1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Sekarang ini videografi semakin banyak digunakan, diantaranya sebagai media monitoring keadaan sekitar, pembuatan film dan peningkatan keamanan. Pada dasarnya teknik videografi hampir mirip dengan close range photogrametry, hanya saja perbedaannya terletak saat proses akuisisi data yaitu perekamannya dilakukan dalam format video. Semakin berkembangnya khazanah ilmu pengetahuan dan teknologi serta bermunculannya berbagai macam program aplikasi yang mampu mendukung penemuan-penemuan baru saat ini menyebabkan teknik videografi dapat pula digunakan untuk pembuatan visualisasi dan pemodelan obyek secara 3D baik itu dalam bidang konstruksi bangunan, arsitektur dan lain sebagainya. Penggunaan teknik ini mempermudah pemodelan 3D yang dapat dibuat dengan sederhana dan murah biaya. Remondino pada tahun 2006 melakukan penelitian untuk memodelkan dan merekonstruksi objek yang diam dan bergerak misal manusia dengan menggunakan foto yang direkam dengan teknik fotogrametri terestris, yang tujuan utamanya adalah bisa melakukan otomatisasi ekstraksi pada objek dan memudahkan proses pemodelan.
Hasil ekstraksi perekaman obyek dengan menggunakan teknik videografi selain image yang dihasilkan untuk memodelkan obyek secara 3D, videografi mampu menampilkan pergerakan dari obyek yang direkam. Pergerakan tersebut terlihat dari trayektori yang digambarkan sebagai alur dan arah suatu benda yang bergerak. Hal tersebut akan memudahkan jika akan dilakukan analisis pergerakan terkait ketelitian posisi pergerakan obyek tersebut apabila direkam menggunakan teknik videografi. Hasil perekaman dengan menggunakan teknik videografi dapat menjadi teknik alternatif untuk mendapatkan hasil pengukuran 3D dari pengamatan secara 2D. Pergerakan obyek secara 3D ini bisa dipakai dalam pembuatan animasi real world yang sederhana, video game maupun sebagai media untuk penyajian presentasi. Berdasarkan hal tersebut maka penelitian ini mengaplikasikan teknik videografi untuk pengamatan dan analisis trayektori suatu obyek yang bergerak yang divisualisasikan dalam bentuk animasi 3D.
I.2. Rumusan Masalah Rumusan masalah yang ada pada penelitian ini adalah
1. Bagaimana hasil tampilan pergerakan obyek bergerak yang direkam dengan teknik videografi?
2. Berapa tingkat ketelitian posisi pergerakan obyek yang bergerak yang direkam dengan teknik videografi?
I.3. Tujuan Penelitian
Penelitian ini bertujuan untuk melakukan deteksi dan pemodelan gerakan obyek bergerak menggunakan teknik videografi.
I.4. Manfaat Penelitian
Penelitian ini dapat dijadikan dasar pengembangan ilmu untuk memberikan gambaran secara visual pergerakan suatu benda yang direkam menggunakan teknik videografi dan bisa memodelkan pergerakan dari benda tersebut secara 3 dimensi sehingga dapat memudahkan dalam melakukan analisis dari obyek yang bergerak itu sendiri serta dapat diimplementasikan untuk pembuatan animasi secara real dari peristiwa yang terjadi di lapangan.
I.5. Batasan Masalah
Agar pembahasan lebih mengacu terhadap pokok permasalahan dalam obyek penelitian yang ada, maka diperlukan adanya pembatasan-pembatasan masalah. Batasan tersebut adalah :
1. Analisis yang dilakukan hanya beracuan pada pergerakan benda geometris sederhana berupa bola.
2. Koordinat posisi bola menggunakan posisi koordinat lokal.
I.6. Tinjauan Pustaka
Astuty (2013) dalam penelitiannya menggunakan teknik videografi untuk mengetahui kerapatan arus lalu lintas di ruas jalan Diponegoro, Ungaran yang digunakan untuk analisis pengembangan jalan tersebut. Hasil dari penelitian tersebut menunjukkan bahwa nilai kerapatan arus lalu lintas di jalan Diponegoro, Ungaran paling tinggi terdapat pada hari Senin pagi pukul
06.30 – 07.30 yaitu 82 smp/km. Pada penelitian kali ini teknik videografi diterapkan untuk mendeteksi dan menganalisis gerakan posisi 3D suatu obyek berupa koordinat X, Y, dan Z yang nantinya akan dimodelkan dalam bentuk animasi 3D dan dilakukan analisis terkait ketelitian posisi obyek yang bergerak. Perekaman obyek juga dilakukan dengan menggunakan lebih dari 1 buah kamera video.
