Sistem Penentuan Posisi dan Navigasi
DISKUSI KELOMPOK: KONSEP SISTEM NAVIGASI
Program Pascasarjana Teknik Geomatika Fakultas Teknik
Universitas Gadjah Mada (UGM) Yogyakarta
2014
Anindya Sricandra Prasidya
Dany Puguh Laksono
2
KONSEP SISTEM NAVIGASI
Anindya Sricandra P, Dany Laksono
I. Pengertian Navigasi
Farrel (2008) merujuk pada banyak literature tentang autonomous vehicle menyebutkan bahwa navigasi terbagi menjadi dua pengertian:
1. Penentuan secara akurat kondisi/keberadaan kendaraan (vehicle state), antara lain posisi, kecepatan, dan sikap (attitude) nya.
2. Merencanakan dan melaksanakan maneuver yang berguna untuk perpindahan menuju lokasi yang diinginkan.
Istilah navigasi sendiri dipakai untuk merujuk pada proses estimasi berbasis kinematik vehicle state (posisi, kecepatan, dan attitude) secara realtime sebagai acuan untuk menentukan manuver (pergerakan) kendaraan sepanjang trayektori. Vehicle state berguna untuk control otomatis, realtime planning, data logging, Simultaneous Location and Mapping (SLAM), atau komunikasi operator yang dipakai pada navigasi. Navigasi sering digunakan untuk memandu suatu objek, baik manusia, kendaraan maupun robot, untuk melewati suatu daerah yang belum dikenali sebelumnya.
Pendekatan klasik pada estimasi vehicle state adalah dengan melengkapi kendaraan dengan sensor inersia yang mampu mengukur percepatan dan kecepatan sudut kendaraan. Dengan kalibrasi dan inisialisasi yang sesuai, integrasi kecepatan sudut menyediakan sebuah estimasi bagi attitude, ketika diintegrasikan dengan percepatan maka akan menyeridkan estimasi kecepatan dan posisi. Lingkungan integrasi pada pendekatan ini memiliki aspek positif dan negative. Pada aspek positif, integrasi akan memperhalus kesalahan frekuensi tinggi (sensor noise). Pada aspek negatifnya, integrasi kesalahan frekuensi rendah karena adanya bias, kesalahan faktor skala, atau ketidaklurusan akan menyebabkan peningkatan kesalahan antara vehicle state terestimasi dan vehicle state sebenarnya. Estimasi vehicle state dihitung dengan integrasi data dari sensor high-rate yang dikoreksi menggunakan pengukuran dari sensor low rate yang sesuai.
II. Karakteristik Navigasi
Beberapa karakteristik navigasi yang bisa diperoleh dari pengertian mengenai navigasi di atas setidaknya ada 5 hal:
1. Vehicle state
Vehicle state adalah kondisi dan lokasi kendaraan atau suatu benda dalam suatu skala waktu tertentu, terkait pada posisi, kecepatan, dan attitudenya. Posisi adalah letak suatu benda dalam suatu datum/kerangka referensi dan hanya dalam satu titik waktu (epoch) saja, sedangkan kecepatan adalah turunan dari posisi yang menyatakan perubahan posisi suatu benda/titik/kendaraan terhadap satuan waktu tertentu. Attitude/sikap kendaraan adalah kondisi
3 benda/titik saat berada pada satu titik terhadap sumbu tertentu pada satu waktu, biasanya dinyatak dalam putara pada sumbu x (roll), pada sumbu y (pitch), dan pada sumbu z (yaw).
2. Estimasi
Estimasi adalah perhitungan prediksi dan interpolasi suatu nilai pada suatu satuan waktu tertentu (bisa waktu maju atau mundur), dalam navigasi estimasi dipakai untuk mengestimasi posisi, kecepatan, dan attitude sepanjang trayektori benda/kendaraan.
