BAB II
LANDASAN TEORI
2.1 Fluida
Fluida atau zat alir adalah zat yang dapat mengalir dan bentuknya selalu berubah dengan perubahan volume, yang termasuk dalam kategori fluida adalah zat cair dan gas. Fluida mempunyai kerapatan yang harganya tertentu pada temperatur dan tekanan tertentu. Harga kerapatannya tergantung pada temperatur dan tekanan, apabila temperatur dan tekanan suatu fluida berubah maka kerapatannya akan berubah. Bagi zat cair kerapatannya tidak akan terpengaruh oleh perubahan temperatur dan tekanan, hal ini juga dinamakan fluida tidak dapat mampat (incompresible) sedangkan gas sangat dipengaruh oleh perubahan temperatur dan tekanan dan dikenal juga sebagai fluida dapat mampat (compresible).
Jadi berdasarkan kerapatannya maka fluida dapat dibedakan sebagai berikut :
1. Fluida tak mampu mampat (incompressible), yaitu : densitas fluida hanya sedikit terpengaruh oleh perubahan yang besar terhadap tekanan dan suhu. Contoh : Air
2. Fluida mampu mampat (compressible), yaitu : fluida yang apabila diberi gaya tekanan, maka volume dan suhunya akan mengalami perubahan.
Contoh : Gas
dan berdasarkan mekanika fluida, fluida dapat dibedakan menjadi 2 jenis : a. Fluida tidak bergerak / dalam keadaan diam (statika fluida)
b. Fluida bergerak / dalam keadaan bergerak (dinamika fluida)
Konsep mekanika fluida berada dalam dua keadaan, yaitu sebagai zat padat dan cair (fluida). Sebuah zat padat umumnya mempunyai bentuk yang tertentu, sedangkan zat cair dan gas mempunyai bentuk yang ditetapkan oleh wadahnya sendiri (masing-masing). Perbedaan dasar antara zat cair dan gas (keduanya digolongkan sebagai fluida) adalah bahwa gas akan menyebar dan mengisi seluruh wadah yang
ditempatinya. Defenisi yang lebih tepat untuk membedakan zat padat dengan fluida adalah dari krateristik deformasi bahan tersebut. Zat padat dianggap sebagai bahan yang menunjukkan reaksi deformasi yang terbatas ketika menerima suatu gaya geser (shear). Fluida dapat didefenisikan sebagai suatu zat yang terus menerus berubah bentuk apabila mengalami tegangan geser, fluida tidak mampu menahan tegangan geser tanpa berubah bentuk. Kendatipun demikian ada bahan-bahan seperti oli, cat, ter dan larutan polimer yang menunjukkan karakteristik zat padat atau fluida tergantung dari tegangan geser yang dialami. Umumnya makin besar laju deformasi fluida, makin besar pula tegangan geser untuk fluida tersebut.
Defenisi tentang fluida ini mengingatkan bahwa tegangan geser ada bila sebuah fluida sedang mengalami deformasi. Air dalam sebuah wadah yang digerakkan atau dirotasikan dengan kecepatan atau percepatan konstan tidak akan menunjukkan deformasi sehingga tidak mengalami tegangan geser. Namun agar tegangan geser itu ada, fluida harus viskos sebagai mana karateristik yang ditunjukkan oleh semua fluida sejati. Fluida ideal boleh didefenisikan sebagai fluida yang tidak viskos. Jadi tegangan geser pada fluida ideal tidak ada, bahkan meskipun fluida itu mengalami deformasi. Walaupun fluida yang tidak viskos tidak pernah ada studi tentang fluida seperti ini penting sekali untuk rekayasa karena perilaku fluida viskos sering ideal dapat dijabarkan analisis terhadap gerak fluida yang ideal tersebut.
2.1.1 Aliran Fluida
Salah satu ciri khas dari fluida adalah bahwa fluida dapat mengalir. Adapun bentuk dan jenis aliran fluida tersebut adalah sebagai berikut :
a. Aliran laminar dan aliran turbulen
Ditinjau dari jenis aliran, dapat diklasifikasikan menjadi aliran laminar dan aliran turbulen. Aliran fliuida dikatakan laminar jika lapisan fluida bergerak dengan kecepatan yang sama dan dengan lintasan partikel yang tidak memotong atau
menyilang, atau dapat dikatakan bahwa aliran laminar di tandai dengan tidak adanya ketidak beraturan atau fluktuasi di dalam aliran fluida. Karena aliran fluida pada aliran laminar bergerak dalam lintasan yang sama tetap maka aliran laminar dapat diamati. Partikel fluida pada aliran laminar jarang dijumpai dalam praktek hidrolika. Sedangkan aliran dikatakan turbulen, jika gerakan fluida tidak lagi tenang dan tunak (berlapis atau laminar) melainkan menjadi bergolak dan bergejolak (bergolak atau turbulen). Pada aliran turbulen partikel fluida tidak membuat fluktuasi tertentu dan tidak memperlihatkan pola gerakan yang dapat diamati. Aliran turbulen hampir dapat dijumpai pada praktek hidrolika. Diantara aliran laminar dan turbulen terdapat daerah yang dikenal dengan daerah transisi.