Elgammal dkk (2009) melakukan penelitian terkait deteksi kulit yang dilakukan pada citra berwarna dan video. Penelitian tersebut menawarkan suatu cara efisien untuk mencari lokasi piksel kulit berwarna sehingga mampu diterapkan untuk mendeteksi keberadaan wajah manusia dan tangan dalam lingkungan yang terkendali dimana latar belakang tidak mengandung nilai warna dari kulit. Pada penelitian tersebut deteksi kulit tergantung pada lokasi piksel kulit berwarna sehingga penggunaanya terbatas pada citra berwarna, dan tidak dapat digunakan pada citra hitam putih, infrared dan jenis citra lainnya yang tidak mengandung informasi warna. Penelitian yang hampir mirip juga dilakukan oleh Shan (2010) yang memperkenalkan cara terbaru untuk pendeteksian wajah dan identifikasi orang yang berfokus dengan pendekatan berbasis video. Selain itu deteksi dengan menggunakan video juga dilakukan oleh Viola dkk (2005) dengan mengambil obyek kajian penelitian berupa pejalan kaki. Penelitian tersebut mendeskripsikan tentang sistem pendeteksian pejalan kaki dengan menggunakan algoritma deteksi lebih dari 2 buah frame video berturut-turut. Deteksi pejalan kaki merupakan salah satu aplikasi pengawasan yang sukar karena resolusi dari gambar sangat rendah. Kunci penelitian tersebut adalah menggunakan intensitas gambar yang diam sebagai input dan informasi gerak yang didapatkan dari ekstraksi pasangan gambar yang berurutan. Penelitian yang dilakukan oleh Elgammal dkk, Shan dan Viola dkk hanya sebatas pada deteksi keberadaan obyek saja tanpa adanya pengukuran posisi obyek tersebut. Pada penelitian kali ini selain deteksi obyek dari frame video juga akan dilakukan pengukuran 3D dari gambar 2D sehingga didapat koordinat x, y dan z dari obyek yang dikaji.
I.7. Landasan Teori I.7.1. Videografi
Videografi merupakan teknik yang dipakai untuk merekam obyek berupa frame demi frame dengan menggunakan sensor kamera video portable dalam interval waktu perekaman tertentu (Pringgo, 2010). Bentuk geometri pada saat proses akuisisi data untuk merekam satu frame penuh foto dari teknik videografi menggunakan sistem sentral atau proyektif.
Pada dasarnya geometri suatu obyek hasil teknik videografi ini hampir mirip dengan geometri hasil perekaman teknik close range photogrammetry yaitu menggunakan geometri kolinearitas teristris.
