BAB V KALIBRASI DAN PENGUJIAN SISTEM 72
BAB V
KALIBRASI DAN PENGUJIAN SISTEM
5.1 Kalibrasi
Pengertian kalibrasi menurut ISO adalah seperangkat operasi dalam kondisi tertentu yang bertujuan untuk menentukan hubungan antara nilai-nilai yang ditunjukkan oleh alat ukur atau sistem pengukuran atau nilai yang ditunjukkan material ukur dengan nilai measurand yang telah diketahui.
Pengertian kalibrasi menurut ISO/IEC Guide 17025:2005 dan Vocabulary of International Metrology (VIM) adalah serangkaian kegiatan yang membentuk hubungan antara nilai yang ditunjukkan oleh instrumen ukur atau sistem pengukuran, atau nilai yang diwakili oleh bahan ukur, dengan nilai-nilai yang sudah diketahui yang berkaitan dari besaran yang diukur dalam kondisi tertentu. Dengan kata lain, kalibrasi adalah kegiatan untuk menentukan kebenaran konvensional nilai penunjukkan alat ukur dan bahan ukur dengan cara membandingkan terhadap standar ukur yang mamputelusur (traceable) ke standar nasional untuk satuan ukuran dan/atau internasional.
Tujuan kalibrasi adalah untuk mencapai ketertelusuran pengukuran. Hasil pengukuran dapat dikaitkan/ditelusur sampai ke standar yang lebih tinggi/teliti (standar primer nasional dan / internasional), melalui rangkaian perbandingan yang tak terputus.
BAB V KALIBRASI DAN PENGUJIAN SISTEM 73
Manfaat kalibrasi adalah sebagai berikut :
• untuk mendukung sistem mutu yang diterapkan di berbagai industri pada peralatan laboratorium dan produksi yang dimiliki.
• Dengan melakukan kalibrasi, bisa diketahui seberapa jauh perbedaan
(penyimpangan) antara harga benar dengan harga yang ditunjukkan oleh alat ukur.
Untuk sensor yang digunakan pada sistem yang dibangun ini, kalibrasi dilakukan dengan membandingkan nilai suhu sensor dengan nilai suhu termometer digital pada waktu dan posisi yang sama.
BAB V KALIBRASI DAN PENGUJIAN SISTEM 74
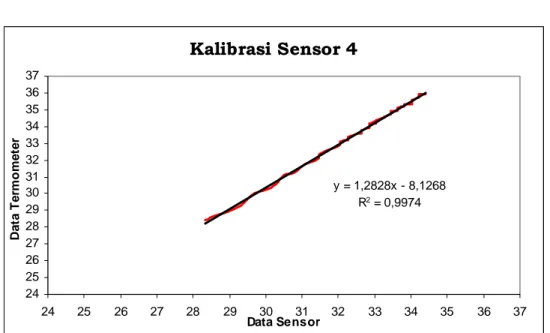
Kalibrasi dilakukan pada delapan sensor yang digunakan. Untuk sensor 4 dan 5 hasil kalibrasi diperoleh grafik dibawah ini:
Kalibrasi Sensor 4 y = 1,2828x - 8,1268 R2 = 0,9974 24 25 26 27 28 29 30 31 32 33 34 35 36 37 24 25 26 27 28 29 30 31 32 33 34 35 36 37 Data Sensor D a ta T e rm o m et er
Gambar 5.2 Kalibrasi sensor4 LM35
Kalibrasi Sensor 5 y = 1,3731x - 11,332 R2 = 0,9963 24 25 26 27 28 29 30 31 32 33 34 35 36 37 24 25 26 27 28 29 30 31 32 33 34 35 36 37 Data Sensor D a ta T e rm o m et er
