DETEKSI KEBAKARAN PADA VIDEO
BERBASIS PENGOLAHAN CITRA
NASKAH PUBLIKASI
Diajukan oleh
Pambudi Raharjo
12.21.0680
kepada
JURUSAN TEKNIK INFORMATIKA
SEKOLAH TINGGI MANAJEMEN INFORMATIKA DAN KOMPUTER
AMIKOM YOGYAKARTA
YOGYAKARTA
2014
FIRE DETECTION IN VIDEO SEQUENCE BASED ON IMAGE PROCESSING
DETEKSI KEBAKARAN PADA VIDEO BERBASIS PENGOLAHAN CITRA
Pambudi Raharjo Andi Sunyoto Jurusan Teknik Informatika STMIK AMIKOM YOGYAKARTA
ABSTRACT
Fire is a huge problem for the sustainability of ecological and human life around the forest. The Indonesian government has cooperated with the Australian government to determine the hot spot on forest area using NOAA (National Oceanic and Atmospheric Administration) satellite. Fire also should be monitored locally in the suspected areas of being hot spot to prevent the spread of fire. This can be done by the fire detection system in video sequence based on image processing.
This detection system use combination Mixture of Gaussian and statistics color of smoke and fire. This method detects every movement in the video then matches them with fire and smoke criteria. If the detected region matched the criteria, program will show status “Fire Detected!!!”. Alarm will trigger after 30 frames in the video detected as fire. This program was written with MATLAB ® software because MATLAB® store small file for complex program.
The trial result with some forest fire and non-forest fire sample video show that program works well on forest fire detection either noon or night. This program also detects forest fire quickly with low false alarm.
1. Pendahuluan
Kebakaran hutan merupakan ancaman terbesar bagi kelangsungan ekologis dan ekosistem hutan. Secara tidak langsung juga dapat mengancam pertumbuhan ekonomi dan jiwa manusia. Menurut data dari Ditjen Perlindungan Hutan dan Konservasi Alam (2006), kira-kira tiga ribu hektar dari total 19 juta hektar kawasan hutan di Indonesia terbakar setiap tahunnya.
Pemerintah Indonesia telah bekerjasama dengan pemerintah Australia untuk menentukan titik-titik api (hotspot) pada kawasan hutan dengan memanfaatkan satelit NOAA (National Oceanic and Atmospheric Administration). Akan tetapi hal ini belum cukup untuk menanggulangi kebakaran hutan terutama dari segi kecepatan dalam mencegah penyebaran api. Kebakaran hutan juga harus dipantau secara lokal di daerah yang diduga sebagai titik api untuk meningkatkan kecepatan tanggap dari penjaga hutan maupun pemadam kebakaran dalam mencegah penyebaran api.
Salah satu cara untuk meminimalkan kerusakan akibat kebakaran yaitu dengan membuat sistem peringatan agar penyebaran api dapat dicegah secepat mungkin. Pengawasan didaerah rawan kebakaran hutan seharusnya juga dilakukan secara penuh baik siang maupun malam. Oleh karena itu, dikembangkan suatu metode deteksi kebakaran dengan berbasis pengolahan citra untuk mengolah data video rekaman pemantauan sehingga pendeteksian dapat dilakukan secara otomatis.
2. Landasan Teori
2.1 Citra Sebagai Matriks
Matriks merupakan kumpulan angka yang disusun ke dalam baris dan kolom. Elemen matriks adalah angka-angka yang menyusun matriks. Misalnya:
dimana merupakan elemen matriks A dengan merupakan
elemen matriks A di baris pertama kolom pertama, merupakan elemen matriks A di baris pertama kolom kedua dan seterusnya.
Di dalam pengolahan citra digital, citra disajikan sebagai matriks yang setiap elemen matriksnya mewakili sebuah piksel. Ordo matriks merupakan banyaknya baris dan kolom dalam matriks. Matriks ordo m x n mempunyai m baris dan n kolom. Ordo matriks juga menyatakan dimensi atau ukuran citra.
2.2 Statistik Data 2.2.1 Mean
(2.2)
keterangan: = rata-rata (mean).
= banyaknya data.
= sum atau jumlah semua data.
2.2.2 Standar Deviasi
Merupakan ukuran sebaran set data dari rata-ratanya. Standar deviasi dirumuskan sebagai berikut:
(2.3)
Keterangan:
= standar deviasi.
= banyaknya data.
= sum data kuadrat dari selisih data ke-i dengan rata-ratanya.
