Prototipe Robot Line Follower untuk Simulasi Taksi Wisata
Otomatis Kota Medan Menggunakan Algoritma Fuzzy
Akhiruddin Nur
1, Poltak Sihombing
2, Dahlan Sitompul
3Program Studi S1 Ilmu Komputer Fakultas Ilmu Komputer dan Teknologi Informasi
Universitas Sumatera Utara
1akhi.young2@gmail.com,2poltak@usu.ac.id,3drps62@yahoo.com
Abstrak— Robot Line Follower adalah robot yang
dirancang untuk dapat berjalan mengikuti garis sebuah alur mapping tertentu. Robot taksi wisata kota ini merupakan robot yang dirancang untuk menggantikan kendaraan wisata yang masih menggunakan tenaga manusia sebagai pengendali. Robot ini memiliki kemampuan untuk berjalan dan mengantarkan penumpang dari satu tempat wisata ke tempat wisata lainnya secara otomatis dengan input tujuannnya menggunakan smartphone. Pada penelitian ini robot taksi wisata menggunakan mikrokontroler ATMega8 sebagai pengendali dan menggunakan bahasa pemrograman C untuk membuat program utama pada robot dan menggunakan pemrograman java untuk membuat aplikasi Android di smartphone sebagai media input tujuan taksi. Hasil yang diperoleh dari penelitian ini adalah robot bergerak mengikuti jalur taksi wisata Kota Medan dari satu titik ke titik lainnya sesuai dengan input tujuan dari smartphone.
Kata kunci:
:
Line Follower, ATMega8, Taksi Otomatis, Android Remote.I. PENDAHULUAN
A. Latar Belakang
Teknologi canggih dan cerdas yang sangat berkembang pesat pada masa sekarang ini adalah teknologi robotika dan
teknologi smartphone. Robot dapat digunakan untuk
membantu mempermudah pekerjaan manusia yang bersifat terus-menerus dan cenderung membosankan sedangkan
smartphone digunakan untuk menunjang mobilitas seseorang. Robot sudah banyak diciptakan untuk membantu manusia di segala bidang aplikasi. Hampir di semua kalangan membutuhkan robot untuk menunjang aktifitasnya. Salah satu
modelnya adalah robot pengikut garis (line follower robot)
yang merupakan sebuah robot bergerak otonom yang banyak dirancang baik untuk penelitian dan kompetisi robot. Sesuai
dengan namanya, line follower robot akan bergerak secara
otomatis mengikuti jalur atau lintasan yang telah dibentuk sedemikian rupa menyerupai peta suatu daerah.
Algoritma yang biasa digunakan pada line follower robot
adalah algoritma kabur (Fuzzy). Algoritma ini dapat diimplementasikan dalam sensor yang digunakan untuk
membaca keaadaan line (garis). Pembacaan garis inilah yang
akan menghasilkan logika untuk dieksekusi mikrokontroler.
Sedangkan teknologi smartphone sendiri juga memiliki
perkembangan yang begitu pesat terlebih dengan adanya
sistem operasi Android yang pemrogramannya bersifat open
source. Salah satu fitur dari smartphone android adalah kemampuan komunikasi jarak jauh tanpa kabel dalam hal ini
dapat menggunakan koneksi Bluetooth.
Berdasarkan hal-hal yang sudah dijelaskan diatas maka dirasakan perlu untuk menciptakan sebuah prototipe robot
line follower yang berbentuk taksi wisata tanpa supir yang dapat berjalan secara otomatis dari suatu tempat wisata menuju tempat wisata yang lain dalam sebuah kota, yang mana target tujuan dari taksi berdasarkan pada inputan penumpang menggunakan aplikasi android yang dimiliki oleh penumpang taksi itu sendiri.
