KLASIFIKASI JENIS KENDARAAN DENGAN GABOR
FILTERING DAN NAÏVE BAYES
Muhammad Enzi Muzakki
1, Mohamad Syahrul Mubarok
2, Prof. Dr. Adiwijaya
3 123Prodi S1 Teknik Informatika, Fakultas Informatika, Universitas Telkom
Jl. Telekomunikasi No. 1 Ters. Buah Batu Bandung 40257 Indonesia
1
[email protected],
2[email protected],
3[email protected]
Abstrak—Di Indonesia sekarang ini, sistem pengamatan lalu lintas masih menggunakan kemampuan
pengawasan manusia. Contohnya pada saat pembayaran karcis parkir, tiket di gerbang tol dsb. Memang manusia dapat membedakan objek satu dengan yang lainnya dengan mudah akan tetapi tetap saja manusia memiliki keterbatasan seperti kelelahan dan kurangnya konsentrasi. Untuk mempermudah hal tersebut diperlukan sistem yang dapat mengelompokkan kendaraan-kendaraan tersebut secara otomatis. Dalam makalah ini kendaraan beroda empat atau lebih akan dikelompokkan ke dalam tiga kelompok yaitu, bus, truck
dan car.
Metode ekstraksi ciri yang digunakkan adalah Gabor Filter yang menggunakan frekuensi dan
orientasi sebagai parameter untuk menghasilkan ciri penting dari citra masukan serta hasil dari ekstraksi tersebut menjadi nilai masukan pada proses klasifikasi Naïve Bayes. Klasifikasi kendaran didapat setelah
melalui berbagai tahap preprocessing hingga menghasilkan kategori dari kendaraan tersebut. Setelah itu
dilakukan pencarian nilai parameter Gabor Filter yang terbaik hingga mendapatkan nilai yang maksimal.
Hasil pengujian pun akhirnya dapat mencapai nilai akurasi 81.73%.
Kata kunci : Gabor Filter, Naïve Bayes, klasifikasi kendaran.
Abstract—Currently in Indonesia, system surveillance traffic still using capability of human supervision. Example in payment parking ticket and ticket in toll gates etc. Surely human can easily distinguish object one to another object but nonetheless human has its limitation as fatigue and lack of concentration. To simplify that matter be required a system that can grouping vehicles automatically. In this paper 4 wheel transportation or more will be divide into 3 groups such as, Bus, Car and Truck.
Method feature extraction will be using Gabor Filter which use frequency and orientation as parameter to
generate important characteristic from image and the result of the process will be value input for classification Naïve
Bayes. Classification be obtained from various stage of preprocessing until become result of category vehicle. After
that do a lookup for Gabor Filter parameter value in order to give better result with maximum value. Thus experiment
shows an acceptable accuracy for about 81.73%.
Keyword : Gabor Filter, Naïve Bayes, classification vehicle.
I. PENDAHULUAN
Di Indonesia sekarang ini, sistem pengamatan lalu lintas masih menggunakan kemampuan pengawasan manusia. Manusia memang dapat membedakan objek satu dengan objek lainnya dengan mudah, tetapi bagaimanapun juga manusia memiliki keterbatasan seperti kelelahan atau kurangnya konsentrasi. Meskipun demikian, manusia dianggap
sebagai classifier terbaik di dunia. Contohnya, Taigman Y [2] menggunakan manusia sebagai parameter sukses dalam
Salah satu solusi untuk permasalahan diatas adalah melakukan klasifikasi terhadap tipe kendaraan yang berlalu lintas di jalan tol, sehingga tidak perlu menggunakan pembatas/palang untuk melakukan transaksi di gerbang tol dan lebih efisien dalam segi waktu. Salah satu teknik ekstraksi ciri dalam pengenalan bentuk adalah menggunakan metode
Gabor Filter. Gabor Filter merupakan teknik ekstraksi ciri yang mengambil representasi yang optimal dari arah
orientasi dan frekuensi spasial. Beberapa penelitian menyatakan Gabor Filter sangat mirip dengan sistem visual
manusia karena filter ini mampu mendekati beberapa karakteristik sel-sel tertentu di korteks visual beberapa mamalia.
