PERHITUNGAN
KARAKTERISTIK
AERODINAMIKA,
ANALISIS
DINAMIKA
DAN
KESTABILAN
GERAK
DUA
DIMENSI
MODUS
LONGITUDINAL
ROKET
RX 250 LAPAN
Singgih Satrio Wibowo Dosen
Program Studi Teknik Aeronautika Jurusan Teknik Mesin Politeknik Negeri Bandung
e-mail: singgih.wibowo@me.polban.ac.id, singgih.wibowo@gmail.com
Abstrak
Dalam penelitian ini dilakukan analisis dinamika dan kestabilan roket RX 250 LAPAN pada modus longitudinal. Parameter aerodinamika yang digunakan dalam analisis diperoleh dengan menggunakan metode Datcom dengan bantuan Digital Datcom. Sedangkan simulasi gerak dilakukan dengan MATLAB. Dalam simulasi gerak ini, gangguan dimodelkan dengan defleksi gaya dorong yang berharga konstan. Dari hasil analisis, dapat disimpulkan bahwa roket ini stabil statik dan stabil dinamik pada modus longitudinalnya selama tidak ada gangguan atau jika gangguan yang terjadi cukup kecil, yaitu untuk defleksi gaya dorong kurang dari tiga derajat. Kata kunci
Kestabilan roket, parameter aerodinamika, Digital Datcom
1
P
ENDAHULUANRoket adalah sejenis sistem propulsi yang dapat membawa bahan bakar dan oksigennya sendiri, yang bekerja dengan prinsip momentum, yaitu dengan memancarkan aliran massa hasil pembakaran propelan. Pancaran aliran massa ini akan menghasilkan gaya dorong dengan arah yang berlawanan.
Prinsip kerja roket yang sederhana ini menjadi alasan banyaknya penggunaan roket sebagai wahana pendorong, misalnya dalam pesawat antariksa (space
shuttle) dan peluru berpandu (guided missile).
Perkembangan teknologi roket berawal sejak abad pertengahan di Asia [1]. Namun teori-teori mengenai penerbangan roket masih sangat sedikit. Teori penerbangan roket mulai muncul pada awal abad ke-20. Teori-teori mengenai roket ini menjadi pendorong pesatnya perkembangan teknologi roket abad ini, baik untuk keperluan sipil maupun militer. Di bidang militer, penggunaan roket sebagai persenjataan dimulai pada masa Perang Dunia II oleh Jerman dengan pembuatan roket V-2 [Ref. 10]. Di bidang sipil, penggunaan roket sebagai wahana peluncur dimulai sejak akhir Perang Dunia II, yang dipelopori oleh dua negara adikuasa saat itu, Rusia dan Amerika Serikat.
Pengembangan teknologi roket terus berlanjut seiring berjalannya waktu. Kini teknologi ini sudah menjadi milik semua bangsa. Saat ini banyak negara yang memiliki lembaga khusus di bidang ini, yang bertujuan melakukan penelitian dan pengembangan roket untuk berbagai keperluan, baik militer maupun sipil.
Indonesia adalah salah satu negara yang memiliki lembaga tersebut. Penelitian dan pengembangan teknologi roket di Indonesia dilakukan oleh Lembaga Penerbangan dan Antariksa Nasional (LAPAN).
LAPAN telah melakukan pengembangan berbagai roket. Salah satunya adalah RX 250. Roket ini dirancang dapat ditembakkan dari darat ke udara dengan tinggi terbang maksimum (apogee) hingga 70 km [14]. Tetapi, dalam uji terbang yang dilakukan, tinggi terbang maksimum yang dapat dicapai hanya berkisar 16 km [15], atau hanya 23 % dari hasil yang diinginkan dalam perancangan.
Untuk mengetahui penyebab prestasi terbang yang rendah ini perlu dilakukan kaji ulang terhadap semua aspek wahana tersebut, meliputi perhitungan karakteristik aerodinamika dan analisis mengenai dinamika dan kestabilan geraknya.
Dalam upaya kaji ulang ini, LAPAN melakukan kerjasama dengan ITB. Kajian yang dilakukan ini terbagi menjadi dua, yaitu (1) kajian mengenai prestasi terbang dan (2) dinamika gerak. Kajian mengenai dinamika gerak roket RX 250 inilah yang melatarbelakangi penelitian ini. Sedangkan kajian mengenai prestasi terbang dilakukan oleh saudara Ahmad Riyadl [21].
Dalam penelitian ini akan dianalisis beberapa aspek mengenai dinamika dan kestabilan roket RX 250 dalam modus longitudinal. Parameter-parameter aerodinamika yang digunakan dalam analisis diperoleh dengan menggunakan perangkat lunak Digital Datcom. Sedangkan simulasi gerak dilakukan dengan menggunakan perangkat lunak MATLAB.
2
D
ASART
EORISelama geraknya, roket yang bergerak dalam medan udara akan selalu mengalami perubahan sikap. Perubahan sikap ini terjadi karena adanya gaya dan momen yang
bekerja pada roket, baik dari dalam maupun luar. Gaya dan momen dari dalam yang dapat menimbulkan perubahan sikap ini adalah gaya dan momen propulsi. Sedangkan gaya dan momen dari luar adalah gaya gravitasi dan gaya serta momen aerodinamika.
Gerak roket dalam ruang tiga dimensi pada Tata Acuan Koordinat (TAK) Inersial merupakan gerak yang kompleks karena terdiri 6 derajat kebebasan. Persamaan ini dapat disederhanakan dengan asumsi gerak roket merupakan gerak pada bidang vertikal (dua dimensi) dalam TAK Inersial, yang dinyatakan sebagai berikut (Perhatikan Gambar 2.1): (2-1a) (2-1b) (2-1c)
Gambar 2-1 Skema Gerak Dua Dimensi
Pada persamaan (2-1) di atas, terlihat bahwa terdapat dua belas variabel yang berperan dalam menentukan gerak roket. Variabel-variabel tersebut adalah massa roket ( ), gaya dorong ( dan ), sudut pitch (), percepatan gravitasi ( dan ), gaya aerodinamika ( dan ), jarak titik tangkap gaya dorong terhadap pusat massa (xe), laju perubahan massa ( ), momen inersia terhadap sumbu-Yb ( ), dan momen aerodinamika
terhadap sumbu-Yb ( ).
