1907
PERANCANGAN PID KONTROL MENGGUNAKAN
DIRECT SYNTHESIS DAN INTERNAL MODEL CONTROL (IMC) PADA LEVEL SURGE DRUM
Ayu Wulandari1, Roni Heru Triyanto1, Astrie Kusuma Dewi1*
1Teknik Instrumentasi Kilang, Politeknik Energi Dan Mineral Akamigas, Jl. Gajahmada No, 38 Cepu, Blora 58315
*E-mail: [email protected]
ABSTRAK
Condensate Surge Drum 16-C-1A merupakan alat separasi minyak dan gas bumi yang bekerja menggunakan tekanan tinggi untuk memisahkan fase gas, air dan minyak. Proses pengendalian level pada Condensate Surge Drum ini bertujuan untuk menjaga level tetap berada pada set point yang telah ditentukan agar tidak terjadi liquid carry over atau gas carry over pada produk yang dihasilkan.
Untuk menjaga supaya ketinggian level tetap stabil, dibutuhkan tuning controller yang paling efektif dan compatible, dalam penelitian ini digunakan dua metode tuning yaitu direct synthesis dan Internal Model Control (IMC). Kedua metode ini digunakan untuk melakukan perbandingan karakteristik grafik respon sistem yang dihasilkan. Sehingga dapat diketahui metode tuning mana yang paling baik.
Software MatLab Simulink digunakan untuk melihat karakteristik dari grafik keluaran sistem, kemudian diimplementasikan pada software Labview. Dari hasil perhitungan, simulasi dan analisis, didapatkan hasil bahwa desain IMC dan DS lebih baik jika dibandingkan dengan nilai PI dari aktual lapangan dan hasil desain dengan ZN. Hasil desain dengan IMC dan DS didapatkan respon dengan settling time sebesar 74 detik, rise time 36,43 detik, 𝐸𝑆𝑆 = 0,05% dan zero overshoot. Sedangkan desain dengan metode ZN memiliki settling time sebesar 322,5 detik, rise time 24,22 detik, 𝐸𝑆𝑆 = 0,2%
dan overshoot sebesar 14,5%. Adapun PI aktual memiliki respon dengan settling time sebesar 74,5 detik, rise time sebesar 5,13 detik 𝐸𝑆𝑆 = 0,3% serta memiliki overshoot 51,52%.
Kata Kunci: PID, Direct Synthesis, Internal Model Control, Level
1. PENDAHULUAN
Di era globalisasi sekarang, perkembangan teknologi dan ilmu pengetahuan semakin berkembang. Sama halnya dengan teknologi dalam industri yang terus berkembang mengikuti perubahan zaman. Adanya perkembangan teknologi yang pesat ini maka harus seimbang dengan pengetahuan manusia. Pengetahuan dan soft skill merupakan komponen sangat penting yang harus dimiliki oleh orang yang berminat terhadap industri untuk menjalankan suatu proses sehingga mendapatkan hasil produksi sesuai dengan yang di harapkan.
Agar proses tersebut berjalan sesuai dengan yang diinginkan, salah satu fungsi dari instrumentasi yang sangat penting untuk di terapkan yaitu pengendalian atau control, dimana besaran fisis yang terukur kemudian dikendalikan agar nilainya sesuai dengan yang di harapkan. Sehingga membutuhkan equipment yang dapat mendukung proses tersebut.
Dalam hal ini pengendalian dilakukan pada Surge drum 16-C-1A. Surge drum merupakan separator horizontal 3 phase, berfungsi untuk melakukan pemisahan antara air, minyak dan gas. Air dan minyak akan keluar dari outlet yang terpisah dengan gas, dan menghasilkan masing-masing produk yang berbeda pula [1]. Dengan melihat fungsi dari surge drum 16-C- 1A tersebut bahwa alat ini termasuk alat vital, sehingga untuk mencapai sasaran tersebut fungsi instrumentasi sangat penting yaitu sebagai sistem pengendalian level yang dapat menunjang kelancaran dan kelangsungan operasinya.