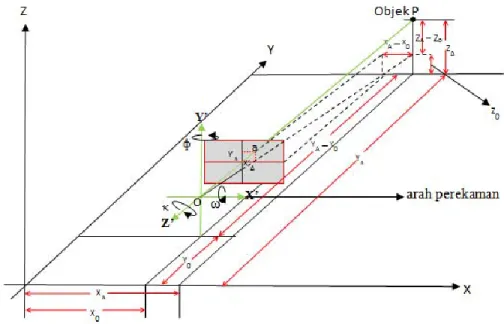
Gambar I.1. Geometri kolinearitas terestris (Wolf, 1983)
Keterangan :
X0, Y0, Z0 = koordinat tempat pemotretan
XA, YA, ZA = koordinat obyek (koordinat tanah)
ω ,ф, κ = sudut rotasi pada sumbu X‟,Y‟, Z‟ X‟A, Y‟A, Z‟A = koordinat foto
Geometri kolinearitas merupakan geometri yang menggunakan persamaan kolinearitas yang pada umumnya berisi 6 buah elemen orientasi luar (ω ,ф, κ, X0, Y0, Z0 ) dan koordinat titik
obyek (XA, YA, ZA ) pada tampilan foto. Persamaan kolinearitas digunakan untuk menentukan
posisi dan orientasi pada foto baik itu orientasi relatif dan orientasi absolut guna menentukan koordinat titik yang ada pada daerah overlap. Bentuk persamaan kolinearitas seperti berikut ini (Wolf,1983) :
X‟A = -f ……… (1)
Y‟A = -f ………. …. (2)
Berkaitan dengan penggunaannya, teknik videografi memiliki beberapa kelemahan bila dibandingkan dengan teknik fotografi diantaranya resolusi lebih rendah bila dibandingkan dengan foto konvensional, cakupan liputan lebih sempit (narrow coverage), adanya sistem interlace yang menyebabkan kesalahan pada pemakaian wahana yang bergerak (Meisner dan Lindstorm, 1985). Selain dari segi kelemahan di atas, teknik videografi juga memberikan nilai lebih dalam kecepatan dalam akuisisi data bila dibandingkan teknik fotogrametri. Pemanfaatan teknik ini bisa digunakan untuk memonitoring keadaan sekitar dan perubahan yang terjadi terhadap suatu obyek yang sedang diamati. Dalam penerapannya videografi mampu menampilkan pergerakan obyek dalam arah 3 dimensi yaitu pergerakan kearah sumbu X, Y dan Z. Untuk menghasilkan perekaman obyek yang baik, teknik videografi ini membutuhkan aspek pendukung berupa kamera video yang resolusinya tinggi.
I.7.1.1. Jenis Kamera. Kamera dapat dibedakan menjadi 4 tipe berdasarkan sistem perekamannya yang meliputi HDV camcorders, DV (termasuk SD/DVSP, DVC Pro, dan DVCAM) camcorders, kamera HD (termasuk HDCAM SR, DVC Pro HD, XDCam, dan format full HD lainnya), kamera digital cinema. Masing-masing kategori berbeda dalam segi harga, kualitas dan tujuan. Berikut Tabel I.1. karakteristik tipe kamera (Musburger, 2010).
Tabel I.1. Karakteristik Tipe-tipe Kamera
Tipe DV HDV HD BROADCAST DIGITAL
CINEMA Ukuran
Sensor
¼ inch - 1/3
inch 1/3 inch 1/2inch 2/3 inch
2/3inch hingga 35 mm
Harga Rendah Rendah-sedang Sedang-tinggi Tinggi Mahal
Tujuan Pengguna-semi profesional Rendah - level tengah professional Tengah –level tinggi profesional Pengguna berat broadcast – field/studio Pembuatan drama jangka panjang Perekaman
Medium miniDV miniDV/ media
penyimpanan P2, SxS, SD Cards P2, SxS, SD Cards, External feeds Raw Digital, Hard drive, external feed frame rasio (panjang x lebar)/line 4x3, 16x9, 720p 4x3,16x9, 720p, 1080p 4x3,16x9, 720p, 1080i dan p 4x3,16x9, 720p, 1080i dan p 16x9 , all line rates Zoom range lensa 3:1, 5:1 5:1 5:1-10:1 10:1-100:1 Fixed FL atau 10:1
I.7.1.2. Sistem Perekaman Video. Proses perekaman obyek dengan menggunakan video dilakukan dengan bantuan plat sensor foto solid state yang disebut dengan chips. Penggunaan chips bertujuan untuk mengubah konsentrasi cahaya yang terpantul pada lensa menjadi sinyal elektronik. Pada dasarnya lensa yang terdapat pada kamera video memiliki 3 fungsi utama yaitu sebagai media pengumpulan sinyal yang terpantul dari obyek, media pengontrol banyaknya sinyal yang melewati lensa, memfokuskan foto pada permukaan foto sensitif di kamera. Chips yang sensitif terhadap cahaya juga dikenal dengan sebutan CCD (Charge Couple Device). Ukuran chips bervariasi dari 1/3 inch hingga 35 mm (Musburger, 2010). Proses pelacakan perpindahan (displacement) suatu obyek dapat dilakukan apabila posisi kamera tetap stabil dan tidak berubah posisi selama proses perekaman obyek, untuk itu penggunaan tripod sangatlah penting dalam menghilangkan kemungkinan gangguan luar karena pergerakan manusia.
