RANCANG BANGUN PEMODELAN
PESAWAT ROLLER MIXER
BERBASIS MIKROKONTROLER AT89C51
Buku Tugas Akhir Ini Diajukan Untuk Melengkapi Sebagian Persyaratan Menjadi Ahli Madya teknik Elektromedik
OLEH
ALWI HASBULLAH P2 31 380 04 008
JURUSAN TEKNIK ELEKTROMEDIK
POLITEKNIK KESEHATAN JAKARTA II2007
PERNYATAAN KEASLIAN BUKU TUGAS AKHIR
Saya menyatakan dengan sesungguhnya bahwa buku tugas akhir dengan judul :
Rancang Bangun Pemodelan Pesawat Roller Mixer Berbasis Mikrokontroler AT89C51
yang dibuat untuk melengkapi sebagian persyaratan menjadi Ahli Madya Teknik Elektromedik pada jurusan Teknik Elektromedik Politeknik Kesehatan Jakarta II, sejauh yang saya ketahui bukan merupakan tiruan atau duplikasi dari buku tugas akhir yang sudah dipublikasikan dan atau pernah dipakai untuk mendapatkan jenjang diploma di lingkungan Politeknik Kesehatan Jakarta II, maupun Perguruan Tinggi atau instansi manapun, kecuali bagian yang sumber informasinya dicantumkan sebagai mana mestinya.
Jakarta,6 Agustus 2007
Alwi Hasbullah P2 31 380 04 008
PERSETUJUAN
Buku tugas akhir dengan judul :
Rancang Bangun Pemodelan Pesawat Roller Mixer Berbasis Mikrokontroler AT89C51
dibuat oleh Alwi Hasbullah (P2 31 380 04 008) untuk melengkapi sebagian persyaratan menjadi Ahli Madya Teknik Elektromedik pada Jurusan Teknik Elektromedik Politeknik Kesehatan Jakarta II dan disetujui untuk diajukan dalam sidang ujian akhir program.
Jakarta,6 Agustus 2007
Drs. Adisman, BE
Nip. 140 157 513PENGESAHAN
KETUA JURUSAN TEKNIK ELEKTROMEDIK POLITEKNIK KESEHATAN JAKARTA II
DEPARTEMEN KESEHATAN REPUBLIK INDONESIA
DR. IR. Hj. RUSMINI B. AIM. MM Nip. 140.074.041
KATA PENGANTAR
ﻥﻣﺤﺮﻟﺍ ﷲﺍ ﻡﺳﺒ
ﻡﻳﺤﺭﻟﺍ
Puji dan syukur penulis panjatkan kehadirat ALLAH SWT yang telah melimpahkan hidayah serta karunia-NYA, sehingga penulis dapat menyelesaikan pembuatan modul dan menyelesaikan penyusunan karya tulis ini. Yang mana karya tulis ini merupakan syarat untuk menyelesaikan pendidikan Diploma III Politeknik Kesehatan Jakarta II Jurusan Teknik Elektromedik.
Adapun judul karya tulis yang penulis buat adalah :
” RANCANG BANGUN PEMODELAN PESAWAT ROLLER MIXER BERBASIS MIKROKONTROLER AT89C51 ”
Pada kesempatan ini penulis tidak lupa mengucapkan terima kasih kepada
semua pihak yang telah membantu penulis selama pembuatan modul dan penyusunan karya tulis ini, terutama penulis tujukan kepada :
1. Kedua orang tua dan adik-adikku tercinta, yang telah begitu banyak memberikan dorongan baik berupa moril, materil dan doa.
2. Ibu DR. IR. Hj. Rusmini.B. AIM. MM selaku Ketua Jurusan Teknik Elektromedik.
3. Bapak Drs. Adisman, BE selaku pembimbing modul.
4. Keluarga besar MELPA yang tidak bisa penulis sebutkan satu persatu. 5. Angkatan 2003 terutama Fajri dan Iwan yang banyak membantu penulis. 6. Lilik dan Suli dari Farmasi yang telah meminjamkan buku.
Semoga Allah SWT membalas jasa dan kebaikan yang telah diberikan kepada penulis, sebagai manusia biasa yang tidak luput dari kesalahan dan kekurangan, penulis sangat mengharapkan kritik dan saran yang membangun.
Akhirnya penulis berharap semoga karya tulis ilmiah ini dapat bermanfaat bagi kita semua.
Jakarta, Agustus 2006
Penulis
ABSTRAK
ALWI HASBULLAH,”Rancang Bangun Pemodelan Pesawat Roller Mixer Berbasis Mikrokontroler AT89C51”, dibawah bimbingan Drs. Adisman, BE, 2007 , 56 halaman + 20 gambar + 16 tabel + lampiran
Berdasarkan judul di atas, karya tulis ilmiah ini bertujuan untuk membuat Pesawat Roller Mixer yang waktu kerjanya dikendalikan oleh mikrokontroler AT89C51 agar memudahkan pengguna dalam melaksanakan tugas.
Roller Mixer merupakan alat Laboratorium yang berfungsi untuk mengaduk darah dengan anti koagulans. Roller-roller yang berputar dan bergoyang menyebabkan tercampurnya darah dengan anti koagulan. Pada umumnya pesawat Roller Mixer memiliki 2 pengaturan utama yaitu pengaturan waktu operasi alat dan pengaturan kecepatan
Dalam perenanaan pembuatan modul, penulis menggunakan IC Mikrokontroler yang diaplikasikan sebagai timer. Kemudian untuk pengturan kecepatan motor penulis menggunakan IC LM317, IC LM317 adalah regulator tegangan positif yang tegangan keluarannya dapat diatur. Perencanaan rangakaian alarm berfungsi sebagai indikator bahwa waktu yang diatur telah habis.
Metoda yang digunakan untuk mencapai maksud tersebut maka dilakukan penelitian dengan studi pustaka dan pembuatan modul, serta serangkaian pendataan, kemudian dari yang dibuat diperoleh hasil pengukuran sehingga penulis mendapatkan hasil yang akan menunjang penyusunan karya tulis ilmiah ini.
BIODATA
Nama mahasiswa : Alwi Hasbullah
Tempat, tanggal lahir : Jakarta, 18 Okober 1986
Alamat rumah : Jln. P.S.U.D III DC 94 Pekayon Jaya, Bekasi
Selatan
Telepon rumah : 021-82407047
Telepon seluler : 021-71444019, 085694455220
Alamat email : alwi_melpa@yahoo.co.id
Riwayat sekolah : SDN PEKAYON JAYA V lulus tahun 1998
SLTPN 12 BEKASI lulus tahun 2001 SLTA KAPIN JAKARTA lulus tahun 2004 Teknik Elektromedik lulus tahun 2007
Jakarta,6 Agustus 2007
Alwi Hasbullah P2 31 380 04 008
DAFTAR ISI
Halaman
SAMPUL DALAM i
PERNYATAAN KEASLIAN BUKU TUGAS AKHIR ii
PERSETUJUAN iii
PENGESAHAN iv
KATA PENGANTAR v
ABSTRAK vi
BIODATA vii
DAFTAR ISI viii
DAFTAR TABEL ix DAFTAR GAMBAR x DAFTAR LAMPIRAN xi BAB 1 PENDAHULUAN 1 1.1 Latar Belakang 1 1.2 Tujuan Penulisan 2 1.2.1 Tujuan umum 2 1.2.2 Tujuan khusus 2 1.3 Pembatasan Masalah 2
1.4 Metodologi penelitian terapan 2
1.5 Sistematika Penulisan 3
BAB 2 DASAR TEORI 5
2.1 Darah dan Anti koagulans 5
2.2 Gambaran Umum Pesawat Roller Mixer 6
2.3 Dekoder IC 74LS47 7
2.4 Seven Segmen sebagai Tampilan Digital 9
2.5 Motor DC 11
2.6 Transistor 12
2.7 LM 78xx sebagai Regulator 16
2.8 Mikrokontroller AT89C51 17
2.9 IC LM 317 Sebagai Regulator Tegangan Positif 26
2.10 Rellay 27
BAB 3 KEGIATAN PENELITIAN TERAPAN 29
3.1 Spesifikasi 29
3.1.1 Spe
sifikasi fungsional 29
3.1.2 Spe
sifikasi Teknis 29
3.2 Perencanaan Blok Diagram 30
3.3 Implementasi Rangkaian 31
3.3.1 Perancangan Rangkaian Key Pad 31
3.3.2 Perancangan Rangkaian Display 32
3.3.3 Perancangan Rangkaian Alarm 34
3.3.4 Perancangan Rangkaian Kecepatan Motor 35 3.3.4 Perancangan Sistem Minimum Mikrokontroler 37
BAB 4 PENGUJIAN dan ANALISIS 43
4.1 Persiapan Alat dan Bahan 43
4.2 Metode Pendataan 47 4.3 Penyajian Data 48 4.4 Analisa Data 50 BAB 5 KESIMPULAN 56 DAFTAR ACUAN 57 DAFTAR PUSTAKA 58 LAMPIRAN 59
DAFTAR TABEL
ixHalaman 2.1. Hubungan Sinyal Masukan Dan Keluaran Dekoder IC 74LS47 8
2.2. Format Display Seven Segmen. 10
2.3. Kerakteristik IC Tipe 78xx
17
2.4. Deskripsi Pin 18
3.1. Hubungan Sinyal Masukan Dan Keluaran Dekoder IC 74LS47 34
4.1. Komponen Rangkaian Power Supply 42
4.2. Blok Sistem Minimum Mikrokontroler 43
4.3. Blok Setting Timer 43
4.4. Blok Display 43
4.5. Blok Pengatur Kecepatan Putaran Motor Dan Buzzer 44
4.6. Test Point 1 46
4.7. Test Point 2 46
4.8. Test Point 3 47
4.9. Test Point 4 47
4.10 Hasil Perbandingan Waktu 47
4.11 Hasil Perbandingan Kecepatan 47
DAFTAR GAMBAR
Halaman
2.1. Gambar Fisik Roller Mixer 7
2.2. Gambar Konfigurasi Penampilan Tujuh Segmen 9
2.3. Gambar Penentu Arah Gerak Kawat Berarus 12
2.4. Gambar Prinsip Kerja Motor DC 12
2.5. Gambar Tiga Daerah Transistor 13
2.6 Gambar Rangkaian Transistor Sebagai Saklar 14
2.7. Gambar Taransistor Sebagai Saklar 15
2.8. Gambar Garis Beban DC Pada Transistor Sebagai Saklar
16
2.9. Gambar IC Tipe 78xx
16
2.10. Gambar Susunan Pena MikrokontrolerAT89C51 17
2.11. Gambar Memori Data Internal
21
2.12. Gambar Pemakaian Kristal Pada Mikrokontroler AT89C51
25
2.13. Gambar Pemakaian Jalur External Osilator Signal Pada Mikrokontroler 26
2.14. Gambar Bentuk Fisik IC LM 317 27
2.15. Gambar Konstruksi Relay 27
3.1. Gambar Blok Diagram Rangkaian Pesawat Roller Mixer
30
3.2. Gambar Rangkaian Key Pad
32
3.3. Gambar Rangkaian Display
33
3.4. Gambar Rangkaian Alarm
35
3.5. Gambar Rangkaian Pengaturan Kecepatan Motor
36
DAFTAR LAMPIRAN
Halaman 1.Wiring diagam roller mixer 58
2.Program roller mixer 59
3.Referensi pesawat roller mixer 63
4.Data sheet IC Mikrokontroler AT89C51 64
5.Data sheet LM 317 73
6.Data sheet IC 74LS47 80
BAB 1
PENDAHULUAN
1.1LATAR BELAKANG
Peralatan laboratorium adalah peralatan yang ada di dalam laboratorium yang berfungsi sebagai salah satu alat penunjang kesehatan. Salah satu pemeriksaan dalam laboratorium adalah pemeriksaan hematology (ilmu yang mempelajari tentang struktur dan fungsi sel – sel darah ). Darah yang akan diproses untuk pemeriksaan laboratorium akan cepat membeku dikarenakan darah memiliki kandungan zat pembeku darah ( kogulans ).
