TUGAS AKHIR
ANALISIS RESPON KECEPATAN MOTOR DC
TANPA BEBAN DENGAN PULSE WIDTH MODULATION
(PWM) MELALUI PENDEKATAN PEMODELAN DAN
SIMULASI
DISUSUN OLEH :
LUKMAN MULYANTO
E11.2008.00263
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS DIAN NUSWANTORO
2014
ii
HALAMAN PENGESAHAN
ANALISIS RESPON KECEPATAN MOTOR DC
TANPA BEBAN DENGAN PULSE WIDTH MODULATION (PWM) MELALUI PENDEKATAN PEMODELAN DAN SIMULASI
Yang dipersiapkan dan disusun oleh LUKMAN MULYANTO
E11.2008.00263
Telah dipertahankan di depan Dewan Penguji Padatanggal : 03Oktober 2014Februari 2009 Dan dinyatakan telah memenuhi syarat
Susunan Tim Penguji Pembimbing I
Dr.Ir. Dian Retno Sawitri, MT NPP : 0686.11.1993.034
Ketua Penguji
Dr. I Ketut Swakarma, MT NPP: 0686.11.2011.429 Pembimbing II
M. Ary Heryanto, S.T, M.Eng NPP : 0686.11.2002.309
Anggota Penguji I
Herwin Suprijono, ST, MT NPP : 0686.11.2006.332
Anggota Penguji II
Ir. Wisnu Adi. P. M. Eng NPP : 0686.11.2000.201 Semarang, 03 Oktober 20146 Februari 2009
Fakultas Teknik Universitas Dian Nuswantoro
Dekan
Dr. Eng. Yuliman Purwanto, M.Eng NPP :0686.11.2001.266
iii
LEMBAR PERNYATAAN KEASLIAN SKRIPSI
Saya yang bertanda tangan dibawah ini :
Nama : Lukman Mulyanto
NIM : E11.2008.00263
Juruan : Teknik Elektro S1
Judul Skripsi : Analisis Respon Kecepatan Motor DC Tanpa Beban Dengan Pulse Width Modulation (PWM) Melalui Pendekatan Pemodelan Dan Simulasi
Menyatakan dengan sebenarnya bahwa penulisan Skripsi berdasarkan hasilpenelitian, pemikiran dan pemaparan asli dari penulis sendiri, baik untuk naskahlaporan maupun kegiatan yang tercantum sebagai bagian dari Skripsi ini. Jikaterdapat karya orang lain, penulis akan mencantumkan sumber secara jelas.
Demikian pernyataan ini saya buat dengan sesungguhnya dan apabiladikemudian hari terdapat penyimpangan dan ketidakbenaran dalam pernyataan ini, maka saya bersedia menerima sanksi lain sesuai dengan norma yang berlaku diperguruan tinggi ini.Demikian pernyataan ini saya buat dalam keadaan sadar tanpa paksaan dari pihak manapun.
Semarang, 25 Juli 2014 Yang membuat pernyataan,
iv INTISARI
Motor DC adalah motor yang digerakkan dengan arus searah (DC). Dalam pengaturan arah putaran menggunakan pengendali (controller).Dalam penelitian ini diuraikan bagaimana mengendalikan motor dengan PWM (Pulse Width Modulation), yang mana dilakukan dengan pendekatan pemodelan dan simulasi. Adapun PWM dalam penelitian ini dibangun dengan membuat sebuah blok model baru PWM pada simulink Matlab. Pada penelitian ini difokuskan pada pengaturan duty cycle, untuk melihat reaksi yang terjadi pada motor, dalam hal ini adalah sudut () dan kecepatan Sudut (). Hasilnya adalah semakin besar duty cycle, maka kestabilan sudut yang dibentuk semakin baik. Kata kunci : duty cycle, PWM, sudut dan kecepatan sudut
v
ABSTRACT
Motor DC is the motor driven to direct current (DC). In direction of rotation setting, controller is used. The study outlines how to control motor using PWM (Pulse Width Modulation), which is carried out by modeling and simulation approach. While PWM in the study is built by creating a block of new model of PWM on Matlab Simulink. The study focuses on the duty cycle setting, to
observe the reaction taking place on the motor, in this case is speed () and
angular speed (). By duty cycle at 10%, 25%, 75 % and 100 %, the outer
response of the speed signal and the angular speed equal to the time. The result is that the greater duty cycle, the better response built.
vi
KATA PENGANTAR
Puji syukur alhamdulillah penulis panjatkan kehadirat Allah SWT atas berkat, rahmat, taufik dan hidayah-Nya, penyusunan skripsi yang berjudul “Analisis Respon Kecepatan Motor DC Tanpa Beban Dengan Pulse Width Modulation (PWM) Melalui Pendekatan Pemodelan Dan Simulasi” dapat diselesaikan dengan baik.
Penulis menyadari bahwa dalam proses penulisan skripsi ini banyak mengalami kendala, namun berkat bantuan, bimbingan, kerjasama dari berbagai pihak dan berkah dari Allah SWT sehingga kendala-kendala yang dihadapi tersebut dapat diatasi. Untuk itu penulis menyampaikan ucapan terima kasih dan penghargaan kepada Ibu Dr. Ir. Dian Retno Sawitri, MT selaku pembimbing I dan Bapak M. Ary Heryanto, ST, M.Eng selaku pembimbing II yang telah dengan sabar, tekun, tulus dan ikhlas meluangkan waktu, tenaga dan pikiran memberikan bimbingan, motivasi, arahan, dan saran-saran yang sangat berharga kepada penulis selama menyusun skripsi.
Selanjutnya ucapan terima kasih penulis sampaikan pula kepada:
1. Dr. Ir. Edi Noersasongko, M.Kom, selaku Rektor Universitas Dian Nuswantoro Semarang
2. Bapak Dr. Eng. Yuliman, Dekan Fakultas Teknik Universitas Dian Nuswantoro Semarang
vii
3. Ibu Dr. Ir Dian RetnoSawitri, MT,selaku Ketua Program Studi Teknik Elektro S1 Universtas Dian Nuswantoro merangkap dosen pembimbing yang telah memberikan dorongan dan semangat untuk segera menyelesaikan penyusunan skripsi ini.
4. Bapak dan Ibu Dosen serta Staf di Fakultas Teknik yang telah memberi bekal ilmu pengetahuan sehingga penulis dapat menyelesaikan studi dan menyelesaikan penulisan skripsi ini.
5. Warga Pengajian Majlis Tafsir Alquran di Perwakilan Kota Semarang dan Cabang Tembalang, khususnya Ustadz Agung Susila dan Ustadz Sukamta, MT yang membantu secara moril dan spiritual kepada saya
6. Ibunda Tercinta (Allahumaghfirlaha), Pakde Agus (Allahumaghfirlahu), Paman Sukatno (Allahumaghfirlahu), dan Anakku, yang mana mereka semua telah menghadap Allah SWT
7. Isteriku tercantik dan tercinta yang telah menemani dalam suka dan duka. 8. Serta semua pihak yang tidak dapat penulis sebut satu persatu yang telah
membantu dalam penyelesaian penulisan skripsi ini.
Akhirnya, dengan segala kerendahan hati penulis menyadari masih banyak terdapat kekurangan-kekurangan, sehingga penulis mengharapkan adanya saran dan kritikyang bersifat membangun demi kesempurnaan skripsi ini.