BAB V KALIBRASI DAN PENGUJIAN SISTEM 75
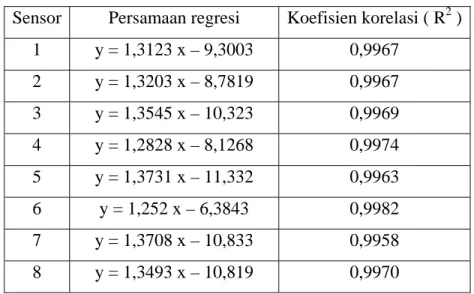
Berikut adalah tabel persamaan regresi dan koefisien korelasi untuk delapan sensor:
Sensor Persamaan regresi Koefisien korelasi ( R2 ) 1 y = 1,3123 x – 9,3003 0,9967 2 y = 1,3203 x – 8,7819 0,9967 3 y = 1,3545 x – 10,323 0,9969 4 y = 1,2828 x – 8,1268 0,9974 5 y = 1,3731 x – 11,332 0,9963 6 y = 1,252 x – 6,3843 0,9982 7 y = 1,3708 x – 10,833 0,9958 8 y = 1,3493 x – 10,819 0,9970
Tabel 5.1 Hasil kalibrasi sensor
5.2 Pengujian Sistem
5.2.1 Respon Sistem Loop Terbuka
Percobaan respon sistem loop terbuka dilakukan dengan empat kondisi bukaan valve yaitu :
a. Valve input dibuka sebasar 25 % b. Valve input dibuka sebesar 50 % c. Valve input dibuka sebesar 75 % d. Valve input dibuka sebesar 100 %
BAB V KALIBRASI DAN PENGUJIAN SISTEM 76
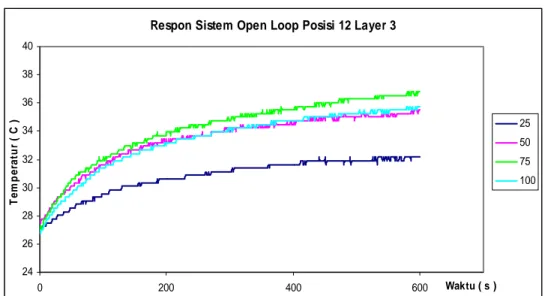
Respon Sistem Open Loop Posisi 12 Layer 3
24 26 28 30 32 34 36 38 40 0 200 400 600 Waktu ( s ) T e m p er at u r ( C ) 25 50 75 100
Gambar 5.4 Respon sistem open loop posisi 12 layer 3
Dari gambar 5.4 terdapat perbedaaan laju kenaikan antara ke empat kondisi bukaan valve tadi untuk tiap detiknya. Terlihat bahwa bukaan valve sebesar 75 % memberikan kenaikan temperatur yang paling tinggi diantara keempat kondisi bukaan valve. Sedangkan kondisi bukaan 25 % memberikan kenaikan temperatur yang paling kecil. Dari hasil percobaan open loop ini, terlihat bahwa plant memenuhi syarat keterkontrolan dengan adanya perbedaaan kenaikan temperatur untuk tiap bukaan.
BAB V KALIBRASI DAN PENGUJIAN SISTEM 77
5.2.2 Respon Sistem Loop Tertutup
a. Set point 32,5 posisi 12 layer 3
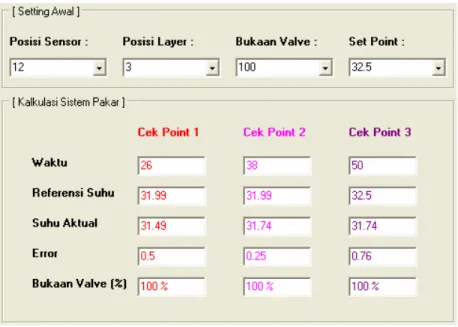
Gambar 5.5 Settingan awal Sp 32.5 Posisi 12 Layer 3
Percobaan respon sistem loop terbuka dimulai dengan menentukan settingan awal. Posisi sensor, posisi layer, bukaan valve awal, dan besarnya set point akan menentukan record yang memberikan waktu dan referensi cek point agar sesuai dengan basis data temperatur yang telah dibangun. Dari gambar 5.5 terlihat bahwa pada cek point 1 error yang terjadi karena perbedaan set point dengan temperatur aktual sebesar 0.5. besarnya error ini mengindikasikan bahwa besarnya supply udara panas yang mengakibatkan kenaikan temperatur aktual pada waktu cek point 1 masih harus ditingkatkan lagi.