Untuk menghindari hal tersebut, darah harus dicampur dengan zat anti pembeku darah ( anti koagulans ) dan dalam proses pencampuranya dibantu oleh pesawat roller mixer. Sampai saat ini masih sulit ditemukan pesawat roller mixer yang sudah dilengkapi pengaturan waktu beserta display waktu tersebut. Hal itu
dapat mempersulit pengguna alat ini dalam menentukan waktu pencampuran sesuai dengan yang diinginkan secara tepat dan akurat..
Lamanya waktu pencampuran antara darah dengan zat anti pembeku darah berkisar antara 15 menit sampai dengan 20 menit dengan kecepatan 37 rpm. Dari uraian diatas maka penulis tertarik membahas dan membuat alat tersebut dan penyusunanya menjadi sebuah karya tulis ilmiah, maka karya tulis ini penulis ajukan dengan judul:
“ RANCANG BANGUN PEMODELAN PESAWAT ROLLER
MIXER
BERBASIS MIKROKONTROLER AT89C51 “
1.2 TUJUAN PENULISAN
Adapun tujuan penulisan karya tulis ini adalah untuk:
1.2.1 Tujuan umum
a. Sebagai syarat akhir menyesaikan studi di Politeknik Kesehatan Jakarta II Jurusan Teknik Elektromedik.
b. Penerapan atas ide serta teori yang didapatkan selama pendidikan untuk dapat diimplementasikan sehingga dapat berguna bagi peningkatan mutu dan pelayanan kesehatan.
1.2.3 Tujuan khusus
a. Membuat modul Rancang bangun pesawat roller mixer.
b. Mengetahui dan memahami cara kerja alat serta keakurasian secara teori
maupun praktek
1.3 PEMBATASAN MASALAH
Dalam penyusunan karya tulis ini, penulis membatasi pokok-pokok bahasan yang berkaitan dengan proses kerja pencampuran darah dengan menggunakan pesawat roller mixer meliputi rangkaian pewaktu 1 menit sampai 5 menit, kontrol motor 35 rpm dan 45 rpm, zat yang digunakan hanya EDTA (ethylene diamene tetra acetate). Hal ini dimaksudkan agar tidak terjadi kerancuan dan pelebaran masalah dalam penyajian dan pembahasan karya tulis.
1.4METODOLOGI PENELITIAN TERAPAN
Dalam penyusunan karya tulis ini metode yang digunakan adalah sebagai berikut:
1. Studi pustaka
Dilaksanakan dengan mencari dan mempelajari buku-buku dan sumber-sumber literatur yang berhubungan dengan karya tulis ini sebagai bahan analisa.
2 Perencanaan Modul
Perencanaan dan perancangan alat yaitu dengan melakukan penggalian dan perumusan ide untuk membuat alat denga bantuan informasi yang didapat dari hasil pustaka.
3. Melakukan pembuatan modul pesawat Roller Mixer 4. Uji coba
Modul yang telah jadi di uji coba agar dapat data-data sebagai laporan. 5. Analisa data
Data-data yang di dapat dari hasil uji coba akan di analisa dan di bandingkan dengan teori berdasarkan studi literatur.
6. Penyusunan laporan
Dengan membuat karya tulis ilmiah yang merupakan hasil studi pustaka dan pendataan yang dibuat.
1.5 SISTEMATIKA PENULISAN
Untuk mempermudah dalam mempelajari serta memahami karya tulis ini, penulis menyajikan kerya tulis ini menjadi beberapa bab yaitu:
BAB 1 PENDAHULUAN
Memberikan gambaran secara umum dan singkat mengenai hal-hal yang berkaitan dengan latar belakang masalah sebagai dasar pemilihan judul, pembatasan masalah, tujuan penulisan, metode penulisan dan sistematika penulisan.
BAB 2 DASAR TEORI
Menjelaskan dan menerangkan dasar-dasar teori yang menunjang pembahasan.
BAB 3 KEGIATAN PENELITIAN TERAPAN
Menjelaskan bagian-bagian dari rangkaian yang akan dibuat dengan blok diagram.
BAB 4 PENGUJIAN DAN ANALISIS
Menyajikan langkah-langkah pengujian serta hasil pendataan pada beberapa titik pengukuran yang telah di tetapkan sebelumnya,
BAB 5 KESIMPULAN
Berisi kesimpulan dari hasil pembahasan secara keseluruhan dan saran-saran untuk pengembangan pesawat tersebut dimasa yang akan datang.
DAFTAR ACUAN DAFTAR PUSTAKA LAMPIRAN
BAB 2
DASAR TEORI
2.1 Darah dan Anti Koagulans
Hematologi adalah ilmu yang mempelajari struktur, fungsi dan penyakit darah serta mempelajari jaringan tubuh dan organ yang membentuk darah. Darah adalah suspensi dari partikel dalam larutan koloid cair yang mengandung elektrolit. Peranannya sebagai medium pertukaran antara sel-sel yang terfiksasi dalam tubuh dan lingkungan luar serta memiliki sifat-sifat protektif terhadap organisme sebagai suatu keseluruhan dan khususnya terhadap darah sendiri.
Darah merupakan bagian terpenting dari system transportasi di dalam tubuh manusia. Darah merupakan jaringan berbentuk cairan yang terdiri dari dua bagian yaitu :
a) Plasma darah, terdiri dari 91% sampai 92 % air yang berperan sebagai medium transport.
b) Sel-sel darah yang terdiri dari sel darah putih (leukosit) berfubgsi untuk mengatasi infeksi, sel darah merah (eritrosit) berfungsi untuk mengangkut dan melakukan pertukaran O2 dan CO2, dan sel darah pembeku (trombosit).
Karena darah memiliki kandungan zat pembeku darah maka darah yang akan diperiksa dalam laboratorium akan cepat membeku. Agar sampel darah yang akan diperiksa jangan sampai membeku dapat dipakai bermacam-macam anti koagulans. Tetapi tidak semua anti koagulans dapat dipakai karena ada yang banyak berpengaruh terhadap bentuk eritrosit atau leukosit yang akan diperiksa morfologinya.
Anti koagulans yang dapat dipakai diantaranya :
a. EDTA (ethylene diamene tetra acetate) sebagai
garam natrium atau kalium. Garam-garam itu mengubah ion kalsium dari darah menjadi bentuk yang bukan ion. EDTA tidak berpengaruh terhadap dasar dan bentuk eritrosit serta tidak juga terhadap bentuk leukosit. Selain itu EDTA mencegah trombosit bergumpal, karena itu EDTA sangat baik dipakai sebagai anti koagulans. Tiap 1 mg EDTA menghindarkan membekunya 1 ml darah. Hindarkan pemakaian EDTA dalam jumlah berlebihan, bila dipakai lebih dari 2 mg per ml darah maka nilai hematokrit menjandi lebih rendah dari yang sebenarnya. EDTA sering dipakai dalam bentuk larutan 10%. Kalau ingin menghindarkan terjadinya pengenceran darah, zat kering pun boleh dipakai, akan tetapi dalam hal terakhir ini perlu sekali menggoncangkan wadah berisi darah dan EDTA selama 1-2 menit. Sebabnya EDTA kering lambat melarut.
b. Heparin berdaya seperti antitrombi, tidak
berpengaruh terhadap bentuk eritrosit dan leukosit. Dalam praktek sehari-hari heparin kurang banyak dipakai karena mahal harganya. Tiap 1 mg heparin menjaga bekunya 10 ml darah. Heparin boleh dipakai sebagai larutan atau dalam bentuk kering.
c. Natriumsitrat dalam larutan 3,8% yaitu larutan
isotonik dengan darah. Dapat dipakai untuk beberapamacam percobaan hemogarik dan untuk laju endap darah cara Westergen.
d. Campuran Amoniumoxalat dan kaliumoxalat menurut paul dan heller yang juga dikenal sebagai campuran oxalat seimbang. Dipakai dalam keadaan kering agar tidak mengencerkan darah yang diperiksa.
