PERANCANGAN SISTEM PENGENDALI KECEPATAN MOTOR BRUSHLESS DC TIGA
FASA MENGGUNAKAN KONTROLER PID-FUZZY
Danang Arya Yudhistira
S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : [email protected]
Bambang Suprianto
S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : [email protected]
Abstrak
Brushless DC Motor (BLDC) adalah motor yang sering digunakan dalam dunia industri. Motor Brushless DC memiliki efisiensi dan daya yang tinggi namun pengaturan kecepatan rotornya pengaplikasiannya tergolong sulit untuk dikendalikan baik konstan maupun bervariasi. Kontroler yang digunakan dalam penelitian ini adalah Kontroler PID-Fuzzy merupakan metode pengendali yang tersusun dari kontroler konvensional dan kecerdasan buatan. Pada pengendali konvensional terdapat kontroler PID yang berfungsi untuk memperbaiki respon transien khususnya risetime, memperbaiki error steady-state mendekati nol dan memprediksi error yang akan terjadi. Sedangkan, pada kecerdasan buatan terdapat kontroler Fuzzy yang memiliki sifat mampu bekerja menirukan logika manusia untuk mempertimbangkan output pengontrol berupa sinyal kontrol yang akan diteruskan ke plant motor brushless dc. Hasil penelitian menunjukan bahwa perancangan pengendali kecepatan rotor pada motor brushless dc tanpa beban mampu mencapai nilai set point yang diberikan dengan rata-rata 𝑡𝑠 ± 0.0208 s, 𝑡𝑟 ± 0,0156 s, td ± 0,0039 s dan ess sebesar 0.0028%. Sedangkan hasil estimasi perancangan pengendalian kecepatan rotor pada motor brushless dengan beban penuh 3,4 N.m mampu mencapai nilai set point yang diberikan dengan rata-rata 𝑡𝑠 ± 0.0224 s, 𝑡𝑟 ± 0,0164 s, td ± 0,0038 s dan ess sebesar 0.0106%. Nilai ess yang sangat kecil ini masih dalam toleransi untuk kontroler yang baik.
Kata Kunci : Motor Brushless DC, PID, Fuzzy, Pengendali Kecepatan.
Abstract
Brushless DC Motors (BLDC) motors are often used in the industrial world. Brushless DC motors have high efficiency and high power but to apply the rotor speed setting is quite difficult to be controlled either constant or varied. The controller were used in this research are PID-Fuzzy controller is a controller method that is composed of a conventional controller and artificial intelligence. In conventional controllers there is a PID controller that serves to improve the transient response, especially risetime, improve steady-state error near zero and predicting error will occur.. Meanwhile, the artificial intelligence Fuzzy controllers are capable of working that have imitate human logic to consider the form of the controller output control signals that are transmitted to a brushless dc motor plant. The results showed that the design of rotor speed control in no-load dc brushless motor is able to reach the set point value given by an average ts s ± 0.0208, 0.0156 ± s tr, td ± 0.0039 s and ess amounted to 0.0028%. While the results of the design estimate the rotor speed control brushless motors with a full load of 3.4 Nm is able to reach the set point value given by an average ts s ± 0.0224, 0.0164 ± s tr, td ± 0.0038 s and ess at 0.0106 %. Ess very small value is within tolerances for good controller.
Keyword : Brushless DC Motor, PID, Fuzzy, Speed Control.
PENDAHULUAN
Di Industri sekarang sudah banyak menggunakan motor listrik searah (DC) untuk kepentingan produksi. Salah satu motor yang sering digunakan adalah Brushless DC Motor (BLDC). Keuntungan dari Brushless DC Motor (BLDC) yaitu memiliki efisiensi yang tinggi serta memiliki daya listrik yang tinggi. Namun ada kelemahan Brushless DC Motor (BLDC), dalam pengaturan kecepatan pada aplikasi tersebut sulit dilakukan baik dalam keadaan konstan maupun bervariasi karena memerlukan pengaturan frekuensi atau torsi. Maka dari itu, diperlukan suatu metode kontrol untuk mendapatkan pengaturan kecepatan yang diinginkan. Metode Six-Step merupakan metode yang sering digunakan dalam
pengendalian motor BLDC. Hal ini dikarenakan metode ini mudah diimplementasikan dan memiliki algoritma yang sederhana. Gelombang yang dihasilkan dari metode ini berbentuk square atau trapezoid. Kelemahan dari metode ini memiliki rugi-rugi daya yang besar, bising, dan arus yang besar. Untuk mengatasi kelemahan metode six-step digunakan kontroler PID yang membutuhkan tiga parameter yaitu proporsional gain, time integral dan derivatif.