C.Sujatha dan Dr. D. Selvathi [18] dalam penelitiannya menyatakan bahwa Gabor Filter merupakan filter yang
mampu mendapatkan performansi yang baik dalam deteksi tepi. Untuk pencocokan data digunakan teknik Naïve
Bayes sebagai classifier karena merupakan salah satu metode klasifikasi dan termasuk keluarga besar dari probabilistik model dimana sebuah metode untuk menangani permasalahan tentang penalaran ketidakpastian. Data yang diambil
berupa video tampak atas kendaraan di jalan tol. Data tersebut dilakukan proses preprocessing terlebih dahulu,
sebelum melalui tahap-tahap ekstraksi ciri. Setelah melalui kedua proses tersebut setiap input yang masuk akan diklasifikasikan berdasarkan kelasnya yaitu kendaraan berat, kendaraan sedang, kendaraan kecil. Dengan adanya pengklasifikasian jenis kendaraan secara otomatis diharapkan dapat membantu sistem pengawasan lalu lintas dan menjadi lebih efisien dalam pengenalan kendaraan
II. PENELITIAN TERKAIT
Klasifikasi kendaraan adalah salah satu masalah yang menantang pada bidang sistem pengawasan lalu lintas. Sudah banyak penelitian yang mengambil teknik klasifikasi salah satunya Kanwal Yousaf [3] yang melakukan klasifikasi terhadap kendaraan pada penelitiannya dilakukan komparisasi terhadap metode metode yang sering digunakan dalam klasifikasi kendaraan. Setelah melakukan komparisasi terhadap parameter-parameter tersebut ,
mereka menyimpulkan bahwa Hybrid Dynamic Bayesian Network (HDBN) classifier merupakan algoritma yang lebih
baik dari classifier lainnya . HBDB mendeteksi tahap penting dari fitur ekstraksi, seleksi dan klasifikasi dengan
mengambil informasi penting dari tampilan belakang sebuah kendaran ketimbang informansi seperti jarak antar roda dan tinggi roda dll.
Nurhadiyatna [1] mengembangkan real time sistem proses klasifikasi dengan tiga tahapan: deteksi kendaraan
dengan menggunakan Gaussian Mixture Model dengan Hole Filling Algorithma; Gabor Kernel untuk Feature
Extraction; dan lima classifier digunakan. Akurasi tertinggi didapat sebesar 93.36% dengan menggunakan 18 fitur
dari kombinasi parameter gabor kernel dan menggunakan Random Forest sebagai classifier.
III. PERANCANGAN SISTEM
A. Gambaran Umum Sistem
Sistem ini dibangun untuk mengklarifikasi kendaraan memanfaatkan citra yang diambil dari media video yang diperoleh dari kamera pemantau/CCTV yang dipasang di sisi jalan. Dengan citra sebagai inputan, sistem ini dapat mendeteksi objek-objek yang ada terutama difokuskan pada objek kendaraan. Sistem ini melakukan klasifikasi jenis
pada kendaraan yang ada dengan membaginya ke dalam 3 bagian yaitu car,bus dan truck. Agar dapat
mengklasifikasikan jenis kendaraan, sistem harus melakukan dua buah skema utama yang harus dilalui yaitu training
dan testing. Training adalah proses yang bertujuan untuk melabelkan data ciri kendaraan masing-masing jenis ke
dalam database. Testing adalah proses yang bartujuan untuk mengklasifikasikan kendaraan berdasarkan data training
yang telah disimpan dalam database. Tahapan-tahapan perancangan sistem dapat dilihat pada Gambar 8 dan Gambar
Klasifikasi
Berikut ini merupakan deskripsi dari masing-masing proses pada perancangan sistem yang digunakan:
1. Prepocessing
a. Gaussian Mixture Model (GMM)
Dalam proses ini, sistem akan melakukan fase learning dengan mengambil frame-frame dari video input.