2.2 Gambaran Umum Pesawat Roller Mixer
Secara umum pesawat roller mixer adalah seperangkat alat laboratorium yang digunakan untuk mencampur antara sampel darah dan zat pereaksi. Pada hal ini zat yang dicampur adalah darah dan zat anti koagulans. Dengan alat ini diharapkan pencampuran darah dan koagulans dapat lebih merata. Pencampuran antara darah dan zat anti koagulans manyebabkan darah akan tetap cair. Pada alat ini memanfaatkan silinder-silinder (roller) yang diputar dan digoyangkan oleh motor. Di atas putaran dan bergoyangnya roller ditaruh kuvet yang berisi darah dan zat anti koagulans, sehingga kuvet akan ikut berputar dan bergoyang. Karena peristiwa tersebut akan terjadi pencampuran antara darah dan zat anti koagulans. Adapun contoh gambar fisik roller mixer dapat dilihat pada gambar 2. I :
Gambar 2. 1 Gambar Fisik Roller Mixer
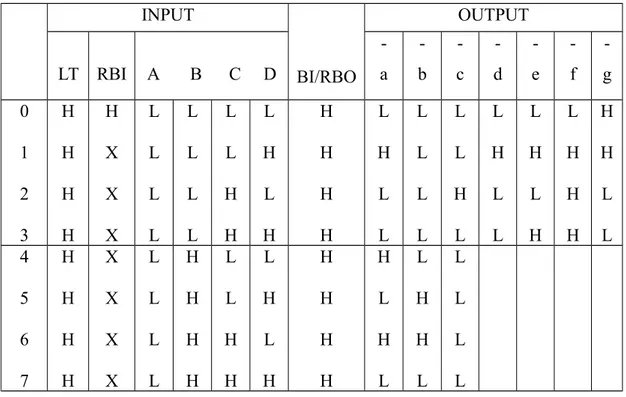
2.3 DEKODER IC 74LS47
Dekoder adalah suatu rangkaian logika yang berfungsi untuk merubah kode-kode biner menjadi tanda-tanda yang dapat ditandai secara visual. Dekode-koder BCD to seven segmen, artinya bahwa data-data biner 4 bit yang masuk kedalam rangkaian tersebut, akan diterjemahkan kedalam bentuk desimal yang kemudian akan ditampilkan, pada peraga seven segmen sesuai dengan harga binernya. Hubungan antara sinyal masukan dan sinyal keluaran dekoder dapat dilihat pada tabel 2. 1 dibawah ini :
Tabel 2. 1 Hubungan sinyal masukan dan keluaran dekoder IC 74LS47 INPUT BI/RBO OUTPUT LT RBI A B C D -a -b -c -d -e -f -g 0 1 2 3 H H H H H X X X L L L L L L L L L L H H L H L H H H H H L H L L L L L L L L H L L H L L L H L H L H H H H H L L 4 5 6 7 H H H H X X X X L L L L H H H H L L H H L H L H H H H H H L H L L H H L L L L L xx
8 H X H L L L H L L L 9 10 11 12 13 H H H H H X X X X X H H H H H L L L H H L H H L L H L H L H H H H H H L H H H L L H H L H L H L H H H L L H L H L H H H L H H L L L L L L L 14 H X H H H L H H H H L L L L 15 BI RBI LT H X H L X X L X H X L X H X L X H X L X H X L X H L L H H H H L H H H L H H H L H H H L H H H L H H H L H H H L
2.4 Seven Segmen sebagai Tampilan Digital
Display merupakan indikator yang sering digunakan pada peralatan sistem digital . salah satu contohnya yaitu seven segmen. Sistem penampil seven segmen pada dasarnya merupakan susunan dari tujuh buah led yang disajikan dalam suatu paket. Satu led dari paket seven segmen mempunyai arti. Pada penelitian ini penulis memakai seven segmen jenis common anoda seperti yang terlihat pada gambar 2.2 dibawah ini :
Common Anode Common Katode
xxi c d e gg b a c o m f c o m a b c d e g f
Gambar 2.2 Konfigurasi Penampil Seven Segmen
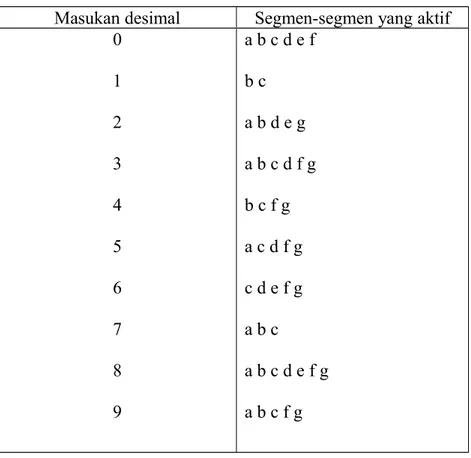
Dengan mengkombinasikan segmen-segmen tersebut dapat membentuk digit-digit desimal misalnya angika 1, maka segmen b dan c yang menyala, sedangkan untuk membentuk angka 2 maka segmen a, b, c, d, e dan g yang menyala, begitu seterusnya untuk lebih jelasnya dapat dilihat pada tabel 2.8 yang akan memperlihatkan segmen-segmen mana saja yang diaktifkan untuk membentuk suatu karakteristik angka desimal .
Format display seven segmen dapat dilihat pada tabel 2.2 di bawah ini
Tabel 2. 2 Format display seven segmen
Masukan desimal Segmen-segmen yang aktif
0 1 2 3 4 5 6 7 8 9 a b c d e f b c a b d e g a b c d f g b c f g a c d f g c d e f g a b c a b c d e f g a b c f g xxii
2.4.1 Common Katoda
Untuk seven segment tipe common Katoda, pada pin common masing-masing segmen katoda dihubungkan ke ground. Pada tipe ini diperlukan rangkaian driver yang menyediakan taraf tinggi untuk mengaktifkan sebuah segmen. Pada saat taraf tinggi diberikan ke masukan segmen, arus akan mengalir dan menyalakan LED atau segmen.
2.4.2. Common Anoda
Pada tipe common anoda, pin commond dari masing-masing segmen
digabungkan dan dihubungkan ke Vcc. Tujuh segmen common anoda memerlukan rangkaian driver yang menyediakan taraf rendah untuk menyalakan sebuah segment. Pada saat taraf rendah diberikan ke masukan segmen, maka segmen atau LED dibias maju. Arus akan mengalir dari Vcc ke segmen dan selanjutnya menuju taraf rendah yang disediakan ke rangkaian driver.
Dengan mengkombinasikan segmen-segmen tersebut maka kita dapat menvisualisasikan bilangan desimal. Dalam pembuatan pada rancangan modul, penulis menggunakan seven segmen sebagai display karena memiliki sifat-sifat diantara lain :
1. Tanggapan terhadap logika cepat 2. Menyala dengan tegangan rendah 3. Memerlukan tegangan dan arus kecil 4. Dapat terbaca dengan jelas
5. Mudah diperoleh dipasaran
2.5Motor DC
Motor adalah suatu alat listrik yang dapat mengubah energi listrik menjadi enegi mekanik. Pada prinsipnya mesin listrik dapat berlaku sebagai motor maupun generator. Perbedaannya terletak pada konversi dayanya, kalau generator adalah suatu sistem mesin listrik yang mengubah daya masuk mekanik menjadi daya keluar listrik, seddangkan motor mengubah daya masuk listrik menjadi daya keluar mekanik.
2.5.1 Prinsip Dasar motor DC
Prinsip dasar dari motor arus searah adalah : Jika sebuah kawat dialiri arus diletakkan antara kutub magnet (U - S), maka pada kawat itu akan bekerja suatu gaya yang menggerakkan kawat itu. Prinsip motor DC adalah berdasarkan gaya lorenz, yaitu sepotong kawat penghantar dialiri arus listrik dan ditempatkan dalam medan magnet maka akan timbul garis-garis yang tegak lurus dengan arah arus.
F B.I.L
Dimana :
F = Garis-garis gaya magnet
B = Kuat medan magnet
I = Kuat arus listrik pada kawat penghantar L = Panjang kawat penghantar
Gambar 2. 3 Gambar penetu arah gerak kawat berarus
Untuk mengetahui arah putaran motor searah atau berlawanan dengan arah jarum jam, dapat dilihat pada gambar II. 5. Arah arus listrik yang mengalir melalui sisi kumparan sebelah atas (dekat KU) meninggalkan kita. Sedangkan arus listrik yang mengalir sebelah bawah (dekat KS) menuju kita, maka kumparan akan berputar berlawanan dengan arah jarum jam. Jika ujung-ujung kumparan dihubungkan dengan sumber listrik DC dengan polaritas battery maka kumparan akan berputar sesuai dengan arah jarum jam.
kolektor n kolektor Basis p p n Emiter p Basis Emiter n Gambar 2.4 gambar prinsip kerja motor DC
2.6
Transistor
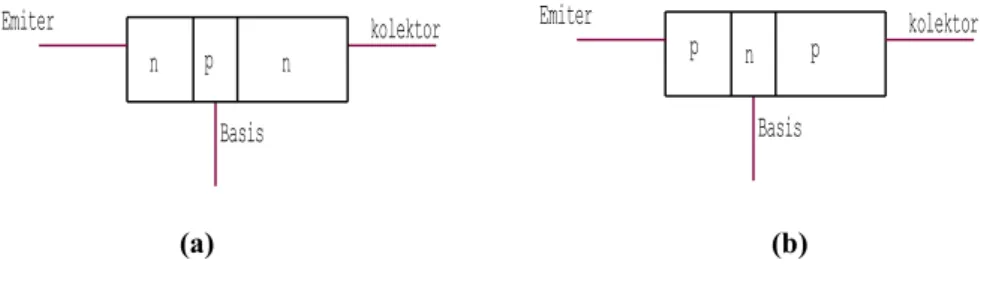
Transistor memiliki dua buah sambungan ( junction ), satu di antara emiter dan
basis dan lainnya diantara basis dan colector. Karena inilah, sebuah transistor
sama seperti sambungan dua buah dioda. Dioda yang terletak di sebelah kiri sebagai dioda emiter basis atau singkatnya dioda emitter. Dan dioda yang terletak di sebelah kanan adalah dioda colector basis atau dioda colector. Pertemuan kedua sambungan dioda itu bisa berupa katoda atau anoda, hal ini tergantung dari jenis transistor tersebut apakah jenis PNP atau NPN, sehingga bila kita lihat akan seperti gambar berikut :
(a) (b)
Gambar 2. 5 Tiga Daerah Transistor. (a) Transistor NPN. (b) Transistor PNP
Untuk membuat agar transistor dapat berkerja, maka transistor harus mendapat tegangan bias pada basisnya. Tegangan basis tersebut besarnya sekitar 0,7 V untuk transistor dari bahan silicon dan 0,3 V untuk transistor dari bahan germanium. Untuk transistor NPN membutuhkan tegangan bias basis positif terhadap ground, sedangkan transistor PNP membutuhkan tegangan bias basis negatif terhadap ground. Penggunaan transistor antara lain sebagai saklar dan sebagai pengikut Emitter ( Emitter Follower ). Di bawah ini akan dibahas dua penggunaan transistor tersebut.
2.6.1 Transistor sebagai saklar
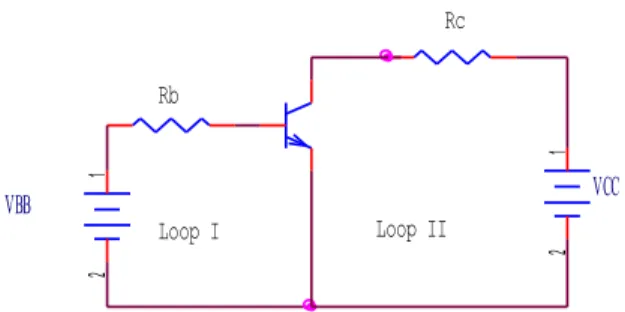
Transistor dapat digunakan sebagai saklar adalah dengan memanfaatkan karakteristik transistor ketika berada2 pada daerah operasi saturasi dan Cut-off. Jika pada basis transistor diberikan bias, yaitu dengan memberikan tegangan jatuh pada basis sebesar > 0,7 V (untuk Silikon ) dan > 0,3 V( untuk Germanium ) maka transistor akan berada pada daerah saturasi. Gambar II.6 memperlihatkan rangkaian transistor sebagai saklar.