Dalam penelitian ini, massa roket diasumsikan berkurang secara konstan karena adanya pembakaran propelan. Massa roket pada saat dihitung menurut persamaan berikut:
(2-2)
dengan adalah Massa awal roket dan laju perubahan massa. Gaya dorong juga dimodelkan berharga konstan sebagai berikut:
(2-3)
dimana impuls spesifik. Dalam penelitian ini, medan gravitasi g akan dihitung menurut persamaan [8]:
(2-4) dengan ( = 9.80665 m/s2) adalah percepatan gravitasi ISA pada muka laut. Momen inersia roket dihitung dengan asumsi bahwa roket terdiri atas beberapa massa diskrit. Sedangkan gaya dan momen aerodinamika dihitung dengan menggunakan koefisien gaya dan momen aerodinamika yang dihasilkan Digital Datcom.
Gambar 2-2 Diagram Gaya dan Momen Aerodinamika yang Bekerja pada Roket
Roket disebut stabil statik jika dapat menghasilkan gaya atau momen yang melawan gangguan. Dengan memperhatikan Gambar 2.2, dapat dipahami bahwa roket dikatakan stabil statik jika menghasilkan momen, Maero negatif akibat penambahan sudut serang, yang ekivalen
negatif. Karena itu, disebut sebagai parameter kestabilan statik. Jika < 0 maka berarti roket stabil
statik. Sedangkan bila > 0, menunjukkan roket tidak
stabil statik. Dan apabila = 0 menunjukkan roket
stabil netral.
Roket dikatakan stabil dinamik jika dapat meredam osilasi yang terjadi akibat gangguan sehingga dapat kembali ke kondisi seimbang awalnya. Cara untuk mengetahui apakah roket ini dapat meredam osilasi atau tidak, adalah dengan memecahkan persamaan gerak. Selanjutnya, untuk menentukan kestabilan dinamik roket akan digunakan kriteria Lyapunov [13].
3
P
ERHITUNGANP
ARAMETERA
ERODINAMIKAR
OKETRX
250
LAPAN
D
ENGAND
IGITALDATCOM
Pada bagian ini akan dijelaskan penerapan perangkat lunak Digital Datcom dalam perhitungan parameter aerodinamika roket, yaitu CL, CD, dan Cm. Perangkat
lunak ini sebenarnya dibuat untuk menghitung karakteristik aerodinamika pesawat udara. Perangkat lunak ini dipilih untuk menghitung karakteristik aerodinamika roket karena konfigurasi roket pada dasarnya serupa dengan pesawat udara. Selain itu, medan gerak roket RX 250 LAPAN sama dengan medan gerak pesawat udara, yaitu medan atmosfer bumi. Dengan X Z i i Zb b X F Sumbu Longitudinal -xe dt d q x cm cp Vcm T L D N Fa l
(+)
M
aeroalasan ini, roket RX 250 dapat dianggap sebagai pesawat udara, sehingga penggunaan Digital Datcom dalam perhitungan karakteristik aerodinamika roket RX 250 dapat dipertanggungjawabkan kesahihannya.
3.1 Tata Nama Roket RX 250 LAPAN
Roket RX 250 LAPAN merupakan salah satu tipe roket eksperimen yang dikembangkan oleh LAPAN. Simbol ‘RX’ di depan nama roket ini adalah kependekan dari Roket eXperimen, sedangkan bilangan ‘250’ menunjukkan diameter body, yaitu 250 mm.
3.2 Geometri Roket RX 250 LAPAN
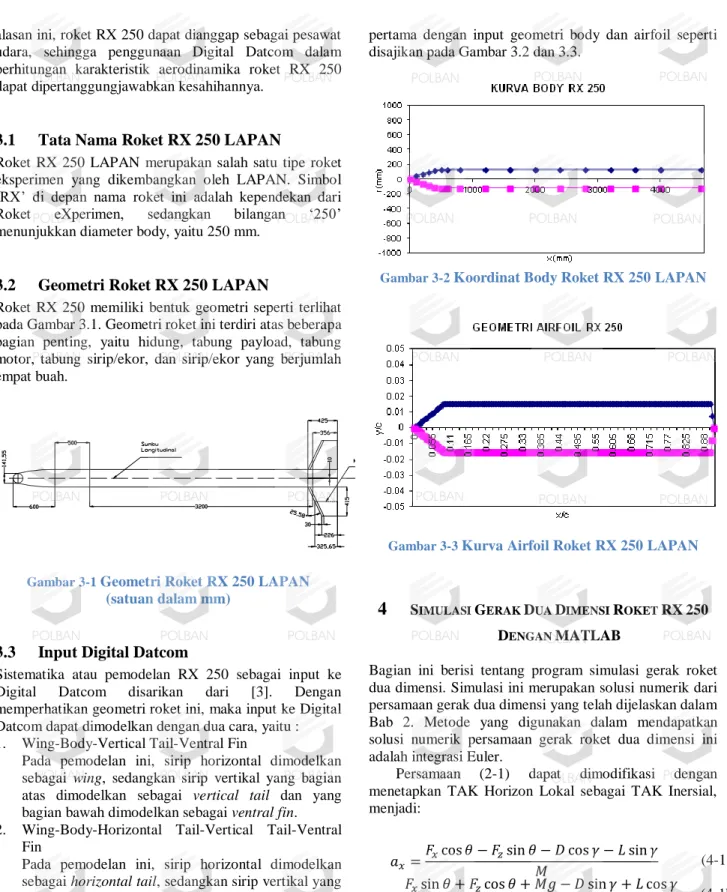
Roket RX 250 memiliki bentuk geometri seperti terlihat pada Gambar 3.1. Geometri roket ini terdiri atas beberapa bagian penting, yaitu hidung, tabung payload, tabung motor, tabung sirip/ekor, dan sirip/ekor yang berjumlah empat buah.
