3. Metode Titik Kontrol Horisontal
Dalam pekerjaan survei hidrografi di lapangan, survei topografi juga perlu dilakukan
untuk menentukan kerangka kawasan pantai secara geografis. Dimana survey topografi ini
dimulai sebelum melakukan survei hidrografi di laut. Tujuan utama adanya survey
topografi ini adalah untuk menentukan koordinat titik kontrol di darat yang biasanya
dilakukan dengan survei geodetik. Titik-titik yang telah disurvei dan dibentuk menjadi
jaring kontrol dianggap sebagai titik kontrol utama yang kemudian digunakan sebagai
referensi atau datum. Penentuan posisi titik kontrol horizontal dapat dilakukan dengan
beberapa metode diantaranya :
a. metode survei klasik (berdasarkan pengamatan astronomis dan pengamatan sudut
dan jarak)
b. metode survei gabungan
c. metode survei fotogrammetri
Ketiga metode tersebut akan dibahas lebih lanjut pada subbab ini
3.1. Metode Survei Klasik 3.1.1. Triangulasi
Pada dasarnya pengukuran triangulasi dilakukan dengan pengukuran sudut yang
membentuk jaring-jaring segitiga dimana setiap jaring segitiga paling tidak memilki
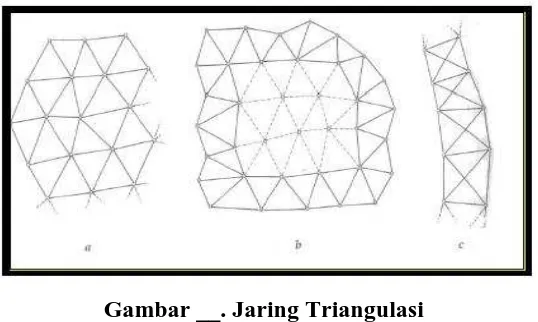
satu sisi common side. Dalam perkembangannya metode dibuat dengan membentuk jaring berupa segitiga-segitiga yang saling berurutan seperti yang terlihat pada gambar
berikut
Gambar __. Jaring Triangulasi
Metode pengukuran menggunakan jaring triangulasi biasanya digunakan untuk
prnrntuan titik kontrol horizontal dengan area over long distance. Tahapan pengukuran yang dilakukan adalah dengan mengukur semua sudut-sudut pada jaring triangulasi
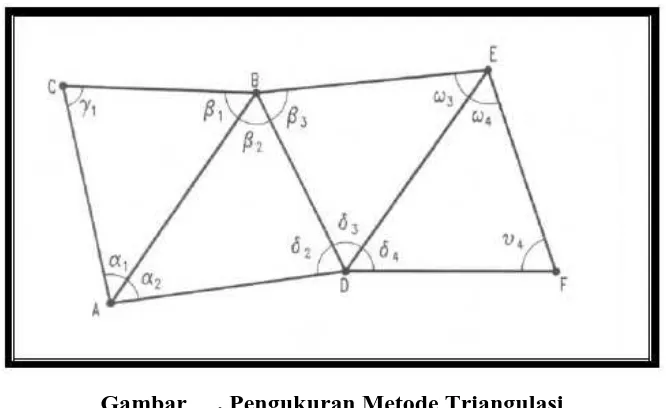
bawah ini, pengukuran yang dilakukan adalah dengan mengukur sudut 1, 1, 1
sebagai sebagai jaring segitiga ABC kemudian pengukuran sudut 2, 2, 2 sebagai
jaring segitiga ABD dan seterusnya. Tujuan dari pengukuran ini adalah untuk
menentukan koordinat titik kontrol A,B,C,D,E, dan F. Setiap segitiga pada
masing-masing jaring triangulasi juga perlu untuk dilakukan koreksi sudut untuk mengetahui
kesalahan pengukuran sehingga dapat diketahui pula toleransi dan tingkat presisi dari
pengukuran tersebut.
Gambar __. Pengukuran Metode Triangulasi
Selain dilakukan perhitungan kesalahan dan toleransi, pada pengukuran triangulasi ini juga perlu dilakukan perhitungan perataan jaring triangulasi dengan metode least quares untuk memberikan koreksi dan meminimalkan kesalahan pada pengukuran.