Gambar 2. 6 Rangkaian Transistor Sebagai Saklar
Ketika transistor berada pada daerah saturasi maka transistor akan berlaku sebagai saklar tertutup, arus mengalir dari kolektor ke emitter dan menuju ground. Keadaan ini memberikan persamaan pada loop II, sesuai dengan hukum Kirchoff yaitu :
Vce Vrc
Vcc ………... .. (2.1)
Pada ujung daerah saturasi VCE = 0, maka :
Vrc Vcc .. ………... (2.2) Sehingga : Rc Vcc Ic ……….... (2.3) xxvi Loop I VCC 1 2 Rc Rb VBB 1 2 Loop II
Saat basis tidak mendapatkan tegangan bias yang optimal atau kurang dari 0,7 V maka transistor akan berkerja pada daerah cut-off atau seperti saklar terbuka. Dengan demikian tidak ada arus yang mengalir dari colector ke emitter menuju
ground. 0 Vce Vcc IcRc ………... (2.4) Karena IC = 0. maka : Vcc off cut Vce( ) ………... (2.5) Persamaan yang terjadi pada loop I, yaitu :
0
Vbe Vbb
IbRb ………... (2.6)
Arus basis adalah sebesar :
Rb Vbe Vbb
Ib ( ) ……….... (2.7)
Perbandingan arus yang mengalir pada colector dengan arus yang mengalir di basis disebut dengan penguatan (βdc), maka penguatan pada transistor adalah :
Ib Ic dc
………... (2.8)
Jika arus basis lebih besar atau sama dengan IB(sat), titik kerja Q berada pada
ujung atas garis beban DC. Dalam hal ini, transistor berkerja sebagai sebagai saklar tertutup. Sebaliknya, jika arus basis nol, transistor berkerja pada ujung bawah dari garis beban dan transistor berkerja sebagai saklar terbuka.
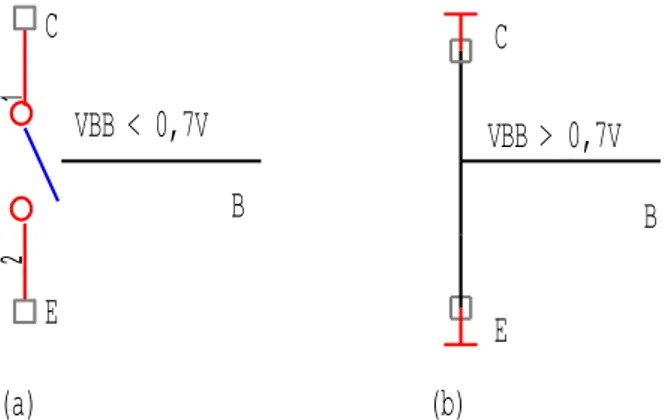
Kerja transistor sebagai saklar tertutup dan saklar terbuka dapat disimulasikan seperti gambar 2.7.
Gambar 2. 7 Transistor sebagai saklar. (a) Saklar terbuka. (b) Saklar tertutup
xxvii 1 2
VBB < 0,7V
(a)
C
B
VBB > 0,7V
(b)
C
E
B
E
VCC saturasi 0 Ic VCC/RC VCE cut-off
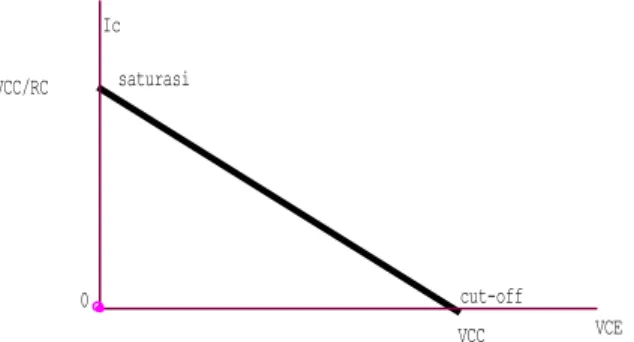
Adapun garis beban DC transistor yang beroperasi pada daerah saturasi dan
cut-off diperlihatkan pada gambar di bawah ini :
Gambar 2. 8 Garis beban DC pada Transistor sebagai saklar
2.7 LM 78xx sebagai Regulator
Sebagian besar rangkaian dalam dunia elektronika membutuhkan catu daya yang presisi dan stabil seperti catu daya yang dihasilkan oleh batere atau accu. Catu daya yang stabil ini merupakan penunjang dalam kestabilan rangkaian tersebut.
Setiap rangkaian elektronika mempunyai catu daya yang berbeda-beda. Jika kita menginginkan catu daya yang berbeda tetapi hanya mempergunakan satu buah trafo dan satu buah dioda bridge untuk rangkaian tersebut, maka otomatis hanya ada satu saja keluarannya, kecuali kita tambahkan beberapa rangkaian
divider (pembagi tegangan).
Hal seperti itu cukup merepotkan, lagi pula jika kita menggunagan rangkaian
divider maka arus pada keluarannya akan sangat kecil sekali. Untuk itu penulis
menggunakan regulator (penyetabil tegangan) dengan IC tipe 78xx dan 79xx. Tegangan keluaran dari IC ini sangat mendekati presisi, dan keluaran tegangannya pun bermacam-macam.
Berikut ini adalah skema fisik dari IC regulator dengan tipe 78xx dan 79xx :
xxviii LM 78xx
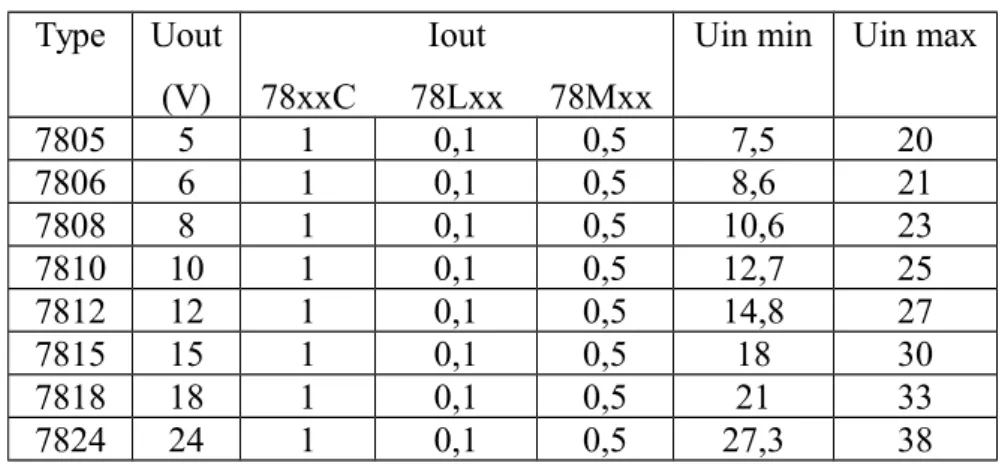
U 1 A T 8 9 C 5 1 9 1 8 1 9 2 9 3 0 3 1 1 2 3 4 5 6 7 8 2 1 2 2 2 3 2 4 2 5 2 6 2 7 2 8 1 0 1 1 1 2 1 3 1 4 1 5 1 6 1 7 3 9 3 8 3 7 3 6 3 5 3 4 3 3 3 2 R S T X T A L 2 X T A L 1 P S E N A L E / P R O G E A / V P P P 1 . 0 P 1 . 1 P 1 . 2 P 1 . 3 P 1 . 4 P 1 . 5 P 1 . 6 P 1 . 7 P 2 . 0 / A 8 P 2 . 1 / A 9 P 2 . 2 / A 1 0 P 2 . 3 / A 1 1 P 2 . 4 / A 1 2 P 2 . 5 / A 1 3 P 2 . 6 / A 1 4 P 2 . 7 / A 1 5 P 3 . 0 / R X D P 3 . 1 / T X D P 3 . 2 / I N T O P 3 . 3 / I N T 1 P 3 . 4 / T O P 3 . 5 / T 1 P 3 . 6 / W R P 3 . 7 / R D P 0 . 0 / A D 0 P 0 . 1 / A D 1 P 0 . 2 / A D 2 P 0 . 3 / A D 3 P 0 . 4 / A D 4 P 0 . 5 / A D 5 P 0 . 6 / A D 6 P 0 . 7 / A D 7 In Gnd Out (a) Gambar 2. 9 gambar IC 78xx Dibawah ini adalah table karakteristik dari IC tipe 78xx
Tabel 2. 3 karakteristik IC tipe 78xx
Type Uout
(V)
Iout
78xxC 78Lxx 78Mxx
Uin min Uin max
7805 5 1 0,1 0,5 7,5 20 7806 6 1 0,1 0,5 8,6 21 7808 8 1 0,1 0,5 10,6 23 7810 10 1 0,1 0,5 12,7 25 7812 12 1 0,1 0,5 14,8 27 7815 15 1 0,1 0,5 18 30 7818 18 1 0,1 0,5 21 33 7824 24 1 0,1 0,5 27,3 38
2.8 Mikrokontroler AT89C51
Dalam rangkaian berskala besar, biasanya dilengkapi dengan sebuah unit pusat pemprosesan. Pusat pemprosesan ini atau lebih dikenal dengan nama Central
Prosesing Unit ( CPU ) banyak mempermudah pengendalian proses kerja
rangkaian.
Dilihat dari komponen pelengkap yang tersusun dalam serpihan prosesor tersebut, ada sebuah prosesor yang dalamnya telah dilengkapi dengan prosesor fungsi metematik ( Math co – prosesor ), ada yang dilengkapi dengan pengubah analog ke digital ataupun sebaliknya, adapun yang dilengkapi dengan fasilitas pemprosesan sinyal – sinyal digital (DSP, Digital Signal Processing) dan juga telah dilengkapi dengan port – port input / output, ROM, RAM seperti yang telah terdapat pada mikrokontroler.