Untuk setiap frame, informasi warna dari tiap pixel akan digunakan untuk membangun model GMM. Dari frame pertama untuk setiap pixelnya telah mendapatkan model GMM, kemudian model GMM itu dilakukan pencocokan pada model GMM selanjutnya. Jika tidak cocok maka, dibuat model GMM baru untuk
menggantikan model GMM yang “close enough”terhadap background atau dengan kata lain adalah inputan
tersebut dianggap foreground. Jika cocok, maka dilakukan update terhadap parameter model GMM. Misalnya
parameter weight. Untuk menghindari berlebihnya nilai parameter weight, maka dilakukan normalisasi nilai
weight sehingga tidak lebih dari 1. Tahap terakhir yakni dilakukan pemilihan model GMM yang telah dianggap
sebagai background.
Keluaran dari tahapan ini adalah frame yang terdiri dari model background dan model foreground.
Gambar 3.3. Hasil GMM warna hitam untuk background dan warna putih untuk foreground
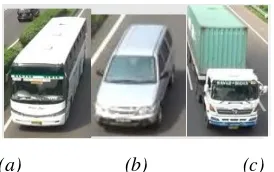
b. Memilah citra secara manual
Hal ini dilakukan karena pada hasil GMM ada beberapa citra yang sama dan citra yang terdeteksi bukan merupakan kendaraan penulis sebut sebagai citra noise. Kemudian pada data latih sendiri saya melakukan
pembagian berdasarkan bus, car dan truck untuk menghitung berapa banyak data bus, car dan truck yang
terdeteksi kemudian dilakukan labeling. Noise tidak penulis masukan kedalam data latih. Hasil dari cropping
deteksi GMM berbeda ukuran.
(a) (b) (c)
--2. Feature Extraction
a. Gabor Filter
Proses ekstraksi fitur dilakukan menggunakan Gabor Filter. Hasil dari ekstraksi ciri terhadap citra masukan
adalah sebuah vektor ciri. vektor ciri yang didapat sangat mempengaruhi proses klasifikasi dan performasi sistem.
Hasil dari ekstraksi ciri Gabor Filter sangat dipengaruhi oleh kombinasi parameter dari orientasi, ukuran kernel,
dan frekuensi. Panjang vektor ciri yang dihasilkan didapat berdasarkan perkalian dari orientasi dengan frekuensi. Setiap kombinasi frekuensi dan orientasi yang dipakai akan menghasilkan sebuah ciri penting untuk proses selanjutnya. Ukuran kernel akan memperngaruhi komputasi kecepatan pada saat ekstraksi ciri
SU,rt
Initial komel size,
frwquency and
Input Vehlcle Image
Finish
GaborKemel
(a) (b)
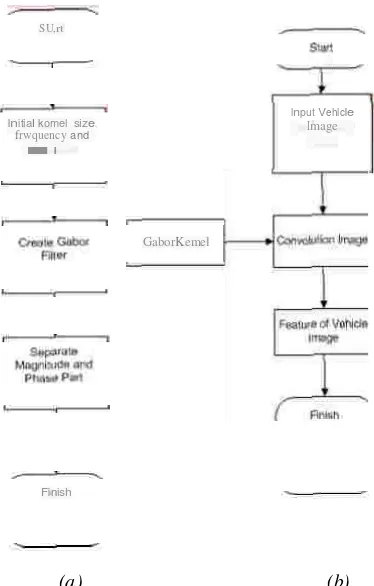
Gambar 3.5. (a) Alur proses pembuatan gabor filter (b) Alur proses konvolusi dengan citra masukan.
Langkah – langkah ekstraksi ciri Gabor Filter adalah sebagai berikut:
1. Pembuatan Gabor Filter
Vektor ciri yang dihasilkan oleh gabor filter merupakan pasangan kombinasi dari frekuensi dan orientasi.
Tahap ini yaitu menentukan nilai parameter yang dibutuhkan untuk pembuatan Gabor Filter. Pada makalah ini,
pengujian dilakukan dengan menggunakan parameter frekuensi 2, 3 dan 4, dengan nilai sudut orientasi 30o, 45o
dan 90o dengan besar kernel konvolusi 17x17, 21x21 dan 23x23 [32]. Hasil dari ektraksi ciri Gabor Filter
memisahkan bagian magnitude dan phase. Keduanya memiliki signal data tetapi yang paling sering digunakan
adalah nilai magnitude karena jika magnitude rendah maka phasenya akan sangat bernoise, sehingga perlu diliat
nilai magnitudenya terlebih dahulu sebelum menggunakan phase.
