Makalah dipresentasikan dalam Seminar Nasional Matematika dan Pendidikan Matematika
T-15
ANALISA KESTABILAN PERSAMAAN GERAK ROKET TIGA
DIMENSI TIPE RKX-LAPAN
Subchan1, Rifa’i, M2., Apriliani, E3.
1,2,3
Institut Teknologi Sepuluh Nopember Surabaya
1
[email protected] Abstrak
Pada paper ini dibahas roket kendali dengan enam derajat kebebasan yang terdiri dari tiga gerak translasi dan tiga gerak rotasi. Persamaan gerak roket merupakan model persamaan nonlinear. Desain sistem kendali diawali dengan melakukan linierisasi. Selanjutnya hasil linierisasi dianalisa kestabilannya dengan menggunakan kestabilan Ruth-Hurwitz. Uji kestabilan sistem dilakukan dengan berbagai output serta mengambil data parameter terbang pada roket tipe RKX-LAPAN yang dianalisa dari beberapa kondisi kecepatan. Hasil dari penelitian diketahui bahwa sistem persamaan gerak roket pada kecepatan mach 0.2, mach 0.5, mach 1.0 dikatakan stabil. Sedangkan pada analisa kecepatan diatas mach 1.0 diketahui bahwa sistem persamaan gerak roket tidak stabil. Kata kunci: kriteria kestabilan Routh-Hurwitz, roket kendali
PENDAHULUAN
Roket kendali merupakan wahana terbang yang dapat digunakan pada berbagai misi tertentu, misalnya untuk kepentingan ilmiah dan pertahanan keamanan suatu negara. Roket kendali yang dibahas adalah roket RKX-LAPAN. Roket ini didesain dengan menggunakan dua stage (fase), yaitu boosting dan sustaining. Fase boosting adalah fase yang dimulai sejak awal peluncuran roket sampai ketinggian tertentu. Setelah itu roket mengalami separasi (pemisahan) dan motor roket akan dinyalakan. Pada saat motor roket menyala fase inilah yang dinamakan fase sustaining. Dalam fase sustaining, roket akan dikendalikan untuk mencapai target atau sasaran tertentu (Fitria,2010). Pada roket kendali terdapat gaya dorong, sistem penargetan, dan sistem pengendalian. Sistem kendali roket dapat bekerja dengan baik, apabila semua subsistem mampu bersinergi secara maksimal. Sehingga mampu mencapai hasil yang diharapkan.
Secara umum, roket memiliki enam derajat kebebasan gerak (six freedom of degree) yang terdiri dari tiga gerak translasi dan tiga gerak rotasi. Sehingga memungkinkan roket bergerak tidak stabil. Untuk itu, diperlukan sistem gerak roket yang stabil. Sistem gerak roket merupakan persamaan nonlinear tiga dimensi yang rumit dan kompleks. Dalam analisa lebih lanjut diperlukan proses hampiran persamaan nonlinear dengan bentuk linear yaitu proses linearisasi persamaan gerak roket terdiri dari dua bagian, yaitu gerak longitudinal dan gerak lateral-directional (Nelson,R, 1998).Pada gerak longitudinal ini terdapat dua gerak translasi dan satu gerak rotasi. Sedangkan pada gerak lateral directional terdapat dua gerak rotasi dan satu gerak translasi. Gerakan roket ini
ditentukan oleh sirip (aktuator) yang berada pada tail (ekor roket), meliputi elevator, rudder dan aileron. Sirip-sirip inilah yang nantinya mengontrol pergerakan roket.
Pada paper ini dibahas tentang linearisasi persamaan nonlinear gerak roket serta analisa kestabilan sistem pada fase sustaining menggunakan kriteria kestabilan Routh-Hurwitz. Kemudian dilakukan uji kestabilan dari sistem persamaan gerak roket. Parameter yang digunakan dalam uji kestabilan ini, adalah parameter roket RKX-LAPAN yang dianalisa pada kondisi kecepatan terbang yang bervariasi.