2.2.3 Varian
Merupakan ukuran sebaran titik-titik data disekeliling nilai rata-ratanya. Varian
disimbolkan dengan atau kuadrat dari standar deviasi. Varian dirumuskan sebagai berikut:
(2.4)
2.3 Algoritma K-Means
K-Means merupakan algoritma untuk mengelompokkan n data ke dalam K klaster sehingga setiap datanya termasuk ke dalam klaster dengan rata-rata yang terdekat dengan data tersebut. Algoritma K-Means dirumuskan dengan (Hastie dkk, 2009) (Weisstein, 2005) :
(2.5)
dimana adalah ukuran jarak diantara data dengan pusat
klaster , sebagai indikator jarak n data dari pusat klasternya. Langkah-langkah dalam algoritma K-Means:
Menempatkan titik K pada ruang yang datanya akan dikelompokkan. Titik ini mewakili centroid awal dari masing-masing kelompok.
Menempatkan setiap data ke dalam kelompok yang mempunyai centroid terdekat dengan data tersebut. Pengelompokan setiap data berdasarkan jaraknya dari centroid.
(2.6)
Ketika semua data sudah ditempatkan, K centroid dihitung kembali. Mengulang langkah 2 dan 3 sampai centroid tidak berubah lagi.
Hasil dari algoritma K-Means yaitu indeks data-data yang sudah dikelompokkan di setiap klasternya dan centroid masing-masing klaster.
2.4 Median Filter
Median filter digunakan untuk mengurangi salt and pepper noise dari suatu citra. Median filter menganggap setiap piksel di suatu citra dalam satu putaran dan melihat tetangganya untuk ditentukan piksel tersebut mewakili sekelilingnya atau tidak. Median filter biasanya menggunakan 3x3 neighborhood. Setiap piksel di dalam lokasi tersebut diurutkan kemudian dicari mediannya. Setelah ditentukan mediannya kemudian piksel yang tidak mewakili diganti dengan nilai median tersebut.
2.5 Background Modeling
Background modeling digunakan untuk memodelkan background dan mendeteksi obyek yang bergerak dari video. Cara yang paling sederhana dari background modeling yaitu dengan mengambil background dari frame yang belum ada obyek yang bergerak sebagai acuan bagi frame selanjutnya untuk dideteksi perubahan setiap frame dari background acuan tersebut. Pada kondisi lingkungan tertentu, background tidak bisa ditentukan karena keadaan yang selalu berubah seperti sudah terdapat obyek bergerak pada background, perubahan cahaya dan adanya objek yang masuk atau keluar dari background sehingga digunakan cara yang dapat mengatasi kondisi lingkungan yang berubah – ubah yaitu Mixture of Gaussian.
2.6 Mixture of Gaussian
Metode Mixture of Gaussian banyak dipakai dalam mendeteksi gerakan dalam video. Metode ini mendeteksi gerakan dari perbedaan frame sekarang dengan frame
sebelumnya dengan melakukan update parameter bobot , rata-rata dan
standar deviasi . Background modeling dengan metode ini memiliki beberapa tahapan dalam algoritmanya, yaitu:
a. Membaca frame pertama dari video. b. Menentukan jumlah komponen Gaussian.
c. Membuat inisialisasi awal dari frame pertama untuk parameter bobot
, rata-rata dan standar deviasi untuk setiap komponen Gaussian.
d. Membuat peringkat untuk setiap komponen Gaussian.
e. Membuat syarat kecocokan (match), untuk setiap komponen yang cocok di-update parameternya dan yang tidak cocok dibuatkan parameter baru.
f. Menentukan background dan foreground dari setiap komponen Gaussian.
2.6.1 Jumlah Komponen Gaussian
Komponen Gaussian mengindikasikan kumpulan sebaran data yang dikelompokkan ke dalam klaster. Komponen Gaussian bernilai 3 sampai 7. Nilai 3 didapat dari asumsi bahwa permodelan minimal mempunyai 1 foreground di setiap frame. Dalam percobaan untuk nilai 5 keatas tidak menunjukkan peningkatan yang signifikan dalam mendeteksi foreground (Power dan Schoonees, 2002).
2.6.2 Inisialisasi Awal
Inisialisasi awal sangat penting dalam menentukan hasil dari metode ini. Inisialisai
awal bobot mewakili nilai kemungkinan komponen K muncul pada frame, dihitung menggunakan rumus (Power dan Schoonees, 2002) :
(2.7)
Standar deviasi menggunakan nilai 6 yang menyatakan ukuran variasi setiap piksel data dari komponennya, sedangkan rata-ratanya merupakan centroid dari setiap komponen dari algoritma K-Means.