1908
Pengendalian level pada separator untuk menjaga supaya level pada knock out drum tetap berada pada set point yang telah ditentukan [1]. Apabila kurang dari set point maka dapat menyebabkan liquid carry over atau fuel gas akan terbawa ke outlet condensate. Sehingga fase minyak terikut pada fase air. Menyebabkan proses selanjutnya menjadi terganggu dan dapat merusak peralatan proses. Disamping itu harga level pada knock out drum tidak boleh melebihi set point karena akan terjadi gas carry over atau condensate terbawa ke outlet fuel gas [2].
Berdasarkan latar belakang dan tinjauan penelitian sebelumnya pada penelitian ini dilakukan perancangan PID kontrol menggunakan metode tuning Direct Sintesis dan Internal Model Controller (IMC) pada level surge drum 16-C-1A. Dengan membandingkan karakteristik domain waktu dan hasil simulasi dari semua strategi kontrol menggunakan desain kontrol dan memanfaatkan software labView [3]. Software Labview digunakan juga di penelitian yang telah dilakukan sebelumnya untuk melakukan monitoring level dan temperature pada proses blending[4].
2. METODE
Pada penelitian ini menggunakan metode pengumpulan data yang didapat dari data operasi lapangan dan studi literatur. Data operasi lapangan yang digunakan yaitu data-data terkait sistem pengendalian level pada condensate surge drum 16-C-1A, nilai set point (SP), parameter kontroler PID, Piping and Instrument Diagram (P&ID) dan Process Flow Diagram (PFD), serta Data sheet element sistem pengendaliannya [5].
Sistem pengendalian level pada surge drum 16-C-1A dibutuhkan agar ketinggian level condensate dapat terjaga sesuai dengan set point-nya. Untuk mengendalikan level sesuai dengan set point, bukaan valve 16-LCV-1A dikontrol oleh PID controller 16-LIC-1A. Sinyal yang diterima oleh controller kemudian dibandingkan dengan nilai set point. Apabila terdapat error dari perhitungan, maka controller akan melakukan evaluasi atau perbaikan keadaan error dengan cara menambah atau mengurangi bukaan dari control valve. Sinyal output yang keluar dari 16-LIC-1A berupa sinyal standar 4-20 mA yang dikirimkan ke control valve agar melakukan koreksi terhadap error [6]. sebelum masuk ke control valve Sinyal 4-20 mA dikonversi menjadi sinyal pneumatic 3-15 psi oleh I/P transducer sebagai input untuk control valve. Sehingga control valve dapat melakukan aksi perbaikan dengan menambah atau mengurangi bukaan valve[2].
Ketika nilai PV melebihi nilai dari set point maka manipulated variable akan bertambah, dan bukaan valve 16-LCV-1A akan bertambah untuk mengurangi level pada knock out dari surge drum 16-C-1A hingga ketinggian level mencapai nilai set point atau kembali stabil.
Begitu pula sebaliknya ketika nilai PV kurang dari set point maka manipulated variable akan berkurang, sinyal yang diperintahkan controller untuk control valve juga kecil sehingga bukaan valve 16-LCV-1A juga berkurang dan ketinggian level pada surge drum akan menyesuaikan[2].
Hasil perhitungan fungsi alih dari tiap-tiap elemen kontrol yang digunakan pada sistem pengendalian level condensate surge drum 16-C-1A sebagai berikut[2].
Gc(s) = 200𝑆 +1
20𝑆 ... (1) Gcv (s) = 0.125
5.715𝑠 + 1 ... (2) GProses(s)= 5.95
7,799 s ... (3) GT(s)= 1 ... (4)
1909
A. Metode Direct Sintesis
Dalam melakukan perancangan kontroler PID, diharapkan suatu plant orde kedua dengan PID controller‘menghasilkan suatu sistem dalam bentuk orde pertama.
Persamaan 5 berikut merupakan transfer function plant orde kedua dan persamaan 6 merupakan bentuk orde pertama yang diinginkan[3].
