AUTOMATIC COLLIS ION AVOIDANCE S YS TEM BAS E ON AIS DATA
IN WES T VOYAGE LIN ES OF S URABAYA
Dion Nuryahya
1), Dr. Ir. AA. Masroeri, MEng
1),Dr. Trika Pitana, ST, MSc
1),
Department of Marine Engineering, FTK-ITS Surabaya 1)
ABSTRACT
The number of accidents between ships in west voyage lines of Surabaya is primary cause to design a control system of collision avoidance on the ship. Various efforts have been made either by utilizing existing technology to automatically control the movement of the ships. In this study, it will be designed an automatic control system to avoid collisions between ships based on AIS data using a rule based of fuzzy logic controller. This system will control the speed and movement of the ship automatically using fuzzy logic. In the application, it will use an effective strategy for collision avoidance base on Automatic Identification System (AIS) data. Nowadays, number of AIS equipped ships is increasing, so that the marine traffic can be observed by AIS. Using AIS data, the ships speed, ships movement, and ships position can be known. The visualization of study will use the existing software programs visual basic 6.0, in which also apply the rules of international regulations on the prevention of collisions between ships. The simulation describe some scenario for collision between two ships, and the result of study shown that the developed system can work properly and the collision can be avoided and ships safety can be improved.
Key Words: Fuzzy Logic, Collision Avoidance, AIS
ABSTRAK
Banyaknya kasus kecelakaan antar kapal di perairan barat Surabaya melatarbelakangi suatu usaha untuk merancang suatu sistem kendali pada kapal agar dapat menghindari terjadinya tabrakan. Berbagai upaya telah dilakukan salah satunya dengan meman faatkan teknologi yang ada untuk mengendalikan pergerakan kapal secara oto matis. P ada penelitian ini akan dirancang sebuah sistem kendali otomatis untuk menghindari tabrakan kapal berdasarkan AIS data dengan menggunakan kaidah control berdasarkan logika fuzzy . Sistem ini akan mengontrol kecepatan serta gerakan kapal secara otomatis dengan menggunakan logika fuzzy. Dalam pengaplikasiannya akan meman faatkan data-data yang diperoleh dari Automatic Identification System (AIS). Dengan AIS ini dapat diperoleh data berupa identitas kap al, tingkat bahaya muatan, jalur pelayaran kapal, dan koordinat kapal. Visualisasi sistem ini akan menggunakan interface dari program perangkat lunak yang ada, yang didalamnya juga akan diaplikasikan peraturan peraturan internasional tentang pencegahan tabrakan antar kapal. Simulasi yang dilakukan menggambarkan beberapa scenario dua kapal yang berpotensi terjadinya tabrakan dan dari hasil simulasi tersebut didapatkan bahwa sistem yang dikembangkan dapat bekerja dengan baik dan tabrakan kapal bisa dihindari.
Kata Kunci
:
Logika Fuzzy, Collision Avoidance, AISPENDAHULUAN
sebagian besar wilayah Indonesia terdiri dari perairan yang menyebabkan Indonesia disebut sebagai negara maritim. Luas wilayah perairan Indonesia adalah sebesar 2/3 dari seluruh luas wilayah negara Indonesia. Kondisi ini yang menunjang transportasi barang dan orang antar pulau dilakukan melalui laut. Oleh karena itu diperlukan suatu sistem pengamanan bagi lalu lintas kapal pada jalur perairan yang sangat luas tersebut dengan menerapkan teknologi untuk menghindari tabrakan. Teknologi tersebut sangat dibutuhkan bagi setiap kapal dalam menyusuri jalur pelayarannya dan untuk menghindari terjadinya tabrakan antar kapal ketika terdapat perpotongan jalur yang dilakukan oleh kapal lain. P engendalian untuk menghindari tabrakan ini menerapkan teknologi anti collision (anti tabrakan) berbasis logika fuzzy pada sistem kendali kapal. Saat ini, pengembangan sistem navigasi kapal yang efektif dan aman telah meningkat. Hal ini terlihat dari berbagai penelitian dan pengembangan yang dilakukan oleh pemerintah maupun akademisi di lingkungan kampus. P enelitian dilakukan dalam upaya menciptakan sebuah sistem pengendalian otomatis yang dapat mengeliminir tingkat resiko kecelakaan dan ketidakakuratan sistem anti tabrakan dalam pelayaran.
