33
Desain Model Kontrol Governor Dengan Menggunakan
Kontroler PID Di PLTU
Aji Akbar Firdaus1)
1)
Jurusan Teknik Elektro, Universitas Airlangga, Surabaya [email protected]
ABSTRAK
Sistem kelistrikan harus mampu menyediakan tenaga listrik untuk pelanggan dengan frekuensi yang harus konstan. Frekuensi sistem dipengaruhi oleh kebutuhan dari daya aktif pelanggan yang mengakibatkan terjadi perubahan pada frekuensi sistem. Penyediaan daya reaktif harus sesuai dengan kebutuhan untuk mempertahankan frekuensi agar tidak melebihi nominal toleransi yang diperbolehkan. Pengaturan penyediaan daya aktif dilakukan dengan mengatur besarnya kopel mekanis yang diperlukan untuk memutar generator, yakni dengan mengatur pemberian bahan bakar pada gas turbin.
Governor pada tiap unit generator berfungsi sebagai pengatur utama bahan bakar pada unit pembangkit berdasarkan perubahan beban yang terjadi. Karena perubahan beban, dibutuhkan suatu kontroler yang mempunyai respon cepat dan stabil. Dalam sistem ini menggunakan kontroler PID (Proportional-Integrator-Differential). PID merupakan sebuah kontroler yang digunakan untuk mengontrol governor agar mempunyai respon cepat, dan stabil, serta frekuensi yang dihasilkan tidak melebihi batas toleransi yang ± 5 %.
Keyword – governor, generator, PID
I. PENDAHULUAN
Seiring dengan kemajuan teknologi dan peningkatan jumlah penduduk maka kebutuhan akan energi listrik juga akan meningkat. Akibatnya beban akan meningkat juga. Dengan adanya peningkatan beban ini maka akan menyebabkan sering terjadinya perubahan beban yang nantinya akan berpengaruh pada pasokan listrik yang akan disalurkan. Akibat adanya pengaruh pasokan ini maka akan mempengaruhi output dari generator.
Suatu alat untuk mengatur kecepatan dari sebuah generator adalah governor. Governor mempunyai fungsi mengatur kecepatan putaran poros keluaran pada mesin penggerak mula yang dipasang alat pengatur ini[1]. Sehingga bisa diperoleh kecepatan putaran poros keluaran yang stabil, meskipun beban yang ditanggung oleh mesin tersebut bervariasi dan berubah-ubah. Dengan adanya perubahan beban ini maka diperlukan kontroler yang dapat mengontrol governor agar dapat bekerja secara cepat dan stabil.
Akibat dari perubahan beban ini maka governor diharapkan dapat memberikan respon dengan cepat dan diharapkan sistem tetap stabil. Maka diperlukan sebuah kontroler yang dapat mengatur governor tersebut. Kontroler yang dipakai dalam makalah ini adalah kontroler PID. Kontroler PID merupakan sebuah kontroler sederhana, yang dapat diimplementasikan dengan menggunakan rangkaian elektronika analog. Dengan adanya PID ini maka diharapkan kerja dari governor ini dapat bekerja
34 dengan cepat, stabil dan frekuensi yang dihasilkan tidak melebihi batas toleransi yang diinginkan.
II. LANDASAN TEORI A. Gavernor
1. Pengaturan Frekuensi dan Daya Aktif
Daya aktif berhubungan erat dengan frekuensi sistem. Penyediaan daya aktif harus disesuaikan dengan kebutuhan beban. Penyesuaian tersebut dilakukan dengan mengatur kopel penggerak generator, sehingga tidak akan terjadi pemborosan daya aktif.
Pada umumnya generator yang dipakai adalah generator sinkron tiga fasa sebagai pembangkit utama[4]. Oleh karena itu frekuensi yang dihasilkan tergantung dari karakteristik generator sinkron tersebut. Menurut Hukum Newton memiliki hubungan antara kopel mekanik penggerak generator dengan perputaran generator :
(TG-TB)=H x (1)
Dimana :
TG = Kopel penggerak generator
TB = Kopel beban yang membebani generator
H = momen inersia dari generator beserta mesin penggeraknya = kecepatan sudut perputaran generator
Jadi frekuensi akan turun jika daya aktif yang dibangkitkan tidak mencukupi kebutuhan beban, begitu pula sebaliknya frekuensi akan naik jikaterdapat kelebihan daya aktif dalam sistem. Secara matematis apabila :
(TG-TB) = ΔT < 0 maka
< 0 ,
sehingga frekuensi turun (2)
(TG-TB) = ΔT > 0 maka
> 0 ,
sehingga frekuensi naik (3)
2. Prinsip Kerja Governor
Turbin uap dilengkapi dengan frequency control yang merupakan alat untuk mengontrol valve. Valve berfungsi untuk mengontrol kapasitas uap/bahan bakar ketika frekuensi berubah akibat adanya perubahan beban. Pengertian ini dikenal dengan speed governor.