2.6.3 Update Parameter
Parameter perlu di-update di setiap waktu untuk menentukan piksel mana yang berubah dan mana yang tetap. Parameter di-update berdasarkan kecocokan (match)
jika maka match = 1, dimana merupakan
selisih piksel data dari tiap frame terhadap rata-rata tiap komponennya dan D merupakan konstanta yaitu 2 atau 2,5.
Syarat kecocokan diatas mengakibatkan adanya dua kemungkinan (Bouwmans dkk., 2008), yaitu :
Teorema 2.1: Bila maka match = 1
Pada kemungkinan diatas untuk komponen yang cocok, masing-masing parameter di-update:
(2.8) (2.9)
(2.10) (2.11)
Sedangkan untuk komponen yang tidak cocok, nilai dan tidak berubah hanya bobotnya yang di-update dengan rumus:
(2.12) Teorema 2.2: Tidak ada komponen yang cocok dengan setiap K Gaussian. Bila hal ini terjadi maka membuat parameter baru sebagai berikut:
(2.13) (2.14) (2.15) Keterangan: bobot. rata-rata. standar deviasi.
learning rate untuk bobot.
learning rate untuk dan
piksel data.
= varian.
2.6.4 Memisahkan Background dan Foreground
Kriteria sebagai background yaitu nilai bobot yang tinggi dan tidak banyak variasi atau dengan kata lain tingkat kemunculan yang tinggi dan tidak banyak berubah.
Kriterianya dapat dituliskan dengan rasio , kemudian dicari nilai yang paling tinggi dari rasio tersebut untuk diprioritaskan sebagai background bila memenuhi syarat sebagai berikut (Bouwmans dkk., 2008) :
(2.16) dimana T merupakan threshold background.
2.7 Kriteria Api dan Asap
Beberapa percobaan telah dilakukan untuk mengenali kriteria api dan asap dengan pengolahan citra. Kriteria api kebakaran hutan sebagai berikut (Celik dkk, 2006) :
a. Mempunyai tingkat kecerahan yang tinggi dan didominasi warna merah. b. Selalu berubah-ubah bentuknya dan mempunyai kibasan yang acak. Kriteria asap kebakaran hutan sebagai berikut:
b. Ada yang bersifat transparan sehingga warnanya bisa terpengaruh dengan background.
c. Area asap biasanya besar dan berkembang.
Kriteria-kriteria tersebut selanjutnya akan digunakan dalam mengidentifikasi api dan asap pada frame-frame video.
3. Analisis
3.1 Masalah-Masalah dalam Pendeteksian
Sebelum masuk tahap perancangan, ada beberapa masalah yang harus dapat diatasi dalam pendeteksian (Bouwmans dkk., 2008), yaitu:
1. Pergerakan background (Movement in the Background / MB)
Pergerakan background bisa berupa rekaman video yang tidak statik atau bergoyang sehingga dapat membuat background menjadi foreground (obyek bergerak).
2. Perubahan cahaya yang bertahap (Gradual Illumination Change / TD)
Perubahan cahaya dapat membuat kesalahan dalam pendeteksian karena mengakibatkan perbedaan sebagian besar citra dari frame sebelumnya.
3. Gerakan obyek pada background (Moved Background Object / MBO)
Gerakan yang terjadi bila ada obyek pada background yang sebelumnya diam kemudian bergerak misalnya seperti gerakan cabang-cabang pohon yang tertiup angin.
4. Obyek masuk kedalam background (Inserted Background Object / IBO)
Apabila ada obyek yang tiba-tiba masuk kedalam background maka bisa terdeteksi sebagai suatu gerakan, misalnya ada burung atau hewan yang terbang melintas secara tiba-tiba dan bisa menjadi masalah bila mempunyai kemiripan dengan api atau asap.
5. Gerakan obyek pada background yang kemudian berhenti (Sleeping Foreground Object / SFO)
Gerakan ini sering terjadi dalam pendeteksian dikarenakan faktor lingkungan yang berubah-ubah dan indikasi bahwa obyek yang bergerak pada suatu saat akan berhenti.
6. Waktu pemrosesan (Computational Time / CT)
Tantangan dalam pemrosesan dalam video yaitu waktu komputasinya. Semakin rumit algoritma yang digunakan dalam memproses setiap frame maka semakin lama waktu yang diperlukan. Selain itu ukuran citra setiap frame yang diproses juga mempengaruhi lamanya waktu komputasi. Oleh karena itu diperlukan algoritma sederhana tetapi dapat menangani sebagian besar masalah – masalah utama dalam pendeteksian.