3.1.2. Trilaterasi
Metode trilaterasi pada dasarnya hampir sama dengan metode triangulasi dimana
penentuan koordinat untuk masing-masing titik kontrol dilakukan berdasarkan
perhitungan dari titik kontrol yang saling berhubungan dan membentuk jaring-jaring
segitiga dengan diketahui salah satu baseline / common side namun yang diukur bukan sudut melainkan jarak antar masing-masing titik kontrol. Untuk memastikan hasil
pengukuran dengan metode triaterasi ini dapat dilakukan dengan memeriksa
jaring-jaring segitiga yang berdekatan setelah menghitung sudut dari sisi-sisi yang diukur.
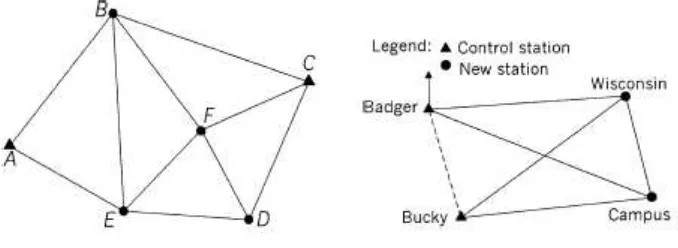
Sama dengan pengukuran triangulasi pada pengukuran trilaterasi ini juga perlu
Gambar __. Contoh Jaring Trilaterasi
3.2. Metode Survei Gabungan
Metode survey gabungan ini merupakan kombinasi dari pengukuran sudut (triangulasi),
dan pengukuran jarak (trilaterasi) dimana kedua metode tersebut memiliki tingkat bobot
yang berbeda. Masing-masing bobot untuk kedua pengukuran dihitung dari satu per
proporsional variance dari pengukuran. Ada beberapa metode yang dapat diterapkan pada survei gabungan yang akan dijelaskan pada sub bab ini.
3.2.1. Poligon
Metode polygon dilakukan dengan mengukur sudut dan jarak dari antar titik-titik
kontrol yang membentuk jaring berbentuk poligon. Sebaiknya titik-titik kontrol
pengukuran dengan metode polygon ini dapat dijangkau dan dapat saling terlihat antar
titik-titik yang berdekatan. Pada metode polygon ini dapat berupa poligo terbuka
maupun polygon tertutup. Biasanya pengukuran dilakukan searah jarum jam. Koreksi
yang dilakukan berdasarkan koreksi sudut dan jarak dengan ketelitian tertentu.
3.2.2. Iso-Determined
Iso-determined atau polygon terbuka tidak terikat sempurna merupakan salah satu bentuk polygon terbuka dimana jumlah pengukuran sama dengan jumlah titik yang tidak diketahui. Jika „n‟ adalah jumlah yang akan dicari koordinatnya maka jumlah pengukuran yang dilakukan (m) sama dengan 2n – 3 atau :
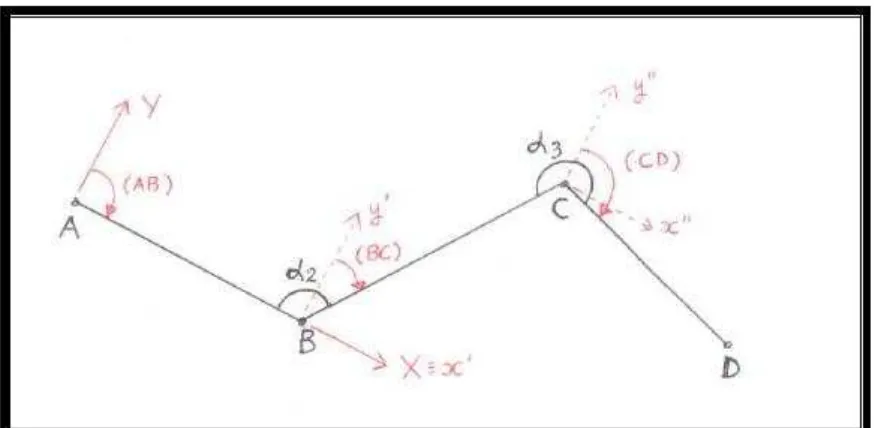
Gambar __. Poligon Terbuka Tidak Terikat Sempurna Tahapan perhitungan yang dilakukan adalah sebagai berikut :
a. Menghitung azimuth masing-masing arah dari titik-titik kontrol dimana azimuth AB
sudah diketahui sehingga menghitung azimuth BC dengan rumus : = + 180 °+ 2−360°
b. Menghitung final coordinate dengan asumsi XA = 0 dan YA = 0 maka rumus yang digunakan adalah sebagai berikut :
= + .�� ; = + .�� ( )
= + . ; = + . ( )
Hal penting yang perlu ditekankan adalah jumlah pengukuran yang dilakukan (sudut 1 2
dan jarak AB,BC, dan CD sama dengan jumlah koordinat yang dicari.