𝐶(𝑠) 𝑈(𝑠) = 𝐾
𝑠(𝑇𝑠+1) ... (5)
𝐶(𝑠) 𝑅(𝑠) = 𝐾∗
𝜏∗ 𝑠+1 ... (6) Dimana 𝜏∗ dan 𝐾∗ merupakan nilai konstanta waktu dan gain overall dari sistem.
Sehingga nilai 𝜏∗ dan 𝐾∗ yang didapatkan adalah:
𝜏∗ = 1
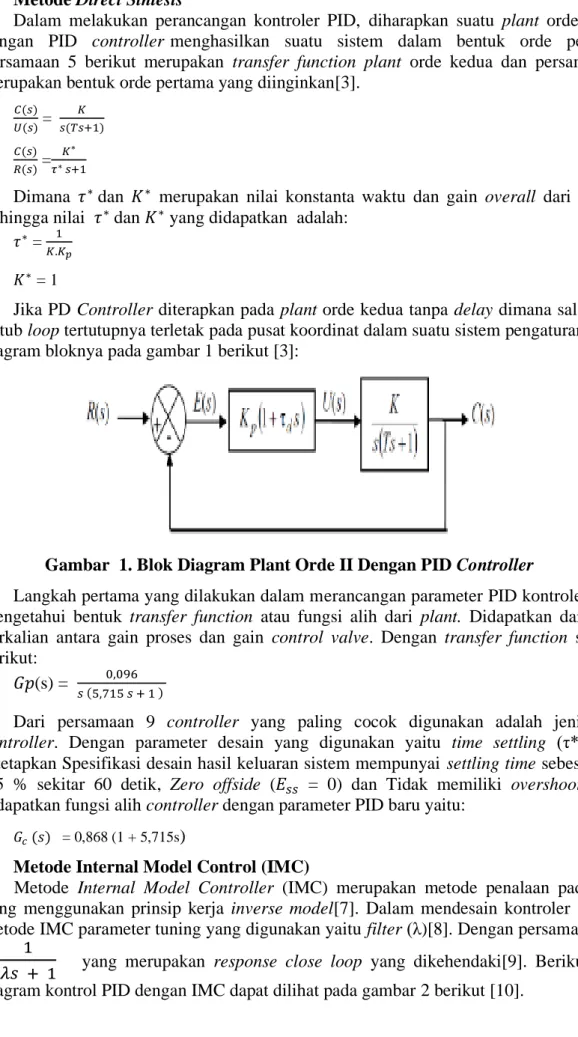
𝐾.𝐾𝑝 ... (7) 𝐾∗ = 1 ... (8) Jika PD Controller diterapkan pada plant orde kedua tanpa delay dimana salah satu kutub loop tertutupnya terletak pada pusat koordinat dalam suatu sistem pengaturan maka diagram bloknya pada gambar 1 berikut [3]:
Gambar 1. Blok Diagram Plant Orde II Dengan PID Controller
Langkah pertama yang dilakukan dalam merancangan parameter PID kontroler yaitu mengetahui bentuk transfer function atau fungsi alih dari plant. Didapatkan dari hasil perkalian antara gain proses dan gain control valve. Dengan transfer function sebagai berikut:
𝐺𝑝(s) = 0,096
𝑠 (5,715 𝑠 + 1 ) ... (9) Dari persamaan 9 controller yang paling cocok digunakan adalah jenis PID controller. Dengan parameter desain yang digunakan yaitu time settling (τ*). Jika ditetapkan Spesifikasi desain hasil keluaran sistem mempunyai settling time sebesar 𝑡𝑠 ± 0,5 % sekitar 60 detik, Zero offside (𝐸𝑠𝑠 = 0) dan Tidak memiliki overshoot maka didapatkan fungsi alih controller dengan parameter PID baru yaitu:
𝐺𝑐 (𝑠) = 0,868 (1 + 5,715s) ... (10) B. Metode Internal Model Control (IMC)
Metode Internal Model Controller (IMC) merupakan metode penalaan pada PID yang menggunakan prinsip kerja inverse model[7]. Dalam mendesain kontroler dengan metode IMC parameter tuning yang digunakan yaitu filter (λ)[8]. Dengan persamaan f (s)
= 1
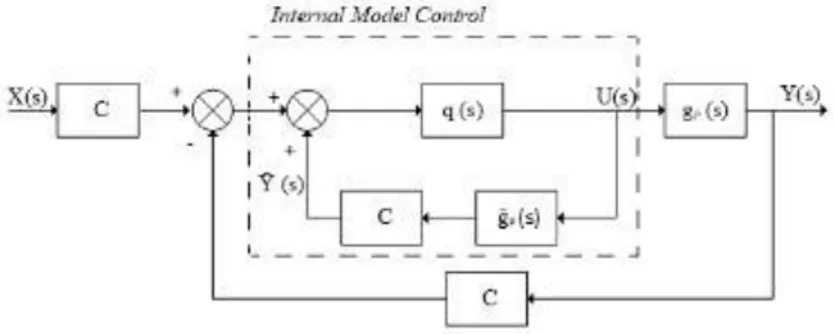
𝜆𝑠 + 1 yang merupakan response close loop yang dikehendaki[9]. Berikut blok diagram kontrol PID dengan IMC dapat dilihat pada gambar 2 berikut [10].