7. Memori yang digunakan (Memory Requirement / MR)
Program yang bagus adalah program yang tidak memakan banyak memori dalam prosesnya sehingga tidak memerlukan sumber daya yang besar yang mengakibatkan keefisiensian dalam hal biaya.
3.2 Perancangan Logika
Perancangan logika terdiri dari algoritma deteksi gerakan, algoritma tambahan untuk menangani masalah yang terjadi dalam pendeteksian dan segmentasi api dan asap.
3.2.1 Algoritma Deteksi Gerakan
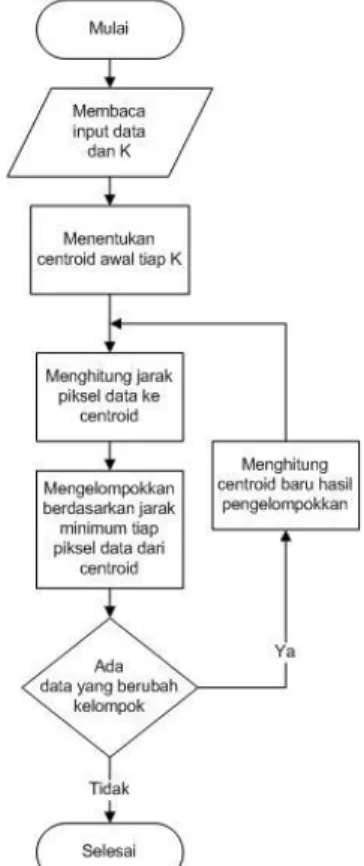
Algoritma deteksi gerakan menggunakan metode Mixture of Gaussian. Mixture of Gaussian dapat memodelkan background dan memisahkan foreground dari setiap frame berdasarkan tingkat kemunculan dan variasi pada masing-masing komponen Gaussian. Metode Mixture of Gaussian mendeteksi setiap gerakan yang terjadi pada video dengan membandingkan parameter frame sebelumnya dengan frame sekarang yang terlebih dulu dibagi menjadi K komponen Gaussian. Setiap K komponen ditentukan mempunyai bobot awal dan varian yang sama dengan rata-rata yang berbeda. Rata-rata tiap komponen Gaussian ditentukan dengan algoritma K-Means. Bagan alir dari algoritma K-Means ditunjukkan pada Gambar 3.1 :
Input data algoritma K-Means berupa frame dan K merupakan jumlah komponen Gaussian. Centroid awal ditentukan pada masing-masing K kemudian setiap piksel data pada frame dihitung jaraknya dari centroid masing-masing K. Pengelompokkan piksel data ke dalam K klaster berdasarkan jarak minimum piksel data dari centroid. Proses ini berlangsung sampai tidak ada piksel data yang berubah kelompok. Centroid yang dihasilkan dari algoritma K-Means digunakan sebagai rata-rata komponen Gaussian pada metode Mixture of Gaussian. Gambar 3.2 menunjukkan bagan alir dari metode Mixture of Gaussian.
Gambar 3.2 Bagan Alir Mixture of Gaussian
Proses deteksi gerakan berlangsung per frame dan bila selisih piksel data
dengan rata-rata di frame sekarang lebih kecil dari 2,5* (Teorema 2.1) maka
parameter bobot rata-rata dan standar deviasi di-update. Peringkat ditentukan dari rasio bobot dengan standar deviasinya dan diurutkan dari yang terbesar sampai terkecil. Background ditentukan dengan kriteria mempunyai bobot kemunculan yang besar tetapi dengan varian gerakan yang kecil. Kemudian yang lain ditentukan sebagai foreground. Bila tidak ada kecocokan maka dibuat parameter baru
untuk dan (Teorema 2.2). Proses menuju ke frame selanjutnya sampai semua frame terproses.
3.2.2 Segmentasi Api dan Asap
Segmentasi api dan asap dilakukan dalam ruang warna RGB. Ruang warna RGB mempunyai berbagai kelebihan yaitu mencakup pencahayaan (illumination).