Gambar 3-1 Geometri Roket RX 250 LAPAN (satuan dalam mm)
3.3 Input Digital Datcom
Sistematika atau pemodelan RX 250 sebagai input ke Digital Datcom disarikan dari [3]. Dengan memperhatikan geometri roket ini, maka input ke Digital Datcom dapat dimodelkan dengan dua cara, yaitu : 1. Wing-Body-Vertical Tail-Ventral Fin
Pada pemodelan ini, sirip horizontal dimodelkan sebagai wing, sedangkan sirip vertikal yang bagian atas dimodelkan sebagai vertical tail dan yang bagian bawah dimodelkan sebagai ventral fin. 2. Wing-Body-Horizontal Tail-Vertical Tail-Ventral
Fin
Pada pemodelan ini, sirip horizontal dimodelkan sebagai horizontal tail, sedangkan sirip vertikal yang bagian atas dimodelkan sebagai vertical tail dan yang bagian bawah dimodelkan sebagai ventral fin. Sedangkan geometri yang dimodelkan sebagai wing tidak ada, karena itu untuk pemodelan ini digunakan luas wing nol (Sw = 0 atau Sw 0).
Dari kedua pemodelan di atas, hanya pemodelan pertama saja (Wing-Body-Vertical Tail-Ventral Fin) yang dapat menghasilkan output, sedangkan pemodelan kedua (Wing-Body-Horizontal Vertical Tail-Ventral Fin) menyebabkan proses eksekusi program
error, jadi cara yang digunakan adalah pemodelan
pertama dengan input geometri body dan airfoil seperti disajikan pada Gambar 3.2 dan 3.3.
Gambar 3-2 Koordinat Body Roket RX 250 LAPAN
Gambar 3-3 Kurva Airfoil Roket RX 250 LAPAN
4
SIMULASI GERAK DUA DIMENSI ROKET RX250 DENGAN MATLABBagian ini berisi tentang program simulasi gerak roket dua dimensi. Simulasi ini merupakan solusi numerik dari persamaan gerak dua dimensi yang telah dijelaskan dalam Bab 2. Metode yang digunakan dalam mendapatkan solusi numerik persamaan gerak roket dua dimensi ini adalah integrasi Euler.
Persamaan (2-1) dapat dimodifikasi dengan menetapkan TAK Horizon Lokal sebagai TAK Inersial, menjadi: (4-1a) (4-1b) (4-1c)
dengan dan adalah percepatan roket pada sumbu dan TAK Horizon Lokal, adalah percepatan sudut pitch, sudut lintas terbang, dan adalah gaya hambat dan gaya angkat.
4.1 Metode Integrasi Numerik
Selanjutnya, persamaan (4-1) diselesaikan secara numerik dengan integrasi Euler sebagai berikut:
(4-2a) (4-2b) (4-2c) (4-2d) (4-2e) (4-2f)
Perhitungan persamaan (4-2) ini dilakukan dengan menggunakan selang waktu integrasi, yang sangat kecil, pada suatu waktu awal, to dan berakhir pada waktu akhir, tstop.
Variabel yang akan diamati untuk mengetahui kestabilan roket adalah sudut serang , sudut lintas terbang , dan sudut sikap (pitch) , dalam selang waktu sejak roket diluncurkan hingga propelan habis (tb = 9 detik). Karena itu, selang waktu yang akan digunakan dalam simulasi ini adalah dari to = 0 hingga tstop = 15 detik.
Hasil perhitungan ini akan semakin teliti jika selang waktu integrasi, semakin kecil. Tetapi, proses perhitungan menjadi semakin lambat. Karena itu, pemilihan yang sesuai, dapat menghasilkan solusi yang akurat dengan proses perhitungan yang cukup cepat. Dengan alasan tersebut, dalam simulasi gerak dengan MATLAB ini digunakan = 0.01 detik.
4.2 Algoritma Program Simulasi
Dalam program simulasi, koefisien gaya dan momen aerodinamika diperoleh dengan melakukan interpolasi linear terhadap hasil perhitungan Digital Datcom. Sementara, simulasi gerak dilakukan dengan menggunakan persamaan (4-1) dan (4-2). Dengan demikian, algoritma program simulasi dapat disusun sebagai berikut :
Pada saat to, tentukan input (harga awal):
Fx, Fz, M, Iyy, Xi, Zi, Vx, Vz,
, , xe, g, , D, L,Maero;
Selama t tstop dan stop lakukan :
Selama roket bergerak pada peluncur, hitung : = 0; = o;
t = t + t;
persamaan (4-1); persamaan (4-2); interpolasi CL, CD, Cm;
M, D, L, Maero, Iyy,xe, g(h), (h); Setelah roket lepas dari peluncur, hitung :
t = t + t; persamaan (4-1); persamaan (4-2); interpolasi CL, CD, Cm; M, D, L, Maero, Iyy,xe; g(h), (h); Selesai
5
ANALISIS HASIL PERHITUNGAN DAN SIMULASIDalam bagian ini akan dibahas data hasil perhitungan parameter aerodinamika dan kestabilan roket RX 250 LAPAN dari Bagian 3, serta hasil simulasi gerak roket dua dimensi dari Bagian 4.