b. Aliran Steady dan Aliran Uniform
Aliran disebut steady (tenang) apabila aliran semua tempat disepanjang lintasan aliran tidak berubah menurut waktu. Sedangkan aliran Uniform dapat diartikan sebagai suatu keadaan aliran yang tidak berubah diseluruh ruang. Kedua defenisi ini sering dipakai pada keadaan aliran turbulen dan biasanya dianggap aliran steady yang berarti aliran steady rata-rata.Demikian pula aliran uniform berarti uniform rata-rata
2.2 Viskositas
Kekentalan (viscosity) didefinisikan sebagai gesekan internal atau gesekan fluida terhadap wadah dimana fluida itu mengalir. Viskositas ada dalam cairan atau gas, dan pada dasarnya adalah gesekan antar lapisan fluida yang berdekatan ketika bergerak melintasi satu sama lain atau gesekan antara fluida dengan wadah tempat ia mengalir. Viskositas dapat juga diartikan sebagai pengukuran dari ketahanan fluida yang diubah baik dengan tekanan maupun tegangan. Pada masalah sehari-hari (dan hanya untuk fluida), viskositas adalah "Ketebalan" atau "pergesekan internal". Oleh karena itu, air yang "tipis", memiliki viskositas lebih rendah,
sedangkan madu yang "tebal", memiliki viskositas yang lebih tinggi. Sederhananya, semakin rendah viskositas suatu fluida, semakin besar juga pergerakan dari fluida tersebut.
Viskositas menjelaskan ketahanan internal fluida untuk mengalir dan mungkin dapat dipikirkan sebagai pengukuran dari pergeseran fluida. Sebagai contoh, viskositas yang tinggi dari magma akan menciptakan statovolcano yang tinggi dan curam, karena tidak dapat mengalir terlalu jauh sebelum mendingin, sedangkan viskositas yang lebih rendah dari lava akan menciptakan volcano yang rendah dan lebar. Seluruh fluida (kecuali superfluida) memiliki ketahanan dari tekanan dan oleh karena itu disebut kental, tetapi fluida yang tidak memiliki ketahanan tekanan dan tegangan disebut fluide ideal.
Hubungan fluida dan viskositas adalah dalam fluida yang tidak diidealisir terdapat aktivitas molekuler antara bagian-bagian lapisannya. Salah satu akibat dari adanya aktivitas ini adalah timbulnya gesekan internal antara bagian-bagian tersebut, yang dapat digambarkan sebagai gaya luncur diantara lapisan-lapisan fluida tadi. Hal ini dapat dilihat dari perbedaan kecepatan bergerak lapisan-lapisan fluida tersebut. Bila pengamatan dilakukan terhadap aliran fluida makin mengecil ditempat tempat yang jaraknya terhadap dinding pipa semakin kecil, dan praktis tidak bergerak pada tempat di dinding pipa. Sedangkan kecepatan terbesar terdapat ditengah-tengah pipa aliran.
Dalam cairan, kekentalan disebabkan oleh gaya kohesif antara molekul-molekulnya sedangkan gas, berasal tumbukan diantara molekul-molekul tersebut. Kekentalan fluida yang berbeda dapat dinyatakan secara kuantatif dengan koefisien
kekentalan, η yang didefinisikan dengan cara Fluida diletakkan diantara dua
lempengan datar. Salah satu lempengan diam dan yang lain dibuat bergerak. Fluida yang secara langsung bersinggungan dengan masing-masing lempengan ditarik pada permukaanya oleh gaya rekat diantara molekul-molekul cairan dengan kedua lempengan tersebut. Dengan demikian permukaan fluida sebelah atas bergerak dengan laju v yang seperti lempengan atas, sedangkan fluida yang bersinggungan dengan lempengan diam bertahan diam. Viskositas merupakan ukuran kekentalan
fluida yang menyatakan besar kecilnya gesekan di dalam fluida. Makin besar viskositas suatu fluida, maka makin sulit suatu fluida mengalir dan makin sulit suatu benda bergerak di dalam fluida tersebut. Di dalam zat cair, viskositas dihasilkan oleh gaya kohesi antara molekul zat cair. Sedangkan dalam gas, viskositas timbul sebagai akibat tumbukan antara molekul gas. Viskositas zat cair dapat ditentukan secara kuantitatif dengan besaran yang disebut koefisien viskositas. Satuan SI untuk koefisien viskositas adalah Ns/m2 atau pascal sekon (Pa s). Apabila suatu benda bergerak dengan kelajuan v dalam suatu fluida kental yang koefisien viskositasnya, maka benda tersebut akan mengalami gaya gesekan fluida, dengan k adalah konstanta yang bergantung pada bentuk geometris benda. Berdasarkan perhitungan laboratorium, pada tahun 1845, Sir George Stokes menunjukkan bahwa untuk benda
yang bentuk geometrisnya berupa bola nilai k = 6 π r. Bila nilai k dimasukkan ke
dalam persamaan maka diperoleh sebuah persamaan
F =6 π ŋ r v ………(2.1)
Dengan ŋ: koefisien viskositas,
π: jari-jari bola,
r : jari-jari geometris bola, dan
v : kecepatan aliran benda terhadap fluida.