Namun ada kelemahan di kontrol PID yaitu tidak bisa meredam terjadinya overshoot dan Undershoot dalam respon sistem. Overshoot dan Undershoot ini dapat mengakibatkan kerusakan pada motor karena melebihi kapasitas kemampuan motor. Berdasarkan
percobaan yang telah dilakukan dari beberapa referensi menyebutkan bahwa penerapan logika fuzzy pada metode six-step selain sebagai pengatur atau penstabil kecepatan motor, logika fuzzy dapat mengatur respon risetime menjadi cepat dan memperkecil adanya error sama halnya dengan kontroler PID. Namun ada keunggulan yang lain, yaitu meminimalisir adanya Overshoot dan Undershoot pada respon sistem kecepatan rotor.
Pada penelitian sebelumnya dengan judul “Pengendalian Kecepatan Motor Brushless DC (BLDC) menggunakan Metode Logika Fuzzy” yang diteliti oleh Agung Dwi Yulianta, Sasongko Pramono Hadi dan Suharyanto, didapatkan hasil kecepatan motor mencapai steady state dengan rise time 0.25 sekon, waktu mencapai steady state 0.27 sekon dan overshoot sebesar 0.15% untuk range kecepatan 1000-2000 rpm.
Dari hasil penelitian tersebut, kecepatan output sudah sesuai dengan kecepatan referensi yang diinginkan. Meskipun rise time, settling time dan delay time waktu mencapai steady-state masih tergolong cepat, tetapi overshoot dan error steady-state harusnya masih bisa diperkecil lagi dan lonjakan arus yang yang sangat besar. Oleh karena itu dilakukan penelitian tentang “Pengendali Kecepatan Motor Brushless DC Tiga Fasa Dengan Metode Six-Step Inverter Berbasis PID-Fuzzy”.
KAJIAN PUSTAKA
Motor Brushless DC Tiga Fasa
Brushless DC motor atau motor DC tanpa sikat merupakan motor listrik sinkron arus searah. Medan magnet yang dihasilkan oleh stator dan medan magnet rotor Motor BLDC berputar di frekuensi dan kecepatan yang sama. BLDC motor tidak mengalami slip, tidak seperti motor induksi. BLDC memiliki BEMF berbentuk trapezoid. BLDC dapat dikendalikan menggunkan metode six-step maupun metode PWM. Motor BLDC memiliki kelebihan dan kekurangan. Kelebihan dari motor BLDC adalah memiliki biaya perawatan yang relatif rendah dan dapat bekerja dengan kecepatan yang lebih tinggi karena tidak menggunakan brush atau sikat. BLDC memiliki efisiensi yang lebih tinggi dari pada motor induksi karena torsi awal yang lebih tinggi karena rotor terbuat dari magnet permanen. Motor BLDC mempunyai magnet permanen yang berputar dengan tetap pada sumbu motor, dengan menggunakan rotor berupa magnet maka tidak dibutuhkan lagi komutator. Tetapi kelemahan dari motor BLDC adalah pengendalian BLDC jauh lebih rumit untuk kecepatan dan torsi yang konstan karena tidak menggunakan brush atau sikat sebagai komutator.
Gambar 1. Konstruksi Motor BLDC Tiga Fasa.
Model Matematika Motor Brushless DC Tiga Fasa
Dari rangkaian ekuivalen diatas, maka dapat dimodelkan matematika dengan menggunakan hukum Kirchoff untuk tegangan (KVL), persamaan kumparan stator dapat dituliskan sebagai berikut:
Pada Fasa A: 𝑉𝑎 = (𝐿 − 𝑀)𝑑𝑖𝑎 𝑑𝑡 + 𝑅. 𝑖𝑎 + 𝑒𝑎 ... (1) (𝐿 − 𝑀)𝑑𝑖𝑎 𝑑𝑡 = 𝑉𝑎 − 𝑅. 𝑖𝑎 − 𝑒𝑎 ... (2) 𝑑𝑖𝑎 𝑑𝑡 = 1 𝐿−𝑀𝑉𝑎 − 1 𝐿−𝑀𝑅. 𝑖𝑎 − 1 𝐿−𝑀𝑒𝑎 ... (3) Pada Fasa B: 𝑉𝑏 = (𝐿 − 𝑀)𝑑𝑖𝑏 𝑑𝑡 + 𝑅. 𝑖𝑏 + 𝑒𝑏 ... (4) (𝐿 − 𝑀)𝑑𝑖𝑏 𝑑𝑡 = 𝑉𝑏 − 𝑅. 𝑖𝑏 − 𝑒𝑏 ... (5) 𝑑𝑖𝑏 𝑑𝑡 = 1 𝐿−𝑀𝑉𝑏 − 1 𝐿−𝑀𝑅. 𝑖𝑏 − 1 𝐿−𝑀𝑒𝑏 ... (6) Pada Fasa C: 𝑉𝑐 = (𝐿 − 𝑀)𝑑𝑖𝑐 𝑑𝑡 + 𝑅. 𝑖𝑐 + 𝑒𝑐 ... (7) (𝐿 − 𝑀)𝑑𝑖𝑐 𝑑𝑡 = 𝑉𝑐 − 𝑅. 𝑖𝑐 − 𝑒𝑐 ... (8) 𝑑𝑖𝑐 𝑑𝑡 = 1 𝐿−𝑀𝑉𝑐 − 1 𝐿−𝑀𝑅. 𝑖𝑐 − 1 𝐿−𝑀𝑒𝑐 ... (9) Maka bentuk persamaan kumparan stator brushless DC motor, sebagai berikut:
[ 𝑉𝑎 𝑉𝑏 𝑉𝑐 ] = [ 𝐿 − 𝑀 0 0 0 𝐿 − 𝑀 0 0 0 𝐿 − 𝑀 ]𝑑 𝑑𝑡[ 𝑖𝑎 𝑖𝑏 𝑖𝑐 ] + [ 𝑅 0 0 0 𝑅 0 0 0 𝑅 ] [ 𝑖𝑎 𝑖𝑏 𝑖𝑐 ] + [ 𝑒𝑎 𝑒𝑏 𝑒𝑐 ] ... (10)
Persamaan di Bab 2 dalam kajian pustaka diubah menjadi tegangan antara fasa ke fasa sebagai berikut.