1910
Gambar 2. Blok Diagram PID-IMC
Merancang parameter kontroler PID menggunakan metode Internal Model Control (IMC) harus menentukan transfer function plant terlebih dahulu. Dimana transfer function model plant yang dibutuhkan dalam bentuk inverse. Fungsi alih inner loop untuk metode‘IMC‘adalah:
𝑔𝑐 (s) = 𝑞 (𝑠)
1− 𝐶. 𝑞(𝑠).𝑔̃𝑝 (𝑠) ... (11)
Dimana
q (s) = 𝑠(𝜏𝑝 𝑠+1)
𝑘𝑝 (𝜆𝑠 + 1) ... (12) 𝑔̃𝑝 (𝑠) = 𝑘𝑝
𝑠(𝜏𝑝 𝑠+1) ... (13) 𝑔𝑝−1 (s) = 𝑠(𝜏𝑝 𝑠+1)
𝑘𝑝 ... (14)
Dengan melakukan subtitusi persamaan 12, 13, dan 14 ke persamaan 11 didapatkan persamaan baru
𝑔𝑐 (s) = ( 1
𝐶.𝑘𝑝. 𝜆 ) (𝜏𝑝 𝑠 + 1) ... (15)
Maka
kp = 1
𝐶.𝑘𝑝. 𝜆 ... (16) 𝜏𝐷 = 𝜏𝑝 ... (17)
Jika dipilih nilai lamda (𝜆 ) adalah 12, maka didapatkan fungsi alih controller dengan parameter PID baru yaitu:
𝑔𝑐 (s) = 0,868 (5,715 s +1) ... (18)
3. PEMBAHASAN
Simulasi aktual lapangan dan hasil desain menggunakan empat kondisi tipe kontroler proses yaitu kontroler PID aktual lapangan, kontroler PID hasil desain dengan metode Direct Synthesis, PID hasil desain dengan metode Internal Model Control (IMC) dan PID hasil desain dengan metode Ziegler Nichols. Berikut ini parameter kontroler hasil desain yang sudah didapatkan disajikan pada tabel 1:
Tabel 1. Parameter Kontrol Hasil Desain
Kondisi Kontroler
P I D
Aktual 10 200 -
IMC 0,868 - 5,715
DS 0,868 - 5,715
ZN 0,73 100 -
1911
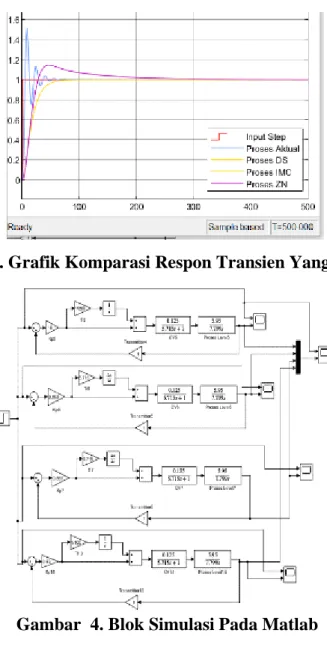
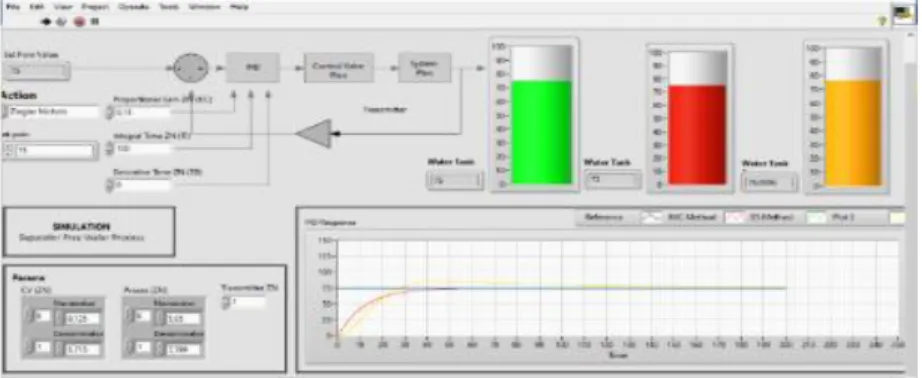