B. Rumusan Masalah
Berdasarkan latar belakang, maka rumusan masalah yang ada pada penelitian ini adalah bagaimana cara membuat sebuah prototipe robot line follower berbentuk taksi wisata otomatis ke tempat-tempat wisata di Kota Medan yang mampu mengantarkan penumpang ke tempat wisata tujuan mereka secara otomatis berdasarkan input yang diberikan dari smartphone Android mengikuti jalur atau lintasan yang telah ditentukan, menggunakan algoritma Fuzzy.
C. Batasan Masalah
Adapun batasan masalah dalam penelitian ini adalah sebagai berikut:
1. Sistem yang akan dibangun hanya meliputi
mikrokontroler ATMega8, motor DC, driver motor,
Roda, danSensor Infrared.
2. Robot yang dibuat hanya akan berjalan di area yang
telah ditentukan berupa mapping lintasan miniatur
Kota Medan yang dibuat dengan garis berwarna hitam dan latar berwarna putih.
3. Robot hanya menerima input lintasan garis dan stop
marker yang diterima sensor.
4. Nilai bacaan sensor infrared dipengaruhi oleh cahaya
pada sekitar robot.
5. Tempat wisata yang menjadi tujuan wisata hanya
menggunakan 10 (sepuluh) tempat tujuan wisata di Kota Medan.
6. Tidak membahas tentang mencari lintasan terpendek.
7. Tidak membahas proses komunikasi serial antara
D. Tujuan Penelitian
Tujuan penelitian ini adalah untuk menciptakan sebuah
prototipe robot line follower berbentuk taksi wisata yang
mampu bergerak secara otomatis menuju tempat-tempat wisata di Kota Medan yang target tujuannya berdasarkan input dari aplikasi android oleh penumpangnya sendiri yang berjalan sesuai lintasan yang sudah ditentukan menggunakan algoritma Fuzzy.
E. Manfaat Penelitian
Manfaat yang didapat dari penelitian ini adalah :
1. Menghasilkan perangkat keras berupa berupa robot
line follower taksi wisata otomatis yang target tujuannya berdasarkan input dari aplikasi android
dikendalikan oleh mikrokontrolerbATMega8
menggunakan algoritma Fuzzy.
2. Menjadi bahan rujukan pada penelitian lain dalam
bidang mikrokontrolerdan robot line follower.
II. TINJAUAN PUSTAKA
A. Line Follower Robot (Robot Pengikut Garis)
Line follower robot adalah robot yang dirancang untuk dapat
berjalan mengikuti garis sebuah alur mapping tertentu,
biasanya garis yang dipakai berwana hitam atau putih [3] .
Beberapa hal yang perlu dalam merancang line follower robot
ini adalah mekanika, elektronik, dan algoritma (software) dari
robot.
Line follower robot yang akan dibangun menggunakan dua motor penggerak dan sekaligus sebagai motor pengemudi,
yaitu berupa motor kanan dan motor kiri, photosensor sebagai
pendeteksi garis, modul bluetooth sebagai penerima input, dan main board yang terdiri dari mikrokontroler ATMega8 dan driver motor DC L293D.
B. Logika Fuzzy
Prof. Lotfi A. Zadeh adalah seorang peneliti dari Universitas California yang pertama kali mengembangkan logika Fuzzy pada tahun 1960-an. Landasan pengembangan logika Fuzzy pada saat itu adalah berasal dari himpunan Fuzzy. Menurut Lotfi A. Zadeh, tujuan utama dari logika fuzzy adalah untuk membentuk dasar teoritis untuk penalaran tentang proposisi tidak tepat yang mana penalaran seperti ini disebut sebagai penalaran perkiraan [11].
Secara bahasa, Fuzzy diartikan sebagai kabur atau samar-samar. Suatu nilai dapat bernilai benar atau salah pada waktu bersamaan. Dalam Fuzzy dikenal derajat keanggotaan yang memiliki rentang nilai 0 (nol) hingga 1 (satu). Berbeda dengan himpunan tegas yang memiliki nilai 1 atau 0 [13].