(𝐿 − 𝑀) = 𝐿𝑠 ... (11) 𝑉𝑎𝑏 = 𝑅(𝑖𝑎 − 𝑖𝑏) + 𝐿𝑠 𝑑 𝑑𝑡(𝑖𝑎 − 𝑖𝑏) + 𝑒𝑎 − 𝑒𝑏 ... (12) 𝑉𝑏𝑐 = 𝑅(𝑖𝑏 − 𝑖𝑐) + 𝐿𝑠𝑑 𝑑𝑡(𝑖𝑏 − 𝑖𝑐) + 𝑒𝑏 − 𝑒𝑐 ... (13) 𝑉𝑐𝑎 = 𝑅(𝑖𝑐 − 𝑖𝑎) + 𝐿𝑠𝑑 𝑑𝑡(𝑖𝑐 − 𝑖𝑎) + 𝑒𝑐 − 𝑒𝑎 ... (14) Hubungan arus stator adalah sebagai berikut.
𝑖𝑎 + 𝑖𝑏 + 𝑖𝑐 = 0 ... (15) 𝑑 𝑑𝑡𝑖𝑎 = 1 3𝐿𝑠[2𝑉𝑎𝑏 + 𝑉𝑏𝑐 − 3𝑅𝑠. 𝑖𝑎 + 𝜆𝑝𝜔𝑟(−2𝑒𝑎 ′+ 𝑒𝑏′+ 𝑒𝑐′)] ... (16)
𝑑 𝑑𝑡𝑖𝑏 = 1 3𝐿𝑠[−𝑉𝑎𝑏 + 𝑉𝑏𝑐 − 3𝑅𝑠. 𝑖𝑏 + 𝜆𝑝𝜔𝑟(𝑒𝑎′ − 2𝑒𝑏′+ 𝑒𝑐′)] ... (17) 𝑑 𝑑𝑡𝑖𝑐 = − ( 𝑑 𝑑𝑡𝑖𝑐 + 𝑑 𝑑𝑡𝑖𝑐) ... (18) Back emf tergantung pada flux pada magnet permanen dan kecepatan rotor.
[ 𝑒𝑎 𝑒𝑏 𝑒𝑐 ] =𝑘𝑒.𝜔𝑟 2 [ 𝐹(𝜃𝑒) 𝐹 (𝜃𝑒 −2𝜋 3) 𝐹 (𝜃𝑒 +2𝜋 3)] ... (19) 𝑘𝑡 = 𝑘𝑒. 𝜔𝑟 ... (20)
Sehingga torsi elektromagnetik untuk bentik sebagai berikut.
𝑇𝑒 = 𝑝𝜆(𝑒𝑎. 𝑖𝑎 + 𝑒𝑏. 𝑖𝑏 + 𝑒𝑐. 𝑖𝑐) ... (21)
Untuk persamaan mekanikalnya sebagai berikut:
𝑑 𝑑𝑡𝜔𝑟 = 1 𝐽(𝑇𝑒 − 𝐹𝜔𝑟 − 𝑇𝑚) ... (22) 𝑑𝜃 𝑑𝑡 = 𝜔𝑟 ... (23) METODE PENELITIAN Diagram Alir Penelitian
Langkah-langkah dalam penelitian ini dijelaskan dalam diagram alir yang ditunjukkan pada Gambar 2 berikut.