Turbin Uap dilengkapi dengan frequency control dan merupakan peralatan pengaturan control valve. Control valve akan membuka untuk menambah kapasitas Uap/ Bahan bakar ketika frekuensi turun dari nominal atau sebaliknya, akan menutup untuk mengurangi kapasitas Uap/ Bahan bakar ketika frekuensi naik. Pengertian ini umum dikenal speed governor. Type governor antara lain , MHC( Mechanic Hydraulic Control ) dan EHC ( Electric Hydrolic Control )[4].
35
B. Pemodelan Sistem Kelistrikan PLTU
1. Pemodelan Matematika Sistem Pembangkit Listrik pada PLTU
Gambar 1 dan 2 merupakan representasi dari sistem Pembangkit Listrik Tenaga Uap (PLTU)[2].
Gambar 1. blok diagram sistem PLTU dengan reheat steam turbine[2]
Gambar 2. blok diagram sistem PLTU dengan non- reheat steam turbine[2] 2. Pemodelan Sistem Governor pada PLTU menggunakan Matlab Simulink
Gambar 3 merupakan gambar simulasi ketika free governor di-lock. Maka untuk pengaturan beban ketika terjadi perubahan frekuensi yang bekerja adalah kontrol beban menggunakan load limit. Artinya ketika terjadi penurunan atau kenaikan frekuensi dan berdampak pada penurunan atau kenaikan beban dibatasi nilainya. Ketika nilainya sudah mencapai batas limit yang ditentukan, maka governor control yang bekerja. Sistem pengaturan beban seperti ini dinamakan mode operasi load limit dengan lintasan governor otomatis.
36 Gambar 3 Simulink sistem tanpa PID
Dengan adanya penambahan kontroler PID ini diharapkan sistem dan grafik yang dihasilkan oleh hasil simulasi dapat cepat, stabil dan frekuensi yang dihasilkan tidak melebihi batas toleransi yang ditentukan.
C. Kontroler PID
Adanya kontroler PID mempunyai pengaruh yang sangat besar terhadap sistem. Pada prinsipnya hal itu disebabkan oleh tidak dapat diubahnya komponen penyusun sistem tersebut. Artinya bahwa sebuah plant tidak dapat diubah sehingga perubahan dilakukan melalui penambahan suatu sub sistem yaitu dengan kontroler.
Salah satu fungsi dari kontroler adalah mereduksi sinyal kesalahan, yaitu perbedaan antara sinyal setting dan sinyal aktual dari sistem. Tujuan dari sistem kontrol adalah untuk mendapatkan sinyal aktual yang diinginkan sesuai dengan sinyal setting. Semakin cepat reaksi sistem mengikuti sinyal aktual dan semakin kecil kesalahan yang terjadi, sehingga semakin baik kinerja sistem kontrol yang diterapkan.
Apabila perbedaan antara nilai setting dengan nilai keluaran besar, maka kontroler yang benar seharusnya mampu mengamati perbedaan ini untuk segera menghasilkan sinyal keluaran untuk mempengaruhi plant. Dengan demikian sistem secara cepat mengubah keluaran plant sampai diperoleh selisih antara setting dengan besaran yang diatur sekecil mungkin.
Dalam kontroler PID terdapat parameter-parameter yang harus ditentukan. Parameter-parameter tersebut adalah Kp, τi, τd. Dimana Kp merupakan komponen dari kontroler Proporsional, τi merupakan komponen dari kontroler integrator dan τd merupakan komponen dari kontroler diferensial[3].
37 Kp = (4) τi = τ (5) Gain = (6)
Pada sistem terdapat beberapa orde yaitu sistem orde 1, orde 2 dan orde lebih dari 2. Pada sistem tersebut terdapat parameter-parameter di setiap ordenya. Untuk orde 1 terdapat parameter seperti persamaan 7. Untuk parameter orde 2 atau lebih terdapat parameter seperti persamaan 8.
Parameter: K,τ (7) Parameter: K, ζ, n (8)
Setiap kekurangan dan kelebihan dari masing-masing kontroler P, I dan D dapat saling menutupi dengan menggabungkan ketiganya secara paralel menjadi kontroler proposional plus integral plus diferensial (kontroller PID). Elemen-elemen kontroller P, I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar[3].
Berikut ini merupakan langkah-langkah untuk mendesain kontroler PID : 1. Menentukan fungsi alih dari plant
2. Menentukan spesifikasi performasi respon orde yang diinginkan 3. Menentukan Kp, τi, τd τ (9) τ (10) τ (11)
Gambar 4 Blok diagram kontroler PID[3]
Gambar 4 merupakan Blok diagram kontroler PID. Penalaan parameter kontroler PID (Proporsional Integral Diferensial) selalu didasari atas tinjauan
38 terhadap karakteristik yang diatur (Plant). Dengan demikian betapapun rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih dahulu sebelum penalaan parameter PID itu dilakukan. Karena penyusunan model matematik plant tidak mudah, maka dikembangkan suatu metode eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu perubahan. Dua metode pendekatan eksperimen adalah Ziegler-Nichols dan metode Quarter decay.