5.1 Analisis Hasil Perhitungan Digital Datcom
(a) Pengaruh Bilangan Mach
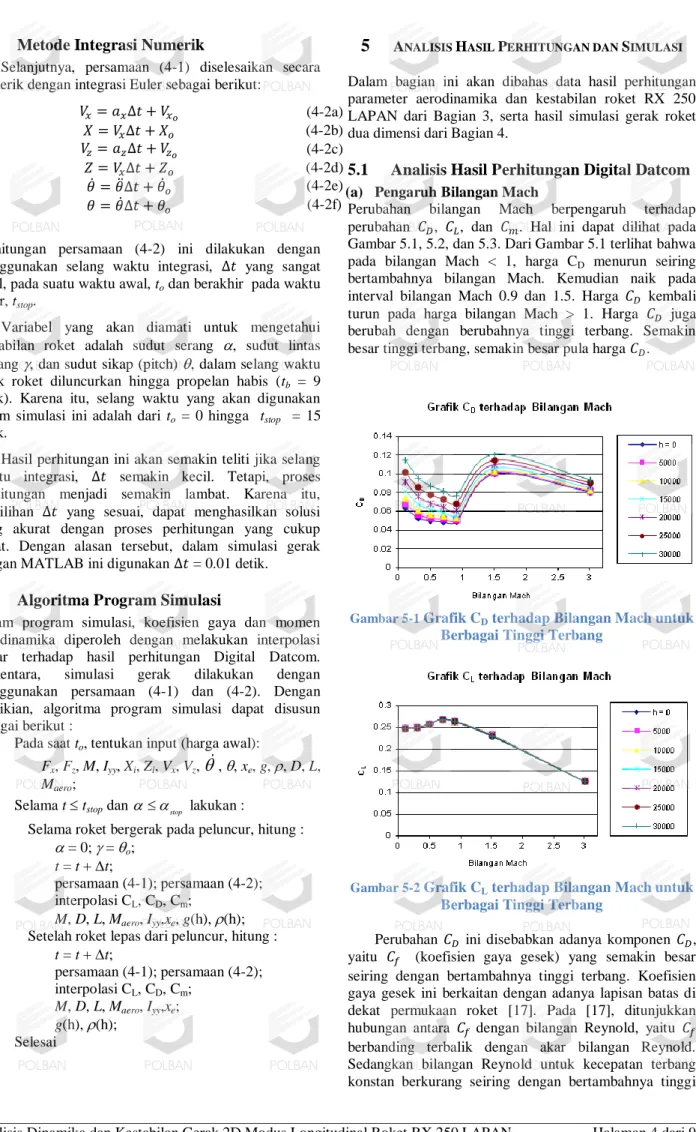
Perubahan bilangan Mach berpengaruh terhadap perubahan , , dan . Hal ini dapat dilihat pada Gambar 5.1, 5.2, dan 5.3. Dari Gambar 5.1 terlihat bahwa pada bilangan Mach < 1, harga CD menurun seiring
bertambahnya bilangan Mach. Kemudian naik pada interval bilangan Mach 0.9 dan 1.5. Harga kembali turun pada harga bilangan Mach > 1. Harga juga berubah dengan berubahnya tinggi terbang. Semakin besar tinggi terbang, semakin besar pula harga .
Gambar 5-1 Grafik CD terhadap Bilangan Mach untuk Berbagai Tinggi Terbang
Gambar 5-2 Grafik CL terhadap Bilangan Mach untuk Berbagai Tinggi Terbang
Perubahan ini disebabkan adanya komponen , yaitu (koefisien gaya gesek) yang semakin besar
seiring dengan bertambahnya tinggi terbang. Koefisien gaya gesek ini berkaitan dengan adanya lapisan batas di dekat permukaan roket [17]. Pada [17], ditunjukkan hubungan antara dengan bilangan Reynold, yaitu
berbanding terbalik dengan akar bilangan Reynold. Sedangkan bilangan Reynold untuk kecepatan terbang konstan berkurang seiring dengan bertambahnya tinggi
terbang. Karena itu, bertambah besar seiring dengan bertambahnya tinggi terbang
Gambar 5-3 Grafik Cm terhadap Bilangan Mach untuk Berbagai Tinggi Terbang
Perubahan terhadap bilangan Mach dapat dilihat pada Gambar 5.2. Pada gambar ini terlihat bahwa naik sampai bilangan Mach = 0.7, dan kemudian turun untuk > 0.7. Dari gambar ini juga terlihat bahwa relatif konstan terhadap perubahan tinggi terbang.
Perubahan terhadap bilangan Mach serupa dengan . Pada Gambr 5.3 terlihat bahwa turun sampai bilangan Mach = 0.7 dan kemudian naik untuk bilangan Mach > 0.7. Dari gambar terlihat bahwa relatif tetap meskipun tinggi terbang berubah. (b) Pengaruh Sudut Serang
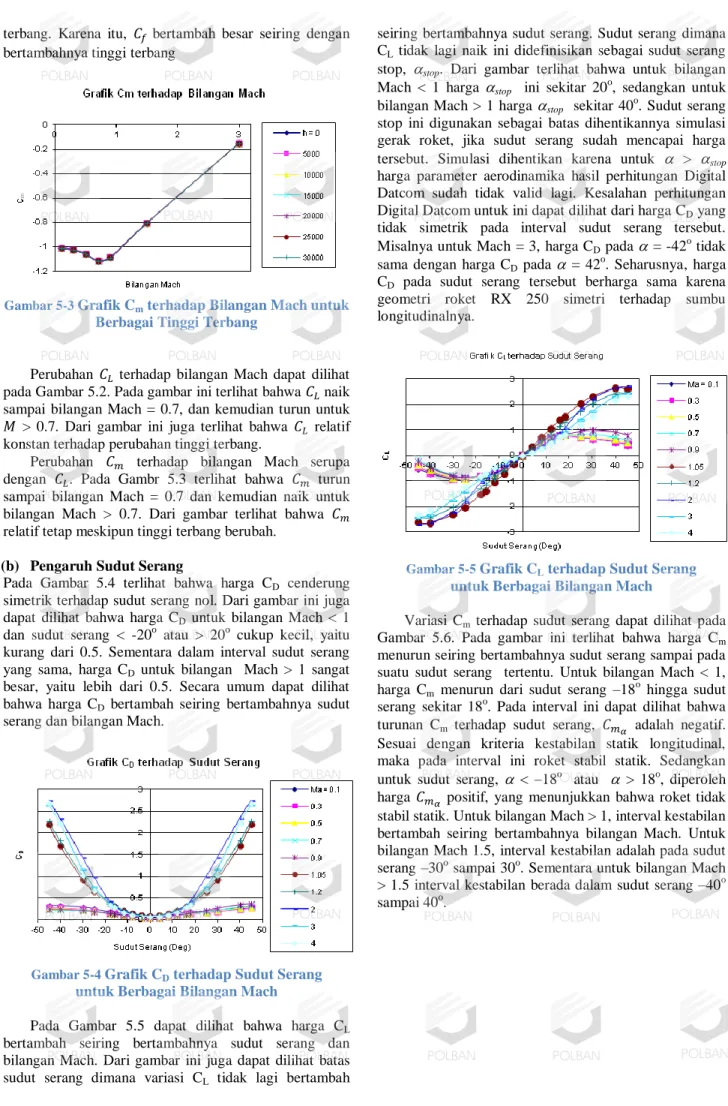
Pada Gambar 5.4 terlihat bahwa harga CD cenderung
simetrik terhadap sudut serang nol. Dari gambar ini juga dapat dilihat bahwa harga CD untuk bilangan Mach < 1
dan sudut serang < -20o atau > 20o cukup kecil, yaitu kurang dari 0.5. Sementara dalam interval sudut serang yang sama, harga CD untuk bilangan Mach > 1 sangat
besar, yaitu lebih dari 0.5. Secara umum dapat dilihat bahwa harga CD bertambah seiring bertambahnya sudut
serang dan bilangan Mach.