Semarang, 25 Juli 2014 Penulis
viii
MOTO DAN PERSEMBAHAN
Moto :
1. Allah tempat Kembali semua urusan
2. Menuntut Ilmu hukumnya Wajib ‘Ain dan Ilmu adalah investasi yang sangat berharga untuk dunia dan akhirat
Persembahan :
ix
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PENGESAHAN...ii
SURAT KETERANGAN KEASLIAN SKRIPSI... iii
INTISARI ... iv
ABSTRACT ...v
KATA PENGANTAR ... vi
MOTO DAN PERSEMBAHAN ... viii
DAFTAR ISI ... ix
DAFTAR GAMBAR ... xi
DAFTAR TABEL ... xiii
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah ...1
1.2 Permasalahan ...5
1.3 Perumusan Masalah ...5
1.4 Pembatasan Masalah ...5
1.5 Manfaat Penelitian ...6
x BAB II LANDASAN TEORI
2.1 Pengertian Motor DC ...7
2.2 Prinsip Dasar Cara Kerja ...8
2.3 Metode PWM ...13
BAB III METODOLOGI PENELITIAN 3.1 Metode Pengambilan Data...17
3.2 Perancangan Blok Diagram Simulink ...20
3.3 Obyek Penelitian ...28
3.4 Diagram Proses Pembuatan Skripsi ...29
BAB IV HASIL DAN PEMBAHASAN 4.1 Hasil dan Analisa Percobaan Pertama ...30
4.2 Hasil dan Analisa Percobaan Kedua ...34
4.3 Hasil dan Analisa Percobaan Ketiga ...38
4.4 Hasil dan Analisa Percobaan Keempat ...42
BAB IV 5.1 Kesimpulan ...46
5.2 Saran ...47
xi
DAFTAR GAMBAR
Gambar 1.1 Konsep Pemodelan ...2
Gambar 1.2 Sistem dan Pemodelan ...3
Gambar 2.1 Motor D.C Sederhana ...8
Gambar 2.2 Medan Magnet Yang Membawa Arus Mengelilingi Konduktor ...8
Gambar 2.3 Medan Magnet Yang Dibentuk Arah Konduktor ...9
Gambar 2.4 Medan Magnet Mengelilingi Konduktor dan Diantara Kutub ...10
Gambar 2.5 Reaksi Garis Fluks ...10
Gambar 2.6 Prinsip Kerja Motor DC ...12
Gambar 2.7 Bentuk Gelombang Kotak (pulsa) dengan kondisi high 5V dan Low 0V ...14
Gambar 2.1 Sinyal Referensi ( sinyal tegangan DC)...16
Gambar 3.1 Model Analog Motor DC ...17
Gambar 3.2 Sistem Blok Model Motor DC ...19
Gambar 3.3 Blok Simulink PWM ...20
Gambar 3.4Blok Simulink Yang Dibuat Sub System...20
Gambar 3.5 Simulink Library Browser dan Model Editor ...21
Gambar 3.6 Blok SUM dan Perubahan tanda (List of sign) ...22 Gambar 3.7 Mengubah Nilai Parameter Transfer Fcn menjadi
xii
Gambar 3.8 Mengubah Nilai Parameter Transfer Fcn menjadi VariabelNumerator Coefficient diisi 1 dan
Denumerator Coefficient diisi [J b] ...24
Gambar 3.9Menambahkan Blok Integrator ...24
Gambar 3.10Pada Gambar 3.9 Disambungkan Dengan Blok Gain ...24
Gambar 3.11 Memasukkan Gain dan mengubah parameter menjadi b ...25
Gambar 3.12 Model Blok Motor DC dengan pendekatan Fungsi Transfer ... 25
Gambar 3.13 Subsytem Model Blok Motor DC ...26
Gambar 3.14Subsytem Model Blok Motor DC dengan Parameter untuk mengukur/pengamatan ...26
Gambar 3.15 Perubahan Format Penyimpanan Data ke Workspace ...27
Gambar 3.16 Blok Simulink Lengkap Motor DC dengan PWM ...27
Gambar 3.17 Diagram Proses Pembuatan Skripsi...29
Gambar 4.1 Perintah di Script Editor Matlab Pada Percobaan Pertama ...31
Gambar 4.3 Grafik PWM, Sudut dan Theta Dengan Duty Cycle 10% ...32
Gambar 4.4 Perintah di Script Editor Matlab Pada Percobaan Kedua ...35
Gambar 4.5 Grafik PWM, Sudut dan Theta Dengan Duty Cycle 25% ...36
Gambar 4.6 Perintah di Script Editor Matlab Pada Percobaan Ketiga ...39
Gambar 4.7Grafik PWM, Sudut dan Theta Dengan Duty Cycle 75% ...40
Gambar 4.8 Perintah di Script Editor Matlab Pada Percobaan Keempat ...43
xiii
DAFTAR TABEL
Tabel 4.1 Variable Pada Percobaan Pertama ...30
Tabel 4.2 Hubungan Antara PWM, Sudut dan Theta Pada Duty Cycle 10%...33
Tabel 4.3 Variable Pada Percobaan Kedua ...34
Tabel 4.4Hubungan Antara PWM, Sudut dan Theta Pada Duty Cycle 25%... 37
Tabel 4.5Variable Pada Percobaan Ketiga...38
Tabel 4.6Hubungan Antara PWM, Sudut dan Theta Pada Duty Cycle 75%... 42
Tabel 4.7Variable Pada Percobaan Keempat ...42
1 BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Pada sebagian perekayasa, membuat sebuah sistem kendali, dihadapkan pada sebuah permasalahan yaitu, seberapa besar kemampuan, jenis, karakter, sistem kerja dari sebuah kendali. Masing-sistem kendali mempunyai kelebihan dan kekurangan masing-masing. Salah satu sistem yang sering digunakan adalah kendali berbasis Pulse Width Modulation, dimana lebar pulsa dimanfaatkan untuk mengatur kecepatan.
Untuk mengetahui sebuah karakter kendali, dibutuhkan sebuah pendekatan model analog dari sebuah sistem nyata, yang mana persamaan matematis sangat berpengaruh terhadap hasil model tersebut.Dari persamaan tersebut, diaplikasikan kedalam model Matlab, dimasukkan beberapa parameter (nilai) dan dijalankan. Hasil dari simulasi dilakukan berulang-ulang untuk mendapatkan data untuk diambil sebuah kesimpulan hubungan antara beberapa parameter untuk diabmil sebuah kesimpulan tentang karakter kendali dan hasil kendalinya. Dalam skrips ini akan dimodelkan dan disimulasikan bagaimana mengatur kecepatan sebuah motor DC dengan kendali PWM (Pulse Width Modulation) dengan pengaturan Duty Cycle
Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan
daya rendah hingga sedang seperti peralatan mesin dan rolling mills, sebab sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Juga, motor tersebut dibatasi hanya untuk penggunaan di area yang bersih dan tidak berbahaya sebab resiko percikan api pada sikatnya
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
• Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan
• Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
Model memegang peranan penting di bidang ilmu pengetahuan. Biasanya dari segi ekonomi untuk menghemat (waktu dan biaya) ataupun komoditi berharga lainnya. Pemodelan bisa juga dilakukan untuk menghindari resiko kerusakan sistem nyata. Dengan demikian sebuah model diperlukan bilamana percobaan dengan sistem nyata menjadi terhalang karena mahal, berbahaya ataupun merupakan sesuatu yang tidak mungkin untuk dilakukan.
Tiny Mananoma dan Widandi Soetopo (2008) mengasumsikan sistem nyata diwujudkan dari sistem nyata dengan menentukan faktor-faktor dominan (variabel, kendala, dan parameter) yang mengendalikan perilaku dari sistem nyata. Menurut Phillips (1976) dalam bukunya yang berjudul operation research, sebagaimana yang dikutip oleh Tiny Mananoma dan Widandi Soetopo (2008) yang dimaksudkan dengan model adalah representasi sederhana dari sesuatu yang nyata. Dengan pengertian ini menunjukkan bahwa model selalu tidak sempurna.
Gambar 1.2Sistem dan Pemodelan
Istilah pemodelan adalah terjemahan bebas dari istilah modelling.Untuk menghindari berbagai pengertian atau penafsiran yang berbeda-beda, maka istilah pemodelan dapat diartikan sebagai suatu rangkaian aktivitas pembuatan model. Sebagai landasan untuk lebih memahami pengertian pemodelan maka diperlukan suatu penelaahan tentang model secara spesifik ditinjau dari pendekatan sistem.
Dalam konteks terminologi penelitian operasional (operation research), secara umum model didefinisikan sebagai suatu perwakilan atau abstraksi dari
suatu obyek atau situasi aktual. Model melukiskan hubungan-hubungan langsung dan tidak langsung serta kaitan timbal-balik dalam terminologi sebab akibat. Oleh karena suatu model adalah abstraksi dari realita, maka pada wujudnya lebih sederhana dibandingkan dengan realita yang diwakilinya .Model dapat disebut lengkap apabila dapat mewakili berbagai aspek dari realita yang sedang dikaji.