Konsep viskositas fluida, baik zat cair maupun zat gas yang jenisnya berbeda memiliki tingkat kekentalan yang berbeda. Misalnya sirup dan air. Sirup biasanya lebih kental dari air. Atau air susu, minyak goreng, oli, darah, dan lain-lain. Tingkat kekentalan setiap zat cair tersebut berbeda-beda. Pada umumnya, zat cair lebih kental dari zat gas. Viskositas alias kekentalan sebenarnya merupakan gaya gesekan antara molekul-molekul yang menyusun suatu fluida. Viskositas adalah gaya gesekan internal fluida. Jadi molekul-molekul yang membentuk suatu fluida saling gesekmenggesek ketika fluida tersebut mengalir. Pada zat cair, viskositas disebabkan karena adanya gaya kohesi (gaya tarik menarik antara molekul sejenis). Sedangkan dalam zat gas, viskositas disebabkan oleh tumbukan antar molekul.
Fluida yang lebih cair biasanya lebih mudah mengalir, contohnya air. Sebaliknya, fluida yang lebih kental lebih sulit mengalir, contohnya minyak goreng,
oli, madu dan lain-lain. Tingkat kekentalan suatu fluida juga bergantung pada suhu. Semakin tinggi suhu zat cair, semakin kurang kental zat cair tersebut. Viskositas atau kekentalan hanya ada pada fluida riil. Fluida riil/nyata adalah fluida yang kita temui dalam kehidupan sehari-hari, seperti air, sirup, oli, asap knalpot, dan lain-lain. Fluida riil berbeda dengan fluida ideal. Fluida ideal sebenarnya tidak ada dalam kehidupan sehari-hari. Fluida ideal hanya model yang digunakan untuk membantu kita dalam menganalisis aliran fluida (fluida ideal ini yang kita pakai dalam pokok bahasan Fluida Dinamis).
Viskositas suatu fluida adalah sifat yang menunjukkan besar dan kecilnya tahan dalam fluida terhadap gesekan. Fluida yang mempunyai viskositas rendah, misalnya air mempunyai tahanan dalam terhadap gesekan yang lebih kecil dibandingkan dengan fluida yang mempunyai viskositas yang lebih besar.
2.2.1 Alat Ukur Viskositas
Pengukuran nilai viskositas dilakukan dengan menggunakan alat yang dikenal dengan nama viskosimeter. Ada banyak berbagai jenis viskosimeter termasuk viskosimeter digital yang akan kita rancang. Namun dalam perancangan alat yang akan dibuat sebagai bahan teori digunakan dua jenis viskosimeter yang ditemukan berada di PTKI yaitu :
a) Viskosimeter Fenske no 100
Viskosimter ini merupakan viskosimeter dengan diameter tabung yang kecil dan berguna untuk mengukur nilai viskositas fluida dengan kondisi kekentalannya kecil.
(a) (b) Gambar 2.1 a. Tabung Thermobus
b. Viskometer Fenske no 100
Tabung ini memiliki ketetapan factor kali yaitu K1= 0,0177 dan K2= 0,0132.
Adapun langkah-langkah untuk pengukuran nilai viskositas dengan menggunakan alat ukur ini adalah sebagai berikut :
1. Ditentukan terlebih dahulu massa jenis (ρ) dari sampel yang akan diuji
2. Ditentukan suhu pengukuran (dalam percobaan kali ini digunakan suhu kamar) dengan kata lain tidak ada proses pemanasan/pendinginan 3. Fluida dimasukkan ke dalam tabung Fenske no 100 tepat pada titik a
hingga penuh, kemudian tabung dimasukkan ke thermobus dalam keadaan berdiri namun kondisi terbalik.
4. Dibiarkan fluida mengalir, tepat pada garis nomor (1) kedua stopwatch dihidupkan untuk menentukan waktu laju alir.
5. Stopwatch pertama dihentikan dan dicatat waktu alir pertama (t1) ketika
fluida telah tepat berada pada garis nomor (2) untuk menentukan KV1
6. Stopwatch kedua dihentikan dan dicatat waktu alir kedua(t2) ketika fluida
telah tepat berada garis nomor (3) untuk menentukan KV2 (K.t2) satuan
mm2/s (Cst)
7. Kemudian ditentukan nilai rata-rata untuk KV(KV1+ KV2)/2 satuan
mm2/s (Cst)
8. Ditentukan nilai viskositas (ŋ)yaitu perkalian KV rata-rata terhadap massa jenis fluida dengan satuan cP (centi poise)
9. Dilakukan percobaan sebanyak tiga kali untuk mendapatkan data (nilai) viskositas yang lebih akurat dan ditentukan nilai viskositas (ŋ) rata -ratanya.
b) Viskosimeter Ostwald
Viskosimter ini merupakan viskosimeter dengan diameter tabung yang lebih besar dan berguna untuk mengukur nilai viskositas fluida dengan kondisi kekentalannya lebih besar.