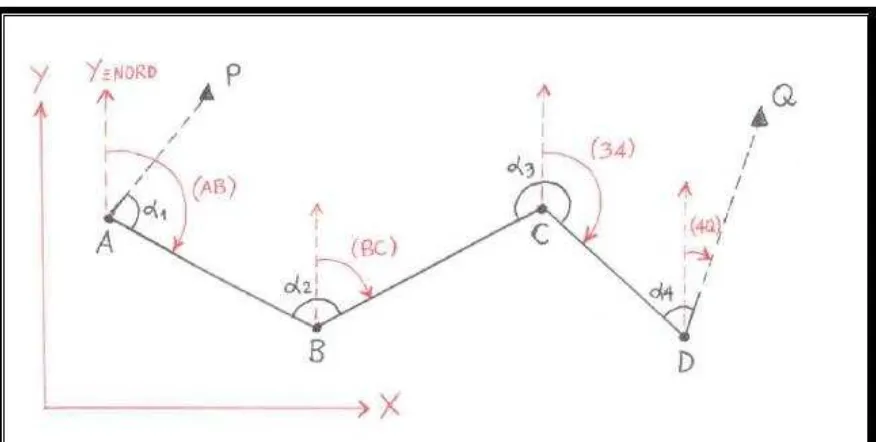
3.2.3. Over-Determined
Gambar __. Poligon Terbuka Terikat Sempurna Tahap perhitungan yang dilakukan akan dijelaskan sebagai berikut :
a. Menghitung azimuth masing-masing titik kontrol dengan rumus :
= � � −
− ; = � �
− − Untuk unadjustedazimuth DQ /(DQ)‟ rumusnya :
′= + 4 ± 180°
b. Melakukan pengecekan terhadap azimuth DQ dapat dilakukan dengan kondisi ideal:
′− = 0
Rumus tersebut untuk melakukan pengecekan, dan kemungkinan besar tidak sama
dengan nol karena itu pengecekan ini dilakukan untuk mengetahui kesalahan penutup sudut (Δ) sehingga rumusnya menjadi :
′− = Δ
� � � Δ lebih kecil dari toleransi sudut.
c. Menghitung hasil perataan azimuth dengan rumus : = ′− − ′−2 = ′−3
= ′−4
d. Menghitung kesalahan linear penutup absis dan kesalahan linear penutup ordinat
dengan rumus :
� = � ′− ( − ) � = � ′− ( − ) Sehingga ΔL :
��= � 2+� ²
e. Menghitung partially adjusted coordinates :
2 1 = ′2 1 − � ; 2 1 = ′2 1 − �
3 2 = ′3 2 − � ; 3 2 = ′3 2 − �
4 3 = ′4 3 − � ; 4 3 = ′4 3 − �
Dimana � � � adalah nilai dari “unitary linear errors of closing”
f. Menghitung koordinat fix titik-titik kontrol dengan rumus :
= + ; = + ( )
dimana
= .�� ; ( ) = .
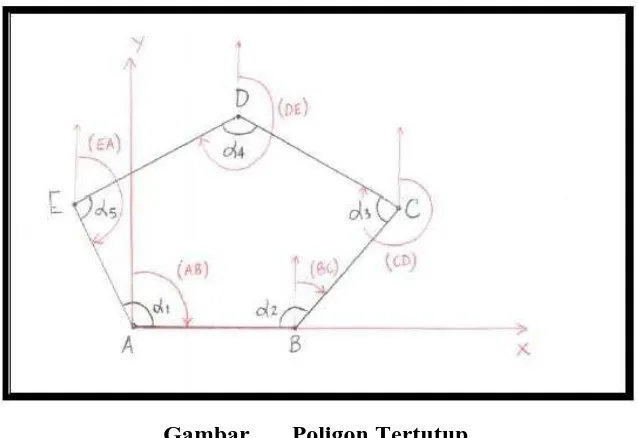
3.2.4. Not Oriented Closed Traverse
Gambar __. Poligon Tertutup
Tahapan Perhitungan yang dilakukan akan dijelaskan sebagai berikut :
a. Menghitung kesalahan penutup sudut (Δ) dengan „n‟ sudut yang diukur dan Σ‟
b. Menghitung Azimuth
c. Menghitung unadjusted partial coordinates
d. Menghitung kesalahan absis (ΔX) dan kesalahan ordinat (ΔY) yang kemudian digunakan untuk menghitung ΔL dimana :
ΔL = � 2+� ²
e. Menghitung koordiat fix dari masing-masing titik sama seperti rumus umum
menghitung koordinat.