III. PEMBAHASAN DAN ANALISA
Dari hasil simulasi dengan unit step maka didapatkan gambar dari sinyal output dari plant adalah seperti gambar 6. Setelah mendapatkan gambar output plant maka akan dilakukan identifikasi plant agar persamaan plant tidak rumit. Hasil dari identifikasi plant dapat dilihat pada gambar 5.
Gambar 5 Hasil perhitungan sistem tanpa PID
Gambar 6 Hasil Simulasi sistem dengan unit step
Dari hasil perhitungan untuk menentukan parameter-parameter PID yaitu Kp, τi, τd. Maka didapatkan nilai dari Kp, τi, τd adalah:
Kp = 4 τi = 11.7 τd = 1.13
39
parameter-parameter ini yang akan dimasukkan kedalam simulink dari kontroler PID.
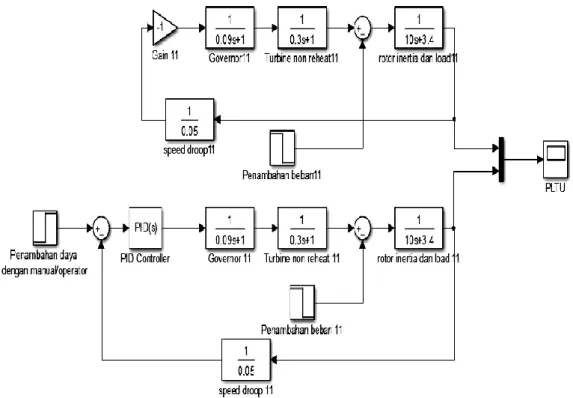
Gambar 7 merupakan gambar simulink dari sistem yang dibuat dan dengan adanya penambahan PID. PID diletakkan sebelum sinyal masuk ke governor agar frekuensi yang dihasilkan tidak melebihi batas toleransi yang ditentukan.
Gambar 7 Simulink sistem dengan PID
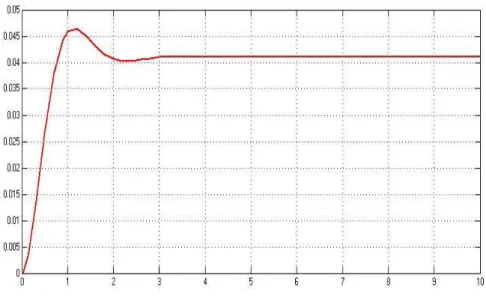
Gambar 8 merupakan gambar hasil running simulink sistem dengan PID. Pada gambar garis hitam menunjukkan apabila sistem ditambah dengan beban sehingga terlihat bahwa frekuensi akan menurun. Pada gambar garis merah menunjukkan apabila sistem ditambah dengan beban sehingga terlihat bahwa frekuensi akan menurun tetapi masih dalam batas toleransi frekuensi yang ditentukan yaitu ± 5 % .
40 Gambar 8 Hasil Simulasi sistem dengan PID
IV. KESIMPULAN
1. Dari hasil simulasi sistem PLTU tanpa PID didapatkan frekuensi yang dihasilkan melebihi toleransi yang ditentukan yaitu sebesar ± 5 %.
2. Dengan adanya PID, maka didapatkan frekuensi yang kurang dari ± 5 % dengan kecepatan dan kestabilan dalam mencapai steady state yang hampir sama.
DAFTAR PUSTAKA
[1] Imam Robandi, Modern Power Sistem Control, ANDI Publisher, 2009 [2] Imam Robandi, Desain Sistem Tenaga Modern, ANDI Publisher, 2006
[3] Desain Kontroler Proporsional Ditambah Integral Ditambah Differensial (PID), Diktat Sistem Pengaturan, 2005
[4] Patriandari, Analisis Pengoperasian Speed Droop Governor Sebagai Pengaturan Frekuensi Pada Sistem Kelistrikan PLTU Gresik, Tugas Akhir ITS, 2010
![Gambar 1 dan 2 merupakan representasi dari sistem Pembangkit Listrik Tenaga Uap (PLTU)[2]](https://thumb-ap.123doks.com/thumbv2/123dok/4134720.2821670/3.892.197.739.268.542/gambar-representasi-sistem-pembangkit-listrik-tenaga-uap-pltu.webp)
![Gambar 4 Blok diagram kontroler PID[3]](https://thumb-ap.123doks.com/thumbv2/123dok/4134720.2821670/5.892.209.753.682.1053/gambar-blok-diagram-kontroler-pid.webp)