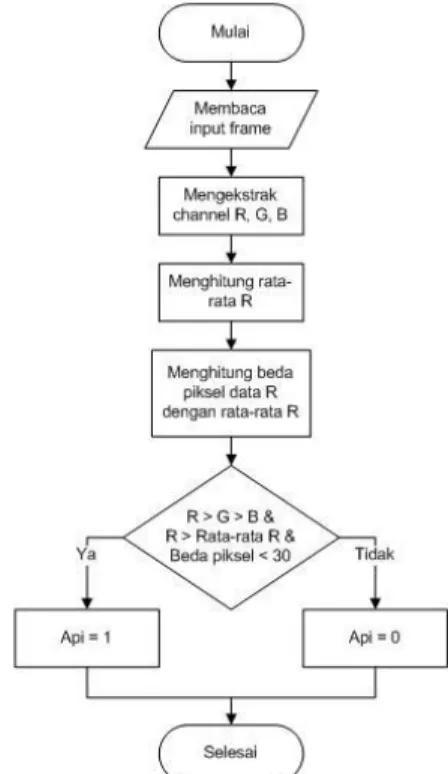
Api mempunyai tingkat pencahayaan yang tinggi dan komponen merahnya yang lebih tinggi dari yang lain. Dari kriteria tersebut, cukup mudah untuk menentukan kriteria piksel api dari kelebihan-kelebihan yang terdapat pada ruang warna RGB. Tapi perlu diketahui bahwa api dalam jarak yang dekat dengan kamera bisa berubah warnanya seperti dengan background-nya dan pencahayaan yang terlalu tinggi bisa membuat seolah-olah warna apinya adalah putih tembus pandang (translucent). Segmentasi api dilakukan dengan mengekstrak frame dalam ruang warna RGB menjadi komponen warna merah, hijau dan biru. Komponen warna merah digunakan dalam segmentasi ini karena merupakan warna dominan dari api. Warna merah api selalu lebih tinggi dari rata-rata komponen warna merahnya dan warna merah selalu lebih tinggi nilainya dibanding warna hijau dan warna hijau lebih tinggi nilainya daripada warna biru (Celik dkk., 2006). Dari percobaan beberapa video yang memuat
piksel api didapat bahwa warna piksel api berkisar antara 225 . Dari syarat tersebut didapat segmentasi piksel api dari frame. Gambar 3.4 menunjukkan diagram alir untuk segmentasi api.
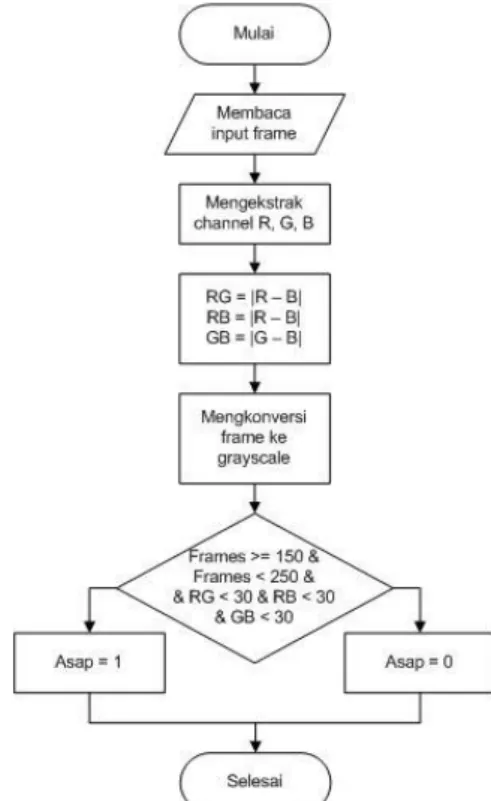
Asap pada umumnya mempunyai kriteria warna putih keabu-abuan. Untuk memunculkan warna abu-abu nilai warna merah, hijau dan biru tidak berbeda jauh setiap pikselnya. Selisih antara piksel merah dengan hijau, piksel merah dengan biru dan piksel hijau dengan biru kurang dari 30, nilai pikselnya lebih tinggi dari 150 dan kurang dari 250 dalam ruang warna grayscale. Diagram alir segmentasi asap ditunjukkan pada Gambar 3.5.
Gambar 3.5 Bagan Alir Segmentasi Asap 4. Implementasi dan Pembahasan
4.1 IMPLEMENTASI
4.1.1 Pembuatan GUI (Graphical User Interface) dengan MATLAB
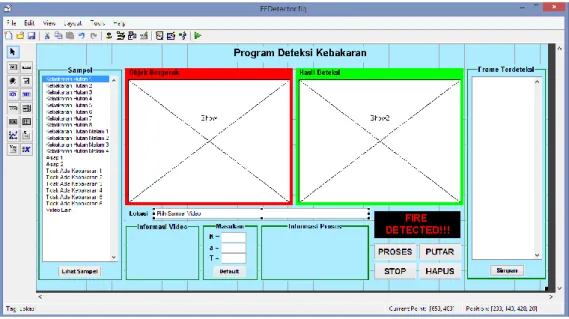
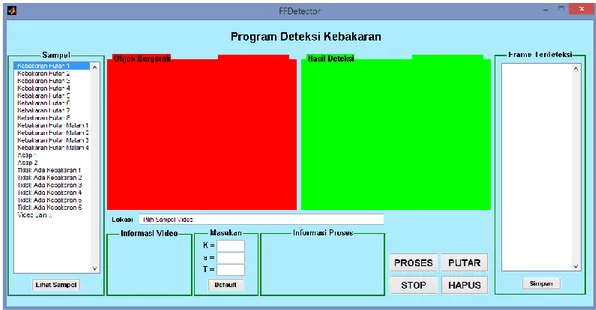
Program deteksi kebakaran dibuat menggunakan perangkat lunak MATLAB. Berkas GUI diberi nama FFDetector.fig dan listing programnya disimpan dalam berkas FFDetector.m. Tampilan figure GUI FFDetector ditunjukkan pada Gambar 4.1.