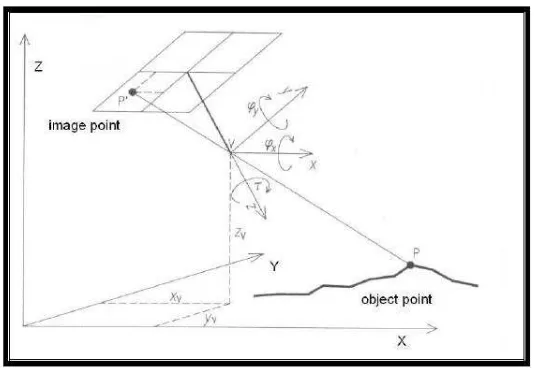
3.3. Metode Survei Fotogrammetri
Metode fotogrametri biasanya digunakan untuk survey dengan objek yang memiliki
cakupan area yang luas. Dalam survey fotogrammetri ada tiga hal yang saling berkaitan
yaitu :
a. Koordinat tiga dimensi (X,Y,Z) dari objek
b. Posisi horizontal (x,y) pada objek foto udara
c. Keseluruhan parameter-parameter orientasi yang digunakan untuk menentukan
posisi kamera pada saat dilakukan pemotretan.
Secara umum tahapan yang dilakukan pertama adalah dengan mengetahui koordinat
tanah yang sebenarnya (real coordinates) dan koordinat horizontal titik-titik yang diketahui pada foto udara. Selanjutnya dari hasil tersebut dapat dihitung
parameter-parameter orientasi. Setelah menghitung parameter-parameter dapat dilakukan tahapan restitusi foto
udara yang memungkinkan kita untuk mengetahui semua koordinat horizontal objek
pada foto udara.
3.3.1. Aerophotogrammetry
Prinsip dasarnya sama dengan fotogrametri pada umumnya. Metode ini biasanya
digunakan untuk menentukan topographical charts dengan cakupan area yang luas dimana apabila dilakukan dengan cara konvensional membutuhkan waktu selama
beberapa tahun. Foto udara yang dihasilkan dari survey fotogrammetri ini untuk
selanjutnya digunakan untuk menghitung koordinat titik-titik kontrol dengan syarat
overlap foto udara minimal 60 %. Syarat tersebut merupakan syarat utama dalam melakukan restitusi foto udara. Berdasarkan perkembangannya terdapat tiga jenis
restitusi foto udara yaitu :
Melakukan rekonstruksi secara dimensional dengan menggunakan alat stereoscope dimana restitusi ini mengandalkan kemampuan pengelihatan secara visual antara
dua foto yang bertampalan. Hasil dari restitusi ini adalah memodelkan (stereo model) dari hasil penglihatan stereoscopic.
b. Restitusi analog
Restitusi analog merupakan ground model untuk melakukan rekonstruksi secara
optic-mechanic dari hasil survei fotogrammetri. Proses yang dilakukan pada restitusi
analog adalah dengan mengetahui dan menghitung parameter-parameter orientasi
yang dibutuhkan dalam proses restitusi foto udara. Parameter-parameter tersebut
adalah parameter orientasi dalam (interior orientation) dan parameter orientasi luar
(exterior orientation) :
Parameter orientasi dalam merupakan faktor-faktor interior berdasarkan
pada faktor-faktor rekonstruksi berkas sinar dari kamera seperti focus
kamera terkalibrasi, principal point terkalibrasi, nodal point dimana
keseluruhan faktor orientasi dalam tersebut merupakan faktor-faktor yang
berasal dari kamera yang digunakan.
Parameter orientasi luar merupakan faktor-faktor exterior yang berkaitan
dengan spatial position yang terdiri dari 12 parameter yaitu 6 parameter
orientasi relatif dan 6 parameter orientasi absolut dimana keduabelas
parameter tersebut terdiri dari tiga koordinat relative serta tiga parameter
orientasi dari foto udara stereomodel sedangkan 6 parameter orientasi
absolute adalah mendefinisikan posisi dari hasil orientasi relative ke dalam
sistem koordinat yang bereferensi enam parameter tersebut adalah koordinat
X, Y, Z dan 3 parameter rotas� ω,θ,κ ome�a, p��, kappa yan� merupakan
faktor rotasi terhadap sumbu x, sumbu y, dan sumbu z.
c. Restitusi analyctical
Pada prinsipnya sama dengan restitusi fotogrametrik dan restitusi analog
perbedaanya terletak pada proses perhitungannya karena metode restitusi secara
analitik ini komputasi atau proses perhitungannya dilakukan secara automatic calculation.