Gambar 2.2 a. Tabung Thermobus b. Viskometer Ostwald
Metode pengukuran dengan menggunakan viskosimeter ini adalah dengan menentukan terlebih dahulu faktor pembanding yaitu kondisi viskositas air. Dengan kata lain untuk mengukur nilai viskositas suatu fluida kita terlebih dahulu mengukur nilai waktu alir air dan mengetahui ketetapan nilai viskositas air pada kondisi (suhu) tertentu. Pengukuran yang dilakukan adalah pada suhu kamar, dalam arti tidak ada proses pemanasan/pendinginan. Adapun langkah-langkah untuk menentukan nilai viskositas fluida adalah sesuai dengan prosedur berikut ini :
1. Ditentukan terlebih dahulu massa jenis air dan fluida yang akan diukur nilai viskositasnya.
2. Air dimasukkan ke dalam tabung viskosimeter tepat pada titik a hingga cembungan titik a tersebut terisi penuh.
3. Kemudian dipasangkan Saffty pipet pada ujung viskosimeter dengan posisi tetap seperti gambar 2.2 (b), dihisap air dalam tabung viskosimeter hingga air berada pada cembungan titik b.
4. Tabung viskosimeter kemudian dimasukkan ke dalam thermobus dalam keadaan berdiri sperti gambar 2.2 (b).
5. Dihidupkan stopwatch ketika aliran tepat berada pada garis 1 untuk menghitung waktu alir hingga air. Setelah seluruhnya ruang hampa (air secara menyeluruh) tepat berada pada garis 2 stopwatch dihentikan dan dicatat waktunya sebagai waktu alir air.
6. Dilakukan percobaan yang sama sebanyak tiga kali untuk menentukan waktu alir I, II, dan III.
7. Dialkukan percobaan kedua hingga keenam untuk jenis fluida yang akan diukur nilai viskositasnya.
8. Dilakukan perhitungan viskositas fluida dengan menggunakan persamaan berikut ini :
ŋ
ŋ
=
……….(2.2)Dengan : ŋ1= viskositas yang dicari
ρ1= massa jenis fluida yang dicari viskositasnya
ρ2= massa jenis air (dalam suhu kamar 300C = 0,99564 gr/ml)
t1= waktu alir fluida yang dicari viskositasnya
t2= waktu alir air.
Kedua hasil pengukuran yaitu dengan menggunakan tabung Fenske no 100 dan tabung Ostwald seperti yang terlampir dalam lampiran menjadi nilai viskositas secara teori pada perancangan alat.
2.3 Pengenalan Mikrokontroler AVR ATMega8535
Mikrokontroler yaitu teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang yang kecil, dapat digunakan untuk membuat suatu aplikasi. Pada mikrokontroler, program 13olynom disimpan dalam ROM yang ukurannya 13olynomi lebih besar, sementara RAM digunakan sebagai tempat penyimpanan sementara, termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan. Pada sistem 13olynomi perbandingan RAM dan ROM nya besar, artinya program pengguna disimpan dalam ruang RAM yang relative besar, sedangkan rutin-rutin antar muka perangkat keras disimpan dalam ROM yang sangat kecil. Sedangkan pada mikrokontroler perbandingan RAM dan ROM nya yang besar artinya program control disimpan dalam ROM yang ukurannya 13olynomi besar sedangkan RAM digunakan sebagai tempat penyimpanan sementara termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan.
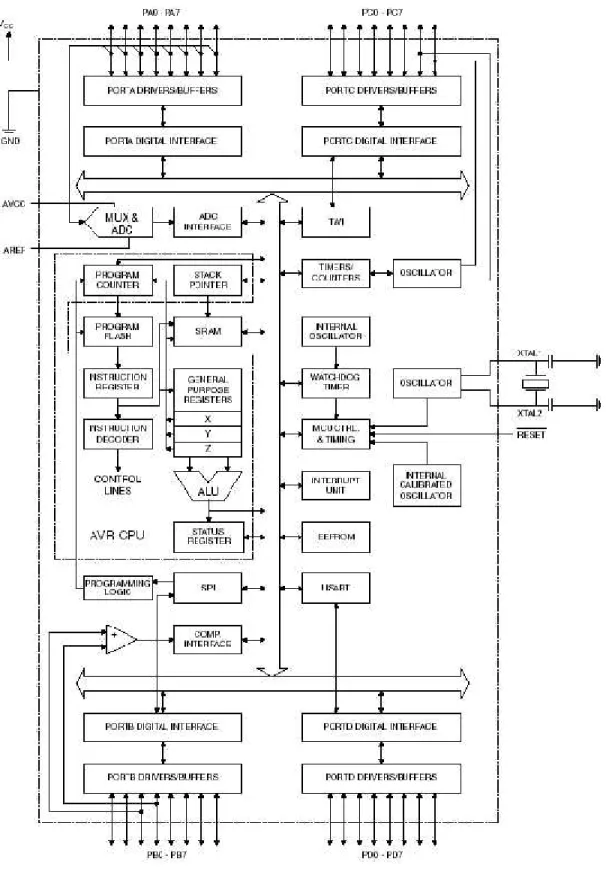
2.3.1 Arsitektur Mikrokontroler AVR ATMega 8535
Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua intruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Selain itu AVR berteknologi RISC (Reduced Instruction Set Computing).