Logika Fuzzy adalah suatu logika yang mempunyai nilai kekaburan atau kesamaran (Fuzzyness) antara benar atau salah. Dalam teori logika Fuzzy suatu nilai bisa bernilai benar atau salah secara bersama. Namun nilai kebenaran dan kesalahan tersebut bergantung pada bobot keanggotaan yang
dimilikinya. Logika Fuzzy memiliki derajat keanggotaan dalam rentang 0 hingga 1. Berbeda dengan logika digital yang hanya memiliki dua nilai 1 atau 0. Logika Fuzzy digunakan untuk menterjemahkan suatu besaran yang diekspresikan menggunakan bahasa (linguistic), misalkan besaran kecepatan laju kendaraan yang diekspresikan dengan lambat, agak cepat, cepat, dan sangat cepat. Logika Fuzzy menunjukan sejauh mana suatu nilai itu benar dan salah.
C. Mikrokontroler ATMega8
Mikrokontroler adalah elemen kunci dalam semua embedded
system, pengendalian dan otomasi. Mikrokontroler memiliki
unit pengolahan, memori, perangkat I/O, timer, pengkonversi
data, port serial dan lain-lain [4].
Mikrokontroller AVR (Alf and Vegard’s Risc
Processor) merupakan pengontrol utama standar industri dan riset saat ini. Hal ini dikarenakan berbagai kelebihan yang dimilikinya dibandingkan mikroprosesor, antara lain murah,
dukungan software dan dokumentasi yang memadai, dan
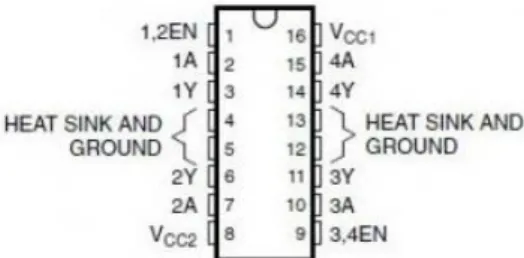
memerlukan komponen pendukung yang sangat sedikit[2]. Pada penelitian ini mikrokontroler yang digunakan adalah keluaran Atmel AVR jenis ATMega8 yang memiliki konfigurasi pin seperti terlihat pada Gambar 1. Beberapa fitur
dari mikrokontroler ATMega8 yang dikutip dari datasheet
-nyaadalah sebagai berikut :
1. Performa tinggi, mikrokontroler berdaya rendah.
2. Mikrokontroler dengan arsitektur RISC advance.
3. 130 kode instruksi dalam bahasa assembly, hampir
semua membutuhkan satu clock untuk eksekusi.
4. Mempunyai 32 x 8 bit General Purpose Working
Register.
5. Pengoprasian full static, artinya clock dapat
diperlambat, bahkan dihentikan sehingga chip berada dalam kondisi sleep. CMOS juga lebih tahan terhadap noise.
6. Kecepatan mengeksekusi sampai dengan 16 mega
instruksi per detik pada saat diberikan osilator sebesar 16 MHZ.
7. Terdapat rangkaian pengali 2(dua) untuk siklus
kerjanya di dalam chip.
8. Flash ROM sebesar 8 Kilobyte yang dapat diprogram
ulang.
9. Ketahanan hapus-tulis Flash ROM adalah 10.000
kali.
10.Memori SRAM sebesar 1 kilobyte yang dapat
dihapus-tulis 100.000 kali.
11.Penguncian kode program untuk keamanan
perangakat lunak agar tidak dapat dibaca.
12.Memori yang non-volatile EEPROM sebesar 512
byte.
13.Memiliki 2 buah timer/counter 8 bit sebanyak 2 buah
dan sebuah timer/counter 16 bit dengan opsi PWM sebanyak 3 kanal.
14.Memiliki 8 kanal Analog to Digital Converter 10 bit
dengan jenis single ended.