PEMBAHASAN
A. Geometri Roket RKX-LAPAN
RKX-LAPAN ini merupakan salah satu roket yang disiapkan untuk menjadi guided missile (peluru kendali). Roket RKX-LAPAN mempunyai empat tail fin, yang masing-masing terdiri dari dua tail fin vertikal dan horizontal yang berfungsi sebagai sirip kendali (Husnul, dkk, 2010). Sirip kendali roket ada tiga jenis, yaitu elevator, rudder dan
aileron. Kontrol elevator merupakan kontrol yang mengatur gerakan naik turun hidung roket. Tail yang bekerja pada kontorl elevator adalah tail fin horizontal. Kontrol rudder
merupakan kontrol yang dapat membelokkan hidung roket ke kanan dan ke kiri. Tail
yang bekerja pada kontrol rudder adalah tail fin vertikal. Sedangkan kontrol aileron
merupakan kontrol yang mengatur gerak roll (memutar) roket.
B. Model Persamaan Gerak Roket
Persamaan gerak roket merupakan model persamaan nonlinear. Jika diasumsikan roket sebagai benda tegar, maka roket mempunyai enam derajat kebebasan. Berdasarkan hukum kedua Newton, persamaan gerak roket dapat dibagi menjadi dua, yaitu persamaan gaya dan persamaan momen.
) (mV dt d m F (1) ) (H dt d (2) Kemudian dengan mentransformasi persamaan gaya dan momen dalam acuan koordinat sumbu bumi, persamaan gerak roket secara umum dapat dituliskan sebagai berikut ) cos cos ( ) sin cos ( ) sin ( g uq vp w m F g pw ur v m F vr qw u m F z y x (3) qr I I I pq p I r I N I I pr r p I q I M I I qr pq r I p I L xz xx yy xz zz zz xx xz yy yy zz xz xx ) ( ) ( ) ( ) ( ) ( 2 2 (4)
Untuk menyelesaian persamaan (3) dan (4) diperlukan persamaan kecepatan anguler yang ditransformasi dari koordinat sumbu bumi ke koordinat sumbu badan.
φ θ ψ φ θ r φ θ ψ φ θ q θ ψ φ p cos cos sin sin cos cos sin (5) C. Lineariasi
Persamaan nonlinear gerak roket termasuk persamaan yang rumit, sehingga perlu dilakukan penyederhanaan untuk kepentingan analisa. Dalam hal ini, persamaan
nonlinear akan dilinearisasi menggunakan teori gangguan kecil dititik kesetimbangannya. Teori gangguan kecil ini mengasumsikan bahwa gerak roket terdiri dari pergeseran kecil dari kondisi terbang stabil. Dengan kata lain, semua variabel dari persamaan gerak roket diganti dengan nilai kesetimbangan ditambah dengan gangguan.
Ketika gangguan dari kondisi rata-rata dianggap sangat kecil, maka berlaku sebagai berikut :
a.perkalian (product) antar gangguan dianggap nol.
b.sinus dari sudut gangguan dianggap sama dengan sudut gangguan, sedangkan cosinus dari sudut gangguan dianggap sama dengan satu.
Sehingga persamaan (3)-(5) berubah menjadi :
] 0 0 0 0 0 cos [ m u w q q w v r r v g x F ] sin sin sin 0 cos 0 cos [ 0 0 0 0 0 0 r r u w p p w g g θ φ Δθ u v m y F ] cos sin sin cos [ 0 0 0 0 0 0 0 0 p p v u q q u g θ φ φ g θ φ θ v w m z F (6) ) ( ) )( (q0 r r0 q I I I p0 q q0 p r I p I L xx xz zz yy xz ) ( 2 ) )( (p0 r r0 p I I I p0 p r0 r q I M yy xx zz xz ) ( ) )( ( 0 0 0 0 q q p I I I q r r q p p I r I N zz xz yy xx xz (7) 0 0 sin cos p ) sin sin cos (cos sin cos cos sin 0 0 0 0 0 0 0 0 0 0 q ) cos sin sin (cos cos cos sin cos 0 0 0 0 0 0 0 0 0 r (8)
Persamaan (6)-(7) merupakan persamaan gerak roket terlinearisasi dengan menghilangkan persamaan pada kondisi awal setimbang. Pada kasus tertentu perlu dipertimbangkan kondisi penerbangan sederhana, misalnya kondisi terbang lurus (Blacelock,J, 1990). Hal ini mengakibatkan
0 0 0 0 0 0 0 0 0 0 0 v p q r p q r .