Secara garis besar arsitektur mikrokontroler ATMega8535 memiliki bagian sebagai berikut :
1. Saluran I/O sebanyak 32 buah ysng terdiri dari 4 port yakni (port A, port B, port C, port D)
2. ADC 10 bit (8 pin di port A.0 s/d port A.7)
3. 3 buah timer/counter dengan kemampuan pembandingan. 4. SRAM sebesar 512 byte.
5. Memori flash sebesar 8 kb dengan kemampuan Read While Write 6. EEPROM 512 byte yang dapat deprogram saat operasi.
7. Antarmuka komparator analog.
8. Port USART antar komunikasi serial dengan kecepatan maksimal 2,5 Mbps.
9. Unit interupsi internal dan eksternal. 10. 4 channel PWM
11. Watchdog Timer dengan osilator internal. 12. Port antarmuka SPI8535
13. 6 sleep modes (Idle, ADC Noise Reduction, Save, Power-Down, Standby and Extended Standby) untuk penghematan daya listrik.
2.3.2. Konfigurasi Pin Mikrokontroler AVR ATMega 8535
Berikut dijelaskan secara fungsional konfigurasi Pin mikrokontroler AVR ATMega8535 sebagai berikut :
1. VCC : merupakan pin yang berfungsi sebagai masukan pin catu daya. 2. GND : merupakan pin ground.
3. Port A (PA0..PA7 : merupakan pin I/O dua arah dan pin masukan ADC. 4. Port B (PB0..PB7) : merupakan pin I/O dua arah dan pin fungsi khusus,
yaitu timer/counter, komparator analog dan SPI.
5. Port C (PC0..PC7) : merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, input ADC dan Timer Oscilator.
6. Port D (PD0..PD7) : merupakan pin I/O dua arah dan pin fungsi khusus yaitu komparator analog, interupsi eksternal dan komunikasi serial. 7. RESET : merupakan pin yang digunakan untuk mereset mikrokontroler. 8. XTAL1 dan XTAL2 : merupakan pin masukan clock eksternal.
9. AVCC : merupakan pin masukan tegangan untuk ADC. 10. AREF : merupakan pin masukan tegangan referensi ADC.
Gambar 2.4 Konfigurasi pin Mikrokontroler ATMega8535
2.3.3 Deskripsi Pin-Pin pada Mikrokontroler ATMega8535 :
2.3.3.1 Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat 17olyno arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
2.3.3.2 Port B
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat 18olyno arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut.
Tabel 2.1 Fungsi Pin-pin Port B Port Pin Fungsi Khusus
PB0 T0 = timer/counter 0 external counter input PB1 T1 = timer/counter 0 external counter input PB2 AIN0 = analog comparator positive input PB3 AIN1 = analog comparator negative input PB4 SS = SPI slave select input
PB5 MOSI = SPI bus master output / slave input PB6 MISO = SPI bus master input / slave output PB7 SCK = SPI bus serial clock
2.3.3.3 Port C
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7) juga memiliki fungsi 18olynomial18 sebagai oscillator untuk timer/counter 2.
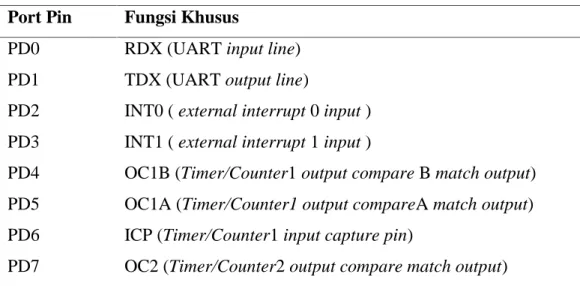
2.3.3.4 Port D
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut.
Tabel 2.2 Fungsi Pin-pin Port D Port Pin Fungsi Khusus
PD0 RDX (UART input line)
PD1 TDX (UART output line)
PD2 INT0 ( external interrupt 0 input ) PD3 INT1 ( external interrupt 1 input )
PD4 OC1B (Timer/Counter1 output compare B match output) PD5 OC1A (Timer/Counter1 output compareA match output) PD6 ICP (Timer/Counter1 input capture pin)
PD7 OC2 (Timer/Counter2 output compare match output)
2.3.3.5. RESET (Reset input)
RESET (RST) pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka sistem ini akan di-reset.
2.3.3.6. XTAL1 (Input Oscillator)
XTAL 1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
2.3.3.7. XTAL2 (Output Oscillator)
2.3.3.8.AVCC
AVCC adalah pin penyedia tegangan untuk port A dan A/D converter. Pin ini harus secara eksternal terhubung ke Vcc melalui low pass filter.
2.3.3.9.AREF
AREF adalah pin referensi analog untuk A/D converter.