15.Antarmuka komunikasi serial USART yang dapat
Gambar 1. Konfigurasi Pin ATMega8
D. Aktuator
Aktuator merupakan bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator
biasanya merupakan piranti elektromekanik yang
menghasilkan gaya gerakan. Aktuator terdiri dari 2 jenis, yaitu :
1. Aktuator elektrik
2. Aktuator pneumatik dan hidrolik.
Pada penelitian ini aktuator yang akan digunakan adalah
aktuator elektrik yang berupa motor DC. Motor DC (direct
current) adalah pelaratan elektromekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik yang desain awalnya diperkenalkan oleh Michael Faraday lebih dari seabad yang lalu [8].
Motor DC memiliki kecepatan putar yang cukup tinggi dan sangat cocok digunakan untuk roda robot yang membutuhkan kecepatan gerak yang tinggi. Pada penelitian
ini motor DC digunakan sebagai penggerak utama robot line
follower.
Driver Motor L293D adalah IC yang dirancang khusus
sebagai driver motor DC dan dapat dikendalikan dengan
mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya.
Sehingga dapat digunakan untuk membuat driver H-bridge
untuk 2 buah motor DC. Konstruksi pin driver motor L293D dapat dilihat pada Gambar 2.
Gambar 2. Konstruksi Pin IC L293D
E. Sensor Proximity
Robot line follower menggunakan sensor proximity yang
dapat digunakan untuk mendeteksi garis yang merupakan
pembimbing gerakan robot. Sensor proximity dapat dibuat
dari piranti yang terpisah, yaitu LED infra merah dan
photodiode. LED sebagai transmitter, sedangkan photodiode
sebagai receiver atau sensornya [9].
Gambar 3. Cara Kerja Sensor Garis
Terlihat pada Gambar 3 cara kerja dari sensor garis. Pada gambar sebelah kiri IRED memancarkan sinar infra merah pada bidang berwarna putih (cerah), sinar inframerah akan
dipantulkan atau diteruskan untuk diterima photodiode.
Sedangkan pada gambar sebelah kanan terlihat sinar diserap oleh bidang berwarna hitam (gelap).
F. Modul Bluetooth HC05
Pada penelitian ini, modul bluetooth digunakan sebagai media
komunikasi antara smartphone dengan mikrokontroler. Modul
Bluetooth yang digunakan adalah jenis HC-05 yang merupakan modul komunikasi nirkabel pada frekuensi
2.4GHz dengan pilihan koneksi sebagai slave, ataupun
sebagai master. Modul Bluetooth HC-05 dapat digunakan
dengan mikrokontroler untuk membuat aplikasi wireless.
Interface yang digunakan adalah serial RXD, TXD, VCC dan
GND. Built-in LED sebagai indikator koneksi bluetooth.
Bentuk fisik Modul Bluetooth HC05 dapat dilihat pada
Gambar 4.
Gambar 4. Modul Bluetooth HC05
Tegangan input antara 3.6 ~ 6V, tidak dapat dihubungkan dengan sumber daya lebih dari 7 Volt. Arus saat
unpaired sekitar 30mA, dan saat paired (terhubung) sebesar 10mA. 4 pin interface 3.3V dapat langsung dihubungkan ke berbagai macam mikrokontroler. Jarak efektif jangkauan sebesar 10 meter, meskipun dapat mencapai lebih dari 10
meter, namun kualitas koneksi makin berkurang. Berikut beberapa fitur dari HC05 [12]:
1. Memiliki port serial bluetooth nirkabel.
2. Memiliki regulator yang bekerja dengan baik.
Pengguna dapat menghubungkan 3,3 untuk 5V DC dan menghubungkan TX dan RX untuk mengontrol I/O.
3. Mudah menghubungkan modul ini dengan PC
dengan hanya memasukkan kode “1234”.
4. Memiliki LED indikator sebagai penanda status
koneksi bluetooth.