Dari masing-masing parameter kontroler tersebut dilakukan pengujian dengan menggunakan software MatLab dan di Implementasikan pada software Labview[11]. gambar 3 dan 4 berikut ini merupakan blok simulasi yang digunakan dan grafik respon transient yang dihasilkan.
Gambar 3. Grafik Komparasi Respon Transien Yang Dihasilkan
Gambar 4. Blok Simulasi Pada Matlab
Parameter karakteristik respon yang dihasilkan disajikan pada tabel 2 berikut ini:
Tabel 2 Respon Transient dari masing-masing model kontroler
Parameter Aktual Simulasi Direct Synthesis IMC ZN
Settling Time 74,5 74 74 322,5
Rise Time 5,13 36,43 36,43 24,22
Overshoot 51.52% 0 0 14,5%
Error Steady State 0,3% 0,05% 0,05% 0,2%
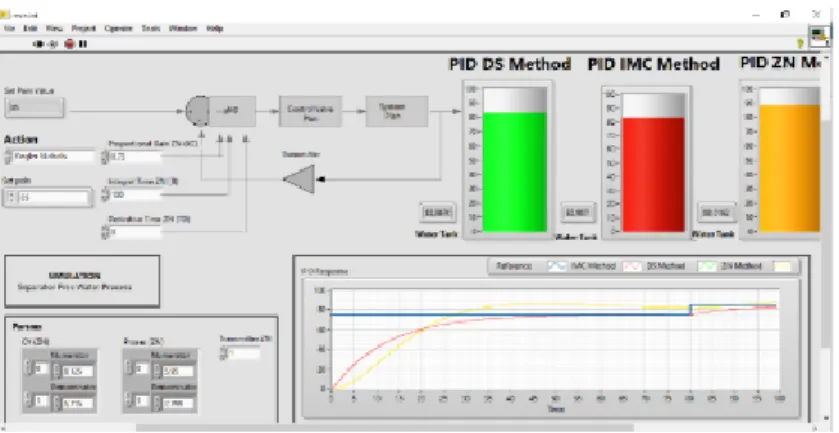
Kemudian dengan memasukkan nilai parameter kontroler hasil desain yang ada pada tabel 1 ke software Labview yang sudah dibuat program sebelumnya, sehingga didapatkan hasil simulasi seperti pada gambar 5, dan grafik respon transien disajikan pada tabel 3.
1912
Gambar 5. Tampilan Simulasi Pada HMI Labview
Tabel 3, Respon Transien Masing-Masing Kontroler Hasil Simulasi Labview
Parameter Direct Synthesis IMC ZN
Settling Time 73,8 73,8 321
Rise Time 36 36 24
Overshoot 0 0 15%
Error Steady State 0,05% 0,05% 0,19%
Dalam pengujian nilai setting point dinaikkan sebesar 10% dari yang semula 75%
menjadi 85%. Tabel 4 merupakan hasil simulasi Ketika setting point dinaikkan.