3. Trajectory
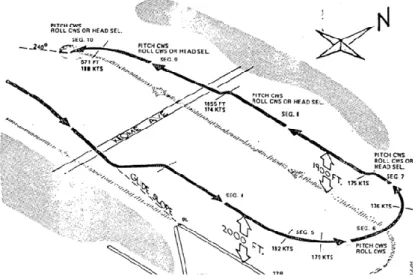
Trayektori adalah lintasan pergerakan suatu benda yang berpindah pada satuan waktu tertentu, dalam setiap titik pada trayektori terdiri dari nilai posisi, kecepatan, dan attitude, yang bisa menghasilkan akselerasi atau percepatan. Trayektori bisa berlaku pada benda yang memiliki kecepatan seperti satelit kendaraan di darat, kapal laut, pesawat, dan lain-lain. Contoh trajektori yang banyak dijumpai dalam dunia pemetaan adalah flight-path atau jalur penerbangan pesawat yang diperlukan pada saat pemetaan dengan menggunakan pesawat udara.
Gambar 1: Trayektori pesawat dalam bentuk flight path
4. Realtime
Pada system navigasi, posisi, kecepatan, dan attitude diukur dan dihitung secara langsung pada kondisi kendaraan/benda masih bergerak.
5. Kinematik
Pada system navigasi benda yang diukur posisinya adalah suatu benda yang tidak statis atau terus mengalami pergerakan dalam waktu tertentu. Sehingga proses perhitungan untuk penentuan kecepatannya akan berbeda dan harus dipertimbangkan sikap saat benda tersebut bergerak juga.
4
III. Akuisisi Data untuk Navigasi
Berdasarkan metode akuisisi data yang digunakan untuk keperluan navigasi, sistem navigasi dapat dibagi menjadi beberapa jenis. Diantaranya:
a. Outdoor/Satellite Navigation
Metode navigasi ini merupakan yang paling populer dan paling banyak digunakan saat ini. Prinsip dasar sistem navigasi berbasis satelit adalah point-positioning, yaitu penentuan posisi dengan menghitung jarak antara titik pengamat dan beberapa buah satelit secara simultan (terus-menerus).
Navigasi berbasis satelit mempersyaratkan pengamatan secara langsung antara pengamat dan satelit. Demikian pula, jumlah satelit yang tersedia untuk menyelesaikan parameter posisi objek yang diamat (x,y,z dan t) harus memenuhi persyaratan, yaitu tersedia minimal 4 buah satelit.
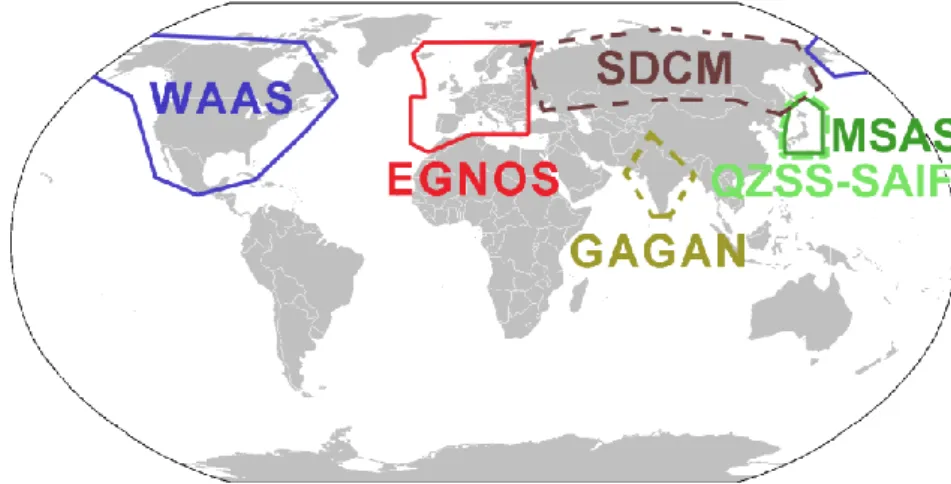
Variasi dari penentuan posisi berbasis satelit murni adalah GNSS-Augmentation (A-GNSS). A-GNSS merupakan penentuan posisi berbasis satelit dengan menggunakan bantuan pemancar sinyal lain untuk mempercepat proses atau membantu penentuan lokasi objek pada saat satelit yang diamat kehilangan sinyal. Pemancar sinyal tersebut dapat berasal dari satelit (Satellite Based Augmentation System/SBAS) lain maupun menara pancar yang berada di permukaan bumi (Ground Based Augmentation System/GBAS). Metode Augmentasi GNSS ini sering digunakan pada area yang terbatas untuk meningkatkan akurasi navigasi dengan menggunakan satelit. Gambar berikut menunjukkan beberapa cakupan Satellite Based Augmentation System yang ada di dunia saat ini:
Gambar 2: Cakupan Satellite-based Augmentation System
Pada perangkat genggam mobile, digunakan variasi lain dari GNSS Augmentation system yang disebut dengan Assisted GPS (aGPS). Pada sistem navigasi ini, menara pancar yang digunakan untuk membantu menentukan lokasi pengamat adalah menara telekomunikasi selular (cell-tower). Dengan menggunakan prinsip triangulasi dari beberapa menara, estimasi posisi pengamat dapat ditentukan sebagai tambahan dari posisi yang diberikan oleh GPS.