Gambar 2. Diagram Alur Penelitian Parameter Plant
Daya Motor 1 kW, Tegangan DC yang dicatu pada driver motor 3 fasa sebesar 500 V, yang diubah menjadi tegangan AC 3 fasa ke terminal stator.
Tabel 1. Nilai-nilai parameter siristem BLDC Tiga Fasa
Parameter Keterangan Nilai Satuan
𝑹 Tahanan Fasa Stator 2,875 Ω 𝑳𝒔 Induktansi Fasa Stator 0,0085 H 𝑲𝒆 Konstanta Flux 0,1875 V.s 𝑲𝒕 Konstanta Torsi 1,5 N.m 𝑱 Momen Inersia 0,0008 Kg.m2 𝑭 Friksi 0,001 N.m.s 𝒑 Jumlah Kutub 4
Desain Kontroler PID
Fungsi kontroler PID pada pengendalian motor Brushless dc ini berfungsi untuk mempercepat risetime, mengurangi adanya undershoot dan overshoot, menghilangkan offset dan meningkatkan stabilitas sistem. Kontrol Proposional (Kp) berfungsi untuk memperbaiki respon transien khususnya risetime, kontrol integral (Ki) berfungsi untuk memperbaiki error steady-state mendekati nol, kontrol derivatitive (Kd) berfungsi untuk memprediksi error yang akan terjadi. Speed reference dan arus feedback menjadi input kontrol PID dan outputnya adalah Manipulated Variabel (mv(t)) atau sinyal keluaran PID.
Identifikasi Statis 𝑌𝑠𝑠 = 3449 𝑋𝑠𝑠 = 3000 Sehingga, 𝐾 =𝑌𝑠𝑠 𝑋𝑠𝑠= 3449 3000= 1,1496
Salah satu karakteristik sistem orde satu adalah ketika nilai t = τ, yaitu ketika nilai keluaran mencapai 63,2% dari nilai akhirnya. Untuk keluaran sistem C(τ) perhitungannya sebagai berikut:
𝐶(𝜏) = 0.632 𝑥 3449 = 2179,768
Setelah mengetahui keluaran sistem C(τ), kita dapat mengetahui konstanta waktu (τ) melalui data workspace MATLAB sebesar τ = 0.0042 s. Dalam tugas akhir ini, kontanta waktu tertentu (τ*) dipercepat 0.5x dari konstanta waktu sebelumnya (τ). Sehingga ditemukan τ*adalah sebagai berikut:
0,5𝜏∗= 𝜏 𝜏∗= 𝜏 0,5 𝜏∗=0.0042 0,5 = 0,084 𝑠
Setelah menentukan nilai kontanta waktu tertentu (τ*), konstanta waktu sebelumnya (τ) dan gain overall (K), kita dapat menentukan nilai Kp, Ki dan Kd. Jika spesifikasi performansi yang diinginkan berupa respon orde pertama dengan τ* tertentu maka terdapat
permisalan 𝜏 = 𝜏𝑖= 𝜏𝑑. Sehingga dapat ditentukan nilai Kp, Ki dan Kd berdasarkan persamaan (16), (17) dan (18) sebagai berikut. 𝐾𝑝= 𝜏𝑖 𝐾𝑥𝜏∗= 0,0042 0,084 𝑥 1,49666= 0,0435 𝐾𝑖= 𝐾𝑝 𝜏𝑖 =0,0435 0,0042= 10,355 𝐾𝑑= 𝐾𝑝. 𝜏𝑑= 0,0435 𝑥 0,0042 = 0,000182
Desain Kontroler Fuzzy
Kontroler fuzzy berfungsi sebagai pengendali kecerdasan buatan. Input kontroler logika fuzzy berupa mvt dan mvt sebelumnya (dmvt) output dari kontroler PID yang menjadi masukkan dari fuzifikasi. Sedangkan output berupa sinyal keluaran hasil defuzifikasi. Langkah-langkah dalam perancangan kontroler fuzzy terdiri dari pembuatan fuzifikasi, rule base, dan defuzifikasi
Fuzifikasi
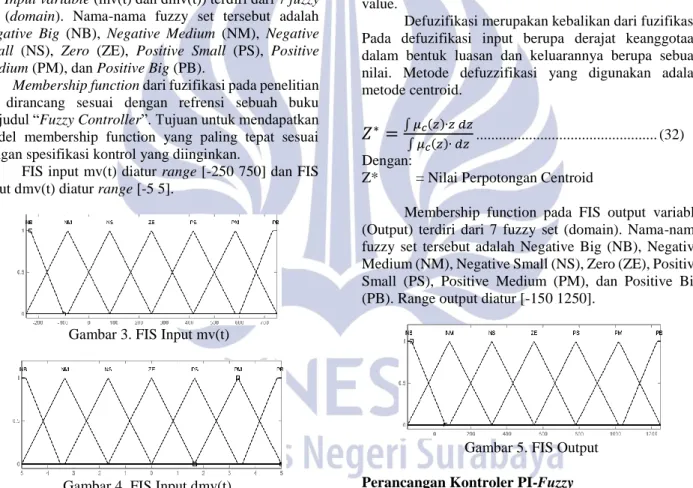
Fuzifikasi pada penelitian ini menggunakan membership function tipe triangular dan trapezoid. Input kontroler fuzzy berupa manipulated variable (mv(t)) dan delta manipulated variable (dmv(t)) dari output kontrol PID dan keluaran berupa sinyal kontrol.