3.3.2. Fotogrametri digital
Metode fotogrametri tradisional pada dasarnya menggunakan gabungan prinsip
stereoscopic baik itu dengan metode analog maupun analyctical. Dimana proses restitusi dilakukan dengan mengandalkan kemampuan pengelihatan secara
stereoskopik dan bantuan perhitungan secara analyctical. Pada metode fotogrametri digital semua proses dikerjakan secara digital baik input data, proses perhitungan sampai dengan tahapan output dilakukan dengan secara digital.
3.3.3. Aerial Triangulation
Metode triangulasi udara dilakukan untuk menentukan koordinat titik-titik kontrol
dengan membuat independent model. Dimana independent model tersebutmerupakan orientasi relative dari masing-masing model (2 foto udara yang bertampalan) saling
berhubungan (tie points) dengan hasil berupa single blocks.
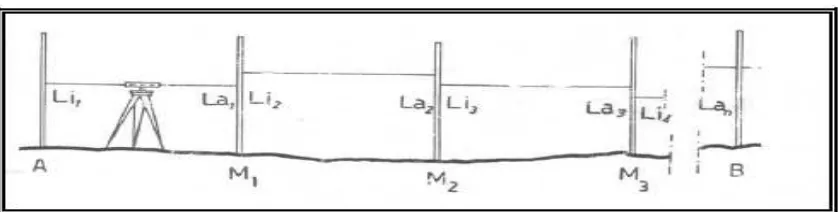
4. Metode Titik Kontrol Vertikal 4.1. Metode Geometric Leveling
Prinsipnya merupakan pengukuran terhadap perbedaan tinggi orthometric (geoid elevations) diantara kedua titik yang diukur atau diukur berdasarkan perbedaan ketinggian. Tujuan utama dari metode ini adalah menghitung perbedaan ketinggian
antara titik-titik kontrol. Pengukuran jarak secara langsung juga dilakukan dalam metode
ini
Sumber kesalahan pada metode ini berasal dari kelahan kolimasi dan kesalahan
pembacaan benang pada rambu ukur. Prinsip perhitungannya sama dengan perhitungan
kerangka kontrol vertical dimana bentuk kerangkanya berupa polygon. Metode
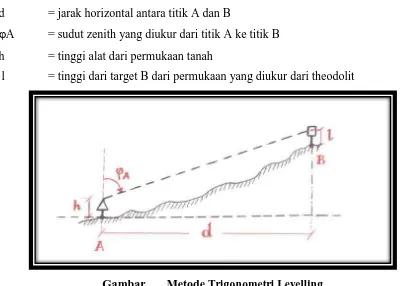
geometric leveling merupakan metode yang umum digunakan dalam metode levelling. 4.2. Metode Trigonometri Levelling
Metode ini pada dasarnya menggunakan pengukuran sudut zenith dengan menggunakan
theodolit. Biasanya digunakan untuk penentuan posisi ketinggian dalam metode
triangulasi. Rumus yang digunakan untuk menghitung perbedaan tinggi (ΔAB) antar dua titik adalah sebagai berikut :
� = d. cot A + h – l Dimana :
d = jarak horizontal antara titik A dan B
A = sudut zenith yang diukur dari titik A ke titik B h = tinggi alat dari permukaan tanah
l = tinggi dari target B dari permukaan yang diukur dari theodolit
Gambar __. Metode Trigonometri Levelling
Ada beberapa metode koreksi pada trigonometri leveling ini diantaranya koreksi
sphericity, koreksi refraksi, koreksi elevasi.
4.3. Metode Altimetri dengan GPS (Metode Kontrol Vertikal GNSS)
Penentuan posisi relative dengan menggunakan GPS menghasilkan koordinat geosentris
berupa koordinat XYZ berdasarkan referensi ellipsoid WGS 84. Dalam kaidah
kartografi tinggi orthometric (H) merupakan elevasi yang diukur dari referensi geoid
perlu untuk mengetahui perbedaan ketinggian antar keduanya atau undulasi dari geoid (N). Dari perbedaan referensi tersebut perlu dilakaukan transformasi „locating of the geoid‟ dimana :
��=������− ��� ��� ��