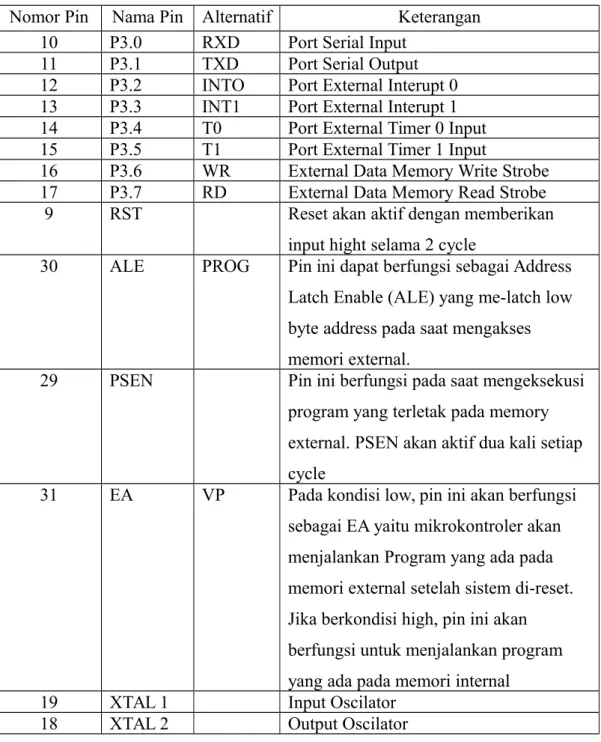
Gambar 2. 10 Susunan Pena Mikrokontroler AT89C51 Tabel 2.4 Deskripsi pin
Nomor Pin Nama Pin Alternatif Keterangan
10 P3.0 RXD Port Serial Input
11 P3.1 TXD Port Serial Output
12 P3.2 INTO Port External Interupt 0
13 P3.3 INT1 Port External Interupt 1
14 P3.4 T0 Port External Timer 0 Input
15 P3.5 T1 Port External Timer 1 Input
16 P3.6 WR External Data Memory Write Strobe
17 P3.7 RD External Data Memory Read Strobe
9 RST Reset akan aktif dengan memberikan
input hight selama 2 cycle
30 ALE PROG Pin ini dapat berfungsi sebagai Address
Latch Enable (ALE) yang me-latch low byte address pada saat mengakses memori external.
29 PSEN Pin ini berfungsi pada saat mengeksekusi
program yang terletak pada memory external. PSEN akan aktif dua kali setiap cycle
31 EA VP Pada kondisi low, pin ini akan berfungsi
sebagai EA yaitu mikrokontroler akan menjalankan Program yang ada pada memori external setelah sistem di-reset. Jika berkondisi high, pin ini akan berfungsi untuk menjalankan program yang ada pada memori internal
19 XTAL 1 Input Oscilator
18 XTAL 2 Output Oscilator
AT89C51 adalah mikrokontroler keluaran Atmel dengan 4K byte Flash. PEROM (Programmable and Erasable Read Only Memory), AT89C51 merupakan memori dengan teknologi nonvolatile memory, isi memori tersebut terdapat diisi ulang ataupun dihapus berkali – kali.
Memori ini biasa digunakan untuk menyimpan intruksi ( perintah ) berstandar MCS- 51 code sehingga memungkinkan mikrokontroler ini untuk bekerja dalam
mode single chip operation ( mode operasi 31eeping tunggal ) yang tidak
memerlukan external memory ( memori luar ) untuk menyimpan source code tersebut.
Mikrokontroler AT89C51 mempunyai karakteristik sebagai berikut: 1. Compatible dengan MCS – 51.
2. 4K byte EEPROM internal 3. frekuensi clock : 0 Hz – 24 Mhz 4. 32 programable I/O line
5. Two 16 bit timer / counter
6. 64K address space for external data memory 7. 64K address space for external program memory 8. 6 interupt sources t
9. Bolean processor
Untuk dapat bekerja mikrokontroler AT89C51 membutuhkan catu daya tunggal sebesar + 5 Volt.
2.8.1 Central Prosessing Unit ( CPU )
Central Prosessing Unit yang terdapat dalam AT89C51 merupakan CPU 8 bit
yang dilengkapi dengan osilator dalam serpihannya dengan frekuensi kerja mulai dari 3,5 MHz sampai dengan 24 MHz. Batas frekuensi kerja minimum ini disebabkan sifat CPU yang tidak static. CPU banyak menggunakan simpul – simpul dinamik berupa sel – sel penyimpanan sementara yang dibentuk oleh kapasitansi simpul – simpul ground. Pemakaian simpul – simpul dinamik ini
menunjukkan untuk menghemat transistor yang diperlukan, yang berarti juga penghematan luas serpihan secara keseluruhan.
Pada frekuensi yang terlalu rendah isi sel penyimpanan sementara akan mengalami perubahan karena ada kebocoran arus, hal ini mengakibatkan level tegangan pada salah satu simpul CPU berubah. Perubahan level tegangan pada salah satu simpul mengakibatkan CPU tidak dapat mengingat operasi yang baru saja dilaksanakan.
Dalam AT89C51, satu siklus mesin terdiri dari 12 periode osilator. Artinya untuk ferkuensi osilator 12 MHz satu siklus mesin akan dilalui waktu 1µS.
Satu siklus =12 T
F
T 1
Satu siklus =
121
12
MhzSatu siklus = 1 S...(2,9)
Waktu pelaksanaan intruksi terpendek adalah satu siklus mesin, sedangkan yang terpanjang sampai empat siklus mesin.
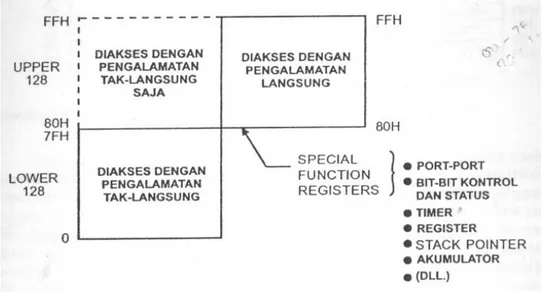
2.8.2 Organisasi Memori
Memori program dan memori data dapat dipisahkan secara logika dengan cara membedakan sinyal PSEN untuk pembacaan program atau data, hasilnya CPU akan dapat mengakses 64 Kbyte data. Walaupun kapasitas memori yang digunakan lebih kecil dari 64 Kbyte. Untuk lebar memori alamat internal 8 bit atau 16 bit. Di samping memori data, AT89C51 juga mempunyai RAM berupa register untuk fungsi khusus SFR ( Spesial Funtion Register ) dengan kapasitas 128 byte.
RAM internal sebesar 128 byte ini terdiri dari 32 byte paling bawah dikelompokan menjadi 4 bank, yang masing – masing terdiri dari 8 buah register. Program dapat mengakses register – register tersebut dengan operand R0 sampai R7 pengalamatan register, untuk pemilihan bank dilakukan melalui register
program status word, PSW, 16 byte di atas ke empat bank, register membentuk
satu blok memori yang dialamati. Memori data ini dapat dialamati langsung maupun tidak langsung.
Register dengan fungsi khusus, SFR terletak pada 128 byte bagian atas memori dan berisi Latch Port, timer, PSW dan control peripheral. Register – register ini hanya dapat diakses dengan pengalamatan langsung 16 alamat pada SFR dapat dialamati secara bit atau byte, dan terletak pada alamat yang berakhir 0000B.
Gambar 2. 11 Memori Data Internal
2.8.3 Port Input / Output
Fasilitas I/O yang pada mikrokontroler AT89C51 adalah 32 jalur Port, yang selanjutnya dibagi menjadi empat port 8 bit. Masing – masing port tersebut bersifat bidirectional, artinya dapat digunakan sebagai output maupun input. Masing – masing port dapat hubungi sebagai sekaligus 8 bit atau pun per – bit.
Port 0, 1, 2 dan 3 masing-masing menempati lokasi 80h, 90h, A0h dan B0h. Port 1, 2, 3 mempunyai pull-up internal sedangkan port 0 bersifat open drain.
Pada penggunaan port 1,2,3 sebagai input, pin – pinnya pada pull tinggi, selanjutnya dapat diset pada pull rendah pada sumber external. Dengan mengisi satu pada latch, maka port tersebut akan berfungsi sebagai output.
Berbeda dengan port 1, 2, 3 Port 0 tidak mempunyai pull-up internal. Jika isi
latch di buat satu maka port ini berfungsi sebagai input dan jika isi latch di buat 0,
maka port ini berfungsi sebagai output.
a. Port 0 merupakan port keluaran / masukan (I/O) bertipe
open drain bidirectional. Port 0 juga dapat dikonfigurasikan sebagai
bus alamat / data bagian rendah (low byte) selama proses pengaktifan memori data dan program eksternal. Jika digunakan dalam mode ini
Port 0 memiliki puul up internal.
b. Port 1 merupakan port I/O dwi arah. Port 1 juga menerima
alamat bagian rendah (low byte) selama pemrograman dan verifikasi flash.
c. Port 2 merupakan port I/O dwi arah. Port 2 akan
memberikan byte alamat bagian tinggi (high byte) selama pengambilan instruksi dari memori eksternal dan selama pengaksesan memori data eksternal. Port 2 juga menerima alamat bagian tinggi selama pemrograman dan verifikasi flash.
d. Port 3 merupakan port I/O dwi arah. Port 3 juga memiliki
fungsi-fungsi alternatif, yaitu:
1) Port 3.0 : Sebagai RXD, yaitu pasak pin
masukan pada saat mikrokontroler menerima data dari luar dengan system komunikasi serial.
2) Port 3.1 : Sebagai TXD, yaitu pin keluaran pada saat mikrokontroler mengirim data keluar dengan system komunikasi serial.
3) Port 3.2 : Sebagai pin Interupt ( INT0 ) dan,
4) Port 3.3 : Sebagai pin interrupt ( INT1 ), pin yang menerima selaan ( interupsi) dari luar.
5) Port 3.4 : Sebagai T0 dan,
6) Port 3.5 : Sebagai T1, yaitu sebagai pin masukan timer atau counter eksternal yang dapat diprogram secara software.
7) Port 3.6 : Sebagai WR, yaitu sinyal yang dikeluarkan pada saat mikrokontroler ingin melakukan pembacaan memori data eksternal.
8) Port 3.7 : Sebagai RD, yaitu sinyal yang di keluarkan pada saat mikrokontroler ingin melakukan penulisan pada memori data
eksternal ( RAM eksternal ).
Pada intruksi pembacaan, maka mikrokontroler AT89C51 mengambil data dari EEPROM dan selanjutnya akan diproses sesuai dengan isntruksi yang diberikan.
2.8.4 System Interupt
AT89C51 mempunyai system interupt yang terdiri dari lima sumber, yaitu : dua dari luar atau sumber eksternal melalui pin INT0 dan INT1, satu dari masing – masing counter internal ( dua buah ) dan satu dari serial port . kelima interrupt tersebut dapat diaktifkan sendiri – sendiri ( individual ).pada penulisan ini ,
interrupt yang digunakan adalah sumber dari luar melalui INT 0 dan INT 1.
