadap perubahan cahaya, dibentuk dalam struktur yang berliku- liku, hal ini dimaksudkan agar resolusi tahananya dapat sekecil mungkin.
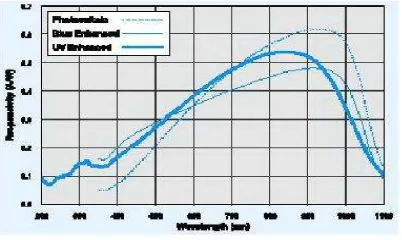
2.1.2. Spektrum Respons
Seperti halnya mata manusia, sensitivitas LDR juga tergantung dari panjang gelombang cahaya yang mengenainya. Masing-masing jenis material bahan semikonduktor LDR mempunyai grafik spektrum respons sendiri. Gambar 2.7 menunjukan grafik respons suatu jenis LDR yang banyak dipasaran terhadap spektrum panjang gelombang cahaya.
Gambar 2.7 Grafik Respon LDR
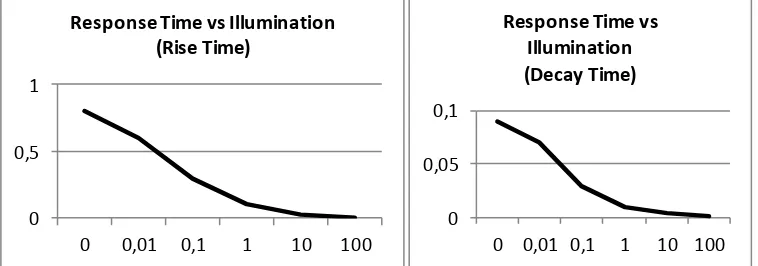
2.1.3. Kecepatan Respons
diperlukan konduktansi cahaya pada LDR untuk mencapai 1 – e-1 ( sekitar 63 % ) dari nilai akhirnya. Waktu turun didefinisikan sebagai waktu yang
diperlukan konduktansi cahaya pada LDR untuk menurun sampai e-1 ( sekitar 37 % ) dari keadaan teriluminasi, dimana e adalah bilangan Euler yang besarnya 2,718. Pada 1 fc ( footcandela) iluminasi, waktu respons sekitar 5 msec sampai 100 msec.
Untuk kerja kecepatan respons suatu LDR berkaian dengan sifat dari bahan semikonduktor pembentuknya, yaitu sifat carrier lifetime bahan
semikonduktor. Pada beberapa semikonduktor, hole-electron berpasang-pasangan pada suatu suhu ruangan. Pembuatan electron dan hole pada bahan semikonduktor akan memerlukan energi. Ketika electron terbentuk maka hole pun akan
terbentuk. Energi untuk membangkitkan terbentuknya electron dan hole tersebut dapat berupa energi panas ataupun energi yang dihasilkan dari cahaya yang mengenai bahan semikonduktor tersebut. Pengukuran lamanya waktu untuk berekombinasi kembali antara hole dan electron seperti keadaan sebelumnya setelah energi pembangkitnya hilang dinamakan carrier lifetime.
Gambar 2.8 Grafik Respons Waktu
Kecepatan respons juga dipengaruhi oleh terang redupnya cahaya. Semua jenis material LDR menunjukan kecepatan responsnya lebih tinggi saat level
cahaya lebih terang dan kecepatan lebih rendah saat cahaya lebih redup.
Penyimpanan LDR di ruang yang gelap akan menyebabkan respons lebih lambat dari pada penyimpanan diruang yang terang.
2.3 Mikrokontroler Arduino UNO
Untuk memahami Arduino, terlebih dahulu kita harus memahami terlebih dahulu apa yang dimaksud dengan physical computing. Physical computing adalah membuat sebuah sistem atau perangkat fisik dengan menggunakan software dan hardware yang sifatnya interaktif yaitu dapat menerima rangsangan dari lingkungan dan merespon balik. Physical computing adalah sebuah konsep untuk memahami hubungan yang manusiawi antara lingkungan yang sifat alaminya adalah analog dengan dunia digital.
Pada prakteknya konsep ini diaplikasikan dalam desain- desain alat atau projek-projek yang menggunakan sensor dan microcontroller untuk menerjemahkan input analog ke dalam sistem software untuk mengontrol gerakan alat-alat elektro-mekanik seperti lampu, motor dan sebagainya.