Memang dimungkinkan untuk dapat merancangbangun dengan baik berbagai model sistem tanpa matematik, dan atau mengetahui matematika tanpa analisis sistem.Namun demikian, perumusan matematika yang terpilih dapat mempermudah pengkajian sistem, yang pada umumnya merupakan suatu kompleksitas. Sifat universalitas dari matematik dan notasi-notasinya akan memperlancar komunikasi dan transfer metode yang dikembangkan di suatu negara atau bidang ilmu tertentu ke bidang lainnya.
Kebanyakan para pengguna analisis sistemmenjumpai kesukaran untuk mengimplementasikan notasi-notasi matematika ke dalam format konsepsi disiplin ilmunya.Mereka kemudian memilih alternatif pembuatan model konsepsi (conceptual model) yang sifatnya informal karena terasa lebih mudah.Bagaimanapun juga, para ahli sistem berpendapat bahwa keuntungan lebih besar dibandingkan dengan biaya yang diperlukan dalam megkaji permasalahan penelitian secara matematis. Hal ini disebabkan adanya daya guna yang berlipat ganda pada proses rancang bangun dan analisis dalam bentuk bahasa matematika yang sangat penting dalam teori ekonomi, keteknikan, ilmu alam hingga ilmu-ilmu sosial.
1.2 Permasalahan
Dalam merancang sebuah kendali, terkadang kita belum mengetahui karakter kendali tersebut, namun harus mengetahui karakternya, yang disesuaikan dengan kebutuhan. Motor DC yang digunakan untuk suatu fungsi tertentu, diperlukan sebuah sistem pengendalian, baik untuk mengendalikan kecepatan putar, arah putar dan sebagainya.
Pengendalian kecepatan motor DC sangat berguna dalam penerapan dalam kenyataan diantaranya sebagai pengendalian kecepatan gerak robot,penggubah arah, motor industry, dan lainnya. Pada dunia nyata, motor DC bisadikendalikan dan dirasakan kecepatan motor dengan menggunakan fitur PWM. Namun dalam skripsi ini akan dibahas pengendalian kecepatan motor DC dengan sistem pemodelan.
1.3 Perumusan Masalah
1. Apakah ada hubungan antara perubahan lebar pulsa PWM terhadap perubahan nilai sudut dan Sudut pada motor DC?
1.4 Pembatasan Masalah
Meneliti karakter motor DC jika dikendalikan dengan PWM dengan mengatur Duty Cylce 10%, 25%, 75% dan 100%. Adapun spesifikasi motor adalah besaran momen inersia (J) =0.01, damping (b) =0.1 nms, back emf (K) =0.01 nm/a; resistansi R = 1 Ohm danInduktasi (L) = 0.5 H, melaluipendekatan pemodelan dan simulasi.
1.5 Manfaat Penelitian
1. Mengetahui karakteristik motor DC bila dijalankan melaui proses pemodelan dan simulasi
2. Sebagai referensi bagi perekayasa kendali dalam membuat kendali sebuah sistem dengan motor DC sebagai objeknya
1.6 Sistematika Laporan
BAB I Pendahuluan, Berisikan Latar Belakang MAsalah, Permasalahan, Perumusan Masalah, Manfaat Penelitia dan Sistematika Laporan
BAB II Landasan Teori, berisikan Pengertian Motor DC, Prinsip Dasar Cara Kerja dan Metode PWM
BAB III Metodologi Penelitia, berisikan Metode Pengambilan Data, Perancangan Blok Diagram Simulink, Obyek Penelitian, Diadram Proses Pembuatan Skripsi
BAB IV Hasil dan Pembahasan berisikan Hasil dan Analisa Percobaan Pertama, Hasil dan Analisa Percobaan Kedua, Hasil dan Analisa Percobaan Ketiga, Hasil dan Analisa Percobaan Keempat
BAB V Penutup berisikan Kesimpulan dan Saran
DAFTAR PUSTAKA
Berisikan Sumber pustaka yang mendukung dalam pembuatan skripsi ini
7
BAB II
LANDASAN TEORI2.1 Pengertian Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan,dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri.
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
8
Gambar 2.2Motor D.C Sederhana
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/ makalahmotordc.doc)
Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
2.2 Prinsip Dasar Cara Kerja
Jika arus lewat pada suatu konduktor, timbul medan magnet di sekitar konduktor. Arah medan magnet ditentukan oleh arah aliran arus pada konduktor.
Gambar 2.3Medan magnet yang membawa arus mengelilingi konduktor (Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/
Aturan Genggaman Tangan Kanan bisa dipakai untuk menentukan arah garis fluks di sekitar konduktor. Genggam konduktor dengan tangan kanan dengan jempol mengarah p
menunjukkan arah garis fluks. Gambar dibawah
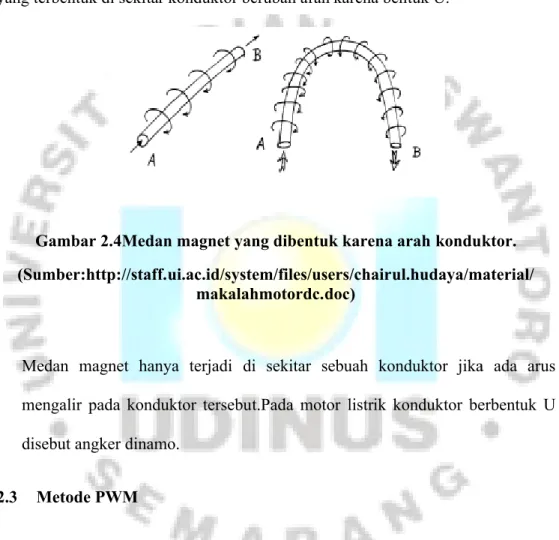
yang terbentuk di sekitar konduktor berubah arah karena bentuk U.
Gambar 2.4Medan magnet
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/
Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus mengalir pada konduktor tersebut.
disebut angker dinamo.
2.3 Metode PWM
Metode Pulse Width Modulation (PWM) adalah metode yang cukup efektif untuk mengendalikan kecepatan motor DC. PWM ini bekerja dengan cara membuat gelombang persegi yang memiliki perbandingan pulsa high terhadap pulsa low yang telah tertentu, biasanya diskalakan dari 0 hingga 100%. Gelombang persegi ini memiliki frekuensi
Aturan Genggaman Tangan Kanan bisa dipakai untuk menentukan arah garis fluks di sekitar konduktor. Genggam konduktor dengan tangan kanan dengan jempol mengarah pada arah aliran arus, maka jari-jari anda akan ukkan arah garis fluks. Gambar dibawah menunjukkan medan magnet yang terbentuk di sekitar konduktor berubah arah karena bentuk U.
Medan magnet yang dibentuk karena arah konduktor. (Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/
makalahmotordc.doc)
Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus mengalir pada konduktor tersebut.Pada motor listrik konduktor berbentuk U disebut angker dinamo.
Metode Pulse Width Modulation (PWM) adalah metode yang cukup efektif untuk mengendalikan kecepatan motor DC. PWM ini bekerja dengan cara membuat gelombang persegi yang memiliki perbandingan pulsa high terhadap pulsa low yang telah tertentu, biasanya diskalakan dari 0 hingga 100%. Gelombang persegi ini memiliki frekuensi Kecepatan Sudutp (biasanya max 10 9
Aturan Genggaman Tangan Kanan bisa dipakai untuk menentukan arah garis fluks di sekitar konduktor. Genggam konduktor dengan tangan kanan jari anda akan menunjukkan medan magnet
konduktor. (Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/
Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus konduktor berbentuk U
Metode Pulse Width Modulation (PWM) adalah metode yang cukup efektif untuk mengendalikan kecepatan motor DC. PWM ini bekerja dengan cara membuat gelombang persegi yang memiliki perbandingan pulsa high terhadap pulsa low yang telah tertentu, biasanya diskalakan dari 0 hingga 100%. p (biasanya max 10
10
KHz) namun lebar pulsa high dan low dalam 1 periode yang akan diatur. Perbandingan pulsa high terhadap low ini akan menentukan jumlah daya yang diberikan ke motor DC.