Masing-masing sumber intrupsi dapat dinonaktifkan sendiri-sendiri dengan mengatur bit-bit yang terkait dalam register IE (Interupt Enable) di alamat A8h. Pemrosesan interupsi, saat terjadi interupsi kemudian dterima CPU di dalam mikrokontroler, maka program akan menghentikan terlebih dahulu kemudian dikerjakan langkah-lagkah penanganan interupsi sebagai berikut :
1. Instruksi yangsedang dikerjakan diselesaikan terlebih dahulu. 2. Isi PC (program counter) disimpan ke stack.
3. Status interupsi yang bersangkutan disimpan ke stack. 4. Interupsi-interupsi pada tingkat yang sama diblokir.
5. PC kemudian diisi alamat vektor rutin layanan interupsi (RLI) yang bersangkutan
6. RLI dikerjakan.
2.8.5 Pengelompokan Intruksi
Instruksi yang dapat dikelompokan oleh mikrokontroler AT89C51 dibagi menjadi beberapa kelompok ( mode ). Pengelompokan ini dilakukan untuk mempercepat proses pengolahan suatu instruksi.
Instruksi perangkat lunak dibagi menjadi lima kelompok yaitu: 1 Instruksi transfer data.
Instruksi ini untuk memindahkan data, yaitu antar register, dari memori ke memori, dari register ke memori, dari antarmuka ke register, dan dari antarmuka ke memori.
2 Instruksi aritmetika.
Instruksi ini untuk melaksanakan operasi aritmetika yang meliputi penjumblahan, pengurangan, penambahan satu (increment), pengurangan satu (decrement), perkalian, dan pembagian.
3 Instruksi logika dan manipulasi bit.
Instruksi ini untuk melaksanakan operasi logika AND, OR, XOR, perbandingan, dan pergeseran.
4 Instruksi percabangan.
Instruksi ini untuk melaksanakan perubahan urutan normal pelaksanaan suatu program, dengan instruksi-instruksi ini program yang sedang dilaksanakan akan melompat ke suatu alamat tertentu.
5 Instruksi stack, I/O, dan kontrol.
Instruksi ini mengatur penggunaan stack, membaca,/menulis port I/O, serta pengontrolan.
Konfigurasi pin mikrokontroler AT 89C51 :
RST : Berfungsi untuk mereset mikrokontroler AT89C51 atau mengclear control register dan men – set semua port pada mode input.
ALE : Pada saat logika rendah ( posisi ALE ) digunakan untuk menahan alamat ke memori eksternal. Pada saat berlogika tinggi, maka mikrokontroler pada posisi siap untuk diprogram.
PSEN : Berfungsi untuk mengaktifkan memori program eksternal (eprom eksternal) ke bus.
EA/Vpp : Saat pada logika tinggi, AT89C51 melakukan instruksi dari EEPROM internal, sedangkan pada level rendah , AT89C51 mengambil seluruh intruksi dari EEPROM eksternal.
XTAL : Merupakan pin oscillator yang menghasilkan clock yang biasanya berasal dari kristal piezoelektrik atau
resonator keramik.
2.8.6 On – chip Osillator
Mikrokontroler AT89C51 memiliki osilator internal ( on-chip oscillator ) yang digunakan sebagai sumber clock bagi CPU. Untuk menggunakan osilator internal diperlukan sebuah kristal antara pena XTAL1 (X1) dan XTAL2 (X2) dan sebuah kapasitor ke ground seperti terlihat pada gambar berikut ini:
xxxvii VCC U1 AT89C51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 PSEN ALE/PROG EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTOP3.3/INT1 P3.4/TOP3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 X1 12MHz C1 30pF C2 30pF
V C C U 1 A T 8 9 C 5 1 9 1 8 1 9 2 9 3 0 3 1 1 2 3 4 5 6 7 8 2 1 2 2 2 3 2 4 2 5 2 6 2 7 2 8 1 0 1 1 1 2 1 3 1 4 1 5 1 6 1 7 3 9 3 8 3 7 3 6 3 5 3 4 3 3 3 2 R S T X T A L 2 X T A L 1 P S E N A L E / P R O G E A / V P P P 1 . 0 P 1 . 1 P 1 . 2 P 1 . 3 P 1 . 4 P 1 . 5 P 1 . 6 P 1 . 7 P 2 . 0 / A 8 P 2 . 1 / A 9 P 2 . 2 / A 1 0 P 2 . 3 / A 1 1 P 2 . 4 / A 1 2 P 2 . 5 / A 1 3 P 2 . 6 / A 1 4 P 2 . 7 / A 1 5 P 3 . 0 / R X DP 3 . 1 / T X D P 3 . 2 / I N T OP 3 . 3 / I N T 1 P 3 . 4 / T OP 3 . 5 / T 1 P 3 . 6 / W RP 3 . 7 / R D P 0 . 0 / A D 0 P 0 . 1 / A D 1 P 0 . 2 / A D 2 P 0 . 3 / A D 3 P 0 . 4 / A D 4 P 0 . 5 / A D 5 P 0 . 6 / A D 6 P 0 . 7 / A D 7 N C E x t e r n a l O s i l l a t o r S i g n a l
Gambar 2. 12 Pemakaian kristal pada mikrokontroler AT89C51
Gambar2. 13 Pemakaian jalur exsternal osilator signal pada mikrokontroler
Mikrokontroler AT89C51 menggunakan sumber Clock Eksternal. Nilai kapasitor yang digunakan untuk kristal yaitu 30pF-10pF. Sedangkan untuk resonan keramik yaitu 40pF – 10pF.
2.9 IC LM 317 sebagai Regulator Tegangan Positif
LM 317 adalah sebuah regulator tegangan positif yang dapat diatur, memiliki 3 terminal (pin) dan mampu untuk mencatu lebih dari 1,5A pada tegangan keluaran dalam jangka antara 1,2 V hingga 37 V. IC ini mudah sekali digunakan, karena hanya memerlukan dua resistor ekstern guna menentukan tegangan keluarannya. Selain itu, peregulasian beban maupun peregulasian jaringan pada IC ini lebih baik dari regulator-regulator tetap yang standar.Pada chip itu pun terdapat pula pembatas arus, pengaman terhadap pembebanan lebih termik (suhu).
Adjust out in
Gambar 2. 14 Bentuk Fisik IC LM 317
Pada pengaturan tegangan output dari IC LM317, berdasarkan dari data sheet IC LM317 memiliki rumusan sebagai berikut :
1 2 1 25 , 1 R R Vout
Dimana : R1 = Hambatan tetap
R2 = Hambatan yang didapat diubah-ubah
2.10 RELAY
Relay adalah suatu komponen elektronika yang berfungsi sebagai penggerak kontaktor untuk menghubungkan suatu bagian rangkaian dengan rangkaian yang lain. Relay bekerja dengan memanfaatkan sifat elektromagnetik yang terjadi pada suatu kumparan ketika dialiri arus. Pada gambar II.25 memperlihatkan konstruksi sebuah relay dengan sepasang kontaktor normaly close(on) dan sepasang normaly
open (off). inti besi input NC NO Vin 3 5 4 1 2
Gambar 2. 15 Konstruksi Relay
Sebuah relay sederhana terdiri dari satu inti besi, lilitan yang mengintari inti besi, terminal penggerak, terminal normaly close (NC) dan terminal normaly open (NO). Pada saat lilitan tidak mendapat supply maka tidak ada arus yang mengalir pada lilitan dan tidak ada medan magnet yang terjadi pada inti besi. Pada saat ini kontaktor berada pada posisi awal, yang menghubungkan masukan kepada keluaran yang disebut dengan normaly close. Dengan demikian kaki keluaran lainnya disebut dengan normaly open, dimana ketika tidak ada catu daya yang mengalir, terminal tersebut mendapat hubungan terbuka, ketika lilitan diberikan arus yang optimal, arus mengitari inti besi yang menyebabkan inti besi menghasilkan medan magnet dan inti besi bersifat sebagai magnet. Ini menyebabkan kontaktor tertarik sehingga berpindah pada kontaktor yang lainnya, kontaktor (NO) menjadi close sedangkan kontaktor (NC) dalam keadaan on menjadi open.
BAB 3
KEGIATAN PENELITIAN TERAPAN
Pada bab ini akan dijelaskan langkah-langkah yang digunakan dalam merealisasikan perangkat keras (hardware) dan perangkat lunak (sofware) seperti yang dimaksud dalam tujuan penulisan.
3.1 Spesifikasi
3.1.1 Spesifikasi Fungsional
Alat roller mixer adalah seperangkat alat laboratorium yang digunakan untuk mencampur antara sampel dan zat pereaksi. Pada hal ini yang dicampur adalah darah dan zat anti koagulans. Pencampuran antara darah dan zat anti koaulans menyebabkan darah akan tetap cair, pada alat ini memanfaatkan silinder-silinder (roller) yang diputar dan digoyangkan oleh motor. Diatas putaran dan bergoyangnya roller ditempatkan kuvet yang berisi darah dan zat anti koagulans, sehingga kuvet akan ikut berputar dan bergoyang. Karena peristiwa tersebut akan terjadi pencampuran antara darah dan zat anti koagulans.
3.1.2 Spesifikasi Teknis
Adapun spesifikasi teknis dari alat ini adalah sebagai berikut :
Catu daya : +5 VDC dengan ground dan +15 VDC dengan ground
Frekuensi : 50Hz
Kecepatan putaran : 35 Rpm dan 45 Rpm
Pengaturan waktu : 1 menit sampai 5 menit
Data teknis : a. Mikrokontroler AT89C51
b. Motor DC 12V c. Buzzer 12V
3.2 Perencanaan Blok Diagram
Secara keseluruhan, modul rangkaian ini dapat diuraikan dalam beberapa blok diagram, sebagai berikut :
Gambar 3. 1Blok Diagram Rangkaian Pesawat Roller Mixer
Dari blok diagram diatas dapat dijelaskan secara singkat cara kerja dari alat roller mixer tiap-tiap blok diagram :
1. Rangkaian key pad
Rangkaian ini berfungsi sebagai masukan bagi rangkaian mikrokontroler AT89C51 yaitu untuk mengatur timer dan menentukan kecepatan motor dalam pengoperasian pesawat roller mixer. Timer bekerja setelah tombol start/stop ditekan pada rangkaian key pad. 2. Rangkaian display
Rangkaian ini berfungsi untuk menampilkan lamanya waktu dan kecepatan yang dipilih.
3. Rangkaian alarm Rangkaian Display Rangkaian Mikrokontroler AT89C51 Power Supplay
Motor Rangkaian Pengatur Kecepatan Motor
Rangkaian Alarm Rangkaian
Setting Timer
Sebagai indikator pengaman dan untuk mengetahui bahwa proses pencampuran telah selesai.
4. Rangkaian pengatur kecepatan motor
Menentukan pengaturan kecepatan motor sesuai dengan yang ditentukan.
5. Motor
Berfungsi untuk memutar silinder-silinder (roller) yang diputar dan digoyangkan (Proses pengadukan).