Input digunakan untuk mendapatkan derajat keanggotaan. Membership function pada masing-masing FIS Input variable (mv(t) dan dmv(t)) terdiri dari 7 fuzzy set (domain). Nama-nama fuzzy set tersebut adalah Negative Big (NB), Negative Medium (NM), Negative Small (NS), Zero (ZE), Positive Small (PS), Positive Medium (PM), dan Positive Big (PB).
Membership function dari fuzifikasi pada penelitian ini dirancang sesuai dengan refrensi sebuah buku berjudul “Fuzzy Controller”. Tujuan untuk mendapatkan model membership function yang paling tepat sesuai dengan spesifikasi kontrol yang diinginkan.
FIS input mv(t) diatur range [-250 750] dan FIS Input dmv(t) diatur range [-5 5].
Gambar 3. FIS Input mv(t)
Gambar 4. FIS Input dmv(t).
Rule Base
Rule base yang digunakan yaitu rule base if..then. Tabel memperlihatkan rule base yang dipakai pada kontroler fuzzy. Rule base untuk membership function model seperti diatas menggunakan aturan seperti yang ditunjukan oleh Tabel 2.
Tabel 2. Rule Base Kontroler Logika Fuzzy untuk Membership Funtion e NB NM NS ZE PS PM PB NB NB NB NB NM NS NS ZE NM NB NB NM NS NS ZE PS NS NB NM NS NS ZE PS PS ZE NM NS NS ZE PS PS PM PS NS NS ZE PS PS PM PB PM NS ZE PS PS PS PM PB PB ZE PS PS PM PB PB PB Defuzifikasi
Hasil keluaran proses implikasi akan masuk ke proses defuzifikasi. Tujuan dari defuzifikasi adalah untuk mendapatkan nilai konstanta keluaran dari kontroler fuzzy dan nilai inilah yang merupakan manipulated value.
Defuzifikasi merupakan kebalikan dari fuzifikasi. Pada defuzifikasi input berupa derajat keanggotaan dalam bentuk luasan dan keluarannya berupa sebuah nilai. Metode defuzzifikasi yang digunakan adalah metode centroid.
𝑍
∗=
∫ 𝜇𝑐(𝑧)∙𝑧 𝑑𝑧∫ 𝜇𝑐(𝑧)∙ 𝑑𝑧 ... (32) Dengan:
Z* = Nilai Perpotongan Centroid
Membership function pada FIS output variable (Output) terdiri dari 7 fuzzy set (domain). Nama-nama fuzzy set tersebut adalah Negative Big (NB), Negative Medium (NM), Negative Small (NS), Zero (ZE), Positive Small (PS), Positive Medium (PM), dan Positive Big (PB). Range output diatur [-150 1250].
Gambar 5. FIS Output
Perancangan Kontroler PI-Fuzzy
Dari pemodelan blok yang telah dibuat sebelumnya, setiap blok dapat disusun dan dirangkai menjadi simulasi pengendalian kecepatan motor Brushless DC tiga fasa seperti pada gambar 3.16. Dalam simulasi ini terdapat dua input yaitu input kecepatan referensi dan input torsi beban. Input kecepatan referensi dan input torsi beban berupa input step. Input kecepatan referensi digunakan untuk memberi setpoint steady-state kecepatan motor Brushless DC. Input Beban digunakan untuk memberi torsi beban motor Brushless DC. Gambar rangkaian Brushless DC tiga fasa menggunakan PID-Fuzzy adalah sebagai berikut.
Gambar 6. Gambar Kontrol PID-Fuzzy.
Gambar 7. Diagram Blok Sistem Kontrol PI-Fuzzy
HASIL DAN PEMBAHASAN
Open Loop BLDC Tiga Fasa
Keadaan pertama melakukan simulasi dengan menggunakan simulink MATLAB dimana sinyal input adalah sinyal step. Plant dihubungkan pada input sinyal step berupa kecepatan referensi yang merupakan variabel yang dimanipulasi agar kecepatan rotor motor Brushless dc 3 fasa tetap terjaga sesuai yang diinginkan. Sedangkan variabel yang dikontrol adalah kecepatan rotor Brushless dc. Nilai dari kecepatan referensi adalah 3000 rpm, kemudian hasil respon dianalisis dan hasil respon ditunjukkan pada gambar.