PWM merupakan sebuah mekanisma untuk membangkitkan sinyal keluaranyang periodenya berulang antara high dan low dimana kita dapat mengontrol durasisinyal high dan low sesuai dengan yang kita inginkan. Duty cycle merupakanprosentase periode sinyal high dan periode sinyal, prosentase duty cycle akanbebanding lurus dengan tegangan rata-rata yang dihasilkan.Berikut ilustrasi sinyalPWM, misalkan kondisi high 5 V dan kondisi low 0 V.
Pengaturan lebar pulsa modulasi atau PWM merupakan salah satu teknik yang“ampuh” yang digunakan dalam sistem kendali (control system) saat ini. Pengaturanlebar modulasi dipergunakan di berbagai bidang yang sangat luas, salah satudiantaranya adalah: speed control (kendali kecepatan), power control (kendali sistemtenaga), measurement and communication (pengukuran atau instrumentasi dantelekomunikasi).
2.3.1 Prinsip Dasar PWM
Modulasi lebar pulsa (PWM) dicapai/diperoleh dengan bantuan sebuah gelombangkotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untukmendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai rata-ratadari gelombang tersebut.
11
Gambar 2.5Bentuk gelombang kotak (pulsa) dengan kondisi high 5V dan low 0V
(Sumber:fab.cba.mit.edu/classes/MIT/961.04/topics/pwm.pdf)
Ton adalah waktu dimana tegangan keluaran berada pada posisi tinggi(baca: high atau 1) dan, Toff adalah waktu dimana tegangan keluaran berada padaposisi rendah (baca: low atau 0).Anggap Ttotal adalah waktu satu siklus atau penjumlahan antara Ton dengan Toff , biasadikenal dengan istilah “periode satu gelombang”.
Ttotal = Ton + Toff
Siklus kerja atau duty cycle sebuah gelombang di definisikan sebagai,
= + =
Tegangan keluaran dapat bervariasi dengan duty-cycle dan dapat dirumusan sebagaiberikut, = sehingga : =
Dari rumus diatas dapat ditarik kesimpulan bahwa tegangan keluaran dapat diubahubahsecara langsung dengan mengubah nilai Ton.
Apabila Ton adalah 0, Vout juga akan 0.
Apabila Ton adalah Ttotal maka Vout adalah Vinatau katakanlah nilai maksimumnya.
12
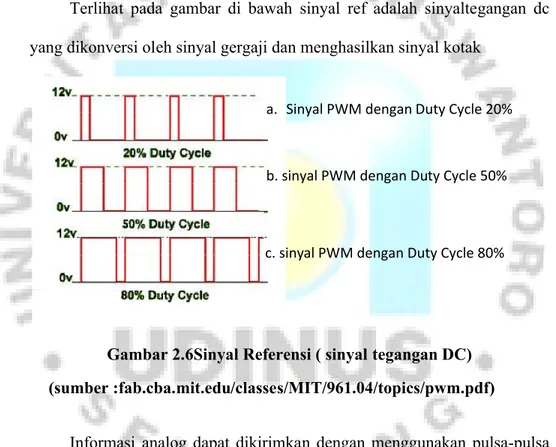
PWM bekerja sebagai switching power suplai untuk mengontrol on dan off.Tegangan dc dikonvert menjadi sinyal kotak bolak balik, saat on mendekati tegangan puncak dan saat off menjadi nol (0) volt. Jika frekuensi switching cukup tinggi maka kecepatan motor yang dikendalikan akan semakin sesuai dengan yangdiharapkan. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyaldisebabkan oleh PWM).
Terlihat pada gambar di bawah sinyal ref adalah sinyaltegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak
Gambar 2.6Sinyal Referensi ( sinyal tegangan DC) (sumber :fab.cba.mit.edu/classes/MIT/961.04/topics/pwm.pdf)
Informasi analog dapat dikirimkan dengan menggunakan pulsa-pulsa teganganatau pulsa-pulsa arus.Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa-pulsapersegi yang berulang- ulang.Salah satu teknik modulasi yang sering digunakanadalah teknik modulasi durasi atu lebar dari waktu tunda positif ataupun waktu tundanegatif pulsa-pulsa persegi tersebut.Untuk membangkitkan sinyal PWM adalahdengan menggunakan
a. Sinyal PWM dengan Duty Cycle 20%
b. sinyal PWM dengan Duty Cycle 50%
fungsi timer/counter yang dibandingkan nilainy tertentu.
Gambar 2.7Medan magnet mengelilingi konduktor dan diantara kutub.
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/ Jika konduktor berbentuk U (angker dinamo) diletakkan di antara kutub uatara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan medan magnet kutub.
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/
Lingkaran bertanda A dan B merupakan ujung konduktor yang dilengkungkan (looped conductor
keluar melalui ujung B.Medan
menambah medan pada kutub dan menimbulkan medan yang kuat di bawah fungsi timer/counter yang dibandingkan nilainya dengan sebuahregister
Medan magnet mengelilingi konduktor dan diantara kutub.
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/ makalahmotordc.doc)
Jika konduktor berbentuk U (angker dinamo) diletakkan di antara kutub uatara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan
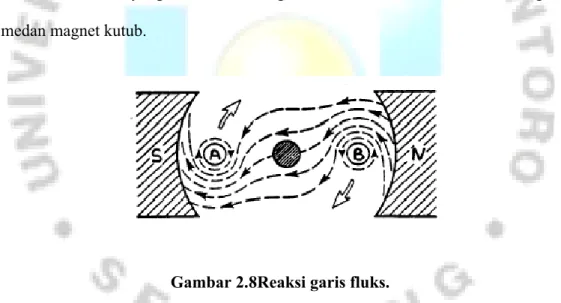
Gambar 2.8Reaksi garis fluks.
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/ makalahmotordc.doc)
Lingkaran bertanda A dan B merupakan ujung konduktor yang looped conductor). Arus mengalir masuk melalui ujung A dan keluar melalui ujung B.Medan konduktor A yang searah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di bawah 13
a dengan sebuahregister
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/ Jika konduktor berbentuk U (angker dinamo) diletakkan di antara kutub uatara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/
Lingkaran bertanda A dan B merupakan ujung konduktor yang ). Arus mengalir masuk melalui ujung A dan konduktor A yang searah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di bawah
14
konduktor. Konduktor akan berusaha bergerak ke atas untuk keluar dari medan kuat ini. Medan konduktor B yang berlawanan arah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di atas konduktor. Konduktor akan berusaha untuk bergerak turun agar keluar dari medan yang kuat tersebut. Gaya-gaya tersebut akan membuat angker dinamo berputar searah jarum jam.
Mekanisme kerja untuk seluruh jenis motor secara umum : Arus listrik dalam medan magnet akan memberikan gaya.
Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran / loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
Pasangan gaya menghasilkan tenaga putar / torque untuk memutar kumparan. Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan
tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan.
Pada motor dc, daerah kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konversi dari energi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet disini selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus sebagai tempat berlangsungnya proses perubahan energi, daerah tersebut dapat dilihat pada gambar 2.6 :
15
Gambar 2.9Prinsip kerja motor dc
(Sumber:http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/ makalahmotordc.doc)
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan. Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor.
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban dalam hal ini mengacu kepada keluaran tenaga putar / torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan ke dalam tiga kelompok :
Beban torque konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torquenya tidak bervariasi. Contoh beban dengan torque konstan adalah corveyors, rotary kilns, dan pompa displacement konstan.
Beban dengan variabel torqueadalah beban dengan torque yang bervariasi dengan kecepatn operasi. Contoh beban dengan variabel torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kuadrat kecepatan).
16
Beban dengan energi konstan adalah beban dengan permintaan torque yang berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
17 BAB III
METODOLOGI PENELITIAN
3.1 Metode Pengambilan Data
3.1.1 Mempelajari karakter dari motor DC
Sebelum membuat sebuah sistem, kita harus mempelajari bagaimana sistem itu bekerja dalam dunia nyata, dengan cara mencari referensi/ penelitian tentang Motor DC. Pada suatu sistem yang membutuhkan Motor sebagai penggerak terkadang diperlukan suatu kecepatan putaran yang presisi untuk pengendalian plant. Maka dari itu diperlukan suatu alat atau metode untuk mengendalikan dan mendeteksi kecepatan dari suatu motor DC.