Sehingga persamaan (6)-(7) sebagai berikut :
] sin [ ] cos [ ] cos [ 0 0 0 0 0 0 0 g q u w m F g p w r u v m F g q w u m F z y x (9)
p I r I N q I M r I p I L xz zz yy xz xx (10) 0 0 cos sin r q I q p yy (11) Persamaan (9) dan (10) merupakan persamaan gerak untuk perubahan kecil disekitar nilai kesetimbangannya atau disebut persamaan gangguan dari gaya dan momen.
Gangguan dalam analisa gerak roket sangat berpengaruh pada gaya dan momen roket. Gangguan-gangguan ini secara tidak langsung ditransformasi ke dalam bentuk fungsi gangguan sebagai berikut (Fitria,2010).
) , , , , ( ) , , , , ( ) , , , , ( ) , , , , ( ) , , , ( ) , , ( 6 5 4 3 2 1 a r e a r e z r y e x r p v f N q w w u f M r p v f L q w w u f F r p v f F w u f F
Dengan menggunakan ekspansi Deret Taylor maka diperoleh:
e e z F q q z F w w z F w w z F u u z F z F r r y F r r y F p p y F v v y F y F e e x F w w x F u u x F x F a a N r r N r r N p p N v v N N e e M q q M w w M w w M u u M M a a L r r L r r L p p L v v L L
Sehingga diperoleh persamaan differensial orde pertama gerak roket sebagai berikut :
e e xw xu F g F F u cos 0 p w r u r F p F v F v yr yp yv 0 0 r r y F g 0 cos q u q F w F w F u F w zq w z zw zu 0 e e z F g 0 sin (12) r r xx xz r p v I r L I r L p L v L p a a L e e q w w u u M w M w M q M M q r r zz xz r p v I p N I r N p N v N r a N a
(13) Kemudian, dari hasil data terbang aerodinamika, tidak semua parameter terbang berpengaruh signifikan. Parameter yang diabaikan adalah Fzq,Fzw,Fyp,Fyr
(Donald,M.D,1990).
Dengan menggunakan sumbu kestabilan (keseimbangan) roket, w0dapat dianggap
nol. Sedangkan 0 sama dengan sudut jalur terbang 0 jika sudut serang 0 diasumsikan
nol, Maka persamaan gerak roket menjadi berikut :
e e x xw xu u F w g F F u 0 0 u F u g r F r r y yv e e z zw zu u F w u q F F w 0 a a r r p p L r L r L L L p e e z F w M e M q u M M w F M M u F M M q w q zw w w zu w u ( ) ( ) ( ) ( ) 0 a a r r N N r N p N N r (14) dengan : q p
D. Matriks State Space
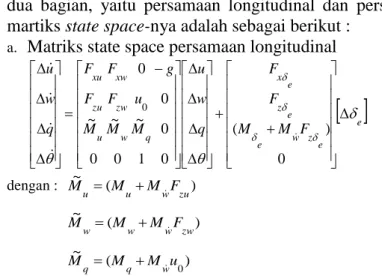
Persamaan (14) dapat dibentuk menjadi matriks state space yang dibagi menjadi dua bagian, yaitu persamaan longitudinal dan persamaan lateral-directional. Adapun martiks state space-nya adalah sebagai berikut :
a. Matriks state space persamaan longitudinal
e e z w e e z e x q w zw xw u zu xu F M M F F q w u g M u M F F M F F q w u 0 ) ( 0 0 0 1 ~ 0 0 ~ 0 ~ 0 dengan : ~ ( ) zu w u u M M F M ~ ( ) zw w w w M M F M ~ ( ) 0 u M M M w q q Dari matriks state space diatas, terlihat bahwa variabel keadaannya terdiri dari kecepatan linear u danw, laju sudut angguk q, dan sudut angguk . Masukan (kendali) dari sistem tersebut adalah defleksi sirip elevator
e
. Sedangkan hasil yang diharapkan adalah sebagai berikut :
Tabel 1. Hasil persamaan longitudinal
No Output Matriks Output
1. u
1 0 0 0
2. w
0 1 0 0
4.