6. Sistem mikrokontroler AT89C51 sebagai pengendali utama.
Adapun cara kerja secara keseluruhan dari rangkaian ini adalah sebagai berikut :
Pada saat pesawat dihidupkan, maka mikrokontroler akan mengeksekusi program inisialisasi. Setelah itu mikrokontroler akan menjalankan program untuk memeriksa keadaan switch up atau switch down untuk mensetting timer yang ditampilkan pada display seven segmen. Setelah timer selesai disetting kemudian pesawat akan bekerja setelah menekan tombol srart/stop. Setelah pesawat bekerja, timer akan menghitung mundur lamanya waktu yang telah diatur, bersamaan dengan itu motor penggerak roller-roller mendapat supplay dan bekerja dengan kecepatan yang sudah dipilih sebelumnya (30 rpm atau 40 rpm). Setelah waktu habis, rangkaian kontrol kecepatan motor akan memutuskan supply ke rangkaian pengatur kecepatan motor sehingga motor akan berhenti berputar dan buzzer bekerja.
3.3 Implementasi Rangkaian
Rangkaian-rangkaian yang dipergunakan dalam perancangan sistem ini saling berhubungan antara satu dengan yang lainnya, adapun perancangan sistem rangkaian-rangkaian yang dipergunakan adalah sebagai berikut :
3.3.1 Perancangan Rangkaian Key pad
Key pad pada rangkaian terdiri dari 3 buah tombol push botton. Fungsi dari masing-masing tombol tersebut adalah sebagai berikut:
1 Sw1 (Set UP)
Tombol ini digunakan untuk menaikkan nilai pengaturan timer untuk nilai atas yang dikehendaki. Keluaran dari switch ini akan masuk ke port 1.0 pada AT89C51
2. Sw2 (Set DOWN)
Tombol ini digunakan untuk menurunkan nilai pengaturan timer untuk nilai bawah yang di kehendaki. Keluaran switch ini akan masuk ke port 1.1 pada AT89C51
3. Sw3 (Start/Stop)
Tombol ini digunakan untuk menjalankan dan menghentikan kerja alat. Lamanya alat bekerja sesuai dengan nilai yang telah diatur pada timer, yang nilainya tertera pada rangkaian display. Keluaran dari switch ini akan masuk ke port 1.2 pada AT89C51
Berikut gambar rancangan setting timer :
P1.2 P1.1 P1.0 START SW-DW SW-UP
Gambar 3.2 setting timer
3.3.2 Perancangan Rangkaian Display
Rangkaian ini berfungsi untuk menampilkan nilai lamanya pesawat bekerja dalam satuan waktu. Rangkaian ini akan menampilkan nilai waktu yang telah kita atur pada rangkaian setting timer. Rangkaian ini terdiri dari empat buah seven segmen common anoda berfungsi sebagai penampil yang dikemudikan oleh 1 buah IC 7447 sebagai dekoder dan empat buah transistor PNP yang dirancang sebagai saklar yang akan berfungsi untuk mengaktifkan seven segmen mana yang akan bekerja.
Berikut gambar rancangan rangkaian display : + 5 V + 5 V
.
f d g d c 6 1 3 e 4 a.
g a 1 3 f 9 4 c b e b 8 f 8 a 1 4 1 6 e d d 7 f 2 a 3 c.
g b g e 1 0 3 3 0 1 1.
b 1 2 5 c P 1 . 0 P 1 . 1 P 1 . 2 P 1 . 3 P 1 . 5 P 1 . 4 P 1 . 7 P 1 . 6 C 9 0 1 2 1 3 2 C 9 0 1 2 1 3 2 2 , 2 K 2 , 2 K C 9 0 1 2 1 3 2 7 4 L S 4 7 1 7 2 1 4 2 8 6 B I / R B O 4 R B I 5 L T 3 A 1 3 B 1 2 C 1 1 D 1 0 E 9 F 1 5 G 1 4 2 , 2 K 2 , 2 K C 9 0 1 2 1 3 2Gambar 3.3 Rangkaian display
IC 7447 merupakan dekoder yang akan mengubah 4 bit BCD menjadi analog. alan penggunaannya IC 7447 ini dipasangkan dengan seven segmen tipe common anoda, digit akan aktif jika menerima masukan rendah. Tampilan pada seven segmen sangat bergantung dari kode-kode biner yang masuk melalui inputan IC 7447 pada tabel 3.1, tabel ini akan memperlihatkan hubungan antara masukan pada IC 7447 sebagai dekoder dengan keluaran atau tampilan pada seven segmen.
Tabel 3.1 Hubungan sinyal masukan dan keluaran dekoder IC 74LS47 INPUT OUTPUT BI/RBO - - - -LT RBI A B C D a b c d e f g 0 H H L L L L H L L L L L L H 1 H X L L L H H H L L H H H H 2 H X L L H L H L L H L L H L 3 H X L L H H H L L L L H H L 4 H X L H L L H H L L H H L L 5 H X L H L H H L H L L H L L 6 H X L H H L H H H L L L L L 7 H X L H H H H L L L H H H H 8 H X H L L L H L L L L L L L 9 H X H L L H H L L L H H L L 10 H X H L H L H H H H L L H L 11 H X H L H H H H H L L H H L 12 H X H H L L H H L H H H L L 13 H X H H L H H L H H L H L L 14 H X H H H L H H H H L L L L 15 H X H H H H H H H H H H H H BI X X X X X X L H H H H H H H RBI H L L L L L L H H H H H H H LT L X X X X X H L L L L L L L
Display yang terdiri dari 4 buah seven segmen ini, dalam kerjanya akan aktif secara bergantian dengan kecepatan tinggi selama pesawat dihidupkan. Untuk menentukan digit mana yang akan diaktifkan, maka pengaturannya akan ditentukan oleh mikrokontroler. Pada rangkaian ini direncanakan penggunaan transistor sebagai saklar, dimana saat menerima masukan tinggi dari mikrokontroler akan mentriger basis dan mengaktifkan seven segmen. Cara ini dikenal dengan metode multiplexing, yang artinya hanya satu buah seven segmen yang menyala pada 1 waktu. Namun karena frekuensi multiflexing yang sangat tinggi, maka akan terlihat menyala secara bersamaan.
3.3.3 Perancangan Rangkaian Alarm
Rangkaian ini berfungsi untuk menandakan bahwa lamanya waktu untuk pesawat bekerja telah selesai. Rangkaian ini terdiri dari satu buah transistor yang dirancang sebagai saklar dan satu buah buzzer. Jika waktu yang diset telah habis, mikrokontroler akan memberikan logika low (0) pada Port 2.1 yang dihubungkan dengan rangkaian ini, maka transistor akan bekerja dan buzzer akan berbunyi.
P2.1 +V 5V + -BZ1 PNP 9012 R5 100
Gambar 3. 4 Rangkaian alarm
3.3.4 Perancangan Rangkaian Pengatur Kecepatan Motor
Rangkaian ini berfungsi untuk menentukan kerja atau tidaknya rangkaian pengatur kecepatan motor. Yaitu dengan memutuskan Supply ke rangkaian pengatur kecepatan motor. Bekerjanya rangkaian ini berkaitan dengan lamanya settingan timer. Rangkaian kontrol ini terdiri dari sebuah transistor yang berfungsi sebagai saklar. Pada saat tombol start ditekan maka mikrokontroler mengurangi nilai waktu yang kita set pada saat itu basis pada kaki transistor diberi keluaran low (0) maka relay akan mendapat suplay sehingga relay yang tadinya normali open (NO) berubah menjadi normali close (NC) rangkaian pengatur kecepatan motor mendapat tegangan dan motor akan bekerja. Ketika timer selesai menghitung dan menunjukan nilai 00:00 detik, maka mikrokontroler memberikan keluaran high (1) pada basis transistor NPN dari port 2.5 sehingga transistor tidak bekerja, Tidak bekerjanya transistor mengakibatkan relay tidak mendapatkan
tegangan sehingga relay yang tadinya NC menjadi NO dan rangkaian pengatur kecepatan motor tidak mendapat tegangan dan motor berhenti bekerja.
+ 1 5 5 V
M
3 5 r p m 4 5 r p m R 1 R 2 2 , 2 K 4 , 7 K C 9 0 1 2 L M 3 1 7 V I N 3 A D J 1 V O U T 2 R E L A Y S W T O G L E 7 , 1 K 5 , 6 K P O R T 2 . 0Gambar 3. 5Rangkaian pengaturan kecepatan motor
Rangkaian pengatur kecepatan motor ini berfungsi untuk mengatur kecepatan putaran motor. Rangkaian ini menggunakan IC LM317 sebagai regulator tegangan positif. Dimana kecepatan putaran motor ini diatur dengan cara mengubah nilai tahanan pada variabel resistor. Semakin tahanannya besar, maka kecepatan putaran motor akan semakin berkurang dan semakin kecil nilai tahanan, maka kecepatan putaran motor akan berkurang.
Pada pengaturan tegangan output dari IC LM317, berdasarkan dari data sheet IC LM317 memiliki rumusan sebagai berikut :
1 2 1 25 , 1 R R Vout
Dimana : R1 = Hambatan tetap
R2 = Hambatan yang didapat diubah-ubah
Karena penulis merencanakan motor berputar dengan tegangan maksimum sebesar 15V dan menggunakan R2 sebesar 50 KΩ, maka nilai R1 yang harus digunakan sebesar : 1 2 1 25 , 1 R R Vout 1 25 , 1 2 1 Vout R R 1 25 , 1 15 50000 1 R 11 50000 1 R 4545 1 R
Jadi nilai R1 yang digunakan adalah sebesar 4.7 KΩ.
Setelah didapat nilai R1, penulis mencocokan kecepatan putaran yang direncanakan dengan cara menyeting Variable resistor (R2), di dapat besarnya VR untuk 35 rpm sebesar 5,6 KΩ, sedangkan untuk 45 rpm sebesar 7,1KΩ.
Sehingga besarnya Vout untuk 35 rpm : K K Vout 7 . 4 6 , 5 1 25 , 1 Vout 2,74 untuk 45 rpm : K K Vout 7 . 4 1 , 7 1 25 , 1 Vout 3,14
3.3.5
Perancangan Sistem Minimum Mikrokontroler AT89C51
Sistem minimum mikrokontroler AT89C51 direncanakan penggunanya untuk mengendalikan sistem kerja secara keseluruhan. Untuk mempermudah
pembahasan maka perencanaan sistem minimum dibagi menjadi dua bagian yaitu, perencanaan perangkat keras (hardware) dan perangkat lunak (software).
3.3.5.1 Perencanaan hardware
Perencanaan perangkat keras dari rangkaian mikrokontroler terlihat pada gambar 3.6
Gambar 3. 6 Rangkaian sistem minimum mikrokontroler
3.3.5.2 Perencanan Software
Dalam perencanaan software ini penulis menggunakan hardware AT89C51.
Mikrokontroler ini perlu diisi data berdasarkan flowchart dibawah ini.