3.1.2 Membuat sebuah model analog dari Motor DC
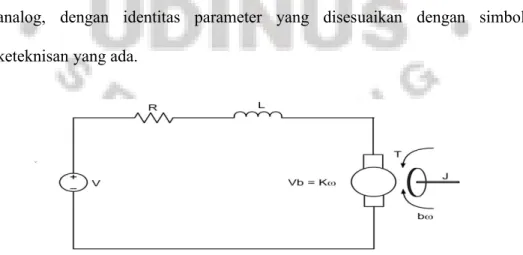
Bentuk motor DC yang sudah dikemas secara manufaktur, tentu ada gambar rangkaianya secara umum.Dari gambar ini dibuat menjadi model analog, dengan identitas parameter yang disesuaikan dengan simbol keteknisan yang ada.
Gambar 3.1Model Analog Motor DC
18
3.1.3 Memodelkan Motor DC Secara Matematis
Bentuk analog yang ada, kemudian dibuat persamaan matematis sesuai dengan aturan keilmuan yang ada.Adapun dalam pemodelan matlab, fungsi integral dan diferensial sangat dominan. Dari persamaan yang ada, diaplikasikan kedalam blok simulink dalam Matlab.
Pada penelitian kali ini, digunakan Hukum Newton dan Hukum Kirchoff melalui pendekatan Fungsi Transfer.
•Torkamotor berhubungandenganarusarmaturi dan factor konstantaK •Electromotive force (emf), Vb, berhubungandengankecepatanangular
= ……… 1
= = ……… 2
Berdasarkan Hukum Newton dan Kirchoff
+ = ……… 3
+ = − ……… 4
Fungsi transfer persamaan 3 dan 4
+ ( ) = ( ) ……… 5
( ) + ( )
= ( ) − ( )
……… 6
Transformasi Laplace dari 6
19
Disubstitusikan menjadi
( ) + ( ) = ( ) −+ ( ) ………8
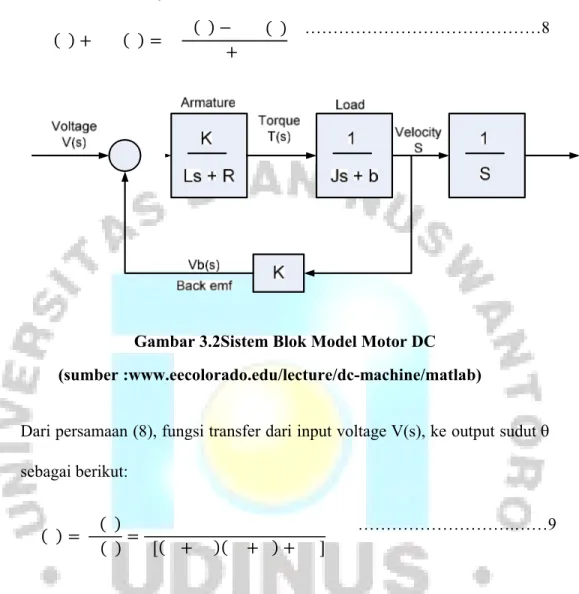
Gambar 3.2Sistem Blok Model Motor DC (sumber :www.eecolorado.edu/lecture/dc-machine/matlab)
Dari persamaan (8), fungsi transfer dari input voltage V(s), ke output sudut sebagai berikut:
( ) = ( )( ) = [( + )( + ) + ] ……….……9
Dari blok diagram, dapat dilihat fungsi transfer function dari input tegangan Vs ke Sudut adalah:
20
3.2 Perancangan Blok Diagram Simulink 3.2.1Blok Simulink Modifikasi
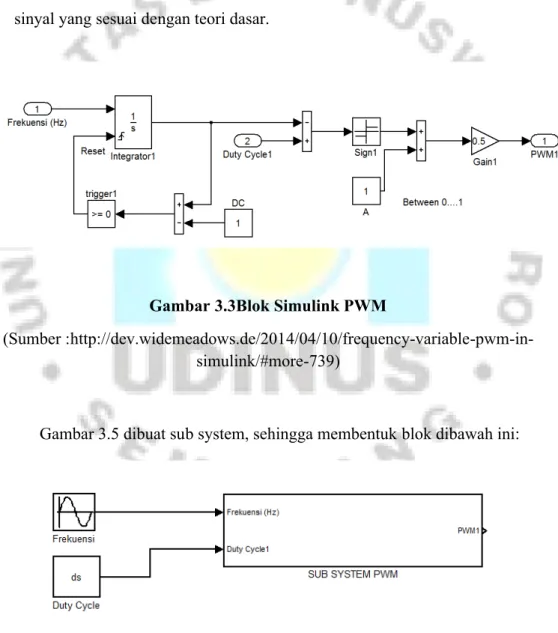
Ketika menggunakan blok PWM pada Simulink, sistem blok model tidak bisa berjalan (terjadi kesalahan). Untuk itu perlu dilakukan modifikasi pengendali PWM menggunakan blok Simulink jenis lain. Dalam membuat sebuah kendali PWM, dilakukan dengan uji dan coba, sehingga didapat bentuk sinyal yang sesuai dengan teori dasar.
Gambar 3.3Blok Simulink PWM
(Sumber :http://dev.widemeadows.de/2014/04/10/frequency-variable-pwm-in-simulink/#more-739)
Gambar 3.5 dibuat sub system, sehingga membentuk blok dibawah ini:
21
Pada input Frekuensi (Hz), diberikan sumber Sinus, dengan pengaturan amplitude dan frekuensi = 0.25. Kemudian inputan Duty Cycle, diberikan blok Constant, dan diberi variable ds, yang mana akan digunakan sebagai variabel pada m-file.
3.2.2Membuat Blok Simulasi dan melakukan Simulasi dalam Simulink Matlab
Persamaan yang didapatkan diaplikasikan ke dalam Matlab dengan memanfaatkan library simulink (model format) maupun menggunakan script (m-file). Dan jika sudah lengkap, maka di jalankan dan melihat sinyal pada fitur Scope, yang berfungsi sama dengan osciloscop pada sistem yang nyata. Setelah didapat bentuk sinyal pertama, maka dilakukan percobaan secara berulang-ulang dengan mengatur parameter, baik pada variable model maupun parameter dalam Model Simulink.