I.7.2. Jenis Target
Selama pengambilan dan perekaman obyek dengan menggunakan kamera video, permukaan obyek yang akan dipotret harus diberi tanda (target) pada daerah yang dianggap dapat mewakili bentuk dari permukaan obyek tersebut.
1. Natural – Light Target merupakan jenis target yang paling sederhana dan kurang memberikan tingkat presisi yang tinggi dari suatu obyek, dapat dibuat menggunakan kertas, cat dan sebagainya. Target jenis ini tidak memendarkan cahaya.
2. Retro - Reflective Target target ini terbuat dari bahan retro–reflective yang mampu memendarkan cahaya kearah sumber cahaya. Sehingga target dapat diidentifikasi dengan mudah dan akurat walaupun gambar diambil dengan sudut yan cukup besar.
Selain itu menurut bentuknya target dibedakan menjadi 2 jenis yaitu 1. Target tanpa kode
Target yang tidak dapat diidentifikasi secara otomatis oleh perangkat lunak seperti Photomodeller, yang bentuknya hanya berupa lingkaran biasa . Proses pengidentifikasiannya dilakukan secara manual oleh perangkat lunak.
Gambar I.2. Target tanpa kode
2. Target berkode
Target yang dapat diidentifikasi secara otomatis oleh perangkat lunak seperti Photomodeller. Setiap target memiliki bentuk yang berbeda-beda untuk kode tertentu.
Gambar I.3. Target berkode
1.7.3. Kalibrasi Kamera
Kalibrasi kamera adalah tahapan yang dilakukan untuk menghitung nilai parameter orientasi dalam kamera. Parameter orientasi dalam dapat juga ditentukan dengan metode bundle block adjustment. Pada kamera non metrik pusat proyeksi berubah-ubah dipengaruhi oleh lensa dan distorsi film. Pengaruh tersebut dapat dihilangkan menggunakan metode bundle block adjustment dengan cara memberikan koreksi polynomial pada persamaan observasi (Kraus, 2007). Nilai parameter dalam kamera yang didapat dari hasil kalibrasi kamera meliputi panjang fokus (f), titik utama foto (X0, Y0) dan distorsi lensa baik itu distorsi radial dan tangensial.
Berikut ini adalah penjelasan dari masing-masing parameter orientasi dalam (Nafian, 2012): 1. Panjang fokus. Panjang fokus adalah jarak tegak lurus antara bidang proyeksi kamera
dengan titik pusat lensa. Panjang fokus biasanya dinotasikan dengan huruf (f).
2. Titik utama foto. Titik utama foto merupakan titik hasil proyeksi tegak lurus titik pusat proyeksi pada bidang foto. Titik utama foto biasanya dinotasikan dengan huruf (xp, yp).
3. Distorsi lensa. Distorsi lensa mengakibatkan titik citra pada foto bergeser dari posisi yang sebenarnya sehingga memberikan ketelitian pengukuran yang tidak baik. Distorsi lensa ada 2 macam, yaitu distorsi tangensial dan distorsi radial.