0 0 0 1
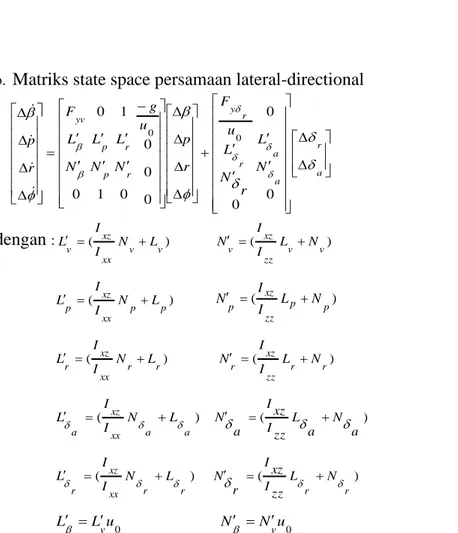
b. Matriks state space persamaan lateral-directional
a r a a r r y r r p p yv N L r N L u F r p u g N L N L N L F r p 0 0 0 0 0 0 0 1 1 0 0 0 0 dengan : ( ) v v xx xz v I N L I L ( ) v v zz xz v I L N I N ( ) p p xx xz p I N L I L ( ) p p zz xz p I L N I N ( ) r r xx xz r I N L I L ( ) r r zz xz r I L N I N ( ) a a xx xz a L N I I L ( ) a N a L zz I xz I a N ) ( r r xx xz r L N I I L ( ) r r N L zz I xz I r N L Lu0 v N Nvu0
Pada matriks state space di atas, terlihat bahwa yang menjadi variabel state adalah
sideslip angles ,laju sudut yawp, laju sudut rollr, serta sudut yaw. Input dari sistem tersebut adalah defleksi sirip rudder
r
dan aileron a.Sedangkan hasil yang diharapkan adalah sebagai berikut :
Tabel 2. Output persamaan lateral-directional
No Output Matriks Output
1.
1 0 0 0
2. p
0 1 0 0
3. r
0 0 1 0
4.
0 0 0 1
E. Analisa Kestabilan Persamaan Gerak Roket
Hal pertama yang harus dilakukan untuk menganalisa kestabilan suatu sistem adalah mencari nilai eigen 𝜆 pada masing-masing persamaan gerak roket.
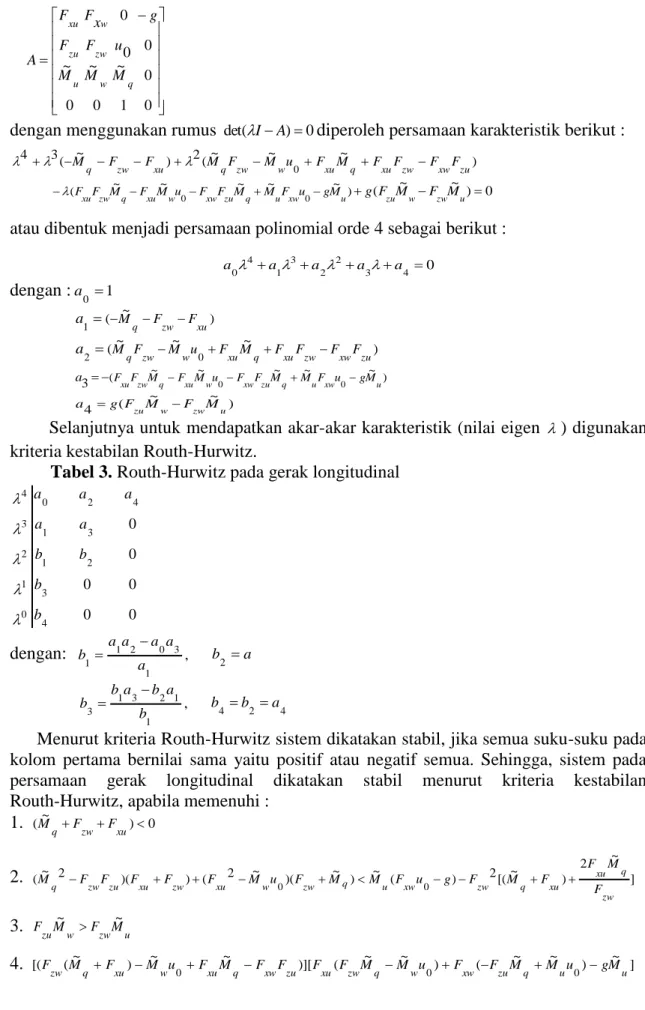
a. Kestabilan pada gerak longitudinal
0 0 0 1 ~0 0 0 ~ 0 ~ g M u M F x F M F F A q w zw w u zu xu
dengan menggunakan rumus det(IA)0diperoleh persamaan karakteristik berikut :
) ~ ~ ~ ( 2 ) ~ ( 3 4 0 xu q xu zw xw zu w zw q xu zw q F F M F M u F M F F F F M 0 ) ~ ~ ( ) ~ ~ ~ ~ ~ ( 0 0 u zw w zu u xw u q zu xw w xu q zw xuF M F M u F F M M F u gM g F M F M F
atau dibentuk menjadi persamaan polinomial orde 4 sebagai berikut :
0 4 3 2 2 3 1 4 0 a a a a a dengan : 1 0 a ( ~ ) 1 Mq Fzw Fxu a (~ ~ ~ ) 0 2 MqFzw Mwu FxuMq FxuFzw FxwFzu a ) ~ ~ ~ ~ ~ ( 0 0 3 FxuFzwMq FxuMwu FxwFzuMq MuFxwu gMu a ) ~ ~ ( 4 g FzuMw FzwMu a
Selanjutnya untuk mendapatkan akar-akar karakteristik (nilai eigen ) digunakan kriteria kestabilan Routh-Hurwitz.
Tabel 3. Routh-Hurwitz pada gerak longitudinal