Gambar 5-4 Grafik CD terhadap Sudut Serang untuk Berbagai Bilangan Mach
Pada Gambar 5.5 dapat dilihat bahwa harga CL
bertambah seiring bertambahnya sudut serang dan bilangan Mach. Dari gambar ini juga dapat dilihat batas sudut serang dimana variasi CL tidak lagi bertambah
seiring bertambahnya sudut serang. Sudut serang dimana CL tidak lagi naik ini didefinisikan sebagai sudut serang
stop, stop. Dari gambar terlihat bahwa untuk bilangan Mach < 1 harga stop ini sekitar 20o, sedangkan untuk bilangan Mach > 1 harga stop sekitar 40
o
. Sudut serang stop ini digunakan sebagai batas dihentikannya simulasi gerak roket, jika sudut serang sudah mencapai harga tersebut. Simulasi dihentikan karena untuk > stop harga parameter aerodinamika hasil perhitungan Digital Datcom sudah tidak valid lagi. Kesalahan perhitungan Digital Datcom untuk ini dapat dilihat dari harga CD yang
tidak simetrik pada interval sudut serang tersebut. Misalnya untuk Mach = 3, harga CD pada = -42o tidak
sama dengan harga CD pada = 42 o
. Seharusnya, harga CD pada sudut serang tersebut berharga sama karena
geometri roket RX 250 simetri terhadap sumbu longitudinalnya.
Gambar 5-5 Grafik CL terhadap Sudut Serang untuk Berbagai Bilangan Mach
Variasi Cm terhadap sudut serang dapat dilihat pada
Gambar 5.6. Pada gambar ini terlihat bahwa harga Cm
menurun seiring bertambahnya sudut serang sampai pada suatu sudut serang tertentu. Untuk bilangan Mach < 1, harga Cm menurun dari sudut serang –18o hingga sudut
serang sekitar 18o. Pada interval ini dapat dilihat bahwa turunan Cm terhadap sudut serang, adalah negatif.
Sesuai dengan kriteria kestabilan statik longitudinal, maka pada interval ini roket stabil statik. Sedangkan untuk sudut serang, < –18o atau > 18o, diperoleh harga positif, yang menunjukkan bahwa roket tidak stabil statik. Untuk bilangan Mach > 1, interval kestabilan bertambah seiring bertambahnya bilangan Mach. Untuk bilangan Mach 1.5, interval kestabilan adalah pada sudut serang –30o sampai 30o. Sementara untuk bilangan Mach > 1.5 interval kestabilan berada dalam sudut serang –40o sampai 40o.
Gambar 5-6 6 Grafik Cm terhadap Sudut Serang untuk Berbagai Bilangan Mach
(c) Pengaruh Posisi Center of Mass
Perubahan posisi center of mass hanya berpengaruh terhadap Cm tetapi tidak berpengaruh terhadap CD dan
CL. Hal ini dapat dilihat pada Gambar 5.7. Semakin besar
posisi cm (semakin dekat dengan ekor), semakin besar (positif) pula harga Cm. Meskipun harga Cm ini berubah,
namun harga perubahannya kecil. Perubahan harga Cm
yang kecil ini tidak terlalu berpengaruh terhadap kestabilan roket.
Dari Gambar 5.7 juga dapat dilihat bahwa perubahan bilangan Mach berpengaruh terhadap harga Cm. Di sini
terlihat bahwa untuk bilangan Mach < 1, harga Cm
semakin negatif seiring bertambahnya bilangan Mach. Tetapi, untuk bilanga Mach > 1 berlaku sebaliknya, yaitu harga Cm semakin positif seiring bertambahnya bilangan Mach.