Gambar 8. Respon Open Loop
Dari hasil gambar simulasi respon open loop motor Brushless DC tiga fasa tanpa kontroler bahwa output kecepatan rotor sebesar 3449 rpm, lonjakan arus sebesar 42 A, Back EMF tegangan puncak sebesar 270 V_peak, Lonjakan torsi sebesar 326 N.m. Hasil respon open loop tidak sesuai dengan setpoint yang diatur sehingga dibutuhkan kontroler untuk mengatur respon.
Pengujian plant dengan membandingkan antara kontroler PID, kontroler Fuzzy, dan kontroler PID-Fuzzy dengan set point konstan.
Tujuan pengujian ini membandinkan kontroler PID, kontroler fuzzy dan kontroler PID-Fuzzy adalah mengetahui respon kecepatan rotor dari plant yang memiliki kinerja yang lebih efektif saat keadaan tidak berbeban. Hasil respon di analisis respon transien seperti rise time, settling time, delay time, max overshoot, max undershoot dan error steady-state.
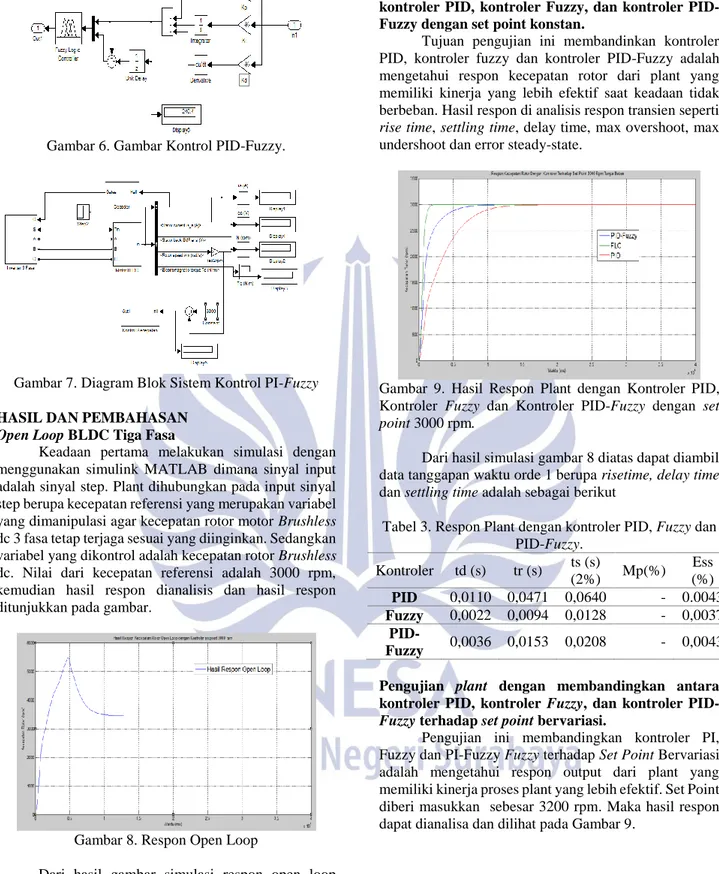
Gambar 9. Hasil Respon Plant dengan Kontroler PID, Kontroler Fuzzy dan Kontroler PID-Fuzzy dengan set point 3000 rpm.
Dari hasil simulasi gambar 8 diatas dapat diambil data tanggapan waktu orde 1 berupa risetime, delay time dan settling time adalah sebagai berikut
Tabel 3. Respon Plant dengan kontroler PID, Fuzzy dan PID-Fuzzy. Kontroler td (s) tr (s) ts (s) (2%) Mp(%) Ess (%) PID 0,0110 0,0471 0,0640 - 0.0043 Fuzzy 0,0022 0,0094 0,0128 - 0,0037 PID-Fuzzy 0,0036 0,0153 0,0208 - 0,0043
Pengujian plant dengan membandingkan antara kontroler PID, kontroler Fuzzy, dan kontroler
PID-Fuzzy terhadap set point bervariasi.
Pengujian ini membandingkan kontroler PI, Fuzzy dan PI-Fuzzy Fuzzy terhadap Set Point Bervariasi adalah mengetahui respon output dari plant yang memiliki kinerja proses plant yang lebih efektif. Set Point diberi masukkan sebesar 3200 rpm. Maka hasil respon dapat dianalisa dan dilihat pada Gambar 9.