Gambar 4.1 Tampilan Figure GUI 4.1.2 Tagname pada GUI
Tagname merupakan nama-nama setiap komponen yang ada pada GUI. Tagname digunakan untuk memanggil komponen dalam suatu fungsi yang secara default formatnya yaitu handles.tagname. Daftar tagname yang digunakan dalam GUI FFDetector ditunjukkan pada Tabel 4.1. Daftar tagname juga bisa dilihat pada Object browser.
Tabel 4.1 Tagname Komponen pada GUI FFDetector
Nama Jenis Fungsi
FFDetector figure GUI dari program deteksi kebakaran PROSES Push button Memproses video untuk dideteksi
CLEAR Push button Menghapus isi input dan hasil pemrosesan sebelumnya
PLAY Push button Memutar berkas video hasil pemrosesan yang telah disimpan dalam hardisk
STOP Push button Menghentikan proses yang berjalan
Previews Push button Memutar sampel video yang dipilih dari daftar video Default Push button Mengisi input ke nilai default
Save Push button Menyimpan daftar frame terdeteksi pada berkas logframe.txt
Frame Static text Menampilkan status frame yang sedang diproses Frame1 Static text Menampilkan status frame yang sedang diproses FDetect Static text Menampilkan jumlah frame terdeteksi
Info2 Static text Menampilkan status informasi proses Timer Static text Menampilkan kecepatan pemrosesan
NFrames Static text Menampilkan jumlah semua frame dalam video FRate Static text Menampilkan frame rate video
VFormat Static text Menampilkan format video Bitrate Static text Menampilkan pixel depth video Durasi Static text Menampilkan durasi video VidSize Static text Menampilkan ukuran video
Status Static text Menampilkan pesan “FIRE DETECTED!!!” bila ada frame terdeteksi sebagai kebakaran
Show Axes Menampilkan frame (layar GUI) Show2 Axes Menampilkan frame (layar GUI) inK Edit text Tempat memasukkan input K ina Edit text Tempat memasukkan input a inT Edit text Tempat memasukkan input T
Lokasi Edit text Menampilkan lokasi penyimpanan sampel video ListFDetected Listbox Menampilkan daftar frame yang terdeteksi Listsampel Listbox Menampilkan daftar sampel video yang akan diuji
4.1.3 Cara Kerja Algoritma Deteksi Kebakaran
Proses pendeteksian dilakukan dengan memilih salah satu sampel video lalu memasukkan input yang diperlukan pada bagian masukan. Sampel video yang diuji dibaca frame pertamanya untuk digunakan sebagai inisialisasi awal parameter bobot, mean, dan standar deviasi. Mean didapat dari algoritma K-Means yang diterapkan pada frame pertama. Setelah proses inisialisasi awal selesai, proses dilanjutkan di tiap frame.
Frame yang diproses dipisahkan piksel api dan asapnya dengan fungsi FFSeg1 kemudian frame diubah menjadi grayscale untuk diproses dengan Mixture of Gaussian. Mixture of Gaussian mendeteksi gerakan dari selisih piksel antara frame
dengan rata-rata setiap komponen Gaussian. Bila selisihnya lebih kecil dari 2,5* , berarti memenuhi syarat kecocokan sehingga parameter bobot, mean dan standar deviasinya di-update. Parameter perlu di-update agar nilai rasio untuk dianggap
sebagai background tinggi. Bagi piksel data yang lebih besar dari 2,5* hanya di-update parameter bobotnya saja. Parameter bobot mewakili tingkat kemunculan pada frame. Setelah di-update, parameter bobot harus dinormalisasi lagi agar rentangnya selalu 0-1. Nilai background diisi dengan nilai awal background ditambah rata-rata
dikalikan dengan bobot. Piksel data pada komponen yang tidak memenuhi syarat kecocokan dibuatkan komponen baru.