2.3.3.10.AGND
AGND adalah kaki untuk analog ground
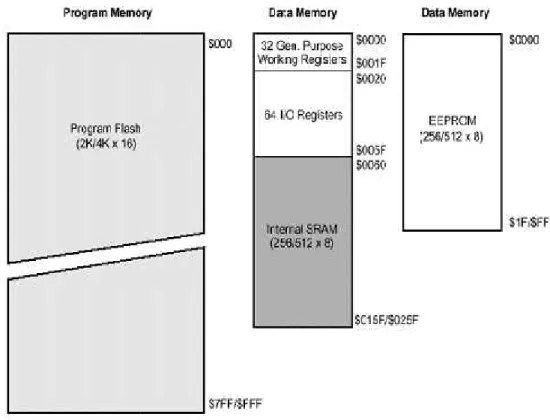
2.3.4 Peta Memori ATMega8535
AVR ATMega 8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi 3 bagian yaitu 32 register umum, 64 register I/O dan 512 byte SRAM internal. Register untuk keperluan umum menempati space data pada alamat terbawah yaitu $00 sampai $1F. Sementara itu register khusus untuk menangani I/O dan kontrol terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 sampai $5F. Register tersebut merupakan register yang khusus digunakan untuk mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti kontrol register, timer/counter, fungsi fungsi I/O, dan sebagainya. Register khusus alamat memori secara lengkap dapat dilihat pada tabel dibawah . Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F.
Gambar 2.5 Memori ATMega8535
Selain itu AVR Atmega8535 juga memilki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.3.5 Status Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2.6 Status Register Gambar 2.5 Memori ATMega8535
Selain itu AVR Atmega8535 juga memilki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.3.5 Status Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2.6 Status Register Gambar 2.5 Memori ATMega8535
Selain itu AVR Atmega8535 juga memilki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.3.5 Status Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
1. Bit7 I (Global Interrupt Enable), Bit harus di Set untuk meng-enable semua jenis interupsi.
2. Bit6 T (Bit Copy Storage), Instruksi BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit T dapat disalin kembali kesuatu bit dalam register GPR dengan menggunakan instruksi BLD.
3. Bi5H (Half Cary Flag)
4. Bit4 S (Sign Bit) merupakan hasil operasi EOR antara flag –N (negative) dan flag V (complement overflow).
5. Bit3 V (Two’s Component Overflow Flag) Bit ini berfungsi untuk mendukung operasi matematis.
6. Bit2 N (Negative Flag) Flag N akan menjadi Set, jika suatu operasi matematis menghasilkan bilangan negatif.
7. Bit1Z (Zero Flag) Bit ini akan menjadi set apabila hasil operasi matematis menghasilkan bilangan 0.
8. Bit0 C (Cary Flag) Bit ini akan menjadi set apabila suatu operasi menghasilkan carry.
2.3.6 Bahasa Pemrograman ATMega8535
Pemrograman mikrokontroler ATMega8535 dapat menggunakan low level language (assembly) dan high level language (C, Basic, Pascal, Java, dll) tergantung compiler yang digunakan. Bahasa Assembler mikrokontroler AVR memiliki kesamaan instruksi, sehingga jika pemrograman satu jenis mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis mikrokontroler AVR. Namun bahasa assembler relatif lebih sulit dipelajari dari pada bahasa C. Untuk pembuatan suatu proyek yang besar akan memakan waktu yang lama serta penulisan programnya akan panjang. Sedangkan
bahasa C memiliki keunggulan dibanding bahasa assembler yaitu independent terhadap hardware serta lebih mudah untuk menangani project yang besar.
Bahasa C memiliki keuntungan-keuntungan yang dimiliki bahasa assembler (bahasa mesin), hampir semua operasi yang dapat dilakukan oleh bahasa mesin, dapat dilakukan dengan bahasa C dengan penyusunan program yang lebih sederhana dan mudah. Bahasa C terletak diantara bahasa pemrograman tingkat tinggi dan assembly.
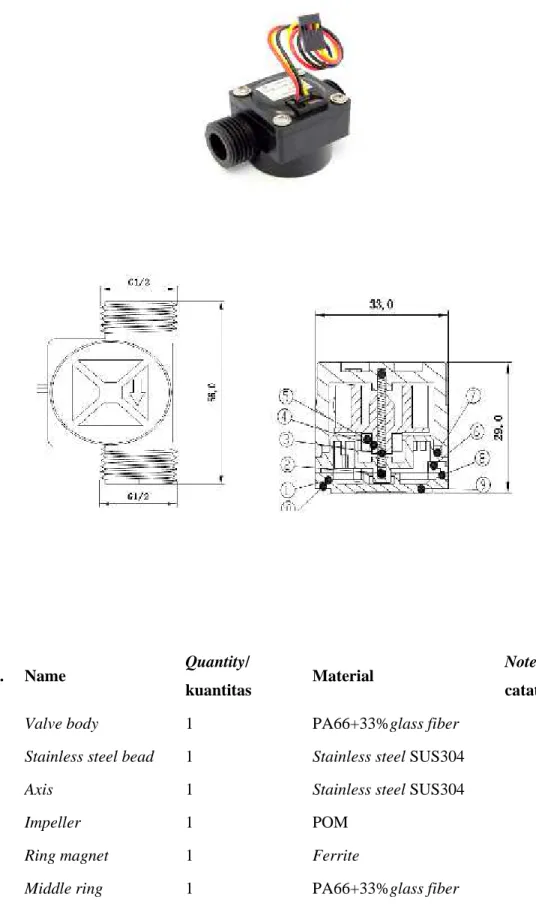
2.4 Water Flow Sensor G1/2
Sebuah sensor aliran adalah alat untuk merasakan laju aliran fluida. Biasanya sensor aliran elemen penginderaan digunakan dalam flow meter, atau aliran logger, untuk merekam aliran cairan. Seperti yang terjadi pada semua sensor, akurasi mutlak pengukuran memerlukan fungsi untuk kalibrasi. Ada berbagai jenis sensor aliran dan aliran meter, termasuk beberapa yang memiliki baling-baling yang didorong oleh cairan, dan dapat mendorong potensiometer putar, atau perangkat sejenis. Sensor aliran lain didasarkan pada sensor yang mengukur transfer panas yang disebabkan oleh media bergerak. Prinsip ini umum untuk mikrosensor untuk mengukur aliran.