a) Distorsi tangensial merupakan distorsi yang disebabkan karena terdapat kesalahan saat melakukan pengaturan titik letak pusat lensa dalam suatu susunan lensa gabungan yang mengakibatkan pergeseran lensa secara geometrik foto, pergeseran tersebut merupakan pergeseran linier titik di foto pada arah normal (tegak lurus). Notasi untuk parameter distorsi ini adalah (P1dan P2). Rumus untuk memperlihatkan nilai distorsi
tangensial yang dikoreksikan terhadap koordinat foto adalah sebagai berikut ini : dtx = P1(r2 + 2x2) + 2P2xy . . . ………. (3)
dty = P2(r2 + 2y2) + 2P1xy . . . …... (4)
dengan :
P1, P2 : koefisien distorsi tangensial
dtx, dty : koreksi distorsi tangensial
r : jarak radial titik citra terhadap titik utama foto (mm) x,y : koordinat foto
b) Distorsi radial yang memiliki notasi (K1, K2, dan K3) merupakan pergeseran bayangan
ke arah radial terhadap titik utama dari posisi idealnya. Distorsi ini diakibatkan karena ketidaksempurnaan komposisi lensa sehingga sinar datang yang masuk melalui lensa kamera mengalami deviasi setelah melewati titik pusat proyeksi lensa. Persamaan untuk distorsi radial adalah:
x = x(ukuran) – xp . . . ……….. (5)
y = y(ukuran) – yp . . . ……… (6)
r2 = x2 + y2 . . . ……… (7)
dr = K1r2 + K2r4 + K3r6 . . . ………... (8)
dengan :
x(ukuran), y(ukuran) : koordinat hasil ukuran (mm) K1, K2, K3 : koefisien polinomial distorsi radial
dr : koreksi distorsi radial
r : jarak radial titik citra terhadap titik utama foto
x, y : koordinat foto
xp, yp : koordinat titik utama foto
Hasil pemotretan obyek yang akurat dapat diperoleh apabila kamera telah dikalibrasi. Pada saat pengolahan data berlangsung kalibrasi kamera dilakukan dengan menggunakan software pengolahan data. Menurut Hart (2012) metode kalibrasi dasar kamera didasarkan pada kertas kalibrasi bawaan software yang digunakan untuk mengkalibrasi kamera yang ingin dikalibrasi, metode dasar kalibrasi ada 2 macam meliputi :
1. Single Sheet Calibration (SSC) 2. Multi Sheet Calibration (MSC)
Metode yang lebih maju dalam proses kalibrasi kamera adalah Field Calibration (FC) yang merupakan suatu metode yang didasarkan pada satu set gambar sebenarnya dari obyek yang direkam beserta targetnya. Pemilihan metode kalibrasi dasar yang digunakan didasarkan pada skala dan luas area perekaman obyek pada suatu eksperimen. Setiap metode kalibrasi memiliki kelebihan penggunaan pada obyek tertentu. Metode Single Sheet Calibration (SSC) lebih baik
digunakan untuk objek yang relatif kecil, seperti dinding model skala kecil atau kolom di mana semua dimensi kurang dari 5 meter. Jika akan dilakukan pengujian suatu obyek yang relatif besar maka metode Multi Sheet Calibration (MSC) lebih efektif untuk digunakan.
1.7.4. Gerak Trayektori Bola
Bola merupakan salah satu bangun ruang tiga dimensi yang dibentuk oleh tak hingga lingkaran berjari-jari sama panjang dan berpusat pada satu titik yang sama. Bola hanya memiliki 1 sisi saja yang luas permukaannya dapat dihitung dengan rumus 4Πr2 sedangkan volume bola sama dengan 4/3 Πr3
. Bola juga memiliki tingkat kelastisan masing-masing. Ketika bola bergerak dan memantul suatu permukaan maka pergerakan dari bola tersebut akan menunjukkan berapa banyak energi yang hilang sebelum maupun sesudah bola tersebut mengenai permukaan. Tumbukan bola dengan suatu permukaan akan selalu melibatkan hilangnya beberapa energi. Pada dasarnya gerak bola naik turun ini memanfaatkan Hukum III Newton tentang gaya aksi reaksi. Ketika bola dilepaskan gaya gravitasi bumi menariknya jatuh ke lantai. Ketika bola bertumbukan dengan lantai, bola memberikan gaya aksi pada lantai, akibatnya lantai memberikan reaksi melawan gaya aksi ini yang menyebabkan bola memantul lagi ke atas. Namun karena sebagian energi bola terserap di lantai maka bola pantul tidak dapat mencapai ketinggian semula.