Gambar 5-7 Grafik Cm terhadap Posisi cg untuk Berbagai Bilangan Mach
5.2 Analisis Hasil Simulasi
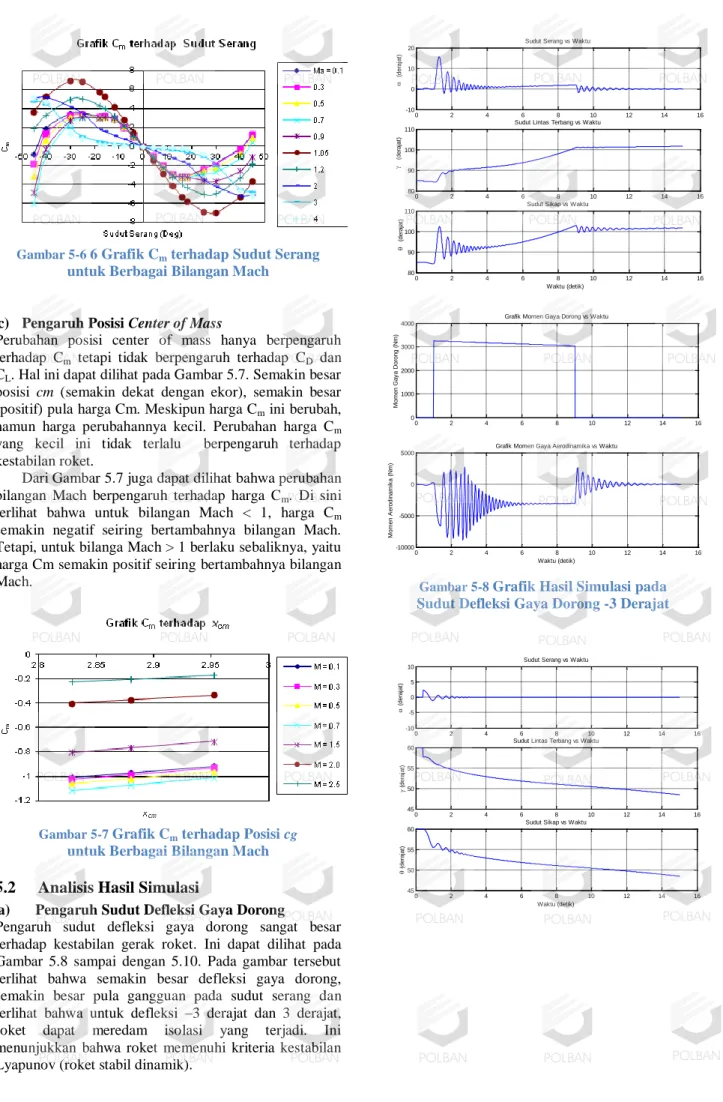
(a) Pengaruh Sudut Defleksi Gaya Dorong
Pengaruh sudut defleksi gaya dorong sangat besar terhadap kestabilan gerak roket. Ini dapat dilihat pada Gambar 5.8 sampai dengan 5.10. Pada gambar tersebut terlihat bahwa semakin besar defleksi gaya dorong, semakin besar pula gangguan pada sudut serang dan terlihat bahwa untuk defleksi –3 derajat dan 3 derajat, roket dapat meredam isolasi yang terjadi. Ini menunjukkan bahwa roket memenuhi kriteria kestabilan Lyapunov (roket stabil dinamik).
Gambar 5-8 Grafik Hasil Simulasi pada Sudut Defleksi Gaya Dorong -3 Derajat
0 2 4 6 8 10 12 14 16
-10 0 10 20
Sudut Serang vs Waktu
0 2 4 6 8 10 12 14 16
80 90 100 110
Sudut Lintas Terbang vs Waktu
0 2 4 6 8 10 12 14 16
80 90 100 110
Sudut Sikap vs Waktu
(d e ra ja t) (d e ra ja t) (d e ra ja t) Waktu (detik) 0 2 4 6 8 10 12 14 16 0 1000 2000 3000 4000 M o m e n G a y a D o ro n g ( N m )
Grafik Momen Gaya Dorong vs Waktu
0 2 4 6 8 10 12 14 16 -10000 -5000 0 5000 Waktu (detik) M o m e n A e ro d in a m ik a ( N m )
Grafik Momen Gaya Aerodinamika vs Waktu
0 2 4 6 8 10 12 14 16 -10 -5 0 5 10
Sudut Serang vs Waktu
( d e ra ja t) 0 2 4 6 8 10 12 14 16 45 50 55 60
Sudut Lintas Terbang vs Waktu
( d e ra ja t) 0 2 4 6 8 10 12 14 16 45 50 55 60
Sudut Sikap vs Waktu
Waktu (detik) ( d e ra ja t)
Gambar 5-9 Grafik Hasil Simulasi pada Sudut Defleksi Gaya Dorong 0 Derajat
Gambar 5-10 Grafik Hasil Simulasi pada Sudut Defleksi Gaya Dorong 3 Derajat
5.3 Trayektori (Lintas) Terbang
Berikut ini akan disajikan perbandingan trayektori terbang roket RX 250 hasil uji terbang LAPAN dengan hasil simulasi dalam penelitian penelitian ini. Trayektori hasil uji terbang LAPAN disajikan dalam Gambar 5.11 sedangkan trayektori hasil simulasi disajikan dalam
Gambar 5.12, Gambar 5.13, dan Gambar 5.14. Simulasi dilakukan dengan panjang peluncur 10 meter dan berbagai sudut peluncuran (sudut elevasi).