Tabel 4. Respon Transien Hasil Simulasi MatLab Ketika SettingPoint Diatur Naik
Parameter DS IMC ZN
Settling Time 71,4 71,4 319,6
Rise Time 35,5 35,5 24
Overshoot 0 0 0
Error Steady State 0,0005% 0,0005% 0,06%
Kemudian dilakukan simulasi dengan Labvew hasilnya seperti gambar 6 dengan karakteristik respon transien yang dihasilkan pada tabel 5.
Tabel 5. Respon Transien Hasil Simulasi Labview Ketika Setting Point Naik
Parameter DS IMC ZN
Settling Time 70 70 320
Rise Time 35 35 24
Overshoot 0 0 6,2%
Error Steady State 0,0005% 0,0005% 0,061%
1913
Gambar 6. Tampilan Simulink Labview Ketika Setting Point Diatur Naik
Pengujian selanjutnya dilakukan dengan menurunkan nilai setting point sebesar 10% dari yang semula 75% menjadi 65%. Hasil simulasi ditunjukan pada tabel 6 dengan karakteristik respon yang dihasilkan pada tabel 6.
Tabel 6. Respon Transien Hasil Simulasi MatLab Ketika Setting Point Turun
Parameter Direct Synthesis IMC ZN
Settling Time 70 70 320
Rise Time 35 35 24
Overshoot 0 0 6,2%
Error Steady State 0,0005% 0,0005% 0,061%
Kemudian dilakukan simulasi dengan menggunakan software Labview dan didapatkan hasil seperti pada tabel 7 berikut beserta respon transien yang didapat
Tabel 7. Respon Transien Hasil Simulasi Labview
Parameter Direct Synthesis IMC ZN
Settling Time 70 70 320
Rise Time 35 35 24
Overshoot 0 0 6,2%
Error Steady State 0,0005% 0,0005% 0,061%
Setelah dilakukan desain dengan kedua metode tersebut, hasil terbaik yang dilakukan uji kestabilan. Dalam hal ini digunakan metode kestabilan nyquist[12]. Antara DS dan IMC didapatkan parameter kontroler yang sama yaitu Kp sebesar 0,868 dan Ki sebesar 5,715. Blok diagram seperti pada gambar 8 berikut.
Gambar 8. Blok Diagram Hasil Desain DS dan IMC
1914
Uji kestabilan sistem dengan metode nyquist dibutuhkan transfer function dari Open loop dan persamaan karakteristik. Setelah dilakukan perhitungan didapatkan persamaan gain Open loop dan karakteristik sebagai berikut
G𝑜𝑙 = 3,689 𝑠 + 0,6456
44,57 𝑠2 + 7,799 𝑠 ... (19) G𝑝𝑘 = 44,57 𝑠2 + 11,488 𝑠 + 0,6456
44,57 𝑠2 + 7,799 𝑠 ...(20)
Letak pole dan zero dapat ditentukan dengan cara manual melalui akar nominator/denumerator di MatLab. Dengan menuliskan persamaan gain open loop (Gol) pada commond window. Kemudian menggunakan fungsi pzmap sehingga letak pole dan zero dapat diketahui. Dari hasil simulasi didapat bahwa tidak ada pole yang terletak disebelah kanan bidang imajiner. Sehingga sesuai dengan kriteria kestabilan Nyquist yang pertama yaitu sistem stabil.
4. SIMPULAN
Berdasarkan data hasil simulasi dengan software Matlab didapatkan kontroler hasil desain DS dan IMC dengan nilai Kp dan Ki sama yaitu 0,868 dan 5,17 yang memiliki settling time = 74,5 detik, Rise Time = 36,43 detik, dengan zero overshoot dan error steady state sebesar 0,05% dan hasil simulasi dengan Labview didapatkan nilai settling time = 73,8 detik, Rise Time = 36 detik, dengan zero overshoot dan error steady state sebesar 0,05%. Pada penelitian ini menggunakan dua metode yaitu Direct Synthesis dan Internal Model Control (IMC). Penerapan metode uji kestabilan Nyquist belum di implementasikan pada Software Labview, hanya sebatas perhitungan secara teoritis. Untuk perbaikan yang akan datang bisa ditambahkan fungsi uji kestabilannya.