Peringkat ditentukan dari perbandingan bobot dan standar deviasi setelah maintenance parameter dilakukan. Peringkat digunakan untuk menentukan piksel data yang diproses terlebih dulu dalam pemilihan background. Pemilihan background menggunakan bobot yang sudah diurutkan sesuai peringkat dari nilai yang paling tinggi ke nilai yang paling rendah. Bila bobot lebih kecil dari threshold background dan
selisih frame dengan rata-rata setiap komponen Gaussian lebih kecil dari 2,5* , maka piksel data dianggap sebagai background. Iterasi akan berhenti bila kecocokan background sudah ditemukan atau semua komponen Gaussian sudah diproses. Piksel data yang tidak cocok dengan kriteria background dianggap sebagai foreground sementara, untuk diseleksi lagi dengan kriteria api dan asap dari fungsi FFSeg1. Proses seleksi dilakukan dengan membandingkan nilai biner dari frame hasil segmentasi api dan asap dengan nilai biner dari foreground. Bila memenuhi kriteria api atau asap maka piksel data dianggap sebagai foreground. Proses berlangsung sampai semua piksel data pada frame pada video dikelompokkan sebagai background atau foreground.
Foreground difilter dengan median filter untuk menghilangkan salt and pepper noise. Foreground harus memenuhi syarat region lebih dari 50 piksel. Foreground yang memenuhi syarat tersebut diberi tanda kotak merah untuk dianggap sebagai lokasi kebakaran. Proses terus berlanjut sampai semua frame pada sampel video diproses. Daftar frame yang terdeteksi akan bertambah bila ada frame yang dideteksi memuat kebakaran. Alarm akan berbunyi apabila lebih dari 30 frame pada video terdeteksi sebagai kebakaran.
4.2 PEMBAHASAN
4.2.1 Pengujian Metode Deteksi Kebakaran
Pengujian dilakukan dengan mengaplikasikan metode deteksi kebakaran pada sampel video dengan program FFDetector. Sampel video memuat kondisi-kondisi yang meliputi MB, TD, MBO, IBO, SFO dan obyek yang mirip dengan api.
Pengujian pertama kali dilakukan dengan mengaplikasikan metode deteksi kebakaran pada sampel video. Langkah-langkah mengaplikasikan metode deteksi kebakaran pada sampel video adalah sebagai berikut:
GUI FFDetector dijalankan dengan menekan tombol run dibagian atas figure window. Tampilan GUI setelah dijalankan ditunjukkan pada Gambar 4.6.
Gambar 4.6 Tampilan GUI saat Dijalankan
Salah satu sampel video pada daftar sampel dipilih lalu input yang diperlukan dimasukkan pada bagian Masukan seperti yang ditunjukkan pada Gambar 4.7. Pengujian menggunakan nilai input K = 5, a = 0,005 dan T = 0,25.
Gambar 4.7 Memilih Sampel Video 4.2.2 Pembahasan Hasil
Secara keseluruhan, metode deteksi kebakaran secara dini pada video berbasis pengolahan citra dapat mendeteksi dengan baik kebakaran baik siang hari maupun malam hari. Metode ini dapat mengatasi masalah pendeteksian akibat benda yang mirip dengan api atau asap dan dapat mengatasi hasil video dari kamera yang tidak terlalu banyak bergerak. Kendala utama kesalahan pendeteksian disebabkan oleh hasil rekaman video yang banyak bergerak dan perubahan cahaya yang tiba-tiba. Rekaman video yang banyak bergerak menyebabkan false positif pada
benda-benda yang mirip dengan api atau asap. Perubahan cahaya yang mendadak membuat perbedaan piksel pada background sehingga terdeteksi sebagai gerakan.
Waktu pemrosesan tergolong cepat untuk proses yang cukup berat. Waktu pemrosesannya pada video beresolusi 176x144 lebih cepat dibandingkan dengan video beresolusi 300x240. Perbedaan kecepatan ini terjadi karena pemrosesan dilakukan disetiap piksel data tiap frame yang ada dalam video. Semakin besar resolusi video maka proses akan semakin lama. Hasil deteksi bergantung dari ketepatan threshold dan learning rate alpha. Semakin besar learning rate maka semakin cepat foreground terdeteksi dan semakin cepat obyek bila terlalu lama bergerak akan dianggap sebagai background dan sebaliknya semakin kecil learning rate maka semakin lama foreground terdeteksi dan semakin lama obyek yang terlalu lama bergerak akan dianggap sebagai background. Learning rate alpha yang baik dari hasil percobaan bernilai awal 0,01 dengan lower bound 0,005. Threshold sangat penting untuk menentukan klasifikasi background dan berbeda-beda untuk jumlah sebaran Gaussian yang berbeda. Dari percobaan didapat threshold yang baik yaitu 1/K + 0,05.