III. ANALISIS DAN PERANCANGAN
A. Analisis Masalah
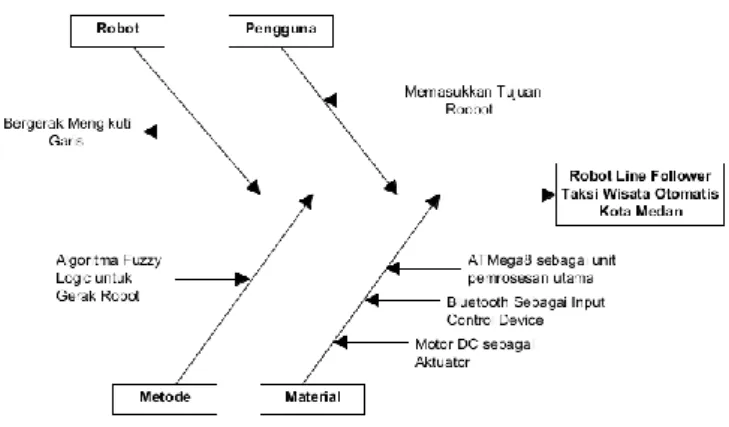
Diagram Ishikawa digunakan untuk mengidentifikasi
masalah. Diagram Ishikawa adalah sebuah alat grafis yang
digunakan untuk mengidentifikasi, mengeksplorasi dan menggambarkan masalah serta sebab dan akibat dari masalah tersebut. Ini sering disebut juga diagram sebab – akibat atau
diagram tulang ikan (fishbone diagram).
Masalah yang biasa terjadi pada robot line follower
adalah tidak bisanya robot untuk menentukan lintasan mana yang akan dijalaninya dan dimana robot seharusnya berhenti.
Secara umum robot line follower akan bergerak secara acak
mengikuti garis yang diterima oleh sensor, sehingga robot sangat sulit untuk menentukan lokasi tempat pemberhentian robot. Masalah-masalah yang ada dapat dilihat pada Gambar 5.
Gambar 5. Ishikawa diagram
B. Perancangan 1) Konstruksi Utama
Kerangka adalah konstruksi yang nantinya akan menentukan desain, bentuk dan ukuran dari komponen fisik lainnya. Fungsi utama dari kerangka adalah sebagai tempat atau kedudukan untuk seluruh komponen robot.
Pemilihan material akan sangat berpengaruh terhadap konstruksi robot seperti berat, kekuatan, ketahananan terhadap keretakan dan kemampuan meredam getaran. Perpaduan diantaranya akan menghasilkan konstruksi yang kuat.
Kerangka robot Line Follower dirancang menggunakan
bahan plastik keras (acrilyc) karena mudah dalam
pengerjaannya, kuat, tidak mudah retak dan mudah didapat. Rancangan kerangka robot dapat dilihat pada Gambar 6.
Gambar 6. Perancangan Kerangka Robot
3) Perancangan Sensor Robot
Sensor proximity berfungsi sebagai alat yang digunakan untuk
membaca garis hitam dan garis putih. Garis hitam yang
terbaca oleh sensor akan menghasilkan nilai logika “1” (high),
sedangkan garis putih yang diterima sensor akan
menghasilkan nilai logika “0” (low).
Sensor proximity yang digunakan berjumlah delapan
pasang, dengan letak sensor empat buah di sebelah kiri dan empat buah di sebelah kanan dengan posisi masing-masing sensor seperti terlihat pada Gambar 7.
Gambar 7. Rancangan sensor Proximity Pada PCB
4) Perancangan Lintasan Robot
Pada perancangan sistem, data peta yang digunakan adalah peta tempat wiasata di Kota Medan yang diperoleh dari
Google Earth seperti terlihat pada Tabel 1. Setiap jalan yang di lewati oleh taksi diberi warna hitam, 10 titik tempat wisata akan diberi kotak berwarna hitam dan untuk tempat yang lain di peta diberi warna putih.. Rancanngan lintasan Taksi Wisata Kota Medan dapat dilihat pada Gambar 8.