5
Gambar 3: Assisted GPS (aGPS)
b. Indoor Navigation/Wifi Positioning System
Sistem navigasi berbasis satelit memiliki kekurangan, yaitu keterbatasan dalam menentukan posisi pada daerah yang terhalang sinyal dari satelit, seperti di bawah kanopi pohon atau di dalam gedung. Untuk itu, perlu suatu metode penentuan posisi dan navigasi lain yang dapat digunakan untuk menentukan posisi secara realtime pada kondisi tersebut. Suatu metode navigasi yang menggunakan prinsip ini adalah metode Indoor Positioning/Indoor Navigation System.
Gambar 4: Keterbatasan Metode Navigasi berbasis Satelit
Prinsip navigasi berbasis wifi adalah triangulasi, yaitu penentuan posisi berdasarkan jarak antara beberapa pemancar sinyal dengan pengamat. Dalam hal ini, pemancar sinyal adalah router yang berfungsi untuk memancarkan sinyal wifi, sedangkan pengamat adalah perangkat genggam (handheld device) yang menerima sinyal dari pemancar sinyal. Dengan menggunakan konsep Signal to Noise Ratio (S/R ratio), maka jarak antara pemancar sinyal dan penerima sinyal dapat diestimasi dan ditentukan posisinya menggunakan triangulasi.
6 Berdasarkan metode yang digunakan, wifi positioning system dapat dibagi menjadi dua macam, yaitu:
1) Wifi Trilateration
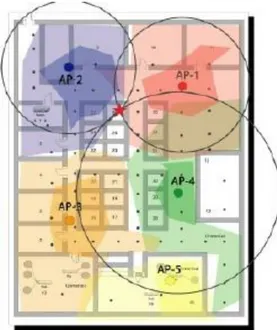
Wifi trilateration menggunakan prinsip S/N Ratio untuk menentukan posisi pengamat berdasarkan jarak antara pengamat dan router wifi. Persamaan yang digunakan untuk menentukan jarak adalah dengan menggunakan Free-space Path Loss (FSPL), yaitu sebagai berikut:
Dimana dB adalah kekuatan sinyal yang diterima oleh pengamat, d adalah jarak antara pengamat dan router, serta f adalah frekuensi sinyal yang diterima pengamat. Angka 92.45 merupakan konstanta penambah untuk sinyal wifi. Dengan menghitung jarak sebagai fungsi dari frekuensi dan kekuatan sinyal, maka trilaterasi dapat dilakukan untuk menentukan posisi pengamat yang dicari.
Gambar 5: Wifi Trilateration
2) Wifi Fingerprinting
Apabila metode trilaterasi menghitung jarak antara pengamat dan beberapa router untuk menentukan jarak dan perpotongan lingkaran, maka wifi fingerprinting menggunakan fungsi jarak antara pengamat dan router, kemudian menyimpannya dalam suatu sistem basisdata untuk digunakan ketika pengamat melewati daerah yang sama. Perbedaan yang substansial antara metode trilateration dan fingerprinting adalah jumlah router yang digunakan. Pada metode trilateration, setidaknya 3 buah router diperlukan untuk menentukan posisi pengamat menggunakan fungsi trilaterasi, sedangkan metode fingerprinting dapat dilakukan hanya dengan menggunakan satu buah router.