Gambar 10. Respon Plant dengan Kontroler PID, Fuzzy dan PID-Fuzzy dengan set point bervariasi
Tabel 4. Respon Plant dengan kontroler PID, Fuzzy dan PID-Fuzzy dengan Set Point Bervariasi Kontroler td (s) tr (s) ts (s) (2%) Mp (%) Ess (%) PID 0,0111 0,0474 0,0644 - 0.0034 Fuzzy 0,0022 0,0097 0,0132 - 0,3432 PID-Fuzzy 0,0037 0,0158 0,0216 - 0,0014
Pengujian plant dengan membandingkan antara kontroler PID, kontroler Fuzzy, dan kontroler
PID-Fuzzy keadaan berbeban.
Setelah dilakukan pengujian dengan set point sesuai hasil kinerja yang efektif maka selanjutnga pengujian plant dengan penambahan beban. Tujuan pengujian ini dengan setpoint konstan 3000 rpm dengan torsi beban bervariasi ini membandingkan hasil respon output kontroler PID, kontroler fuzzy dan kontroler PID-Fuzzy respon mana yang lebih efektif. Beban yang diberikan adalah 3,4 N.m.
Gambar 11 Respon Plant dengan Kontroler PID, Fuzzy dan PI-Fuzzy Penambahan Beban 3,4 N.m
Tabel 5. Respon Plant dengan kontroler PID, Fuzzy dan PID-Fuzzy dengan Penambahan Beban 3,4 N.m Kontroler td (s) tr (s) ts (s) (2%) Mp (%) Ess (%) PID 0,0120 0,0509 0,0692 - 0.0355 Fuzzy 0,0023 0,0101 0,0136 - 0,319 PID-Fuzzy 0,0038 0,0164 0,0224 - 0,00372
Pengujian plant dengan membandingkan antara kontroler PID, kontroler Fuzzy, dan kontroler
PID-Fuzzy keadaan diberi gangguan.
Setelah dilakukan pengujian dengan set point sesuai hasil kinerja yang efektif maka selanjutnga pengujian plant dengan adanya gangguan secara tiba-tiba. Tujuan pengujian ini dengan setpoint konstan 3000 rpm dengan torsi beban bervariasi ini membandingkan hasil respon output kontroler PID, kontroler fuzzy dan kontroler PID-Fuzzy respon mana yang lebih efektif. Gangguan yang diberikan adalah 3,4 N.m.
Gambar 12 Respon Plant dengan Kontroler PID, Fuzzy dan PID-Fuzzy dengan Penambahan Gangguan
Tabel 6. Respon Plant dengan kontroler PID, Fuzzy dan PID-Fuzzy Penambahan Gangguan
Kontroler td (s) tr (s) ts (s) (2%) Mp (%) Ess (%) PID 0,0110 0,0471 0,0640 - 0.0355 Fuzzy 0,0022 0,0094 0,0128 - 0,319 PID-Fuzzy 0,0036 0,0153 0,0208 - 0,00372
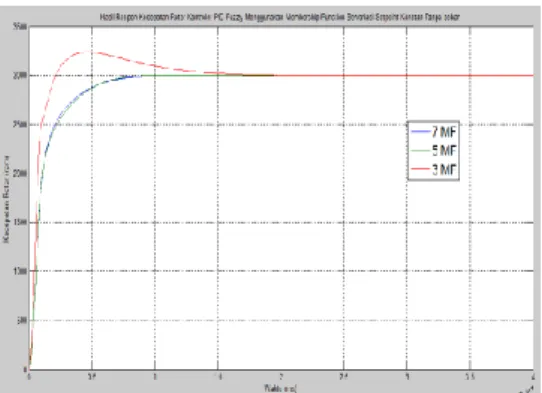
Pengujian plant dengan membandingkan antara penggunaan PID-Fuzzy menggunakan 3 membership function , 5 membership function dan 5 membership function .
Tujuan pengujian ini untuk membandingkan kontrol fuzzy menggunakan membership function yang bervariasi dan dianalisis kontrol fuzzy mana yang lebih cocok untuk dikombinasikan oleh kontrol PID. Pengujian dilakukan dengan kecepatan konstan tanpa beban dan menggunakan beban. Membership function yang digunakan untuk perbandingan menggunakan 7 membership function, 5 membership function dan 3 membership function.