Tabel 1. Tabel Tempat Wisata Kota Medan
No. Nama Tempat Wisata Nama Jalan
1. Simalingkar Zoo Jl. Bunga Rampai IV
2. Taman Buaya Asam
Kumbang
Jl. Bunga Raya 2 No. 59
3. Tjong A Fie Jl. Jend. Ahmad Yani
4. Masjid Raya Jl. Sisingamangaraja
5. Istana Maimun Jl. Dr. A Sofyan
6. Museum Negeri
Sumut
Jl. H. M. Joni No. 51
7. Taman Budaya Jl. Perintis
Kemerdekaan No.33
8. Rahmat Gallery Jl. S. Parman No.309
9. Lapangan Merdeka Jl. Bukit Barisan
10. Danau Siombak Paya Pasir Medan
Marelan
Gambar 8. Rancangan Lintasan Robot
6) Perancangan Perangkat Lunak
Flowchart sistem dapat dilihat pada gambar 10 berikut :
Gambar 10. Flowchart Robot
IV. IMPLEMENTASI DAN PENGUJIAN
A. Implementasi
1) Implementasi Kerangka Robot
Kerangka robot line follower diimplementasikan
menggunakan bahan acrilyc dengan ketebalan 3 mm. Acrilyc
terbuat bahan yang cukup kuat, relatif ringan, mudah dalam pengerjaannnya serta mudah didapat. Secara keseluruhan bahan yang digunakan untuk membuat kerangka robot adalah
acrilyc 3 mm, spacer berukuran 35 mm, baut dengan diameter 3 mm.
Kerangka robot dibuat dengan 1 tingkat untuk
menempatkan sensor proximity (bagian depan), rangkaian
sistem minimum ATMega8 (bagian tengah), driver motor
L293D (bagian belakang), regulator (bagian kanan) dan
battery (bagian belakang atas). Kerangka robot dapat dilihat pada Gambar 11.
Gambar 11. Kerangka Robot
2) Implementasi Rangkaian Sirkuit Elektronika
Rangkaian dasar yang digunakan untuk mengoperasikan sebuah mikrokontroler disebut sebagai rangkaian sistem minimum. Rangkaian sistem minimum terdiri dari rangkaian
osilator (cystal), sistem reset dan catu daya. Berdasarkan
rangkaian sistem minimum tersebut dibuat suatu board yang
berfungsi untuk menggabungkan fungsi dasar dan fungsi
pengendalian yaitu board mikrokontroler. Implementasi
board mikrokontroler dapat dilihat pada Gambar 12.
Gambar 12. Board Mikrokontroler
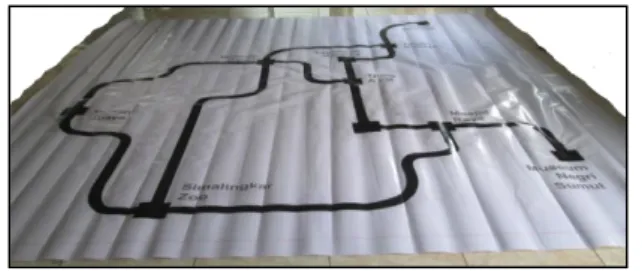
3) Implementasi Lintasan Robot
Implementasi lintasan robot dilakukan dengan dicetak atau
di-print pada spanduk. Ukuran lintasan setelah di-print adalah panjang 3 meter dan lebar 2,75 meter. Lintasan dibuat sesuai
dengan pemetaan yang telah dibahas pada bab sebelumnya dengan 10 titik tempat wisata. Implementasi lintasan robot dapat dilihat pada Gambar 13.
Gambar 13. Lintasan Robot
B. Pengujian
1) Pengujian Pergerakan Robot
Pengujian ini termasuk pengujian tahap akhir, dimana robot akan bergerak sesuai dengan hasil dari pembacaan sensor yang telah difuzzifikasikan kedalam fungsi keanggotaan oleh mikrokontroler ATMega8. Hasil Pengujian Pergerakan Robot dapat dilihat pada Tabel 2.