Pembuatan prototype atau prototyping adalah kegiatan yang sangat penting di dalam proses physical computing karena pada tahap inilah seorang perancang melakukan eksperimen dan uji coba dari berbagai jenis komponen, ukuran, parameter, program komputer dan sebagainya berulang-ulang kali sampai diperoleh kombinasi yang paling tepat.
Dalam hal ini perhitungan angka-angka dan rumus yang akurat bukanlah satu-satunya faktor yang menjadi kunci sukses di dalam mendesain sebuah alat karena ada banyak faktor eksternal yang turut berperan, sehingga proses mencoba dan menemukan/mengoreksi kesalahan perlu melibatkan hal-hal yang sifatnya non-eksakta. Prototyping adalah gabungan antara akurasi perhitungan dan seni.
berarti. Dengan demikian harus ada sebuah alat pengembangan yang membuat proses prototyping menjadi mudah.
Pada masa lalu (dan masih terjadi hingga hari ini) bekerja dengan hardware berarti membuat rangkaian menggunakan berbagai komponen elektronik seperti resistor, kapasitor, transistor dan sebagainya. Setiap komponen disambungkan secara fisik dengan kabel atau jalur tembaga yang disebut dengan istilah “ hard wired ” sehingga untuk merubah rangkaian maka sambungan- sambungan itu harus diputuskan dan disambung kembali.
Dengan hadirnya teknologi digital dan microprocessor fungsi yang sebelumnya dilakukan dengan hired wired digantikan dengan program-program software. Ini adalah sebuah revolusi di dalam proses prototyping. Software lebih mudah diubah dibandingkan hardware, dengan beberapa penekanan tombol kita dapat merubah logika alat secara radikal dan mencoba versi ke-dua, ke-tiga dan seterusnya dengan cepat tanpa harus mengubah pengkabelan dari rangkaian.
Arduino Uno adalah board mikrokontroler berbasis ATMEGA 328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.:
Uno berbeda dari semua papan sebelumnya dalam hal itu tidak menggunakan FTDI chip driver USB-to-serial. Sebaliknya, fitur Atmega16U2 (Atmega8U2 hingga versi R2) diprogram sebagai konverter USB-to-serial.Revisi 2 dari dewan Uno memiliki resistor menarik garis 8U2 HWB ke tanah, sehingga lebih mudah untuk dimasukkan ke dalam mode DFU.
Tabel 1. Ringkasan Arduino UNO
Microcontroller ATmega328
Operating Voltage 5V
(recommended)
Input Voltage (limits) 6-20V
Digital I/O Pins 14 (of which 6 provide PWM output) Analog Input Pins 6
DC Current per I/O Pin 40 Ma DC Current for 3.3V Pin 50 Ma
Flash Memory 32 KB (ATmega328) of which 0.5 KB used by bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
Length 68.6 mm
Width 53.4 mm
Weight 25
1. Power
Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan satu daya eksternal. Sumber daya dipilih secara otomatis.Eksternal (non-USB) dapat di ambil baik berasal dari AC ke adaptor DC atau baterai. Adaptor ini dapat dihubungkan dengan menancapkan plug jack pusat-positif ukuran 2.1mm konektor POWER. Ujung kepala dari baterai dapat dimasukkan kedalam Gnd dan Vin pin header dari konektor POWER.Kisaran kebutuhan daya yang disarankan untuk board Uno adalah7 sampai dengan 12 volt, jika diberi daya kurang dari 7 volt kemungkinan pin 5v Uno dapat beroperasi tetapi tidak stabil kemudian jikadiberi daya lebih dari 12V, regulator tegangan bisa panas dan dapat merusak board Uno.
Pin listrik adalah sebagai berikut:
lainnya3v3. Sebuah pasokan 3,3 volt dihasilkan oleh regulator on-board. GND. Ground pin.
2. Memori
ATmega328 memiliki 32 KB (dengan 0,5 KB digunakan untuk bootloader), 2 KB dari SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis dengan EEPROM liberary).
3. Input dan Output
Masing-masing dari 14 pin digital di Uno dapat digunakan sebagai input atau output, dengan menggunakan fungsi pinMode (), digitalWrite (), dan digitalRead (), beroperasi dengan daya 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor (secara default terputus) dari 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi khusus:
Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan dengan chip Serial ATmega8U2 USB-to-TTL.
Eksternal menyela: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interrupt pada nilai yang rendah, dengan batasan tepi naik atau turun, atau perubahan nilai. Lihat (attachInterrupt) fungsi untuk rincian lebih lanjut.
PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit dengan fungsi
analogWrite ().
SPI: 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI menggunakan SPI library.
LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin bernilai nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Uno memiliki 6 masukan analog, berlabel A0 sampai dengan A5, yang masing-masing menyediakan 10 bit dengan resolusi (yaitu 1024 nilai yang berbeda). Selain itu, beberapa pin memiliki fungsi khusus:
I2C: A4 (SDA) dan A5 (SCL). Dukungan I2C (TWI) komunikasi menggunakan perpustakaan Wire.
Reset. Bawa baris ini LOW untuk me-reset mikrokontroler.
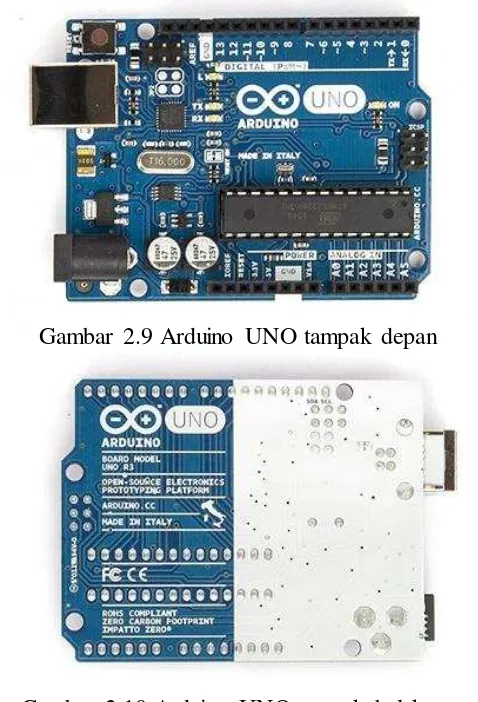
2.3.1 Arsitektur Mikrokontroler Arduino Uno
Gambar 2.9 Arduino UNO tampak depan
Gambar 2.10 Arduino UNO tampak belakang
Komponen utama di dalam papan Arduino adalah sebuah microcontroller 8 bit dengan merk ATmega yang dibuat oleh perusahaan Atmel Corporation . Berbagai papan Arduino menggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya, sebagai contoh Arduino Uno menggunakan ATmega328 sedangkan Arduino Mega 2560 yang lebih canggih menggunakan ATmega2560.
Blok-blok di atas dijelaskan sebagai berikut:
Universal Asynchronous Receiver/Transmitter (UART) adalah antar muka yang digunakan untuk komunikasi serial seperti pada 232, 422 dan RS-485.
2KB RAM pada memory kerja bersifat volatile (hilang saat daya dimatikan), digunakan oleh variable-variabel di dalam program.
32KB RAM flash memory bersifat non-volatile , digunakan untuk menyimpan program yang dimuat dari komputer. Selain program, flash memory juga menyimpan bootloader . UART (antar muka serial) 2KB RAM (memory kerja) 32KB RAM Flash memory (program)
1KB EEPROM CPU Port input/output
Bootloader adalah program inisiasi yang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan. Setelah bootloader selesai dijalankan, berikutnya program di dalam RAM akan dieksekusi.
1KB EEPROM bersifat non-volatile, digunakan untuk menyimpan data yang tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papan Arduino.
Central Processing Unit (CPU) , bagian dari microcontroller untuk menjalankan setiap instruksi dari program. Port input/output, pin-pin untuk menerima data (input) digital atau analog, dan mengeluarkan data (output) digital atau analog.
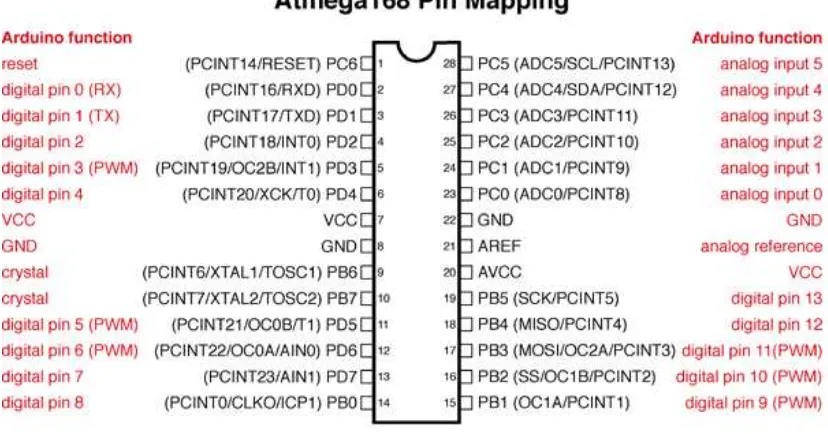
Setelah mengenal bagian-bagian utama dari microcontroller ATmega sebagai komponen utama, selanjutnya kita akan mengenal bagian-bagian dari papan Arduino itu sendiri.