2. Konvolusi gabor
Untuk setiap pasangan frekuensi dan sudut orientasi akan dibangun filter dari nilai real dan imajiner. Ukuran
matriks filter sesuai dengan ukuran kernel yang telah ditentukan. Kemudian dilakukan konvolusi dengan citra
masukan. Sehingga satu citra menghasilkan nilai magnitude dari masing – masing filter tersebut. Nilai magnitude
didapat dari hasil akar kuadrat dari filter imaginer dan filter real (3.1).
�𝑎𝑔������ = √������2 + ��𝑎������2 (3.1)
��=1 b. Shanon Entropy
Proses entropy pada gambar dilakukan untuk mengetahui distribusi randomness. Entropy dihitung dari semua
gambar yang terintepolasi. Nilai magnitude yang sudah dicari kemudian dilakukan perhitungan menggunakan shanon
entropy. Sebagai contoh jika sebuah gambar mempunyai nilai yang homogen, maka entropy akan nol, sedangkan nilai yang tinggi menunjukkan distribusi heterogen. Entropi dari sebuah gambar dapat dikalkulasi menggunakan dengan formula (3.2):
𝐻 = − ∑𝐿 ��𝑖 log𝑏(��𝑖) (3.2)
Dimana L adalah level keabuan dari sebuah gambar, dan p adalah distribusi probabilistik dari piksel-piksel gambar, nilai b adalah sebuah unit dari entropy untuk shanon b = 2 [26].
3. Vehicle Classification (Naïve Bayes)
Proses Klasifikasi dilakukan dengan menggunakan data yang diperoleh dari data latih sebagai data model. Proses
klasifikasi diawali dengan melakukan proses leaning pada data latih yang sudah dipersiapkan. Output dari proses
tersebut akan dijadikan parameter acuan proses uji selanjutnya. Data latih yang telah melalui proses ekstraksi fitur
selanjutnya dihitung nilai prior probability P(a), mean dan varian untuk setiap kelasnya. Parameter tersebut akan
dijadikan parameter acuan yang digunakan pada classifier model. Prior probability P(a) ditunjukkan dengan
persamaan (3.3).
��(��) = ��𝑎
𝑁 (3.3)
Na nilai banyaknya data pada kelas a. N nilai banyaknya data latih yang digunakan. Mean dan Varians merupakan
output learning pada data latih dari setiap kelas. Perhitungan mean sebagai berikut (3.4).
𝜇 = 1 ∑𝑛 𝑋 (3.4)
𝑛 ��=1 𝑖
Perhitungan varians sebagai berikut (3.5).
𝑛 2
𝜎2 = ∑𝑖 =1 (𝑋𝑖 − 𝜇 )
��−1 (3.5)
Likelihood probability, P(b|a) merupakan kondisi jumlah kemungkinan nilai parameter P(b) yang ada dikelas a.
Perhitungan likelihood menggunakan distribusi normal yang sudah dijelaskan pada bab sebelumnya.Pada penelitian
ini menggunakan proses klasifikasi menggunakan tiga kelas yaitu bus, car dan truck, dengan parameter yang sudah
ditentukan. Kelas terbaik dalam naïve bayes classifier adalah kelas yang memiliki probabilitas tertinggi atau maximum
a posterior (MAP).
IV EVALUASI SISTEM
Pengujian Kinerja Sistem
Skenario 1 Pengujian Ukuran Matriks
Berikut skenario yang dilakukan untuk mendapatkan nilai akurasi dari beberapa pasangan kombinasi parameter. Data uji dan data latih yang digunakan sebanyak masing-masing 100 citra untuk jenis kendaraan bus, 200 citra untuk
jenis kendaraan mobil dan truck ( total 500 citra data latih dan 500 citra data uji). Parameter gabor filter yang akan
dipakai adalah frekuensi dengan nilai 2, 3 dan 4, sudut orientasi dengan nilai pi/2, pi/4, dan pi/6 serta matriks konvolusi dengan nilai 17x17, 21x21 dan 23x23 [32].