Flow meter yang terkait dengan perangkat yang disebut velocimeters yang mengukur untuk pengukuran aliran udara, tetapi untuk cairan, sering lebih mudah untuk mengukur aliran. Untuk cairan sering dikenal dengan sebutan water flow sensor. Water flow sensor terdiri dari tubuh katup 23olynom, rotor air, dan sensor hall efek. Ketika air mengalir melalui, gulungan rotor-rotor. Kecepatan perubahan dengan tingkat yang berbeda aliran. Sesuai sensor hall efek output sinyal pulsa. Kelebihan sensor ini adalah hanya membutuhkan 1 sinyal (SIG) selain jalur 5V dc dan Ground. Perhatikan gambar berikut:
Gambar 2.7 Water Flow Sensor G1/2
Gambar 2.8 Mechanic Dimensi Water Flow sensor G1/2
Table 2.3 Keterangan komponen sensor
No. Name Quantity/
kuantitas Material
Note/
catatan
1 Valve body 1 PA66+33%glass fiber
2 Stainless steel bead 1 Stainless steel SUS304
3 Axis 1 Stainless steel SUS304
4 Impeller 1 POM
5 Ring magnet 1 Ferrite
7 O-seal ring 1 Rubber
8 Electronic seal ring 1 Rubber
9 Cover 1 PA66+33%glass fiber
10 Screw 4 Stainless steel SUS304 3.0*11
11 Cable 1 1007 24AWG
2.4.1 Spesifikasi Sensor Flow
a. Bekerja pada tegangan 5V DC-24VDC b. Arus Maksimum saat ini 15 mA (DC 5V) c. Berat sensor 43 g
d. Tingkat Aliran rentang 0,5 ~ 60 L / menit e. Suhu Pengoperasian 0 ° C ~ 80 °
f. Operasi kelembaban 35% ~ 90% RH
g. Operasi tekanan bawah 1.75Mpa h. Store temperature -25°C~+80° i. Store humidity 25%~90%RH
Water flow sensor ini terdiri atas katup 25olynom, rotor air, dan sebuah sensor hall-effect. Prinsip kerja sensor ini adalah dengan memanfaatkan fenomena efek Hall. Efek Hall ini didasarkan pada efek medan 25olynomi terhadap partikel bermuatan yang bergerak. Ketika ada arus listrik yang mengalir pada divais efek Hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus arus listrik, pergerakan pembawa muatan akan berbelok ke salah satu sisi dan menghasilkan medan listrik. Medan listrik terus membesar hingga gaya Lorentz yang bekerja pada partikel menjadi nol. Perbedaan potensial antara kedua sisi divais tersebut disebut potensial Hall. Potensial Hall ini sebanding dengan medan magnet dan arus listrik yang melalui divais.
Pembacaan nilai aliran pada water flow sensor menggunakan prinsip efek hall yang mengkonversi dari besaran GGL menjadi bentuk pulsa. Proses pengkonversian
berlangsung dalam sensor. Adanya fluida yang mengalir pada sensor mengakibatkan kincir pada sensor akan berputar. Putaran pada kincir akan menimbulkan medan magnet pada kumparan yang terdapat pada water flow sensor. Medan magnet tersebut yang akan dikonversikan oleh efek Hall menjadi pulsa. Perlu diketahui putaran pada kincir sangat dipengaruhi oleh kekentalan fluida yang diairkan. Semakin kental fluida yang dialirkan maka akan semakin lambat putaran kincir sehingga frekuensi yang dihasilkan akan semakin kecil juga dalam bentuk high dan low demikian sebaliknya semakin cair fluida yang dialirkan amaka akan semakin cepat putaran kincir.