Gambar 2.11 ATMega 168 pin mappping
2.1.2 Fitur ATMega8535
Berikut ini adalah fitur-fitur yang dimiliki oleh Aduino UNO.
1. Dua buah 8 bit counter/ timer dengan prescaler dan mode pembanding. 2. Satu buah 16 bit counter/ timer dengan prescaler, mode pembanding dan
mode capture. Real Time Counter dengan on-chip oscillator terpisah. 3. 4 kanal PWM
4. 8 kanal 10-bit ADC. 5. TWI.
6. Programmable serial USART. 7. Maser/ slave SPI.
8. Programmable Watchdog timer dengan on-chip oscillator terpisah. 9. Power-on reset dan programmable Brown-out detection.
13. 32 Programmable I/O.
14. Tegangan operasi 2.7 – 5.5 V.
15. Speed grades dengan range 0 – 16 MHz. 2.1.3 Komunikasi.
Arduino Uno memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lainnya. ATmega328 menyediakan UART TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan 1 (TX). Pada ATmega16U2 saluran komunikasi serial melalui USB dan muncul sebagai com port virtual untuk perangkat lunak pada komputer.
Firmware 16U2 menggunakan standar driver USB COM, dan tidak ada driver eksternal diperlukan. Namun, pada Windows, diperlukan file .inf. Perangkat lunak Arduino termasuk monitor serial yang memungkinkan data tekstual sederhana akan dikirim ke dan dari papan Arduino. RX dan TX LED di papan akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dan koneksi USB komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1).
The ATmega328 juga mendukung I2C (TWI) dan komunikasi SPI. Perangkat lunak Arduino termasuk perpustakaan Wire berfungsi menyederhanakan penggunaan bus I2C. Untuk komunikasi SPI, menggunakan perpustakaan SPI.Port A.
Merupakan 8-bit dua arah bi-directional port I/O,dengan menggunakan resistor pull-up internal dimana setiap pinnya dapat diatur per bit. Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga .selain itu arduino juga memliki kelebihan, sebagai berikut :
Tidak perlu perangkat chip programmer karena di dalamnya sudah ada bootloader yang akan menangani upload program dari komputer.
Bahasa pemrograman relatif mudah karena software Arduino dilengkapi dengan k
kumpulan library yang cukup lengkapi
2.4ANALOG TO DIGITAL CONVERTER ( ADC )
ADC adalah suatu alat yang mampu untuk mengubah sinyal atau tegangan analog menjadi informasi digital. Resolusi ADC selalu dinyatakan sebagai jumlah bit-bit dalam kode keluaran digitalnya. Misalnya, ADC dengan resolusi n-bit memiliki 2n kode digital yang mungkin dan berarti juga memiliki 2n step level. Jika resolusi ADC semakin tinggi, maka semakin banyak kemungkinan nilai-nilai analog yang bias disajikan. Misalnya ADC dengan resolusi 8 bit menghasilkan bilangan 0 sampai 255 ( 256 bilangan dan 255 step ), dengan demikian tidak mungkin menyajikan semua kemungkinan nilai-nilai analog. Jika sekarang resolusinya menjadi 10 bit maka akan menghasilkan bilangan 0 sampai dengan 1023 ( 1024 bilangan dan 1023 step ).
( )
(
)
Fitur- fitur pada arsitektur ADC mikrokntroler AVR adalah sebagai berikut :
Resolusi maksimum 10 bit (dapat dipilih resolusi 8 bit)
0,5 LSB Integral Non Linearity
Akurasi mutlak ± 2 LSB
Waktu konversi 13 – 260 µs
Pengambilan sampel sampai 15 kilo sampel per detik pada resolusi maksimum
8 kanal masukan single ended termultipleks
7 kanal masukan differensial dan 2 kanal masukan differential dengan opsi penguatan 10x dan 200x
Jangkauan tegangan masukan ADC 0 – VCC
Tegangan referensi 2,56 V internal yang dipilih
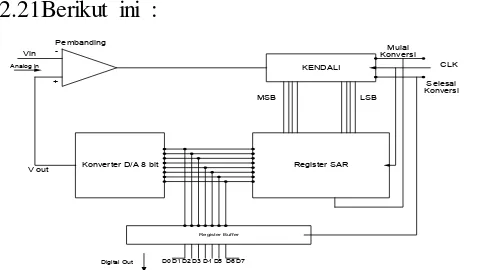
Ada banyak cara yang dapat digunnakan untuk mengubah sinyal analog menjadi sinyal digital yang nilainya proposional. Jenis ADC yang biasa digunakan.