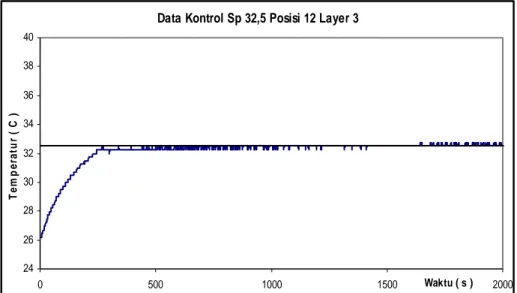
Pengujian untuk kondisi awal diatas dilakukan selama 2000 detik memberikan grafik temperatur aktual terhadap waktu seperti pada gambar 5.6. Dari
BAB V KALIBRASI DAN PENGUJIAN SISTEM 78
kecenderungan grafik temperatur terhadap waktu pada gambar 5.6 terlihat bahwa osilasi terjadi pada waktu setelah set point tercapai namun lama kelamaan respon sistem dapat dikatakan stabil dengan error sistem ini sekitar ±0.26.
% 100 int x po set state steady saat pada error osilasi amplitudo state steady Error = = 100% 5 . 32 5 . 32 75 . 32 x − = 0.77 %
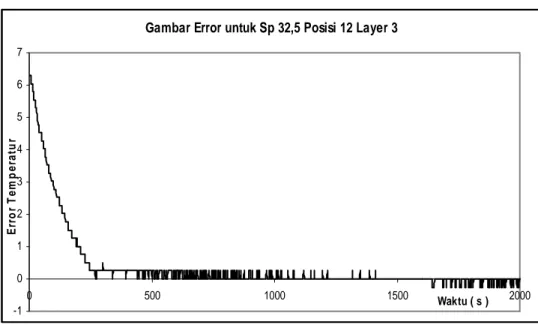
Error steady state sebesar 0.25 atau 0.77 % masih lebih kecil dari persentase error absolut yang diperbolehkan yaitu sebesar 2 % atau 5 %. Hal ini mengindikasikan bahwa sistem dapat dikatakan stabil. Grafik error yang terjadi dapat dilihat pada gambar 5.8. sedangkan tampilan software pada saat settingan tersebut dapat dilihat dari gambar 5.9.
Data Kontrol Sp 32,5 Posisi 12 Layer 3
24 26 28 30 32 34 36 38 40 0 500 1000 1500 Waktu ( s ) 2000 T e m p er at u r ( C )
BAB V KALIBRASI DAN PENGUJIAN SISTEM 79
(a) (b)
(c) (d)
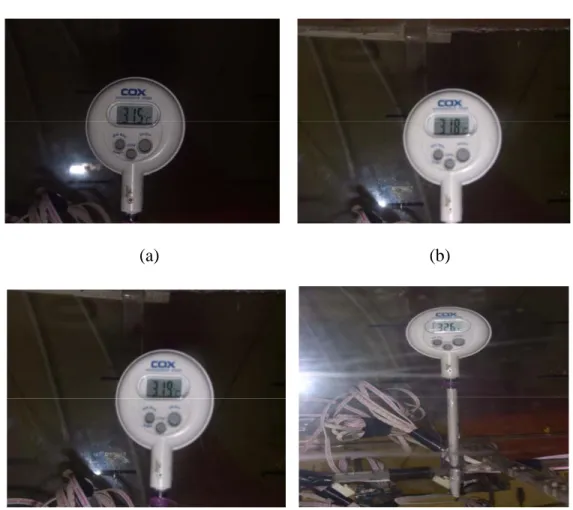
Gambar 5.7 Temperatur pada termometer saat pengujian lup tertutup set point 32,5 posisi 12 layer 3. (a) saat cek point 1 (b) saat cek point 2 (c) saat cek point 3 (d) saat
BAB V KALIBRASI DAN PENGUJIAN SISTEM 80
Gambar Error untuk Sp 32,5 Posisi 12 Layer 3
-1 0 1 2 3 4 5 6 7 0 500 1000 1500 Waktu ( s ) 2000 E rr o r T e m p er at u r
Gambar 5.8 Grafik error yang terjadi untuk sp 32.5 posisi 12 layer 3
BAB V KALIBRASI DAN PENGUJIAN SISTEM 81
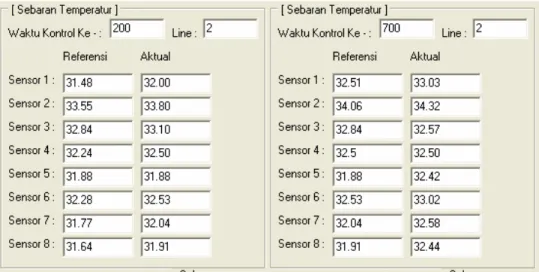