Ukuran matriks konvolusi yang digunakan ialah 17x17, 21x21 dan 23x23 menurut [16] ciri yang dihasilkan akan semakin baik jika ukuran kernel semakin besar sehingga nilai performasi sistem terpengaruh. Sudut orientasi yang paling menyerupai sudut pandang manusia menurut [16] ialah sudut orientasi dengan nilai pi/4 dan pi/6. Orientasi dengan ukuran yang lebih besar juga dilakukan yaitu sebesar pi/2.
78.9
Gambar 3.6. Hasil pengujian berdasarkan parameter Gabor Filter
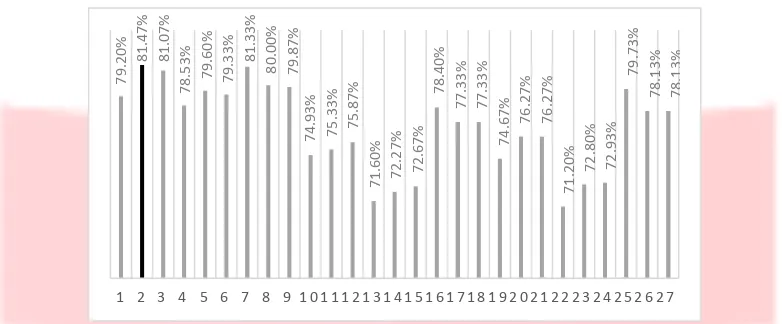
Gambar 3.6. menjelaskan bahwa pada pengujian parameter Gabor Filter akurasi tertinggi dimiliki oleh parameter
frekuensi 2 orientasi 90 dan matrix size 17x17 sedangkan akurasi terendah dimiliki oleh frekuensi 3 orientasi 45 dan matrik size 17x17. Secara rinci pengujian bias dilihat pada Lampiran A1, berikut secara lengkap kombinasi parameter
Gabor Filter yang menghasilkan akurasi optimal adalah:
Frekuensi Orientasi Sudut Scale Matriks Size Akurasi Score F1- second Time/
2 90 (pi/2) 1,2,3,4 17x17 81.73% 72.60% 29.27340
Berdasarkan hasil tersebut, dapat dinyatakan bahwa nilai performasi sistem akan semakin besar apabila nilai frekuensi yang dipakai semakin kecil. Dengan kata lain, nilai hasil filter akan semakin seragam apabila nilai frekuensi yang digunakan semakin kecil sehingga nilai yang dihasilkan oleh ekstraksi ciri ini akan memiliki kemiripan dengan citra masukan.
Terlihat bahwa hasil dari percobaan Gabor Filter menyatakan bahwa ciri yang dihasilkan relative lebih baik
apabila nilai pada sudur orientasi yang digunakan semakin tinggi walaupun menurut [16] sudut orientasi pi/4 dan pi/6 lebih baik. Selain itu performasi sistem akan semakin meningkat apabila penggunakan kombinasi parameter gabor yang tepat. Pada percobaan ini, konvolusi yang memiliki ukuran terkecilah yang menghasilkan akurasi sistem yang baik. Ini dikarenakan ukuran citra yang digunakan tidak begitu besar sehingga dengan menggunakan ukuran kernel yang kecil, citra masukan akan memperlihatkan detail citra yang diberikan. Semakin kecil ukuran kernel semakin detail hasil ektraksi cirinya. Makalah ini menggunakan 500 data uji dan menghasilkan akurasi sebesar 81.73%.
Skenario 2 Pengujian nilai Prior Naïve Bayes
Berikut skenario yang dilakukan untuk mendapatkan nilai akurasi dari nilai prior masukan pada naïve bayes. Sebelumnya kita sudah mendapatkan nilai akurasi maksimal sebesar 81.73% pada orientasi 90 kervel konvolusi 17x17 dan nilai frekuensi 2, nilai prior yang digunakan adalah nilai prior berdasarkan data-data masukan. Berikut nilai prior dari data masukan.