dalam perancangan adalah jenis successive approximation convertion atau pendekatan bertingkat yang memiliki waktu konversi jauhlebih singkat dan tidak tergantung pada nilai masukan analognya atau sinyal yang akan diubah. Diagram blok pengubah sinyal analog ke dalam digital ditunjukkan pada gambar
2.21Berikut ini :
Prinsip kerja rangkaian pada gambar 2.21 tersebut adalah jika sinyal masukan mulai konversi dari unit kendali diberi logika „0‟ , maka register SAR
(Succesive Approximation Register) akan direset. Sehingga keluaran Vout unit DAC (Digital to Analog)menjadi nol. Pada waktu sinyal „mulai konversi‟
kembali menjadi tinggi, operasi konversi segera dimulai.
Pada pulsa clock berikutnya unit terkendali akan mengeset bit yang lebih rendah yaitu bit ke 7 register SAR. Kemudian data dikonversikan oleh unit DAC dan hasil konversi Vout dibandingkan dengan sinyal masukan Vin. Sinya hasil
perbandingan akan menentukan unit kendali untuk mengeset dan mereset register SAR. Demikian proses ini berlangsung sampai diperoleh nilai Vin sama dengan nilai Vout. Apabila konversi telah selesai, unit kendali mengirimkan sinyal „selesai konversi‟ yang berlogika rendah.
2.5. PEMROGRAMAN MIKROKONTROLER MENGGUNAKAN
CODE VISION AVR ( BAHASA C )
Penggunaan mikrokontroler yang diterapkan diberbagai rumah tangga,otomotif,sampai dengan kendali, membuat mikrokontroler mulai masuk didunia pendididkan. Banyak varian dan type dari mikrokontroler yang dipelajari dan digunakan di dunia pendidikan.
Akar dari bahas C adalah dari bahasa BCPL yang dikembangkan oleh Martin Richhards pada tahun 1967. Bahasa ini memberikan ide kepada Ken Thompson yang kemudian mengembangkan bahasa yang disebut dengan B pada tahun 1970. Perkembangan selanjutnya dari bahasa B adalah bahasa C oleh Dennis Ricthie sekitar 1970-an di Bell Telephone Laboratories Inc ( sekarang adalah AT & T Bell Laboratories ). Bahasa C pertama kali digunakan di computer Digital Equipment Corporation PDP-11 yang menggunakan sistem operasi UNIX.
C adalah bahasa yang standar, artinya satuan program yang ditulis dengan versi bahas C tertentu akan dapat dikoompilasi dengan versi bahasa C yang lain dengan sedikit modifikasi. Standar bahasa C yang asli adalah standar dari UNIX. Patokan standar UNIX ini diambil dari buku yang ditulis oleh Brian Kerninghan dan Dennis Ritehiie yang berjudul “The C Programming Language”,diterbitkan oleh Prentice Hall tahun 1978.
Beberapa alasan mengapa bahasa C banyak digunakan, diantaranya adalah sebagai berikut :
Bahasa C ini merupakan bahasa computer yang tersedia baik di computer mikro, mini maupun computer besar.
2. Kode bahasa C sifatnya portable.
Aplikasi yang ditulis dengan bahasa C untuk suatu computer tersebut dapat digunakan di computer lain hanya dengan modifikasi yang sedikit saja. 3. Bahasa C hanya menyediakan sedikit kata-kata kunci.
Semakin sedikit kata-kata kunci yang digunakan disuatu bahasa, semakin mudah bagi pemakai untuk mempelajari dan menggunkan bahasa tersebut. 4. Proses executable program bahasa C lebih cepat.
Karena philosopi dari bahasa C yang menyediakan sedikit kata-kata kunci, maka konsekuensinya program hasil dari kompilasi bahasa C relative akan lebih cepat prosesnya dibandingkan dengan hasil dari bahasa lain. 5. Dukungan pustaka yang banyak.
Telah disebut bahwa keandalan bahasa C dicapai dengan fungsi- fungsi pustakanya. Fungsi-fungsi pustaka ini disediakan oleh versi-versi bahasa C masing- masing atau dapat dibeli dari sumber yang lain.