Gambar 3. 7 Flowchart roller mixer
Berikut penulis lampirkan pula potongan-potongan program pada kondisi tertentu.
Kondisi-kondisi tersebut antara lain :
a. Pada saat setting timer
Program akan memeriksa switch mana yang ditekan. Jika yang ditekan (sw-up), maka nilai menit pada display akan bertambah satu. Jika yang ditekan (sw-down), maka nilai menit pada display akan berkurang satu. Jika yang ditekan tombol (start), maka mikrokontroler akan menjalankan program selanjutnya. Jika tidak ditekan, maka program akan terus mengulang Cek Switch. Berikut ini adalah potongan dari listing Program setting timer.
;---;1. SUB ROUTINE PENGATURAN TIMER
;---PENGATURAN: JB P1.0,DOWN_COUNTER CLR P2.1 MOV A,R0 ADD A,#01H MOV R0,A CJNE A,#00111101B,LOM_MAK MOV R0,#00H LOM_MAK: UDAH_LOM_UP: JB P1.0,DOWN_COUNTER ACALL TAMPIL JMP UDAH_LOM_UP DOWN_COUNTER: MOV A,R0 CJNE A,#00H,ADA_DOWN JMP PROSES_PENGATURAN_SELESAI ADA_DOWN: JB P1.1,PROSES_PENGATURAN_SELESAI CLR P2.1 MOV A,R0 lii
SUBB A,#01H MOV R0,A UDAH_LOM_DOWN: JB P1.1,PROSES_PENGATURAN_SELESAI ACALL TAMPIL JMP UDAH_LOM_DOWN PROSES_PENGATURAN_SELESAI: MOV A,R0 SETB P2.1 RET
b. Pada saat tombol START ditekan
Pada saat tombol START ditekan maka kejadian yang berlangsung adalah nilai settingan pada display akan berkurang per-detik, rangkaian pengatur kecepatan motor akan bekerja. Berikut adalah potongan listing programnya.
;---; SUB ROUTINE PEMBACAAN TIMER
;---PEMBACAAN_TIMER: ACALL DELAY_500MSS MOV A,R7 ADD A,#01H MOV R7,A CJNE A,#00111100B,PEMBACAAN_SELESAI MOV R7,#00H MOV A,R0 SUBB A,#01H MOV R0,A CJNE A,#00H,PEMBACAAN_SELESAI liii
ABIS: ACALL TAMPIL CLR P2.1 SETB P2.0 JMP ABIS PEMBACAAN_SELESAI: RET
BAB 4
livPENGUJIAN dan ANALISIS
Dalam bab ini penulis akan menerangkan mengenai pendataan yang telah dilakukan mulai perancangan sampai pengujian guna menyelesaikan karya tulis ini. Kemudian menganalisa data-data tersebut untuk dibandingkan dengan teorinya. Bab ini juga memaparkan hasil-hasil pengukuran titik-titik tertentu. Hasil pengukuran ini disusun dalam bentuk tabel pendataan dengan beberapa kondisi perlakuan yang diberikan pada rangkaian sesuai dengan permasalahan yang akan dibahas. Hal ini bertujuan untuk lebih memperlihatkan sejauh mana pengaruh perlakuan dan masukan yang berbeda terhadap kerja rangkaian keseluruhan.
Pengujian dan pengamatan dilaksanakan secara berulang-ulang agar didapat hasil data yang lebih presisi. Keakurasian hasil pendataan banyak dipengaruhi oleh beberapa hal antara lain dari komponen yang kita rakit maupun alat penunjang yang kita gunakan dalam pendataan. Pengujian dan pengamatan disini dilakukan pada keseluruhan sistem yang terdapat dalam paralatan ini.
4.1 Persiapan Alat dan Bahan
Sebelum melakukan pendataan penulis melakukan beberapa persiapan agar dalam pelaksanaannya nanti dapat berjalan dengan semestinya, adapun langkah-langkah persiapan dalam pendataan adalah sebagai berikut:
1. Persiapkan alat dan bahan terlebih dahulu.
2. Sebelum memulai pengukuran, hubungkan terlebih dahulu semua aksesoris yang dibutuhkan pada modul pesawat roller mixer.
3. Berikan supply tegangan PLN pada alat-alat yang mau kita ukur namun, sebelumnya pastikan seluruh blok rangkaian telah terhubung dangan rangkaian power supply (+Vcc, dan ground).
4. Tekan tombol main switch kemudian cek apakah alat telah berjalan dengan baik.
5. Jika sudah, lakukan pengukuran pada titik-titik pengukuran (TP) yang kita tentukan sebelumnya dengan multi meter digital atau analog. 6. Catat hasil dari setiap titik-titik pengukuran dan hitung presentase
kesalahanya.
7. Jika presentase kesalahan kurang dari 5%, modul atau alat yang telah dibuat layak untuk digunakan dan siap untuk diujikan.
4.1.1 Komponen dan Bahan
Daftar komponen dan bahan yang perlu disiapkan sebelum pendataan meliputi :
Tabel 4. 1Komponen dan bahan Rangkaian Power Supply
No Komponen Jumlah
1 Trafo 3 A 1 buah
2 Kabel Supply 1 buah
3 Saklar ON/OFF 1 buah
4 Fuse 5 A 1 buah 5 Dioda 5 A 2 buah 6 Kapasitor 4700µF 1 buah 7 Kapasitor 100 µF 2 buah 8 IC Regulator 7805 1 buah 9 IC Regulator 7815 1 buah 10 Transistor D313 2 buah
Tabel 4. 2 Blok Sistem Minimum Mikrokontroler
No Komponen Jumlah
1 IC AT89C51 1 buah
2 Kristal 12MHz 1 buah
3 Kapasitor 33pF 2 buah
Tabel 4.3 Blok Key Pad
No Komponen Jumlah
1 Push Botton Normally Open 4 buah
2 Resistor 100Ω 1 buah
3 Resistor 8.2KΩ 1 buah
4 Kapasitor 10µF/16V 1 buah
Tabel 4. 4 Blok Disply
No Komponen Jumlah
1 IC 74LS47 1 buah
2 Seven Segmen CA 4 buah
3 Transistor 9012 4 buah
4 Resistor 330Ω 7 buah
5 Resistor 2.2KΩ 4 buah
Tabel 4. 5 Blok Pengatur Kecepatan Putaran Motor dan Buzzer
No Komponen Jumlah 1 IC LM317 1 buah 2 Relay 5 V 1 buah 3 Buzzer 12 V 1 buah 4 Transistor 9012 2 buah 5 Resistor 10KΩ 2 buah 6 Resistor 180Ω 1 buah 7 Resistor 4.7KΩ 1 buah
8 Saklar Togle 1 buah
9 Varieble Resistor 50KΩ 2 buah
10 Motor DC 12 V 1 buah
4.1.2 Persiapan alat
Sebelum melaksanakan pendataan modul, penulis mengadakan beberapa persiapan agar didalam pelaksanaan pendataan dapat berjalan dengan sebagaimana mestinya. Adapun alat yang digunakan adalah sebagai berikut :
1. Seperangkat Tool Set 2. Multimeter Merk : Sanwa Model : YX 360 TRS Buatan : Jepang 3 Multimeter Digital Merk : Cadic Model : 32B 4. Tacho Meter Merk : Sanwa Buatan : Jepang 5. Stop Watch
4.2 Metode Pendataan
Setelah semua bahan dirangkai menjadi modul, maka dilakukan pendataan pada rangkaian untuk diperiksa. Pengukuiran dan pendataan modul pesawat Roller Mixer ini hanya dilakukan dibeberapa titik saja yang dianggap dapat mewakili cara kerja rangkaian secara keseluruhan. Besarnya tegangan pada titik pengukuran diukur dengan nenggunakan Multimeter atau AVO meter.
Adapun titik pengukuran pada rangkaian ini adalah sebagai berikut :
1. Titik pengukuran 1 (TP1)
Merupakan titik keluaran Rangkaian Sistem Minimum Mikrokontroler, tepatnya pada Port 2.1 kaki 22 AT89C51, dimana port tersebut dihubungkan dengan Rangkaian Alarm. Pada TP ini dilakukan pendataan dengan 3 kondisi yaitu, pada saat tombol START belum ditekan, pada saat tombol START ditekan dan pada saat waktu yang diatur habis.
2. Titik pengukuran 2 (TP2)
Merupakan titik keluaran Rangkaian Sistem Minimum Mikrokontroler, tepatnya pada Port 2.0 dimana port tersebut dihubungkan dengan Rangkaian Pengatur Kecepatan Motor. Pada TP ini dilakukan pendataan dengan 3 kondisi yaitu, pada saat tombol START belum ditekan, pada saat tombol START ditekan dan pada saat waktu yang diatur habis.
3. Titik pengukuran 3 (TP3)
Merupakan titik pengukuran pada keluaran LM 317 yang terhubung dengan motor pada keceparan 35 rpm. Pada TP ini dilakukan pendataan
dengan 3 kondisi yaitu, pada saat tombol START belum ditekan, pada saat tombol start ditekan dan pada saat waktu yang diatur habis.
4. Titik pengukuran 4 (TP4)
Merupakan titik pengukuran pada keluaran LM 317 yang terhubung dengan motor pada kecepatan 45 rpm. Pada TP ini dilakukan pendataan dengan 3 kondisi yaitu, pada saat tombol START belum ditekan, pada saat tombol start ditekan dan pada saat waktu yang diatur habis.
5. Selain itu penulis juga melakukan perbandingan waktu operasi pesawat
Roller Mixer dengan cara dibandingkan dengan stop watch yang dilakukan beberapa kali dengan 5 pengaturan waktu yang berbeda, serta perbandingan kecepatan pada settingan dengan putaran yang sebenarnya.
4.3 PENYAJIAN DATA
Pada bagian ini penulis akan menyajikan data dari test point yang telah
disebutkan diatas.
1. TP 1
Tabel 4. 6 Test point 1
Port
Kondisi Sebelum Start Pada saat
bekerja
Pada saat waktu operasi pesawat habis
Port 2..1 4,8 V (High) 4,8 V (High) 0 V (Low)
2. TP 2
Tabel 4. 7 Test point 2
3. TP 3
Tabel 4.8 Test point 3
4. TP 4
Tabel 4.9 Test point 4
5. Hasil Perbandingan Waktu Tabel 4.10 Hasil Perbandingan Waktu
Port
Kondisi Sebelum Start Pada saat
bekerja
Pada saat waktu operasi pesawat habis
Port 2.4 4,8 V (High) 0 V (Low) 4,8 V (High)
Kondisi Sebelum
Start
Pada saat bekerja
Pada saat waktu operasi pesawat habis Vout LM 317 0 V 3,2 V 0 V Kondisi Sebelum Start Pada saat bekerja
Pada saat waktu operasi pesawat habis
Vout LM 317 0 V 3,6 V 0