Gambar 13 Respon Plant dengan Kontroler PID, Fuzzy dan PID-Fuzzy Penambahan Beban Maksimal Tabel 7. Respon Plant dengan kontroler PI, Fuzzy dan
PI-Fuzzy Penambahan Beban Maksimal Kontroler td (s) tr (s) ts (s) (2%) Mp (%) Ess (%) 3 MF 0,0024 0,0103 0,0208 7,8 0.0033 5 MF 0,0036 0,0153 0,0208 - 0,0064 7 MF 0,0036 0,0153 0,0208 - 0,0028
Dari hasil pengujian kontroler setpoint bervariasi tanpa beban dan berbeban, Kontroler PID-Fuzzy memiliki respon lebih baik daripada respon kontrol PID dan Kontrol FLC karena dapat mengikuti setpoint yang bervariasi tanpa beban maupun dengan Berbeban dengan error steady-state yang rendah. Kontrol PID saat keadaan tidak berbeban dapat mencapai setpoint yang diinginkan tetapi ketika diberi beban cenderung tidak mencapai setpoint yang diinginkan dan respon waktu yang lambat. Kontrol Fuzzy memiliki respon waktu yang paling cepat daripada kontrol PID dan kontrol PID-Fuzzy tetapi memiliki tingkat ketelitian yang rendah dan adanya overshoot. Saat diberi gangguan kontrol PID-Fuzzy dapat mempertahankan setpoint dengan nilai error steady-state yang kecil daripada kontroler PID dan FLC. Penggunaan PID-Fuzzy dengan 7 membership function dan 5 membership function lebih baik baik dari pada penggunaan 3 membership function. Penggunaan 3 membership function lebih cepat dan dapat mencapai setpoint yang diinginkan tetapi masih terdapat adanya overshoot.
PENUTUP Simpulan
Dari hasil perancangaan sistem pengendalian kecepatan motor Brushless dc menggunakan kontrol PID-Fuzzy dapat diambil kesimpulan sebagai berikut :
Dilihat dari hasil perancangan pengendali kecepatan rotor pada motor Brushless dc, kontroler PID-Fuzzy dapat mengendalikan kecepatan rotor lebih baik dan lebih stabil daripada menggunakan kontrol PID dan kontrol Fuzzy.
Hasil pengujian dengan setpoint 3000 rpm kondisi tanpa beban adalah settling time 0.0208 s, rise time 0,0156 s, delay time 0,0039 s, error steady state sebesar 0.0028% dan max overshoot sebesar 0%.
Hasil pengujian dengan setpoint 3000 rpm kondisi berbeban 3,4 N.m adalah settling time 0,0224 s, rise time
0,0164 s, delay time 0,0038 s, error steady state sebesar 0,0106% dan max overshoot sebesar 0%.
Hasil pengujian dengan setpoint 3000 rpm kondisi diberi gangguan adalah settling time 0,0208 s, rise time 0,0153 s, delay time 0,0036 s, error steady state sebesar 0.0106% dan max overshoot sebesar 0%.
Nilai error steady state kontrol PID-Fuzzy yang sangat kecil ini masih dalam toleransi untuk kontroler yang baik.
Saran
Saran yang dapat diberikan adalah lebih baik menggunakan pemodelan matematika dari rumus matematika plant dalam pembuatan sistem. Dengan pemodelan matematika dapat memasukan parameter-parameter lebih lengkap dan kompleks daripada menggunakan alat yang sudah ada di library MATLAB sehingga mudah untuk dianalasis dan di pahami secara detail.
DAFTAR PUSTAKA
Bolton, W, Sistem Instrumentasi dan Sistem Kontrol, Erlangga, Jakarta, 2004
Dharmawan, Ade, Skripsi Pengendalian Kecepatan Brushless DC Dengan Metode PWM Sinusodial Menggunakan ATMega16, Universitas Indonesia, Depok, 2009
Herman, L, Stephen, Electric Motor Control 9th Edition, Delmar Cengange Learning, California, 2010 Itscn, 2016, Contruction BLDC Motor 3 phase,
https://itscn.com/, diakses pada tanggal 21 Januari 2015 pukul 20.10 WIB.
Kusuma, Dewi, Artificial Intelligence (Teknik dan Aplikasinya), Graha Ilmu, Yogyakarta, 2003. Kusumadewi, Sri, Analisis dan Desain Sistem Fuzzy
menggunakan Toolbox Matlab, Graha Ilmu, Yogyakarta, 2002
Munawar,I. dan Yahuarsyah,H., Pemodelan dan Analisis Sistem Pensaklaran Motor Arus Searah Tanpa Sikat,Desertasi S3 Jurusan Tenik Elektro Institut Teknologi Bandung, Bandung, 2005.
Muslim, Supari, Teknik Pembangkit Tenaga Listrik Untuk Sekolah Menengan Kejuruan, Direktorat Pembinaan Sekolah Menengah Kejuruan, Jakarta, 2008.
Raden, 2011, Pengertian Kendali P.I.D (Proportional– Integral–Derivative controller), diakses pada tanggal 20 Januari 2016 pada pukul 20.55 WIB
Sutikno, Perbandingan Metode Defuzzifikasi Aturan Mamdani Pada Sistem Kendali Logika Fuzzy, Tugas akhir, Universitas Diponegoro. Semarang, 2005 Zhao, Jin, Brushless DC Motor Fundamental Apllication