2.5 Interpolasi Lagrange
Analisa yang digunakan pada program adalah dengan menentukan suatu titik temu dari beberapa jenis data yang dimasukkan dalam hal ini nilai viskositas teori terhadap banyaknya rotasi (rpsmax) fluida tersebut. Range data antara nilai maksimum
dan nilai minimum yang jauh berbeda dan tidak linear maka digunakan perhitungan dengan menggunakan metode numerik interpolasi langrange. Interpolasi Lagrange diterapkan untuk mendapatkan fungsi 26polynomial P(x) berderajat tertentu yang melewati sejumlah titik data. Misalnya, untuk mendapatkan fungsi 26polynomial berderajat satu yang melewati dua buah titik yaitu (x0, y0) dan (x1, y1). Ada beberapa
langkah yang harus dibuat sehingga diperoleh data hingga berorde tiga. Langkah pertama yang kita lakukan adalah mendefinisikan fungsi berikut :
Bentuk polinomial Newton order satu:
f1(x) = f (x0) + (x–x0) f [x1, x0] ...(2.3)
Pembagian beda hingga yang ada dalam persamaan di atas mempunyai bentuk: f [x1, x0] = 0 1 0 1) ( ) ( x x x f x f f [x1, x0] = 1 0 0 0 1 1) ( ) ( x x x f x x x f ...(2.4)
f1(x) = f (x0) + 0 1 0 x x x x f (x1) + 1 0 0 x x x x f (x0) ...(2.5)
Dengan mengelompokkan suku-suku di ruas kanan maka persamaan di atas menjadi: f1(x) = 1 0 0 1 0 1 0 x x x x x x x x f (x0) + 0 1 0 x x x x f (x1) atau f1(x) = 1 0 1 x x x x f (x0) + 0 1 0 x x x x f (x1) ………(2.6)
Persamaan (2.6) dikenal dengan interpolasi polinomial Lagrange order satu. Benar-benar melewati titik (x0, y0) dan (x1, y1). Persamaan tersebut berlaku untuk
berorde satu, dengan perhitungan yang sama akan dapat ditentukan untuk yang berorde dua sebagai berikut :
f1(x) = 1 0 1 x x x x 2 0 2 x x x x f (x0) + 0 1 0 x x x x 2 1 2 x x x x f (x1) + 0 2 0 x x x x 1 2 1 x x x x f (x2) ...(2.7)
Bentuk umum interpolasi polinomial Lagrange order n adalah: fn(x) = ( ) n 0 i i x L f (xi) ...(2.8) dengan Li(x) =
n i j j i j j 0 x x x x ...(2.9)Simbolmerupakan perkalian.
Dengan menggunakan persamaan (2.8) dan persamaan (2.9) dapat dihitung interpolasi Lagrange order yang lebih tinggi, misalnya untuk interpolasi Lagrange order 1, persamaan tersebut adalah:
f1(x) = L (x) 1 0
i i f (xi) = L0(x) f (x0) + L1(x) f (x1) ………(2.10)L0(x) = ) x x x x ( 1 0 1 L1(x) = ) x x x x ( 0 1 0
Sehingga bentuk interpolasi polinomial Lagrange order 1 adalah: f1(x) = ) x x x x ( 1 0 1 f (x0) + ) x x x x ( 0 1 0 f (x1) ………..(2.11)
Dengan menggunakan persamaan (2.8) dan persamaan (2.9) dapat dihitung pula interpolasi Lagrange order 2 adalah:
F2(x) = L (x) 2 0
i i f (xi) = L0(x) f (x0) + L1(x) f (x1) + L2(x) f (x2)…..(2.12) I=0 L0(x) = ) x x x x )( x x x x ( 2 0 2 1 0 1 I=1 L1(x) = ) x x x x )( x x x x ( 2 1 2 0 1 0 I=2 L2(x) = ) x x x x )( x x x x ( 1 2 1 0 2 0 Langkah kedua untuk memperoleh bentuk interpolasi polinomial Lagrange berorder 2 adalah: f2(x) = ) x x x x )( x x x x ( 2 0 2 1 0 1 f (x0) + ) x x x x )( x x x x ( 2 1 2 0 1 0 f (x1) + ) x x x x )( x x x x ( 1 2 1 0 2 0 f (x2) + ) x x x x )( x x x x ( 1 3 1 0 3 0 f (x3) …………(2.13)
Dengan menggunakan persamaan (2.8) dan persamaan (2.9) dapat dihitung pula interpolasi Lagrange order yang lebih tinggi, misalnya untuk interpolasi Lagrange order 3, persamaan tersebut adalah:
f3(x) = ( ) 3 0 i i x L f (xi) = L0(x) f (x0) + L1(x) f (x1) + L2(x) f (x2) + L3(x) f (x3) ....(2.14)
L0(x) = ( )( )( ) 3 0 3 2 0 2 1 0 1 x x x x x x x x x x x x L1(x) = ( )( )( ) 3 1 3 2 1 2 0 1 0 x x x x x x x x x x x x L2(x) = ( )( )( ) 3 2 3 1 2 1 0 2 0 x x x x x x x x x x x x L3(x) = ( )( )( ) 2 3 2 1 3 1 0 3 0 x x x x x x x x x x x x
Langkah ketiga bentuk interpolasi polinomial Lagrange order 3 adalah:
f3(x) = ( )( )( ) 3 0 3 2 0 2 1 0 1 x x x x x x x x x x x x f (x0) + ( )( )( ) 3 1 3 2 1 2 0 1 0 x x x x x x x x x x x x f (x1) + ( )( )( ) 3 2 3 1 2 1 0 2 0 x x x x x x x x x x x x f (x2) + ( )( )( ) 2 3 2 1 3 1 0 3 0 x x x x x x x x x x x x f (x3) ...(2.15)
Pada perancangan alat yang akan digunakan interpolasi langrange dengan berorde 3. Dengan keterangan x0, x1, x2, x3merupakan banyaknya putaran maksimum
yang dihasilkan oleh sensor untuk setiap fluida sedangkan f (x0) , f (x1), f (x2), dan f
(x3) merupakan nilai viskositas untuk setiap sampel pada setiap putarannya yakni