Langkah-langkahnya sebagai berikut:
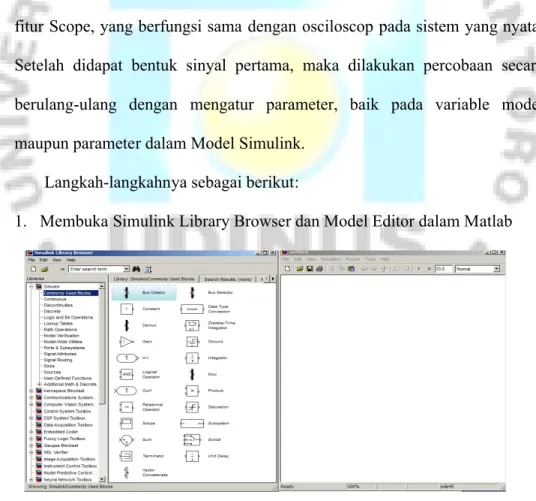
1. Membuka Simulink Library Browser dan Model Editor dalam Matlab
22
2. Melakukan drag and drop pada blok yang disesuaikan dengan model yang ada. Blok simulink, diambil dengan cara ditarik (drag) dan diletakkan di model editor (drop)
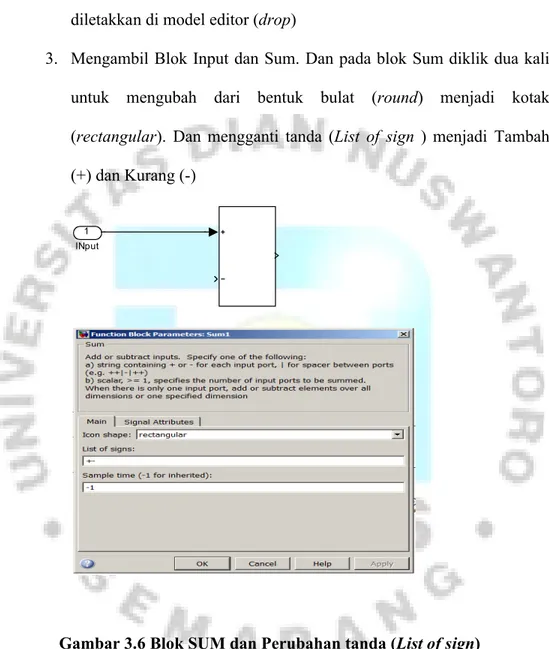
3. Mengambil Blok Input dan Sum. Dan pada blok Sum diklik dua kali untuk mengubah dari bentuk bulat (round) menjadi kotak (rectangular). Dan mengganti tanda (List of sign ) menjadi Tambah (+) dan Kurang (-)
Gambar 3.6 Blok SUM dan Perubahan tanda (List of sign) (sumber : Pengambilan dari Blok Simulink Pada Matlab)
4. Selanjutnya dibangun sebuah model Armature dengan sistem Transfer Fungsi. Pada Simulink Masuk Blok Continous bernama Transfer Fcn. Lakukan klik 2 kali, untuk mengubah parameternya
1 INput
23
menjadi Variabel. Dan inputannya disambungkan ke output dari Sum pada Gambar 3.6
Gambar 3.7 Mengubah Nilai Parameter Transfer Fcn menjadi Variabel Numerator Coefficient diisi K dan Denumerator Coefficient diisi [L R]
(sumber : Pengambilan dari Blok Simulink Pada Matlab)
5. Membangun Load dengan Transfer Fcn berdasarkan persamaan 8 dan inputnya disambungkan ke output dari blok armature (gambar 3.7)
L.s+R K(s) Armature 1 INput J.s+b 1 Load L.s+R K(s) Armature 1 INput
24
Gambar 3.8 Mengubah Nilai Parameter Transfer Fcn menjadi Variabel Numerator Coefficient diisi 1 dan Denumerator Coefficient diisi [J b]
6. Menyisipkan Integrator setelah output dari Load
Gambar 3.9Menambahkan blok Integrator
7. Memberikan Umpan Balik (sebagai damping) menggunakan Blok Gain sebagai Tegangan masuk negatif ke blok SUM.
Gambar 3.10 Pada Gambar 2.9 Disambungkan Dengan Blok Gain J.s+b 1 Load 1 s Integrator L.s+R K(s) Armature 1 INput
25
Gambar 3.11 Memasukkan Gain dan mengubah parameter menjadi b 8. Memberikan blok keluaran (output) sebagai pedoman untuk mencari
hasil/nilai dalam pelaporan nanti. Dalam model ini, ada 3 keluaran yaitu Sudut (angle), Sudut (Angular Speed) dan time sample (t), yang mana t disambungkan ke blok Time, Sudut disambungkan ke output dari blok Load, dan Sudut disambungkan ke keluaran dari Integrator. Output dari pengamatan ini akan disambungkan dengan Scope dan Blok To Workspace.
26
9. Langkah selanjutnya adalah membuat gambar 3.12 Menjadi Subsytem caranya, pilih semua blok yang ada kemudian klik kanan dan pilih Create Subsytem, sehingga Gambarnya menjadi gambar 3.12.
Gambar 3.13 Subsytem Model Blok Motor DC
10. Memberikan Blok untuk melihat Hasil Output, disini akan diberi Blok Scope dan To Workspace. Sebelumnya hapus semua blok Output dan diganti dengan blok diatas, sehingga gambar model menjadi seperti dibawah ini.
Gambar 3.14 Subsytem Model Blok Motor DC dengan Parameter untuk mengukur/pengamatan
3 t 2 Anglular Speed / Theta
1 Angle / Ohmega INput
Angle / Ohmega
Anglular Speed / Theta
t Plant Motor DC
1 INput
27
Gambar 3.15 Perubahan Format Penyimpanan Data ke Workspace Hal diatas dilakukan untuk melakukan editing terhadap tampilan grafik pada scope agar dapat ditampilakan denga jelas pada laporan ini.
11. Menyambungkan Gambar 3.16 Dengan Blok PWM pada gambar 3.6
Gambar 3.16 Blok Simulink Lengkap Motor DC dengan PWM
3.2.3 Menyimpan nilai parameter dan hasil simulasi
Setiap menjalankan simulasi, apapun perubahan baik nilai input maupun output, akan dicatat/ disimpan, sebagai bahan pelaporan. Dalam memudahkan
28
eksekusi program, maka nilai parameter dan variable akan dipanggil melalui m-file, kemudian dipanggil dalam worksheet Matlab dan menjalankan blok dalam Model Editor, mencatat nilai setiap perubahan arah dan menyimpan gambar grafik.
3.2.4 Menganalisa dan mengambil kesimpulan
Dari nilai-nilai input dan hasil output, dianalisis , dicari hubungan langsung maupun tidak langsung antara perubahan parameter dengan keluaran sebagai reaksi kerja dari model Motor DC yang disimulasikan kemudian diambil kesimpulan.
3.3 Obyek Penelitian
Obyek penelitian adalah sebuah motor dengan spesifikasi momen inersia (J) =0.01, damping (b) =0.1 nms, back emf (K) =0.01 nm/a; resistansi R = 1 Ohm danInduktasi (L) = 0.5 H, melaluipendekatan pemodelan dan simulasi.
29
3.4 Diagram Proses Pembuatan Skripsi
30 BAB IV
HASIL DAN PEMBAHASAN
4.1 Hasil dan Analisa Percobaan Pertama
Pada percobaan pertama, variabel dan nilai yang diberikan sesuai dengan tabel 4.1.
Tabel 4.1 Variable Pada Percobaan Pertama
Variabel Nilai Keterangan Blok
ds 0.1 Duty Cycle10%
J 0.01 Blok Model Motor DC
b 0.1 Blok Model Motor DC
K 0.01 Blok Model Motor DC
R 1 Blok Model Motor DC
L 0.5 Blok Model Motor DC
Time Simulation 100 Pada Model Editor
Berdasarkan tabel 4.1, nilai-nilai yang ada diberikan untuk variabel-variabel pada motor DC.Untuk memudahkan pemanggilan variabel-variabel, maka semua nilai dan variabel di atas dibuat dalam sebuah file berbentuk script editor (m-file) dan dipanggil dalam Program Matlab.
31
Gambar 4.1 Perintah di Script Editor Matlab Pada Percobaan Pertama
Kemudian file disimpan dengan namap1.m. Dengan menekan tombol Run atau F5, maka file akan masuk ke Command Window Matlab. Selanjutnya menjalankan file model yang sudah dibuat, dan nilai-nilai pada tabel 4.1 sudah masuk ke variabel motor DC seperti pada gambar 3.18. Jalankan model dan menunggu hasilnya.
Dengan melakukan klik 2 kali pada scope PWM,SUDUT,THETA, maka akan muncul sinyal dibawah ini.