Tabel 1. Nilai prior berdasarkan dataset
Jenis Kendaraan Nilai Prior berdasarkan dataset
Bis 0.200
Mobil 0.400
Truk 0.400
79.2
Gambar 3.6. Hasil Pengujian Berdasarkan Uniform Prior Naïve Bayes
Gambar 3.6 menunjukkan hasil pengujian berdasarkan uniform prior Naïve Bayes akurasi maksimum dimiliki
oleh frekuensi 2 orientasi 30 dan matrik size 23x23 sedangkan akurasi minimum dimiliki oleh frekuensi 4 orientasi 45 dan matrik size 17x17. Berikut secara lengkap nilai parameter yang digunakan sehingga memiliki akurasi tinggi pada uniform prior
Gambar 3.7. Perbandingan nilai maksimum berdasarkan normal prior dengan uniform prior
Terlihat pada Gambar 3.7 bahwa perubahan yang terjadi bila menggunakan prior uniform hasil diatas adalah parameter yang memiliki akurasi yang tidak jauh berbeda dari normal prior. Akan tetapi perbandingan ini tidak membandingkan parameter uji pada normal prior yang sebelumnya memiliki akurasi tinggi tetapi keduanya hanya melihat hasil dari kedua akurasi yang memiliki tingkat akurasi yang paling baik. Penulis menyadari setelah melakukan beberapa kali perubahan jumlah dataset yang akan diuji dan dilatih, uniform prior sangat berpengaruh ketika jumlah data latih yang akan dijadikan data model tidak sama rata atau jumlahnya jauh berbeda satu dengan yang lainnya. Misalkan jumlah bus hanya dua lima dan yang lainnya melebihi seratus. Dengan kata lain hasil pengujian 1 tidak mengalami perubahan yang terlalu jauh dari pengujian 2 yakni dari 81.73% menjadi 81.33% (terlampir pada A1) sedangkan parameter baru ini pada pengujian 1 menggunakan prior dataset memiliki akurasi 80.67%, menjadi 81.43% pada pengujian 2 dengan perubahan yakni sekitar 0.8%. ini membuktikan bahwa prior naïve bayes sangat memperngaruhi nilai akurasi suatu sistem oleh karena itu perlu ditegaskan untuk penggunaan prior naïve baiyes yang uniform atau menggunakan dataset masukan.diawal pemprosesan suatu sistem.
Skenario 3 Pengujian jumlah filter Gabor .
81.7
akan diuji lagi dengan menggunakan beberapa jumlah filter saja, yang sebelumnya menggunakan empat filter dari skala 1,2,3 dan 4. Berikut hasil pengujian dengan menggunakan jumlah filter dengan variasi skala.
1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 1 3 1 4
Gambar 3.8 Hasil pengujian menggunakan jumlah filter dengan variasi skala 1,2,3 dan 4.
Gambar 3.8 menunjukkan hasil dari variasi nilai skala parameter ke-14 memiliki nilai skala = 1 dengan jumlah filter satu kemudian Penulis melakukan penyamarataan dengan jumlah masing-masing filter secara lebih jelasnya bisa dilihat pada Lampiran A3.
81.80%
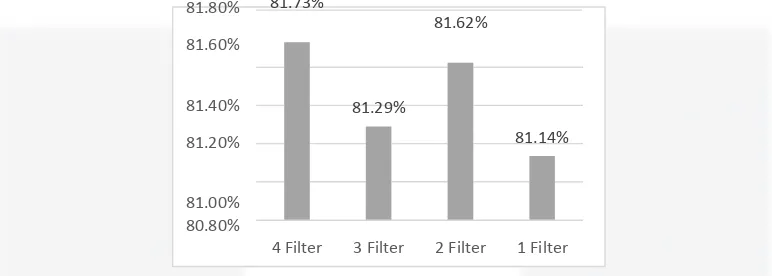
Gambar 3.9 Hasil Penyamarataan jumlah filter pada Gabor dari skala 1,2,3 dan 4
Gambar 3.9 menunjukkan hasil penyamarataan dari tiap-tiap jumlah filter, misalnya jumlah 2 filter yang terdapat pada Lampiran A3 berjumlah enam dengan masing-masing nilai skala 3,4; 2,3 ; 2,4 ; 1,4 ; 1,3 ; 1,2 hasil akurasi yang dihasilkan dengan skala tersebut penulis cari rata-ratanya dengan maksud melihat nilai akurasi dengan menggunakan 2 filter dengan begitu hasil akurasi dari tiap jumlah filter sama. Hasil menunjukkan dengan menggunakan 4 filter akurasi yang dihasilkan maksimum yakni bernilai 81.73%. Ini membuktikan bahwa dengan menggunakan jumlah filter yang maksimum maka akan sangat mempengaruhi nilai akurasi yang didapat.