Sebagai contoh ketika bola dengan massa dengan notasi (m) jatuh dari suatu ketinggian pertama dengan notasi (h1) di atas suatu permukaan lalu bola tersebut terpantul kembali pada ketinggian kedua dengan notasi (h2), karena ada gaya gravitasi dengan notasi (g) maka dapat dihitung besarnya energi yang hilang sebesar mg (h1-h2). Hilangnya energi tersebut dapat di ekspresikan dengan nilai koefisien restitusi yang memiliki notasi (e) yang didefinisikan dalam sebuah permukaan keras suatu benda dengan rumus :
e = v2/v1 = ……… (9)
Kecepatan bola mula-mula ditunjukkan dengan notasi (v1) sedangkan kecepatan bola melambung (terpantul lagi) ditunjukkan dengan notasi (v2). Menurut Cross (1998) , waktu yang dilambangkan dengan notasi (to) yang dilalui bola sejak bola dijatuhkan dengan ketinggian awal berupa notasi (ho) dengan adanya gaya gravitasi maka dapat dihitung dengan rumus :
atau ……… (10)
Selang waktu yang memiliki notasi (t1) antara pantulan pertama dengan notasi (ho) dan pantulan kedua dengan notasi (h1) dapat dirumuskan :
= = ……….………….. (11)
Untuk waktu ke-n pantulan dan ke- (n+1) pantulan maka dapat dihitung dengan rumus :
tn = ……… (12)
1.7.5. Pemodelan 3 Dimensi
Pembuatan model 3D dapat diperoleh dari pertampalan 2 buah gambar yang merupakan sekumpulan titik-titik 3 dimensi (x, y, z) yang dapat merepresentasikan bentuk suatu obyek. Proses pembentukan model 3 dimensi membutuhkan suatu proses yang dinamakan orientasi relatif yang tujuannya untuk membuat garis-garis yang seasal bertemu atau menjadi satu titik yang berpotongan (kesebidangan). Untuk bisa menampilkan kesan 3D maka dilakukan perekaman terhadap obyek sedikitnya dilakukan dari 2 kedudukan kamera. Untuk melakukan restitusi dari titik 3 dimensi dibutuhkan pemotongan 2 sinar (dari foto ke titik obyek) atau satu sinar dengan permukaan yang termasuk titik ini. Jika obyek terdapat pada lebih dari 2 buah foto, titik 3D yang terbentuk dari perpotongan lebih dari 2 sinar maka mendapatkan posisinya digunakan bundle solution. Untuk merekonstruksi bangunan yang kompleks 2 buah foto saja tidak cukup sehingga dibutuhkan banyak foto yang mencakup seluruh bagian obyek (Sukoco, 2003).
Pemodelan 3 dimensi sangat diperlukan dalam berbagai aplikasi misalnya aplikasi robotik, keperluan visualisasi, animasi, tampilan multimedia. Dalam hal ini, kebutuhan akan model 3 dimensi berubah seiring dengan perubahan kebutuhan zaman yang membutuhkan kualitas visual dari hasil visualisasi nyata yang lebih akurat. Pemodelan 3 dimensi dapat diperoleh dengan menggunakan data foto, sensor jarak ataupun kombinasi keduanya bahkan bisa dimasukkan informasi lain seperti dari CAD, surveying, dan data GPS untuk membantu memodelkan
(Remondino, 2006). Kualitas akurasi pemodelan 3D yang dibuat dengan menggunakan Photomodeller Scanner dipengaruhi oleh (PhotoModeler Help, 2013) :
1. Kualitas kalibrasi kamera.
Kalibrasi digunakan untuk menentukan parameter orientasi dalam kamera sehingga pemrosesan foto yang melibatkan kalibrasi kamera akan memberikan akurasi hasil yang lebih tinggi.
2. Resolusi kamera.
Semakin besar resolusi piksel kamera, semakin tinggi akurasi yang akan diperoleh. Hal tersebut berhubungan dengan resolusi spasial yang akan dihasilkan, karena semakin tinggi resolusi spasial maka semakin presisi pula proses penandaan titik pada foto.
3. Geometri posisi kamera.
Selama proses pengolahan data berlangsung, PhotoModeler Scanner akan memperhitungkan posisi dan sudut kamera pada setiap foto atau disebut dengan orientasi. Kualitas orientasi akan menentukan ketelitian dari posisi titik pada foto.
4. Presisi penandaan titik.
Presisi penandaan titik juga menjadi salah satu indikator dalam penentuan kualitas project. Kesalahan dalam penandaan titik akan mempengaruhi keseluruhan akurasi titik sehingga perlu dilakukan eliminasi terhadap kesalahan penandaan titik yang terlalu besar.