6. C adalah bahasa yang tersruktur.
Bahasa C mempunyai struktur yang baik sehingga mudah untuk dipahami. C disebut bahasa yang terstruktur karena menggunakan fungsi-fungsi sebagai program-program bagiannya.
7. Selain bahasa tingkat tinggi, C juga dianggap sebagai bahasa tingkat menengah.
register, BIOS ( Basic Input Ouput System ), DOS ( Disk Operating System ) dan lain sebagainya.
8. Bahasa C adalah compiler.
Karena bahasa C sifatnya adalah compiler, maka akan menghasilkan executable program yang banyak dibutuhkan oleh program-program
komersial.
Ada beberapa program yang dapat digunakan sebagai editor dan compiler
untuk mikrokontroler AVR, salah satunya yaitu CodeVision. CodeVision AVR adalah salah satu alat bantu pemrograman yang bekerja dalam lingkungan pengembangan perangkat lunak yang terintegrasi. Code vision AVR ini
merupakan cross-compiler C, Integrated Development Environtment (IDE), dan
Automatic Program Generator yang didesain untuk mikrokontroler buatan Atmel seri AVR. Cross-compiler C mampu menerjemahkan hamper semua perintah dari bahasa ANSI C, sejauh yang diijinkan oleh arsitektur dari AVR, dengan tambahan beberapa fitur untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan dari sistem embedded.
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang mengizinkan anda untu menulis, dalam hitungan menit, semua instruksi yang diperlukan untuk membuat beberapa fungsi- fungsi tertentu. Dengan fasilitas ini mempermudah para Programmer pemula untuk belajar pemograman mikrokontroler menggunakan CVAVR. Seperti aplikasi IDE
lainnya, CodeVision AVR dilengkapi dengan source code editor, compiler, linker,
dan dapat memanggil Atmel AVR Studio untuk debugger nya.
Untuk memulai menjalankan CodeVision, buka program CodeVision melalui menu Start|All Program||CodeVision|CodeVision AVR C Compiler
Gambar 2. 13 Tampilan Pertama Kali CodeVision dijalankan
2.6. SOFTWARE DESAIN PCB ( Printed Circuit Board ) Proteus
Profesional 7.7 SP2 Pro
Proteus professional merupakan kelompok software yang digunakan untuk membantu para desainer dalam merancang dan mensimulasikan suatu rangkaian elektronika. Software ini memiliki dua fungsi sekaligus dalam satu paket, paket yang pertama sebagai software untuk menggambar skematik dan dapat
disimulasikan yang diberi nama ISIS. Paket kedua digunakan sebagai merancang gambar Printed Circuits Board (PCB) yang diberi nama ARES. Secara langsung, pengubahan dari skematik ke PCB dapat dilakukan dalam software Proteus Prof 7.7 ini.
programmable (mikrokontroler) dan IC memory. Selain diidukung dengan kelengkapan komponen, juga didukung.
2.6.1. Fungsi Tiap Fitur Proteus Prof 7.7
Tampilan window Proteus Profesional ISIS 7 seperti dibawah ini, dan memiliki fungsi difitur-fitur nya yang sering digunakan sebagai berikut :
Gambar 2.14 Tampilan window Proteus Profesional 7.7
Tabel 2.3 Nama-Nama Fitur Proteus Profesional dan Kegunaannya Tabel 2.3 Nama-Nama Fitur Proteus Profesional dan Kegunaannya
Nama Fitur Kegunaan
Menu Bar
Merupakan list menu yang dapat digunakan dalam perancangan atau pengolahan gambar rangkaian.
Open Save Data New File
Open File
Save
Membuat file baru dengan area gambar baru.
Membuka file yang pernah disimpan. Manyimpan file yang telah dibuat.
Togle Grid Menampilkan bantuan titik-titik
panduan pada area gambar.
Center at Cursor
Zoom in
Zoom out
Zoom to view sheet
Zoom to area
Membuat area tengah tampilan gambar dengan bertumpu pada cursor. Memperbesar gambar.
Memperkecil gambar.
Menampilkan keseluruhan gambar dalam layar monitor.
Memperbesar gambar dengan memilih area yang dikehendaki.
Mini view Menampilkan gambar dalam bentuk
tampilan kecil seluruh area gambar.
Component List Daftar komponen yang telah diambil
dari library.
Pick From Library
Mengambil komponen pada library yang akan diletakkan pada component list. terminal yang dibutuhkan dalam rangkaian (VCC,Gnd,Input,Output). Memilih pembangkit pulsa yang akan digunakan.