Gambar 5-11 Trayektori Roket RX 250 LAPAN hasil Uji Terbang LAPAN [14]
Gambar 5-12 Trayektori Roket RX 250 LAPAN hasil Uji Terbang LAPAN
Gambar 5-13 Trayektori Roket RX 250 LAPAN hasil Simulasi Dengan lp = 10 m, = 3o
Gambar 5-14 Trayektori Roket RX 250 LAPAN hasil Simulasi Dengan lp = 10 m, = 0 o 0 2 4 6 8 10 12 14 16 -1 -0.5 0 0.5 1 M o m e n G a y a D o ro n g ( N m )
Grafik Momen Gaya Dorong vs Waktu
0 2 4 6 8 10 12 14 16 -5000 0 5000 Waktu (detik) M o m e n A e ro d in a m ik a ( N m )
Grafik Momen Gaya Aerodinamika vs Waktu
0 2 4 6 8 10 12 14 16
-20 -10 0 10
Sudut Serang vs Waktu
0 2 4 6 8 10 12 14 16
60 70 80 90
Sudut Lintas Terbang vs Waktu
0 2 4 6 8 10 12 14 16
60 70 80 90
Sudut Sikap vs Waktu
(d e ra ja t) (d e ra ja t) (d e ra ja t) Waktu (detik) 0 2 4 6 8 10 12 14 16 -4000 -3000 -2000 -1000 0 M o m e n G a y a D o ro n g ( N m )
Grafik Momen Gaya Dorong vs Waktu
0 2 4 6 8 10 12 14 16 -4000 -2000 0 2000 4000 6000 8000 Waktu (detik) M o m e n A e ro d in a m ik a ( N m )
Grafik Momen Gaya Aerodinamika vs Waktu
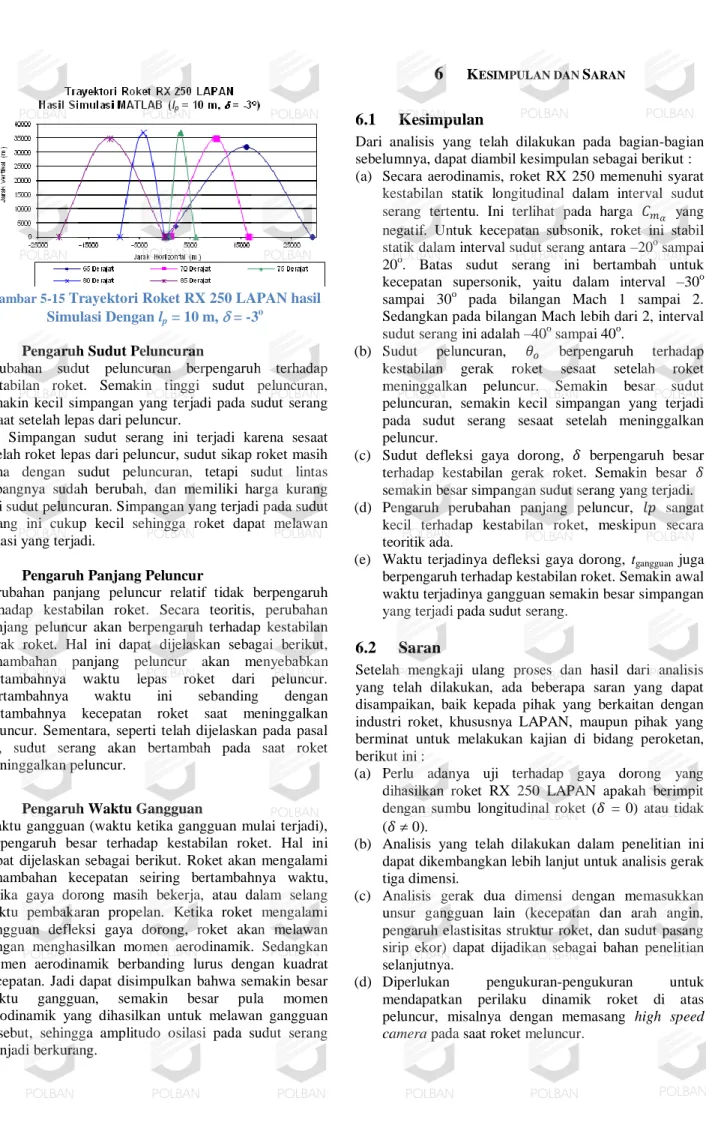
Gambar 5-15 Trayektori Roket RX 250 LAPAN hasil Simulasi Dengan lp = 10 m, = -3o
(b) Pengaruh Sudut Peluncuran
Perubahan sudut peluncuran berpengaruh terhadap kestabilan roket. Semakin tinggi sudut peluncuran, semakin kecil simpangan yang terjadi pada sudut serang sesaat setelah lepas dari peluncur.
Simpangan sudut serang ini terjadi karena sesaat setelah roket lepas dari peluncur, sudut sikap roket masih sama dengan sudut peluncuran, tetapi sudut lintas terbangnya sudah berubah, dan memiliki harga kurang dari sudut peluncuran. Simpangan yang terjadi pada sudut serang ini cukup kecil sehingga roket dapat melawan osilasi yang terjadi.
(c) Pengaruh Panjang Peluncur
Perubahan panjang peluncur relatif tidak berpengaruh terhadap kestabilan roket. Secara teoritis, perubahan panjang peluncur akan berpengaruh terhadap kestabilan gerak roket. Hal ini dapat dijelaskan sebagai berikut, penambahan panjang peluncur akan menyebabkan bertambahnya waktu lepas roket dari peluncur. Bertambahnya waktu ini sebanding dengan bertambahnya kecepatan roket saat meninggalkan peluncur. Sementara, seperti telah dijelaskan pada pasal (c), sudut serang akan bertambah pada saat roket meninggalkan peluncur.
(d) Pengaruh Waktu Gangguan
Waktu gangguan (waktu ketika gangguan mulai terjadi), berpengaruh besar terhadap kestabilan roket. Hal ini dapat dijelaskan sebagai berikut. Roket akan mengalami penambahan kecepatan seiring bertambahnya waktu, ketika gaya dorong masih bekerja, atau dalam selang waktu pembakaran propelan. Ketika roket mengalami gangguan defleksi gaya dorong, roket akan melawan dengan menghasilkan momen aerodinamik. Sedangkan momen aerodinamik berbanding lurus dengan kuadrat kecepatan. Jadi dapat disimpulkan bahwa semakin besar waktu gangguan, semakin besar pula momen aerodinamik yang dihasilkan untuk melawan gangguan tersebut, sehingga amplitudo osilasi pada sudut serang menjadi berkurang.