Dengan peningkatan volume transportasi laut, maka kebutuhan untuk meningkatkan keamanan dan
efisiensi dari transportasi laut sangat dibutuhkan. P ernyataan ini diperkuat juga bahwa ternyata dalam kurun waktu 5 tahun terakhir ini telah banyak terjadi kecelakaan diantaranya adalah kapal tenggelam 41%, tabrakan kapal 11%, kebakaran 14%, permasalahan di mesin 3%, dan kebocoran kapal. Terjadinya beberapa kecelakaan kapal memerlukan suatu usaha untuk perancangan sistem kendali pada kapal tersebut untuk menghindari tabrakan dengan kapal lain atau benda asing sepanjang jalur yang dilalui oleh kapal tersebut. Salah satu yang terpenting berada pada sistem kendali anti collision (anti tabrakan) pada kapal tersebut.
Tubrukan yang terjadi dapat diminimalisir kemungkinannya, karena sekarang telah terdapat suatu system navigasi terpadu, yaitu AIS (Automatic identification System). AIS ini akan dipasangpada kapal-kapal guna me mbantu untuk proses navigasi, karena dengan AIS ini dapat diperoleh data-data penting untuk navigasi, misalnya kecepatan kapal, posisi kapal, serta identitas kapal. Oleh karena itu penulis mencoba me mbuat suatu sistem kendali otomatis yang inputannya berdasarkan data AIS. Sistem ini nantinya akan mengatur kecepatan serta olah gerak kapal (navigasi) jika akan mengalami tubrukan. Kontrol navigasi serta kecepatan ini merupakan hasil dari keputusan yang diambil berdasarkan inputan dari AIS (Automatic Identification System. Dalam hal ini penulis mencoba untuk membuat
system simulasi ini dengan menggunakan logika fuzzy P ada penelitian Tugas Akhir ini akan dilakukan perancangan system pengendalian transportasi laut di alur barat pelayaran Tanjung P erak Surabaya ( Karang Jamuang – Tanjung P erak ) berdasarkan AIS data dengan kaidah control berdasarkan logika fuzzy. P enelitian ini dilakukan dalam upaya menciptakan sebuah sistem pengendalian otomatis yang dapat mengurangi tingkat resiko kecelakaan dalam pelayaran.
TINJAUAN PUSTAKA
Aturan-aturan IMO Mengenai Tabrakan
Aturan-aturan IMO mengenai tabrakan merupakan peraturan internasional yang harus dipatuhi semua nahkoda kapal. Aturan-aturan itu adalah : 1. Aturan kanan (Rule of Right)
Jika dua buah kapal bertemu berhadap-hadapan maka keduanya harus memanuver kapalnya ke kanan dan jika sebuah kapal ingin mendahului kapal yang ada di depannya maka kapal kapal yang dibelakang me manuver kapalnya ke kanan sedangkan yang lainya ke kiri.
2. Kiri menang kanan kalah (W est is The Best, East is The Least)
Jika nahkoda kapal yang satu melihat kapal lain berada di kirinya maka nahkoda kapal tersebut diharuskan untuk lewat terlebih dahulu dan sebaliknya jika nahkoda yang satu melihat kapal yang lain berada dikanannya maka nahkoda kapal tersebut diharuskan untuk mengurangi kecepatannya dan menunggu kapal yang dilihat untuk lewat terlebih dahulu.
Konsep DasarLogika Fuzzy
Logika fuzzy yang pertama kali diperkenalkan oleh Lotfi A. Zadeh, me miliki derajat keanggotaan dalam rentang 0(nol) hingga 1(satu), berbeda dengan logika digital yang hanya memiliki dua nilai yaitu 1(satu) atau 0(nol). Logika fuzzy digunakan untuk menerjemahkan suatu besaran yang diekspresikan menggunakan bahasa (linguistic), misalkan besaran kecepatan laju kendaraan yang diekspresikan dengan pelan, agak cepat, cepat dan sangat cepat. Secara umum dalam sistem logika fuzzy terdapat empat buah elemen dasar, yaitu:
1. Basis kaidah (rule base), yang berisi aturan-aturan secara linguistik yang bersumber dari para pakar; 2. Suatu mekanisme pengambilan keputusan
(inference engine), yang memperagakan bagaimana para pakar mengambil suatu keputusan dengan menerapkan pengetahuan (knowledge);
3. P roses fuzzifikasi (fuzzification), yang mengubah besaran tegas (crisp) ke besaran fuzzy;
P roses defuzzifikasi (defuzzification), yang mengubah besaran fuzzy hasil dari inference engine, menjadi besaran tegas (crisp).