Pada sistem yang dibangun ini dilengkapi dengan fasilitas untuk mengetahui sebaran temperatur yang terjadi pada tiap posisi yang ada pada line yang sama. Fasilitas ini akan membandingkan sebaran temperatur yang telah direkam dalam basis data pengetahuan dengan temperatur aktual pengontrolan. User dapat melihat apakah sebaran temperatur refensi sesuai dengan temperatur aktual. Dari gambar 5.10 terlihat untuk beberapa posisi sensor temperatur aktual tidak sesuai dengan referensi yang telah ada. Hal ini dapat dimengerti karena bentuk aliran udara panas yang disemburkan sumber panas dapat tidak sama pada setiap kondisi kontrol. Hal ini dikarenakan aliran yang terjadi tidak hanya aliran laminar tetapi juga terdapat aliran turbulen yang tidak dapat diprediksi arah alirannya. Namun, dalam sistem ini dilengkapi juga fasilitas untuk mengubah besarnya nilai sebaran referensi yang ada pada basis data sebaran temperatur yang ada.
BAB V KALIBRASI DAN PENGUJIAN SISTEM 82
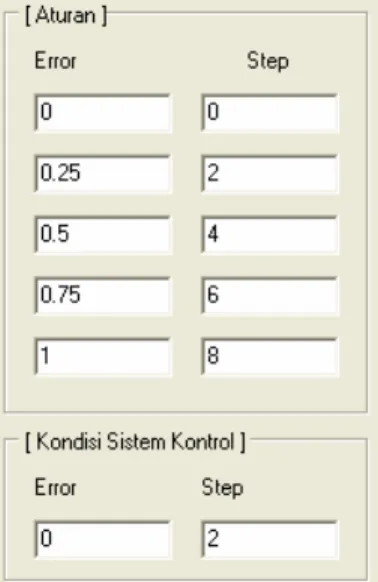
Gambar 5.11 Aturan yang dipakai
b. Set point 34,26 posisi 12 layer 3
Percobaan sistem loop tertutup yang kedua dilakukan pada kondidi awal yang sama namun dengan set point yang berbeda yaitu sebesar 34.26. Gambar 5.12 memperlihatkan pada saat cek point 1 nilai temperatur aktual melebihi nilai temperatur referensi yang diberikan. Hal ini mengakibatkan aksi pengontrolan terhadap valve agar mengurangi bukaannya sebesar 25 %. Kondisi serupa terjadi pada saat cek point 2 sehingga hasilnya pada set point 3 nilai temperatur aktual dapat sesuai dengan yang direferensikan.
BAB V KALIBRASI DAN PENGUJIAN SISTEM 83
Gambar 5.12 Settingan awal Sp 34.26 posisi 12 layer 3
Dari grafik temperatur terhadap waktu pada gambar 5.13 terlihat bahwa over shoot terjadi pada saat waktu 185 s sebesar 34.51. Osilasi terjadi pada waktu setelah set point tercapai namun lama kelamaan respon sistem dapat dikatakan stabil dengan error sistem ini sekitar ±0.26.