32
33
Tabel 4.2 Hubungan Antara PWM, Sudut dan Theta Pada Duty Cycle 10%
t (s) Pwm Sudut () Kecepatan
Sudut () Sudut ()keteranganKecepatan Sudut () 0-3 0 0 0,1 Diam Naik 4 – 20 1 0 - 0.3 -0.09 Naik Turun 20 – 34 0 0.4 – 1,5 0,1 Naik Naik 35 - 45 1 1,5 -0,08 Naik Turun 46 – 58 0 1,6 – 2,75 0.09 Naik Naik 59 – 68 1 2,76 -0,07 Naik Turun 69 – 85 0 2,77 – 4,1 0,07 Naik Naik 86 – 94 1 4,2 -0.06 Naik Turun 95 - 100 1 4,3 – 4,5 0,06 Naik Naik
Berdasar tabel diatas dapat dijelaskan bahwa saat t=0 sampai 3, maka amplitudo PWM kearah bawah, sudut yang dibentuk sebesar antara 0.0 sampai 0.3 radian dan Sudut adalah -0,01 rad/s (berlawanan arah jarum jam. Saat t=4 sampai 20, amplitude PWM kearah atas, sudut yang dibentuk adalah 0,4-1,5 radian dan Sudut adalah -0,09 rad/s. Saat t=21 sampai 34, maka amplitude PWM kearah bawah, dengan sudut yang dibentuk antara 0,4 – 1,5 dan Sudut 0,1 rad/s. pada t = 35-45, , amplitude PWM kearah bawah, sudut yang dibentuk 1,5 rad dan Sudut -0,08 rad/s. Pada saat t=46 sampai 58, PWM kearah atas, sudut yang dibentuk 1,6-2,75 radian dengan Sudut -0,07 rad/s. Pada saat t=59 sampai 68, PWM kearah bawah dengan sudut yang dibentuk sebesar 2,76 dan Sudut 0,07. Pada saat t=69 sampai 85,PWM kearah atas, sudut yang dibentuk motor adalah 2,77 sampai 4,1 radian dengan Sudut 0,07. Pada saat t=86 sampai 94, PWM kearah bawah dengan sudut pada motor adalah 4,2 dan kecepatan sudut
-34
0,6 rad/s. Dan saat 95 sampai 100, sudut yang dibentuk 4,3-4,5 dengan Sudut = 0,06 rad/s
4.2 Hasil dan Analisa Percobaan Kedua
Pada percobaan pertama, variabel dan nilai yang diberikan sesuai dengan tabel 4.2.
Tabel 4.3 Variable Pada Percobaan Kedua
Variabel Nilai Keterangan Blok
ds 0.25 Duty Cycle 25%
J 0.01 Blok Model Motor DC
b 0.1 Blok Model Motor DC
K 0.01 Blok Model Motor DC
R 1 Blok Model Motor DC
L 0.5 Blok Model Motor DC
Time Simulation 100 Pada Model Editor
Berdasarkan tabel 4.2, nilai-nilai yang ada diberikan untuk variabel-variabel pada motor DC.Untuk memudahkan pemanggilan variabel-variabel, maka semua nilai dan variabel di atas dibuat dalam sebuah file berbentuk script editor (m-file) dan dipanggil dalam Program Matlab.
35
Gambar 4.4Perintah di Script Editor Matlab Pada Percobaan Kedua
Kemudian file disimpan dengan nama p1.m. Dengan menekan tombol Run atau F5, maka file akan masuk ke Command Window Matlab. Selanjutnya menjalankan file model yang sudah dibuat, dan nilai-nilai pada tabel 4.1 sudah masuk ke variabel motor DC seperti pada gambar 3.18. Jalankan model dan menunggu hasilnya.
Dengan melakukan klik 2 kali pada scope PWM,SUDUT,THETA, maka akan muncul sinyal dibawah ini.
36
37
Tabel 4.4 Hubungan Antara PWM, Sudut dan Theta Pada Duty Cycle 25%
t (s) Pwm Sudut () Kecepatan
Sudut () Sudut ()keteranganKecepatan Sudut () 0-5 1 0,2 0,1 naik Naik 6 – 10 0 0,33 0.08 naik Turun 11 – 35 1 0.5 – 1,9 0,1 naik Naik 36 - 42 0 2,0 -0,08 naik Turun 43 – 60 1 2,1 – 3,2 0.09 naik Naik 61 – 71 0 3,3 -0,07 naik Turun 72 – 85 1 3,4 – 4,5 0,07 naik naik 86 – 94 0 4,5 -0.06 naik Turun 95 - 100 1 4,6 – 5 0,06 naik Naik
Berdasar tabel diatas dapat dijelaskan bahwa saat t=0 sampai 5, maka amplitudo PWM kearah atas, sudut yang dibentuk sebesar antara 0.2dan Sudut adalah 0,1 rad/s (berlawanan arah jarum jam). Saat t=6 sampai 10, amplitude PWM kearah bawah, sudut yang dibentuk adalah 0,33 radian dan Sudut adalah 0,08 rad/s. Saat t=11 sampai 35, maka amplitude PWM kearah atas, dengan sudut yang dibentuk antara 0,5 – 1,9 radian dengaSudut 0,1 rad/s. Pada saat t = 36 sampai 42, amplitude PWM kearah bawah, sudut yang dibentuk 2,1 – 3,2 rad dan Sudut -0,08 rad/s. Pada saat t=43 sampai 60, PWM kearah atas, sudut yang dibentuk 2,6 – 3,2 radian dengan Sudut0,09 rad/s. Pada saat t=60 sampai 71, PWM kearah bawah dengan sudut yang dibentuk sebesar 3,3 dan Sudut-0,07. Pada saat t=72 sampai 85,PWM kearah atas, sudut yang dibentuk motor adalah 3,4 sampai 4,5 radian dengan Sudut 0,07. Pada saat t=86 sampai 94, PWM kearah bawah dengan sudut pada motor adalah 4,5 dan kecepatan sdut -0,6
38
rad/s. Dan saat 95 sampai 100, sudut yang dibentuk 4,6-5 dengan Sudut = 0,06 rad/s
4.3 Hasil dan Analisa Percobaan Ketiga
Pada percobaan pertama, variabel dan nilai yang diberikan sesuai dengan tabel 4.2.
Tabel 4.5 Variable Pada Percobaan Ketiga
Variabel Nilai Keterangan Blok
ds 0.75 Duty Cycle 75%
J 0.01 Blok Model Motor DC
b 0.1 Blok Model Motor DC
K 0.01 Blok Model Motor DC
R 1 Blok Model Motor DC
L 0.5 Blok Model Motor DC
Time Simulation 100 Pada Model Editor
Berdasarkan tabel 4.2, nilai-nilai yang ada diberikan untuk variabel-variabel pada motor DC.Untuk memudahkan pemanggilan variabel-variabel, maka semua nilai dan variabel di atas dibuat dalam sebuah file berbentuk script editor (m-file) dan dipanggil dalam Program Matlab.
39
Gambar 4.6Perintah di Script Editor Matlab Pada Percobaan Ketiga
Kemudian file disimpan dengan nama p1.m. Dengan menekan tombol Run atau F5, maka file akan masuk ke Command Window Matlab. Selanjutnya menjalankan file model yang sudah dibuat, dan nilai-nilai pada tabel 4.1 sudah masuk ke variabel motor DC seperti pada gambar 3.18. Jalankan model dan menunggu hasilnya.
Dengan melakukan klik 2 kali pada scope PWM,SUDUT,THETA, maka akan muncul sinyal dibawah ini.
40
41
Tabel 4.6 Hubungan Antara PWM, Sudut dan Theta Pada Duty Cycle 75%
t (s) Pwm Sudut () Kecepatan
Sudut () Sudut keterangan () Kecepatan Sudut () 0-5 1 0 0,1 Diam Naik 6 – 10 0 0,5 0,1 Naik Turun 11 – 17 1 0,33 0,1 naik Naik 18 - 38 0 1 0,06 naik Turun 39 – 42 1 1,1 – 2,9 -0.06 naik Naik 42 – 63 0 3 – 4,5 -0,07 naik Turun 63 – 70 1 4,5 0,07 naik naik 71 – 90 0 4,6 - 6,5 -0.08 naik Turun 91 - 100 1 6,7 – 7,1 0,8 naik Naik
Berdasar tabel diatas dapat dijelaskan bahwa saat t=0 sampai 5, maka amplitudo PWM kearah atas, sudut yang dibentuk sebesar antara 0 dan Sudut adalah 0,1 rad/s (berlawanan arah jarum jam). Saat t=6 sampai 10, amplitude PWM kearah bawah, sudut yang dibentuk adalah 0,5 radian dan Sudut adalah 0,1 rad/s. Saat t=11 sampai 17, maka amplitude PWM kearah atas, dengan sudut yang dibentuk antara 0,33 radian denganSudut 0,1 rad/s. Pada saat t = 18 sampai 38, amplitude PWM kearah bawah, sudut yang dibentuk 1 radian dan Sudut0,06 rad/s. Pada saat t=39 sampai 42, PWM kearah atas, sudut yang dibentuk 1,1 – 2,9 radian dengan Sudut-0,06 rad/s. Pada saat t=42 sampai 63, PWM kearah bawah dengan sudut yang dibentuk sebesar 3 – 4,5 radian dan Sudut -0,07. Pada saat t=63 sampai 70, amplitude PWM kearah atas, sudut yang dibentuk motor adalah 4,5 radian dengan Sudut 0,07. Pada saat t=71 sampai 90, PWM kearah bawah dengan sudut pada motor adalah 4,6-5,6 radian dan kecepatan sdut -0,8 rad/s. Dan
42
saat 91 sampai 100, PWM mengarah kebawah, sudut yang dibentuk 6,7-7,1 radian dengan Sudut = 0,8 rad/s.