0 0 0 0 0 0 4 3 2 1 3 1 4 2 0 0 1 2 3 4 b b b b a a a a a dengan: , 1 3 0 2 1 1 a a a a a b a b 2 , 1 1 2 3 1 3 b a b a b b 4 2 4 a b b
Menurut kriteria Routh-Hurwitz sistem dikatakan stabil, jika semua suku-suku pada kolom pertama bernilai sama yaitu positif atau negatif semua. Sehingga, sistem pada persamaan gerak longitudinal dikatakan stabil menurut kriteria kestabilan Routh-Hurwitz, apabila memenuhi :
1. (~ )0 xu zw q F F M 2. ] ~ 2 ) ~ [( 2 ) ( ~ ) ~ )( ~ 2 ( ) )( 2 ~ ( 0 0 zw q xu xu q zw xw u q zw w xu zw xu zu zw q F M F F M F g u F M M F u M F F F F F M 3. FzuM~wFzwM~u 4. [( (~ ) ~ ~ )][ ( ~ ~ ) ( ~ ~ ) ~ ] 0 0 0 xu q xw zu xu zw q w xw zu q u u w xu q zw M F M u F M F F F F M M u F F M M u gM F
) ~ 2 ] ~ ) ~ ~ ( ) ~ ~ ( [ ) ~ )( ~ ~ ( 0 0 xu zw q u u q zu xw w q zw xu xu zw q u zw w zw M F F M g u M M F F u M M F F F F M M F M F g
b. kestabilan pada gerak lateral-directional
Matriks A dari gerak lateral-directional adalah
0 0 0 0 0 1 1 0 0 u g r N r L p N p L β N β L yv F A
diperoleh persamaan karakteristik sebagai berikut :
) ( ) ( 2 3 4 Nr Lp Fyv LpNr LrNp FyvNr FyvLp N ( ) ( ) 0 0 0 r r p p p r yv r p yv u L N L N g L u g N L N L N L F N L F
Dengan menggunakan kriteria kestabilan Routh-Hurwithz seperti dijelaskan pada bagian sebelumnya, sistem persamaan gerak lateral-directional dikatakan stabil apabila memenuhi : 1. ( )0 yv p r L F N 2. ] 2 ) [( 2 ) ( ) )( 2 ( ) )( 2 ( 0 r yv p yv p r p p r r p yv yv r p N F L F L N u g N L L N N N F F N N L 3. LrN LNr 4. [ ( ) ][ ( ) ( ) ] 0 u L N g N L N L N L yv F N N F N L F N L p p p r r p r yv p r yv r p ) ( 2 ] ) ( ) ( [ ) )( ( 0 0 r p yv p p p r r p yv yv p r r r N L F N L u g N L N L N L F F L N N L N L u g
F. Uji Kestabilan Sistem
Uji kestabilan menitikberatkan pada uji titik terbang yang ditentukan. Titik yang dimaksud disini adalah kecepatan roket untuk tipe roket RKX-200 LAPAN.