7
Gambar 6: Metode Wifi Fingerprinting
Metode wifi fingerprinting memetakan kekuatan sinyal wifi pada suatu bangunan. Untuk itu, perlu dilakukan training terlebih dahulu agar data kekuatan sinyal pada seluruh bangunan tersebut diketahui sehingga ketika pengamat melewati daerah tersebut kembali, estimasi posisi pengamat dapat diketahui dengan membandingkan kekuatan sinyal yang diamati dengan basisdata yang telah diperoleh melalui training.
Wifi fingerprinting menghasilkan akurasi yang lebih rendah dibandingkan metode wifi trilateration. Akan tetapi, metode ini memberikan estimasi posisi yang lebih cepat dan dapat digunakan untuk keperluan tertentu yang menuntut penentuan posisi indoor yang tidak terlalu teliti.
3) Inertial Navigation
Inertial navigation merupakan metode navigasi yang menggunakan sensor inersial internal (accelerometer, gyrometer dan gravity sensor). Inertial navigation menggunakan prinsip dead-reckoning untuk menentukan posisi relatif secara simultan dari posisi awal. Metode ini awalnya digunakan secara luas untuk navigasi pesawat, namun dalam perkembangannya digunakan juga dalam penentuan posisi terestris, seperti pada kendaraan maupun pejalan kaki.
8 4) Visual Odometry
Visual odometry merupakan metode navigasi untuk mengestimasi egomotion (posisi, orientasi dan kelajuan) suatu objek melalui metode pengolahan citra. Visual odometry memiliki prinsip dasar yang sama dengan metode inertial navigation, yaitu menghasilkan posisi relatif secara simultan dengan dead-reckoning.
Gambar 8: Metode Visual Odometry
Visual odometry menggunakan metode visual motion tracking dengan melacak pergerakan objek-objek yang direkam oleh kamera (baik stereo maupun monocular camera), kemudian membuat estimasi pergerakan objek berdasarkan pergeseran benda-benda disekitarnya. Metode ini sangat bergantung pada analisis citra untuk mengidentifikasi titik dan melakukan pemantauan gerakan titik tersebut (optical flow) sehingga secara terus-menerus dapat ditentukan posisi relatif objek yang dicari tersebut.
Pada prakteknya, metode navigasi tersebut tidak digunakan secara terpisah, akan tetapi seringkali dikombinasikan untuk memperoleh posisi yang akurat pada berbagai kondisi. Misalnya sistem navigasi yang menggabungkan sistem satelit, inersial dan indoor positioning untuk menentukan posisi objek di dalam dan di luar ruangan sekaligus.
IV. Mengapa Navigasi Diperlukan?
Navigasi merupakan salah satu komponen penting dalam perkembangan teknologi modern. Dengan perkembangan moda transportasi yang beragam, diperlukan suatu sistem yang dapat memberikan posisi secara realtime. Sebagai contoh, sistem navigasi diperlukan untuk keperluan monitoring traffic udara pada dunia penerbangan. Tanpa adanya sistem navigasi secara teliti dan realtime, maka akan terjadi kekacauan pada traffic penerbangan sehingga dapat menyebabkan kecelakaan atau kejadian lain yang tidak diharapkan.
9
Gambar 9: Navigasi untuk monitoring pesawat secara realtime
V. Aplikasi Navigasi
Sistem navigasi satelit GPS mampu menyediakan data secara realtime setiap waktunya, sehinga memudahkan estimasi posisi, kecepatan, dan juga attitude benda bergerak. Tantangan pada penentuan posisi benda bergerak dengan GPS adalah penentuan ambiguitas fase secara on-thr-fly , yaitu penentuan ambigutias fase pada saat receiver sedang bergerak dalam waktu sesingkat mungkin. Penerapan navigasi dengan sensor GPS telah banyak ditemui, di darat, di laut, maupun di udara hingga keluar angkasa.