Kesimpulan
Berdasarkan hasil pengujian dan analisis yang telah dilakukan, maka dapat kesimpulan yang dapat diambil yaitu:
1. Tahapan parameter Gabor Filter yang mempengaruhi pada ekstraksi ciri yaitu nilai pada frekuensi, nilai pada
orientasi dan besar ukuran pada matriks konvolusi. Nilai ekstraksi ciri akan sangat detail apabila nilai frekuensi dan ukuran pada kernel yang digunakan semakin kecil sehingga memiliki kemiripan dengan citra masukan dan semakin baik nilai akurasinya. Dengan kombinasi parameter yang berbeda terbukti dapat memberikan performasi sistem yang berubah sehingga dapat berpengaruh terhadap nilai ektraksi ciri. 2. Penggunaan prior uniform sangat mempengaruhi hasil klasifikasi yang diberikan dan mengubah nilai akurasi
3. Berdasarkan hasil percobaan dengan menggunakan metode Gabor Filter dan Naive Bayes mendapatkan akurasi sebesar 81.73%.
Saran
Adapun saran yang bias dikembangkan berkaitan dengan penelitian ini sebagai berikut.
1. Mengembangkan penelitian sistem klasifikasi kendaraan dengan menggunakan video processing sebagai inputan.
2. Penggunaan kombinasi parameter Gabor Filter yang lebih bervariasi misal menggunakan dua sudut orientasi 30
dan 60.
V. DAFTAR PUSTAKA
[1] A. Nurhadiyatna, A.L. Latifah & D. Fryantoni (2015). Gabor Filtering for Feature Extraction in Real Time Vehicle
Classification Sytem. IEEE 9th International Symposium on Image and Signal Processing and Analysis (ISPA), 2015.
[2] Y. Taigman, M.Yang, M. Ranzato. & L. Wolf, Deep Face: Closing the Gap to Human-Level Perfomance in Face
Verivication. IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2014, pp.1701-1708,2014.
[3] K.Yousaf, A. Iftikhar & A. Javed. (2012). Comparative Analysis of Automatic Vehicle Classification Techniques:
A Survey. I.J. Image, Graphics and Signal Processing (MECS) 2012,9,52-59
[4] Liu, J.G., Mason, P.J. (2009). Essential Image Processing and GIS for Remote Sensing, John Wiley and Sons,
Chichester.
[5] Rinaldi Munir, (2004) Pengolahan Citra Digital dengan Pendekatan Algoritmik. Penerbit Informatika Bandung.
2004
[6] I. T Young, J. J. Gerbrands & L. J. van Vliet. (2007). Fundamental of Image Processing. Image Processing
Fundamental. Delf University of Technology.
[7] E. M. Koeanan. (2009) Perbandingan Beberapa Literatur. FASILKOM Universitas Indonesia. 2009.
[8] Rinaldi Munir, (2007) Pengolahan Citra Digital. Informatika Bandung.
[9] G. Kumar & P. K. Bhatia. (2014). A Detailed Review of Feature Extraction in Image Processing Systems. 4th
International Conference on Advanced Computing & Communication Technologies. 2014.
[10] Konstantinos G. Derpanis. (2007). Gabor Filter. York University. Version 1.3.
[11] Rish. I., (2006). An Empirical Study of The Naïve Bayes Classifier. International Joint Conference on Artificial
Intellegence, California.
[12] Purnamo, Muridhi Hery dan Arif Muntasa. (2010). Konsep Pengolahan Citra Digital dan Ekstraksi Fitur, Graha
Ilmu, Yogyakarta.