Kecepatan yang dianalisa antara lain pada mach 0.2, mach 0.5, mach 1.0, mach 1.1 mach 1.3, mach 1.5.
Berikut ini adalah contoh grafik simulasi yang menggambarkan suatu kestabilan atau ketidakstabilan.
Gambar 1. Grafik kecepatan linear sumbu-x pada mach 0.2, mach 0.5, mach 1.0
Gambar 2. Grafik kecepatan linear sumbu-x pada mach 1.1, mach 1.3, mach 1.5
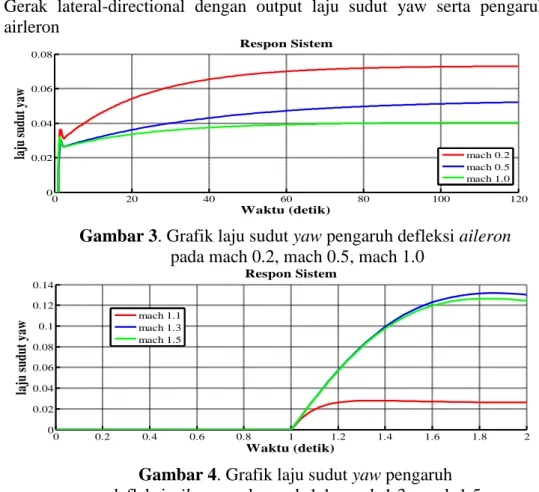
Gerak lateral-directional dengan output laju sudut yaw serta pengaruh defleksi airleron
Gambar 3. Grafik laju sudut yaw pengaruh defleksi aileron
pada mach 0.2, mach 0.5, mach 1.0
Gambar 4. Grafik laju sudut yaw pengaruh defleksi aileron pada mach 1.1, mach 1.3, mach 1.5
0 5 10 15 20 25 30 35 -5 -4 -3 -2 -1 0 Respon Sistem Waktu (detik) Kece pa ta n Li nea r Sum bu-x mach 0.2 mach 0.5 mach 1.0 0 1 2 3 4 5 6 7 8 9 10 -40 -30 -20 -10 0 10 Respon Sistem Waktu (detik) Kece pa ta n Li nea r Sum bu-x mach 1.1 mach 1.3 mach 1.5 0 20 40 60 80 100 120 0 0.02 0.04 0.06 0.08 Respon Sistem Waktu (detik) la ju sudu t y aw mach 0.2 mach 0.5 mach 1.0 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 Respon Sistem Waktu (detik) la ju sudu t ya w mach 1.1mach 1.3 mach 1.5
KESIMPULAN
Dari hasil analisa dan pembahasan dapat disimpulkan bahwa, sistem persamaan gerak roket yang dianalisa pada kecepatan mach 0.2, mach 0.5, mach 1.0 sistem dikatakan stabil. Sedangkan pada kecepatan diatas mach 1.0 sistem dikatakan tidak stabil.
DAFTAR PUSTAKA
Blackelock, J. (1990). Automatic Control of Aircraf and Missiles, USA : Yellow springs. Donald, M.D. (1990). Automatic Flight Control System, New York : Pretince Hall
Internasional (UK).
Fitria, D. (2010). Desain dan Implementasi Pengontrol PI Optimal Pada Gerak Longitudinal Roket RKX-200 LAPAN, Bandung : Tugas Akhir S1 Departemen Teknik Fisika ITB.
Husnul, A.dkk. (2010). Stucture and Mechanic DIV, Bogor : LAPAN