a. Aplikasi navigasi pada perhubungan udara
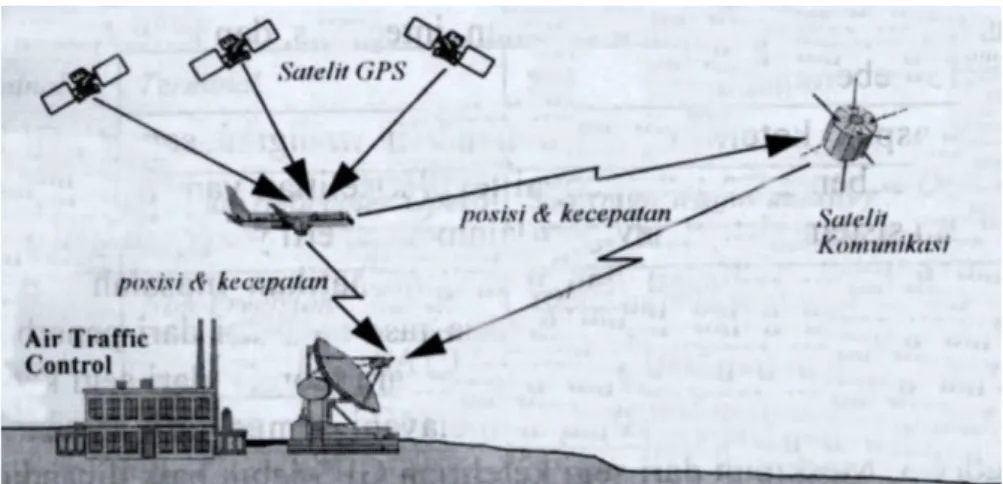
Pada penentuan posisi pesawat di udara, khususnya pada fase-fase navigasi pesawat mulai dari en-route/terminal (oceanic, domestic, terminal, remote areas, special helicopter operations) dan approach and landing (non-precision & precision). Kemudian memberikan informasi posisi 3 Dimensi pesawat (termasuk parameter tinggi) dari waktu ke waktu secara teliti, GPS juga dapat digunakan untuk memberikan informasi tentang kecepatan, arah terbang, serta attitude (roll, pith, and yaw) dari pesawat yang bersangkutan. Penggunaan GPS dalam perhubungan udara tidak hanya mempengaruhi system kokpit, tapi juga system ATC (Air Traffic Control) dan ground base system. Pelacakan pesawat pun bisa dilakukan dengan adanya penentuan posisi GPS dan waktunya. Gambaran system navigasi pada aplikasi perhubungan udara sebagai berikut :
10
Gambar 10: Sistem navigasi pada perhubungan udara
b. Aplikasi navigasi pada perhubungan laut
Pada perhubungan laut, GPS pun telat dimanfaatkan untuk banyak keperluan yang terkait kelautan. Pada dasarnya suatu proses navigasi di laut bertujuan memandu pergerakan suatu wahana laut secara benar, efektif, dan efisien, sehingga wahana laut tersebut dapat selamat tiba di tempat tujuan ataupun mampu selesai mengemban tugas. Pada navigasi kapal di lautan, bisa memakai metode absolut kinematic positioning (ketelitian rendah : 5-10 m) maupun memakai metode DGPS dengan data pseudorange (ketelitian menengah : 1-3 m). Berikut gambaran navigasi ketelitian menengah.
Gambar 11: Aplikasi navigasi pada kapal laut (Abidin, 2007)
Berikut ada beberapa dampak penggunaan GPS ketika dikombinasikan dengan peta navigasi laut, antara lain (Abidin, 1995):
- Penggunaan GPS dapat digunakan untuk memperkecil jarak minimum yang diperlukan antara dua alur pelayaran kapal.
- Dengan memanfaatkan GPS yang dapat memberikan informasi yang relative teliti, jarak minimum yang harus dijaga terhadap sumber bahaya pelayaran dapat diperkecil, sehingga kapal dapat berlayar melalui jalur-jalur pelayaran sulit yang sebelumnya bisa dihindari. Pada kasus tertentu dapat memperpendek jalur pelayaran dan penghematan bahan bakar. Disamping itu larangan terhadap kapal-kapal yang dilarang masuk ke dalam suatu pelabuhan
11 karena keterbatasan maneuver yang dapat dilakukannya juga bisa ditiadakan seandainya kapal tersebut dilengkapi oleh GPS.