Kemunculan api atau asap pada rekaman video sangat berpengaruh pada tingkat keakuratan metode. Pada dasarnya metode deteksi kebakaran ini mencari gerakan atau perbedaan piksel dari inisialisasi awal yang diambil dari frame pertama. Video yang sudah terdapat api atau asap pada frame pertama menyebabkan kecepatan metode dalam mendeteksi kebakaran menurun. Dibutuhkan waktu beberapa detik agar gerakan api atau asap dapat terdeteksi.
5. Kesimpulan 5.1 Kesimpulan
Dari hasil percobaan dan pengujian metode deteksi kebakaran berbasis pengolahan citra pada sampel video yang telah dilakukan, dapat diambil beberapa kesimpulan sebagai berikut:
1. Metode ini mampu mendeteksi kebakaran pada siang hari dengan baik dengan kesalahan sekitar 2,133 % dan keakuratan deteksi 71,68% dari 8 sampel pengujian.
2. Metode ini mampu mendeteksi kebakaran pada malam hari dengan baik tanpa ada kesalahan dengan keakuratan deteksi 87,12% dari 4 sampel pengujian. 3. Metode ini mampu mendeteksi asap dengan baik tanpa ada kesalahan dari 2
sampel pengujian.
4. Metode ini mampu mengatasi keadaan hutan yang tidak ada kebakaran dan kasus obyek yang mirip dengan api dan asap dengan baik dengan kesalahan sekitar 0,89 % dari 6 sampel pengujian.
5. Metode ini membutuhkan beberapa detik untuk dapat mendeteksi kebakaran pada rekaman video sudah terjadi kebakaran hutan sejak frame pertama. 6. Metode ini mampu mendeteksi kebakaran hutan dengan baik pada rekaman
video yang relatif statik dan pada perubahan cahaya yang bertahap.
7. Kesalahan terutama terjadi akibat rekaman video yang kameranya banyak bergerak dan perubahan cahaya yang mendadak.
5.2 Saran
Beberapa saran dari penulis untuk pengembangan metode deteksi kebakaran lebih lanjut sebagai berikut:
1. Peletakan posisi kamera untuk hasil rekaman video dan pendeteksian yang baik yaitu lebih tinggi dari pohon dan menghadap agak ke bawah sebatas lingkup area pepohonan saja. Hal ini berguna untuk menghindari perubahan cahaya yang mendadak dari awan yang menutup matahari, gerakan awan yang agak cepat dan warna langit saat pagi dan sore. Kamera harus dipasang statik pada posisinya.
2. Kualitas rekaman video harus baik dan tidak boleh ada fitur-fitur kamera seperti pencahayaan otomatis saat rekaman menjadi gelap agar tidak ada perubahan cahaya yang mendadak.
3. Metode deteksi kebakaran pada video berbasis pengolahan citra dapat dikembangkan untuk dapat mendeteksi kebakaran hutan secara real time baik dari satu atau lebih kamera pemantau dengan memperhatikan aspek kualitas kamera, jaringan, dan komputer server.
Daftar Pustaka
Bouwmans, T., El Baf, F., dan Vachon, B., 2008. Background Modeling using Mixture of
Gaussians for Foreground Detection – A Survey, Recent Patents on Computer
Science 1, 219-237.
Celik, T., Demirel, H., dan Ozkaramanli, H., 2006. Automatic Fire Detection in Video
Sequence. 14th European Signal Processing Conference (EUSIPCO). Florence.
Italy.
Fang, C. dan Ralescu, A.L., 2008. Online Gaussian Mixture Model for Concept Modeling
and Discovery. University of Cincinnati. USA.
Gonzalez, R.C., Woods, R.E. 2002. Digital Image Processing Using Matlab. Prenctice Hall. NJ.
Power, P.W., Schoonees, J.A. 2002. Understanding background mixture models for
foreground segmentation, Proceeding Image and Vision Computing New Zealand
(IVCNZ 2002). Auckland. NZ.
Stauffer, C. and Grimson, W.E.L. 1999. Adaptive background mixture models for
real-time tracking. Proc IEEE Conf on Computer Vision and Pattern Recognition (CVPR
1999). 246-252.
Weisstein, E.W. 2005. K-Means Clustering Algorithm, http://mathworld.wolfram.com/K-MeansClusteringAlgorithm.html, 16 September 2005, diakses tanggal 7 juni 2014.