Tabel 2. Hasil Pengujian Aktuator
Input Sensor PWM Respon Gerak Robot Motor Kiri Motor Kanan 00111100 190 193 maju 00111000 190 193 maju 00011100 190 193 maju 00001100 190 193 belok kanan 00000100 190 193 belok kanan 00110000 190 193 belok kiri 00100000 190 193 belok kiri
V. KESIMPULAN DAN SARAN
A. Kesimpulan
Berdasarkan hasil dari implementasi dan pengujian
perancangan robot line follower taksi wisata kota Medan,
maka penulis mengambil kesimpulan bahwa Robot Line
Follower yang dibangun mampu berjalan mengikuti garis dan berhenti di titik hitam pemberhentian sesuai pembacaan sensor berdasarkan dengan Logika Fuzzy yang telah diterapkan.
B. Saran
Berikut beberapa saran yang penulis berikan untuk pengembangan lebih lanjut dari penelitian ini:
1. Robot taksi wisata kota Medan sebaiknya menggunakan
pemilihan rute terpendek dalam menuju tempat tujuan agar menghemat waktu perjalanan.
2. Robot Taksi wisata untuk selanjutya dikembakan tidak
menggunakan Line Follower lagi tetapi menggunakan
teknologi yang lebih baru lagi.
DAFTAR PUSTAKA
[1] Budiharto, W. 2010. Robotika Teori dan
Impelemtasi. Andi: Yogyakarta.
[2] Budiharto, W. & Firmansyah, S. 2010. Elektronika
Digital Dan Mikroprosesor. Edisi Kedua. Andi: Yogyakarta.
[3] Budiharto, W. 2011. Aneka Proyek Mikrokontroler
Panduan Utama untuk Riset/Tugas Akhir. Graha Ilmu: Yogyakarta.
[4] Dutta, S., et al. Atmega8 Based Multichannel Data
Acquisition System. International Journal of Computer Aplications in Engineering Science
(IJCAES). Volume IV. (Online)
http://caesjournals.org/spluploads/IJCAES-MICRO-2014-01.pdf (6 Maret 2016)
[5] Indiyanto, C. 2015. Robot Autopilot Line Follower
Berbasis Mikrokontroler ATMega32A Untuk Miniatur Bus Lintas USU. Skripsi. Universitas Sumatera Utara.
[6] Ma’ani, R. 2013. Perancangan Robot Line Follower
Sortir Benda Dengan Menggunakan Kamera.
Skripsi. Universitas Jember.
[7] Pitowarno, E. 2005. Mikroprosesor & Interfacing.
Andi: Yogyakarta.
[8] Pitowarno. E. 2006. Robotika: Desain, Kontrol, dan
Kecerdasan Buatan. Andi: Yogyakarta.
[9] Rachman, O. 2012. Panduan Praktis Membuat
Robotik Dengan Pemrograman C++. Andi:
Yogyakarta.
[10]Rahmansyah, M. F. 2014. Prototipe Robot Line
Follower Pengantar Makanan Berbasis Mikrokontroler ATMega32 Menggunakan Algoritma Fuzzy. Skripsi. Universitas Sumatera Utara.
[11]Ross, T. J. 2010. Fuzzy Logic With Engineering
Aplications. Third Edition. Wiley: United Kingdom.
[12]Saini, A.K., Sharma, G., & Choure, K.K. 2105.
BluBO : Bluetooth Controlled Robot. International Journal of Science and Research (IJSR). (Online) http://ijsr.net/conf/NCKITE2015/142.pdf (6 Maret 2016).
[13]Septiawan, V. 2010. Sistem Pendukung Keputusan
Penentuan Tujuan Wisata Menggunakan Logika Fuzzy dengan Metode Clustering Studi Kasus: Pulau Batam. Skripsi. Universitas Sumatera Utara.