[13] Nugroho, Eko. (2008). Pengenalan Teori Warna, Andi Publiser. Semarang.
[14] S. Rostianingsih, R. Adipranata dan W. S. Fredy, (2008) Adaptive Background dengan Metode Gaussian Mixture,
Jurnal Informatika No. 1, vol. 9, p. 10,
[15] Z, Guo, Z Lei dan Z. David, (2008) A Completed Modeling of Local Binary Pattern, IEEE Trans
[16] Jonathan Parousia. Peter. Identifikasi Tanda Tangan menggunakan Metode Filter 2D Gabor Wavelet dan
Algoritma Propagasi Balik Lavenberg Marquardt. 2011. IT Telkom, Bandung.
[17] Pratama, Ivan Nur. Identifikasi Iris Mata Menggunakan Filter 2D Gabor Wavelet dan Jaringan Saraf Tiruan
Learning Vector Quantization (LVQ). IT Telkom, Bandung. 2006.
[18] C.Sujatha dan Dr. D. Selvathi. An Optimal Solution For Image Edge Detection Problem Using Simplefied Gabor
[19] Moeslund, Thomas B. Introduction to Video and Image Processing Building Real Systems and Application. Undergraduated Topic in Computer Science. 2012.
[20] Santoso, Djunaidy. Genbit Yasbil dan Ashadi Salim. Rancangan Program Aplikasi Pengenalan Pola Suara pada
Absensi Karyawan Menggunakan Gaussian Mixture Model dan MABC. FASILKOM. Vol.8 No 1, Januari 2008.
[21] N. Petkov and M.B. Wieling, Gabor Filter for Image Processing and Computer Vision. Departemen of
Computing Science, Intelligent Systems. www.matlabserver.cs.rug.nl. University of Groningen. Juli 2008.
[22] Joshl, Prateek. Understanding Gabor Filter. Computer Vision, Image Processing. www.prakteekvjoshi.com.
April 26, 2014.
[23] R.T. Wahyunigrum dan F. Damayanti, Studi Perbandingan Pengenalan Citra Senyuman Berdasarkan Aesthetic
Dentistry Menggunakan Metode 2d-Pea dan Metode 2s-Lda. Jurnal Ilmial Kursor, Vol. 5, no. 4, pp. 212-222, Juli 2010.
[24] S. Natalius, Metoda Naïve Bayes Classifier dan Penggunaannya pada Klasifikasi Dokumen. Institut Teknologi
Bandung. 2011.
[25] R. R. Gunaria, Analisis dan Implementasi Edge Detection pada Citra Digital Menggunakan Gabor Filters.
Universitas Telkom. Bandung. 2007
[26] Adiwijaya, 2016. Matematika Diskrit dan Aplikasinya. Bandung: Alfabeta.
[27] Adiwijaya, 2004. Aplikasi Matriks & Ruang Vektor. Yogyakarta: Graha Ilmu
[28] Setiawati, E., 2007. Watermarking pada Citra Digital dengan Metode Discrete Wavelet Transform dan Singular Value Decomposition. Departemen Teknik Informatika Institut Teknologi Telkom.
[30] Maharani, M., Dewi, B.K., Yulianto, F.A. and Purnama, B., 2013. digital image compression using graph coloring quantization based on wavelet-SVD. In Journal of Physics: Conference Series (Vol. 423, No. 1, p. 012019). IOP Publishing.
[31] Agustina, R., Adiwijaya, and Ari, M. B., 2010. Pendeteksian dan Perbaikan Citra Termanipulasi yang Disisipi Watermark Menggunakan Block Truncation Coding (BTC) Berbasis Wavelet. Jurnal Telekomunikasi, 15, pp.116-122.
[32] R. Sysi, R. Ade dan Bedy Purnama., 2013. Klasifikasi Jenis Kendaraan Menggunakan Metode Gabor Wavalet
![gambar, nilai b adalah sebuah unit dari entropy untuk shanon b = 2 [26].](https://thumb-ap.123doks.com/thumbv2/123dok/4033645.1977065/5.612.73.499.361.446/gambar-nilai-adalah-sebuah-unit-entropy-untuk-shanon.webp)