- Pengunaan GPS sebagai system navigasi untuk tahap harbor approach and harbor dapat meningkatkan kapasitas perapatan kapal di banyak pelabuhan disamping juga dapat meningkatkan faktor keamanannya
- Karena GPS memberikan pelayanan dengan cakupan wilayah yang global, maka penggunaan GPS memberikan penggunaan wilayah perairan yang lebih fleksibel bagi pelayaran, penentuan rute pelayaran yang lebih bervariasi, dan juga membuka kemungkinan pembukaan pelabuhan-pelabuhan baru di tempat-tempat terpencil sekalipun.
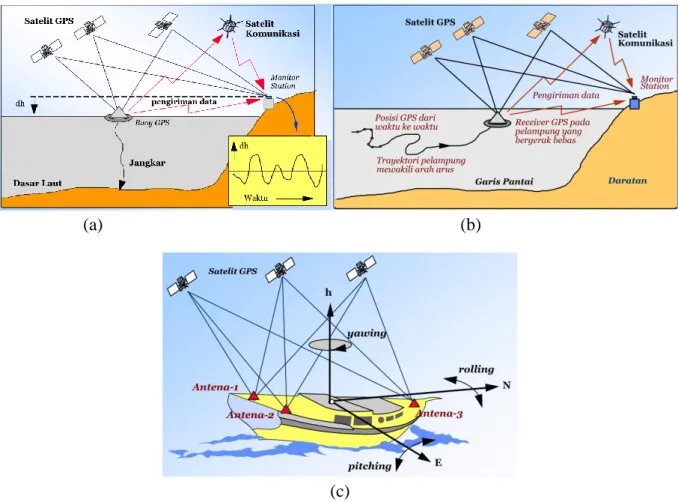
Dalam keperluan ilmiah di wilayah laut, GPS juga cukup berperan, antara lain dalam penentuan posisi titik perum pada survey hidrografi, pengamatan pasang-surut di lepas pantai, studi pola arus, dan penentuan attitude kapal.
(a) (b)
(c)
Gambar 12: (a) Pengamatan Pasut di lepas pantai dengan GPS, (b) Studi pola arus dengan GPS, dan (c) penentuan attitude kapal dengan data GPS
c. Aplikasi navigasi pada perhubungan udara
Pada perhubungan darat, system navigasi juga berguna dalam mengendalikan lalu lintas kendaraan dengan menginstal suatu system untuk memberikan komunikasi informasi lalu lintas pada kendaraan dengan mengirimkan suatu data posisi kendaraan kepada sebuah system pengontrol. Sistem ini telah banyak dikembangkan di Amerika Utara, dan termasuk paling
12 banyak dipakai disana dari beberapa system navigasi kendaraan di darat lainnya. Sistem ini disebut dengan fleet management ITS Navigation System. ITS adalah singkatan dari Intelligent Transportation System. Dalam system ini kendaraan yang bersangkutan dilengkapi dengan system penentuan posisi, dan umumnya dilengkapi dengan system peta elektronik. Kendaraan tersebut melaporkan posisinya ke pusat pengontrol, sehingga pusat pengontrol mudah dalam mengontrol mengelola pergerakan dari kendaraan tersebut. Disamping memberikan instruksi-instruksi serta pengarahan, pusat pengontrol juga bertanggung jawab dalam memberikan informasi lainnya yang diperlukan oleh pengguna kendaraan yakni tentang cuaca dan keadaan lalu lintas.
VI. Referensi
Abidin, H.Z., 1995, Penentuan posisi dengan GPS dan Aplikasinya. PT. Pradnya Paramita, Jakarta
Abidin, H.Z., 2007, Lecture Slide of GD. 3211 Satellite Surveying. Geodesy &Geomatics Engineering Department, ITB, Bandung.
Farrel, J.A., 2008, Aided Navigation: GPS with High Rate Sensors. McGraw-Hill Companies, New York