6
KESIMPULAN DAN SARAN6.1 Kesimpulan
Dari analisis yang telah dilakukan pada bagian-bagian sebelumnya, dapat diambil kesimpulan sebagai berikut : (a) Secara aerodinamis, roket RX 250 memenuhi syarat
kestabilan statik longitudinal dalam interval sudut serang tertentu. Ini terlihat pada harga yang negatif. Untuk kecepatan subsonik, roket ini stabil statik dalam interval sudut serang antara –20o sampai 20o. Batas sudut serang ini bertambah untuk kecepatan supersonik, yaitu dalam interval –30o sampai 30o pada bilangan Mach 1 sampai 2. Sedangkan pada bilangan Mach lebih dari 2, interval sudut serang ini adalah –40o sampai 40o.
(b) Sudut peluncuran, berpengaruh terhadap kestabilan gerak roket sesaat setelah roket meninggalkan peluncur. Semakin besar sudut peluncuran, semakin kecil simpangan yang terjadi pada sudut serang sesaat setelah meninggalkan peluncur.
(c) Sudut defleksi gaya dorong, berpengaruh besar terhadap kestabilan gerak roket. Semakin besar semakin besar simpangan sudut serang yang terjadi. (d) Pengaruh perubahan panjang peluncur, sangat
kecil terhadap kestabilan roket, meskipun secara teoritik ada.
(e) Waktu terjadinya defleksi gaya dorong, tgangguan juga
berpengaruh terhadap kestabilan roket. Semakin awal waktu terjadinya gangguan semakin besar simpangan yang terjadi pada sudut serang.
6.2 Saran
Setelah mengkaji ulang proses dan hasil dari analisis yang telah dilakukan, ada beberapa saran yang dapat disampaikan, baik kepada pihak yang berkaitan dengan industri roket, khususnya LAPAN, maupun pihak yang berminat untuk melakukan kajian di bidang peroketan, berikut ini :
(a) Perlu adanya uji terhadap gaya dorong yang dihasilkan roket RX 250 LAPAN apakah berimpit dengan sumbu longitudinal roket ( = 0) atau tidak ( 0).
(b) Analisis yang telah dilakukan dalam penelitian ini dapat dikembangkan lebih lanjut untuk analisis gerak tiga dimensi.
(c) Analisis gerak dua dimensi dengan memasukkan unsur gangguan lain (kecepatan dan arah angin, pengaruh elastisitas struktur roket, dan sudut pasang sirip ekor) dapat dijadikan sebagai bahan penelitian selanjutnya.
(d) Diperlukan pengukuran-pengukuran untuk mendapatkan perilaku dinamik roket di atas peluncur, misalnya dengan memasang high speed
camera pada saat roket meluncur.
REFERENSI
[1] Cornelisse, J. W. Rocket Propulsion and
Spceflight Dynamics. Pitman Publishing ltd.
London, 1979.
[2] Nielsen, J. N. Missile Aerodynamics. McGraw-Hill. American Institute of Aeronautics and Astronautics. New York, 1960.
[3] Williams, J. E. The USAF Stability and Control
Digital Datcom-Volume I. Airforce Flight
Dynamics Laboratory Wright-Patterson Air Force Base. Ohio, 1979.
[4] Meriam, J. L. and Kraige, L. G. Engineering
Mechanics Volume One. John Wiley & Sons, Inc.
USA, 1993.
[5] Muhammad, Hari. Catatan Kuliah Teknik
Pengukuran Terbang. Jurusan Teknik Penerbangan ITB.
[6] Blakelock, J. H. Automatic Control of Aircraft
and Missiles. John Wiley & Sons, Inc. USA,
1991.
[7] Hanselman, D and Littlefield, B. The Student
Edition of MATLAB Version 5 User’s Guide.
Prentice Hall. New Jersey, 1997.
[8] Ruijgrok, G. J. J. Elements of Airplane
Performance. Delft University Press, 1990.
[9] Jenie, Said D. Manual Perancangan Roket
Kendali. Pusat Roket dan Satelit, Lembaga
Penerbangan Antariksa Nasional, 1990.
[10] Dornberger, Walter. V-2 & Hitler. PT Pustaka Utama Grafiti. Jakarta. 1989.
[11] Jenie, Said D. dan Muhammad, Hari. Mekanika
Terbang Lintasan Roket. Laboratorium Aerodinamika Pusat Antar Universitas – Ilmu Rekayasa ITB. Bandung, 1987.
[12] Muhammad, Hari. Catatan Kuliah Dinamika
Terbang. Jurusan Teknik Penerbangan ITB.
[13] Hughes, Peter C. Spacecraft Attitude Dynamics. John Wiley & Sons, Inc. USA, 1996.
[14] Anon. Data Roket RX 250. LAPAN. [15] Anon. Desain Wahana RX 250. LAPAN. [16] Anon. Motor Roket RX 250. LAPAN.
[17] Anderson, John D. Fundamental of Aerodynamics. John Wiley & Sons, Inc. USA,
1992.
[18] LaBudde, V. Edward. A Design Procedure for
Maximazing Altitude Performance. NARAM,
1999.
[19] Menon, P. K. and Yosefpor, M. Design of
Nonlinear Autopilots for High Angle of Attack.
Optimal Synthesis, 1996.
[20] Dasril, Iqbal F. Analisis Kestabilan Statik Matra
Longitudinal Pesawat Udara Wing-In-Surface-Effect Konfigurasi NWIG10B-WING11. Laporan
Tugas Sarjana, Departemen Teknik Penerbangan, Fakultas Teknologi Industri, ITB. Bandung, 2001. [21] Riyadl, Ahmad. Perhitungan Karakteristik Aerodinamika dan Analisis Prestasi Terbang Roket RX 250 LAPAN. Laporan Tugas Sarjana,
Departemen Teknik Penerbangan, Fakultas Teknologi Industri, ITB. Bandung, 2002.
[22] Iskandar, Tulus. Desain Lintasan Antar Planet
Bumi – Pluto (Misi Fly-By). Laporan Tugas
Sarjana, Departemen Teknik Penerbangan, Fakultas Teknologi Industri, ITB. Bandung, 2001.