4.4 Hasil dan Analisa Percobaan Keempat
Pada percobaan pertama, variabel dan nilai yang diberikan sesuai dengan tabel 4.4.
Tabel 4.7 Variable Pada Percobaan Keempat
Variabel Nilai Keterangan Blok
ds Duty Cycle 100%
J 0.01 Blok Model Motor DC
b 0.1 Blok Model Motor DC
K 0.01 Blok Model Motor DC
R 1 Blok Model Motor DC
L 0.5 Blok Model Motor DC
Time Simulation 100 Pada Model Editor
Berdasarkan tabel 4.2, nilai-nilai yang ada diberikan untuk variabel-variabel pada motor DC.Untuk memudahkan pemanggilan variabel-variabel, maka semua nilai dan variabel di atas dibuat dalam sebuah file berbentuk script editor (m-file) dan dipanggil dalam Program Matlab.
43
Gambar 4.8Perintah di Script Editor Matlab Pada Percobaan Keempat
Kemudian file disimpan dengan nama p1.m. Dengan menekan tombol Run atau F5, maka file akan masuk ke Command Window Matlab. Selanjutnya menjalankan file model yang sudah dibuat, dan nilai-nilai pada tabel 4.1 sudah masuk ke variabel motor DC seperti pada gambar 3.18. Jalankan model dan menunggu hasilnya.
Dengan melakukan klik 2 kali pada scope PWM,SUDUT,THETA, maka akan muncul sinyal dibawah ini.
44
45
Tabel 4.8 Hubungan Antara PWM, Sudut dan Theta Pada Duty Cycle 100%
t (s) Pwm Sudut () Kecepa tan Sudut () keterangan Sudut () Kecepatan Sudut() 0-5 1 1 0,1 naik Naik 6 – 10 1 1-1,99 0,09 naik Turun 11 – 20 1 2 0,08 naik Turun 21 - 30 1 3 0,07 naik Turun 31 – 40 1 4 0,06 naik Turun 41 – 50 1 5 0,05 naik Turun 50 – 60 1 6 0,04 naik Turun 61 – 85 1 6,1-8 0,03 naik Turun 85 - 100 1 8,1-10 0,02 naik Turun
Saat duty cycle = 100 %, maka PWM membentuk sinyal DC. Saat t=0 sampai 5, maka sudutnya 1 radian dan Sudutnya 0,1. Saat t=6 sampai 10, maka sudutnya 1-1,99 radian dan Sudutnya 0,09 rad/s. saat t=11 – 20, maka sudut yang dibentuk 2 radian dan Sudutnya 0,08. Saat t=21 sampai 30, sudut yang dibentuk 3 radian dan Sudut 0,07 rad/s. saat t=31 sampai 40, maka sudut yang dibentuk sebesar 4 radian. Saat t=41 sampai 50, sudut yang dibentuk 5 radian dan kecepata sudut 0,05 rad/s. saat t=50 sampai 60, maka sudut yang dibentuk adalah 6 radian dan kecepata sudut = 0,04. Saat t=61 sampai 85, maka sudut yang dibentuk adalah 6,1 – 8 rad/s dan Sudut sebesar 0,03 rad/s. Saat t=91 sampai 100, maka sudut = 8,1 sampai 10 dengan Sudut 0,02 rad/s.
46 BAB V PENUTUP
5.1 Kesimpulan
1. Pada duty cycle 10 % dengan waktu 100 detik, pada detik 0 – 3, PWM posisi 0, maka sudut minimal yang dibentuk adalah 0 berarti diam dan kecepatan naik menjadi 0,1 yang berarti naik dan saat waktu mencapai 95-100 detik, maka sudut yang dibentuk sebesar 4,3 – 4,5 derajat dengan kecepatan sudur 0,06.
2. Pada duty cycle 25 % dengan waktu 100 detik, pada detik 0 – 5, PWM posisi 1, maka sudut minimal yang dibentuk adalah 0,2 berarti naik dan kecepatan naik menjadi 0,1 yang berarti naik dan saat waktu mencapai 95-100 detik, maka sudut yang dibentuk sebesar 4,6 – 5 derajat dengan kecepatan sudur 0,06.
3. Pada duty cycle 25 % dengan waktu 100 detik, pada detik 0 – 5, PWM posisi 1, maka sudut minimal yang dibentuk adalah 0,2 berarti naik dan kecepatan naik menjadi 0,1 yang berarti naik dan saat waktu mencapai 95-100 detik, maka sudut yang dibentuk sebesar 4,6 – 5 derajat dengan kecepatan sudur 0,06.
4. Pada duty cycle 75 % dengan waktu 100 detik, pada detik 0 – 5, PWM posisi 1, maka sudut minimal yang dibentuk adalah 0 berarti diam dan kecepatan naik menjadi 0,1 yang berarti naik dan saat waktu mencapai
47
95-100 detik, maka sudut yang dibentuk sebesar 6,7 – 7,1 derajat dengan kecepatan sudur 0,8
5. Pada duty cycle 100 % dengan waktu 100 detik, pada detik 0 – 5, PWM posisi 1, maka sudut minimal yang dibentuk adalah 1 berarti naik dan kecepatan naik menjadi 0,1 yang berarti naik dan saat waktu mencapai 85-100 detik, maka sudut yang dibentuk sebesar 8,1 – 10 derajat dengan kecepatan sudur 0,02
6. Semakin besar duty cycle maka kecepatan putar motor semakin besar
5.2 Saran
1. Kedepan diharapkan pengembangan penelitian ini dengan membuat pendekatan lain dari sebuah sistem model yang baru dan dibandingkan dengan penelitian ini
2. Ada kemungkinan pemodelan dan hasil dalam penelitian ini belum sesuai harapan, diharapkan ada yang memperbaikinya dimasa yang akan adatang
48
DAFTAR PUSTAKA
Cavallo, Alberto, Roberto Setola and Fransesco Vasca, 1996, Using Matlab, Simulink and Control System Toolbox, Prentice Hall, London. Printed and bound in Great Britain by Hartnools Limited, Bodmin, Cornwall.
Introduction to Switched-Mode Converter Modelingusing MATLAB/Simulink (www.eecolorado.edu/lecture/matlab, diunduh tanggal 14 Juli 2014)
J. Watson, Hugh and Jhon H. Blackstone, Jr., 1989, Computer Simulation (Second Edition), University of Georgia, USA. Printed by John Wiley and Sons Singapore.
Mananoma, Tiny dan Widandi Soetopo, 2008, Pemodelan Sebagai Sarana Dalam Mencapai Solusi Optimal, Jurusan Teknik Sipil Universitas Gajah Mada: Yogyakarta.
Sumanto, 1994, Mesin Arus Searah. Jogjakarta: Penerbit ANDI OFFSET,
http://staff.ui.ac.id/system/files/users/chairul.hudaya/material/makalahmotordc.do c (diunduh tanggal 19 Juli 2014)
http://fab.cba.mit.edu/classes/MIT/961.04/topics/pwm.pdf (diunduh tanggal 20 Juli 2014)
Permanent Magnet DC Machine Simulation inMATLAB Simulink (www.mathwork.com, dibaca dan diunduh tanggl 21 Juli 2014)
http://dev.widemeadows.de/2014/04/10/frequency-variable-pwm-in-simulink/#more-739 (diunduh tanggal 26 Agustus 2014)

![Gambar 3.7 Mengubah Nilai Parameter Transfer Fcn menjadi Variabel Numerator Coefficient diisi K dan Denumerator Coefficient diisi [L R]](https://thumb-ap.123doks.com/thumbv2/123dok/2085797.3029579/36.918.215.752.211.960/mengubah-parameter-transfer-variabel-numerator-coefficient-denumerator-coefficient.webp)