Setelah obyek dimodelkan dan mendapatkan posisi 3 dimensi selanjutnya penelitian ini akan membuat animasi pergerakan posisi obyek yang termodelkan tadi, tujuannya adalah untuk menampilkan gerak bola hasil perekaman video dengan memberikan kesan yang lebih nyata, interaktif dan komunikatif. Definisi animasi sendiri merupakan media untuk menampilkan informasi dan permainan efek suara dan gerakan yang menarik minat pengguna dalam bentuk 3 dimensi berdasarkan virtual reality sehingga pesan yang disampaikan lebih mudah dipahami oleh pengguna. Virtual reality adalah image dalam komputer atau dalam dunia lain (maya) yang dapat membuat orang merasa berada dalam dunia nyata dan dapat melakukan operasi dan kontrol dari sistem seperti kehidupan sesungguhnya (Budi, 2003).
1.7.6. Deteksi Gerakan
Pendeteksian gerakan merupakan upaya menangkap obyek yang bergerak dengan membandingkan image pada deretan frame berjalan (video). Deteksi gerakan dilakukan dengan mencari perbedaan yang terjadi antara deretan citra video. Pertama deretan citra video dipecah dalam bentuk frame yang diikuti dengan perhitungan perbedaan antara frame yang berurutan. Perbedaan yang terjadi menggambarkan gerakan yang terjadi. Deteksi gerak juga merupakan salah satu metode yang digunakan dalam sistem pengawas ruangan, dimana dalam sistem tersebut mampu mendeteksi pergerakan dalam area jangkauan yang dapat diamati oleh kamera. Ada beberapa metode yang dapat diterapkan dalam melakukan deteksi gerak dintaranya yaitu dengan cara membandingkan frame awal dengan frame selanjutnya yang terus berjalan pada kamera video. Apabila posisi obyek yang terlihat di frame awal berbeda dengan posisi obyek yang ada di frame selanjutnya maka dapat dikatakan obyek bergeser dalam hal ini posisi kamera harus tetap diam dan tidak bergeser (Sairun, 2007). Pengaplikasian deteksi gerakan dengan menggunakan video merupakan dasar dari berbagai penerapan strategi video pengawasan yang tujuannya meliputi (Rahman, 2008) :
1. Menentukkan waktu suatu obyek baru memasuki sistem jangkauan pandang, dan menginisialisasi model pergerakannya.
2. Menghitung korespondesi jarak antara latar bagian depan yang dideteksi dari pengurangan latar di belakangnya dan obyek yang sedang dilacak.
3. Menggunakan algoritma pelacakan untuk memperkirakan posisi masing-masing obyek dan memperbaharui gerakan model yang digunakan untuk pelacakan. Tujuannya adalah untuk memodelkan gerakan obyek keseluruhan.
Selain diaplikasikan pada video pengawasan, deteksi gerakan obyek juga dapat diaplikasikan untuk mendeteksi dang melacak manusia pada berbagai aplikasi seperti berikut (Jing, 2007):
1. Ruang cerdas (smart space)
Smart space merupakan konsep ruang yang memungkinkan pendeteksian dan pelacakan orang yang berada di dalam ruangan, membantu memahami interaksi antara orang-orang dan membantu menyediakan pelayanan yang baik.
Pendeteksian gerakan manusia dan pelacakan menyediakan beberapa kemungkinan komputer agar bisa digunakan untuk memahami manusia secara real time dengan memproses video dari satu atau lebih kamera yang disambungkan pada komputer. Dengan metode yang lebih canggih mampu menganalisis pergerakan manusia dan mengizikan orang untuk mengontrol dan memberikan perintah lebih canggih pada sistem komputer atau multimedia database.
Deteksi obyek dan pelacakan sangat berkaitan satu sama lain. Pada umumnya sistem pelacakan diawali dari pendeteksian obyek. Ketika obyek sebagai target hilang, deteksi gerakan diperlukan lagi untuk mengulangi kembali dan melanjutkan pelacakan. Pada proses deteksi obyek dan pelacakan, penggunaan banyak kamera memberikan keuntungan yang lebih banyak bila dibandingkan hanya menggunakan satu buah kamera saja. Berikut aspek – aspek keuntungan penggunaan banyak kamera (Jing, 2007):
1. Cakupan wilayah lebih luas
2. Meminimalkan efek dari kesendatan obyek 3. Mendapatkan informasi 3D dari target obyek 4. Memiliki seleksi titik tampilan yang lebih banyak