Maksimum persen overshoot untuk sistem ini sebesar:
% 100 ) ( ) ( ) ( x c c t c overshoot percent Maximum p ∞ ∞ − = = 100% 26 . 34 26 . 34 51 . 34 x − = 0.73 %
BAB V KALIBRASI DAN PENGUJIAN SISTEM 84 % 100 int x po set state steady saat pada error osilasi amplitudo state steady Error = = 100% 26 . 34 34 26 . 34 x − = 0.73 %
Error steady state sebesar 0.25 atau 0.73 % masih lebih kecil dari persentase error absolut yang diperbolehkan yaitu sebesar 2 % atau 5 %. Hal ini mengindikasikan bahwa sistem dapat dikatakan stabil. Grafik error yang terjadi dapat dilihat pada gambar 5.14 sedangkan tampilan pada software dapat dilihat pada gambar 5.15.
Data Kontrol Sp 34.26 Posisi 12 Layer 3
24 26 28 30 32 34 36 38 40 0 500 1000 1500 Waktu ( s ) 2000 T e m p er at u r ( C )
BAB V KALIBRASI DAN PENGUJIAN SISTEM 85
Gambar Error Untuk Sp 34.26 Posisi 12 Layer 3
-1 0 1 2 3 4 5 6 7 0 500 1000 1500 Waktu ( s ) 2000 Erro r T e m p e ra tu r
Gambar 5.14 Grafik error yang terjadi untuk sp 32.5 posisi 12 layer 3
BAB V KALIBRASI DAN PENGUJIAN SISTEM 86
5.2.3 Respon Sistem Jika Aturan Tidak Tepat
Ketepatan memilih aturan sangat penting dalam sistem kontrol yang dikembangkan ini. Hal ini terlihat pada percobaan yang dilakukan. Aturan diberikan pada sistem sesuai dengan gambar 5.16. Aturan ini diterapkan untuk kondisi setting awal yang sama seperti pada gambar 5.5.
Gambar 5.16 Aturan yang dipakai
Respon kontrol yang dihasilkan dengan kondisi aturan seperti gambar 5.16 dapat dilihat pada gambar 5.17. Grafik temperatur terhadap waktu mengindikasikan bahwa respon sistem akan berosilasi sebesar 32.5 ± 0.26. Osilasi ini terjadi selama proses pengontrolan terjadi. Bila dibandingkan dengan kondisi yang sama namun dengan aturan yang tepat. Kondisi ini jelaslah tidak diinginkan karena kestabilan sistemnya dapat dikatakan kurang bagus karena adanya osilasi. Grafik error terhadap waktu dapat dilihat pada gambar 5.18.
BAB V KALIBRASI DAN PENGUJIAN SISTEM 87
Data Kontrol Sp 32.5 Posisi 12 Layer 3
24 26 28 30 32 34 36 38 40 0 500 1000 1500 Waktu ( s ) 2000 T e m p er at u r ( C )
Gambar 5.17 Grafik data kontrol untuk sp 32.5 posisi 12 layer 3 aturan tidak tepat
Gambar Error Untuk Sp 32.5 Posisi 12 Layer 3
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 0 500 1000 1500 2000 Waktu ( s ) E rro r T e m p e ra tu r
Gambar 5.18 Grafik error yang terjadi untuk sp 32.5 posisi 12 layer 3 aturan tidak tepat
BAB V KALIBRASI DAN PENGUJIAN SISTEM 88
5.2.4 Respon Sistem Kontrol On-Off
Untuk membandingkan dengan sistem kontrol konvensional, respon sistem akan dicoba dengan menggunakan teknik kontrol on-off dengan set point 34.26. dari gambar 5.19 sistem dengan jenis kontrol ini mengalami osilasi setiap saat dan akan berosilasi antara 34.26 ± 0.26. gambar tampilan pada software dapat dilihat di gambar 5.20. sedangkan grafik error terhadap waktu yang terjadi dapat dilihat pada gambar 5.21.
Grafik Kontol On Off untuk Sp 34.26 Posisi 12 Layer 3
24 26 28 30 32 34 36 38 40 0 400 800 Waktu ( s ) 1200 Te mp e ra tu r ( C )
BAB V KALIBRASI DAN PENGUJIAN SISTEM 89
Gambar 5.20 Tampilan di software
Grafik Error Kontrol On Off Sp 34.26 Posisi 12 Layer 3
-1 0 1 2 3 4 5 6 7 0 400 800 Waktu ( s ) 1200 Erro r T e m p e ra tu r