5. DAFTAR PUSTAKA
[1] P. T. Job, P. T. Dengan, T. Paramater, and M. Syauqi, “Perancangan Sistem Pengendalian Level Minyak Pada Separator ( Pv 9900 ) Kontroler Proportional Integral Menggunakan,”
no. Pv 9900.
[2] “PERHITUNGAN ULANG PARAMETER CONTROLLER PADA LEVEL CONTROL SYSTEM CONDENSATE SURGE DRUM 16-C-1A DENGAN METODE DIRECT SYNTHESIS DI PT . BADAK NGL CO . BONTANG.”
[3] D. Kontroler, P. Ditambah, P. Kontroler, D. Kontroler, and P. D. Kontroler, “Dan Waktu Differensial Τ,” pp. 1–5.
[4] A. K. Dewi, A. A. B. A. Sahaya, and W. Sugiman, “Level and Temperature Monitoring System in Blending Process Using Zigbee Wireless Sensor Network,” vol. 436, pp. 372–375, 2020, doi: 10.2991/assehr.k.200529.077.
[5] A. Heriyanto, Teknik Pemodelan. Cepu, PEM Akamigas, 2019.
[6] A. Heriyanto, Instrumentasi dan Pengukuran. Cepu, PEM Akamigas, 2016.
[7] X. F. Li, D. J. Ding, Y. G. Wang, and Z. Huang, “Cascade IMC-PID Control of Superheated Steam Temperature based on Closed-loop Identification in the Frequency Domain,” IFAC- PapersOnLine, vol. 49, no. 18, pp. 91–97, 2016, doi: 10.1016/j.ifacol.2016.10.145.
[8] D. E. Rivera and M. E. Flores, “SA NE M SC PL O E – C EO PL O E –,” vol. II.
[9] A.-V. Duka, M. Dulău, and S.-E. Oltean, “IMC Based PID Control of a Magnetic Levitation System,” Procedia Technol., vol. 22, no. March, pp. 592–599, 2016, doi:
10.1016/j.protcy.2016.01.125.
[10] P. Energi, D. A. N. Mineral, K. Energi, D. A. N. Sumber, and D. Mineral, “KONTROLER
1915
PID – INTERNAL MODEL CONTROL Kontroler.”
[11] S. Umamaheswari, V. Palanisamy, and M. Chidambaram, “Direct synthesis Method - Based Controller Design for Cold Rolling Mill,” Int. J. Control Autom., vol. 3, no. 2, pp. 1–8, 2010.
[12] “Institut Teknologi Sepuluh Nopember - Surabaya MATERI Kriteria Kestabilan Nyquist.”
DAFTAR SIMBOL
P : Kontroler Proportional
PD : Kontroler Proportional Derivative PI : Kontroler Proportional Integral
PID : Kontroler Proportional Integral Derivative DS : Metode Tuning Kontroler Direct Synthesis IMC : Metode Tuning Kontroler Internal Mode Control ZN : Metode Tuning Kontroler Ziegler Nichols Ti : Konstanta Integral (s)
Td : Konstanta Derivative (s) 𝜏∗ : nilai Setling time
λ : Filter Factor
𝐾∗ : gain overall
q (s) : Fungsi alih kontrol IMC
Gp (s) : Fungsi alih plant (control valve dan proses) 𝐺̃ (s) 𝑃 : Fungsi alih model plant (control valve dan proses) Gc (s) : Fungsi alih kontrol PD-IMC
Y (s) : Hasil keluaran proses PD-IMC 𝑌̃ (s) : Hasil keluaran proses IMC
PFD : Process Flow Diagram
P&ID : Piping And Instrument Diagram
Kcr : Critical Value
Gc(s) : Transfer function dari Controller Gcv (s) : Transfer function dari Control Valve GProses(s) : Transfer function dari Plant Process GT(s) : Transfer function dari Transmitter 𝐸𝑠𝑠 : Zero offside