Automatic Identification System (AIS)
Automatic Identification System (AIS) merupakan sistem yang memungkinkan memonitor kapal dari kapal lainya maupun dari stasiun darat (Vessel Trafic Service), dan operasinya pada band frekwensi VHF. Selain itu juga AIS juga mempunyai karakteristik dan kemampuan untuk meningkatkan keselamatan bernavigasi dan efisiensi pengelolaan rambu – rambu kapal.
Stasiun AIS bertindak sebagai pemancar radio radio VHF yang mempu mengirimkan informasi tentang kapal serperti identititas, posisi, perjalanan, kecepatan, panjang kapal, tipe kapal, dan informasi muatan dll. Untuk semua kapal dan akan di terima kembaki ke darat untuk di cocokkan.
Gambar 1. Penerima AIS
International Maritime Organization (IMO) International Convetion for the Safety of Life at Sea (SOLAS) mewajibkan penggunaan AIS pada pelayaran kapal internasional dengan Gross Tonnage (GT) lebih dari sama dengan 300 GT, dan semua kapal penumpang tanpa memperhatikan segala ukuran. Hal itu diestimasikan pada lebih dari 40.000 kapal baru-baru ini me mpunyai peralatan AIS kelas A. Untuk sistem pelacakan jarak jauh pada kapal, tak sebanyak transmisi frekuensi yang bisa dicapai oleh LRIT (Long-Range Identification and Tracking System) pada kapal dagang di luar area pantai AIS (VHF atau A1) jarak Radio.
AIS yang digunakan pada peralatan navigasi yang penting untuk menghindari dari kecelakaan akibat tabrakan. Karena keterbatasan dari kemampuan radio, dan karena tidak semua kapal yang dilengkapi dengan AIS, sistem ini berarti yang diutamakan untuk digunakan sebagai alat peninjau dan untuk menghindarkan resiko dari tabrakan daripada sebagai sistem pencegah tabrakan secara otomatis, sesuai dengan International Regulations for P reventing Collisions at Sea (COLREGS).
Program Microsof t Visual B asic
Visual Basic merupakan salah satu bahasa pemrograman yang berbaris GUI (Graphic User
Intervace). Didalamnya berisi perintah-perintah atau instruksi yang dimengerti oleh komputer untuk melakukan tugas-tugas tertentu. Tugas-tugas tersebut dapat dijalankan apabila ada respon dari pemakai. Respon tersebut berupa kejadian/ event tertentu, misainya me milih tombol, memilih menu dan sebagainya (Abdul, 2004). Di dalam Visual Basic terdapat suatu development tools untuk membangun aplikasi dalam lingkungan Windows. Dalam pengembangan aplikasi, Visual Basic menggunakan pendekatan Visual untuk merancang user interface dalam bentuk form, sedangkan untuk kodingnya menggunakan dialek bahasa Basic yang cenderung mudah dipelajari. Visual Basic telah menjadi tools yang terkenal bagi para pemula maupun para developer dalam pengembangan aplikasi skala kecil sampai ke skala besar. Dalam lingkungan Window's User-interface sangat memegang peranan penting, karena dalam pemakaian aplikasi yang kita buat, pemakai
senantiasa berinteraksi dengan User-interface tanpa menyadari bahwa dibelakangnya berjalan instruksi-instruksi program yang mendukung tampilan dan proses yang dilakukan. P ada pemrograman Visual, pengembangan aplikasi dimulai dengan pembentukkan user interface, kemudian mengatur properti dari objek-objek yang digunakan dalam user interface, dan baru dilakukan penulisan kode program untuk menangani kejadian kejadian (event). Tahap pengembangan aplikasi demikian dikenal dengan istilah pengembangan aplikasi dengan pendekatan Bottom Up. Beberapa kemampuan dari Visual Basic antara lain, sebagai berikut :
1. Membuat program aplikasi berbasis Windows. 2. Membuat objek-objek pembantu program.
3. Menguji program dan menghasilkan program akhir berekstensi EXE yang langsung dapat dijalankan.
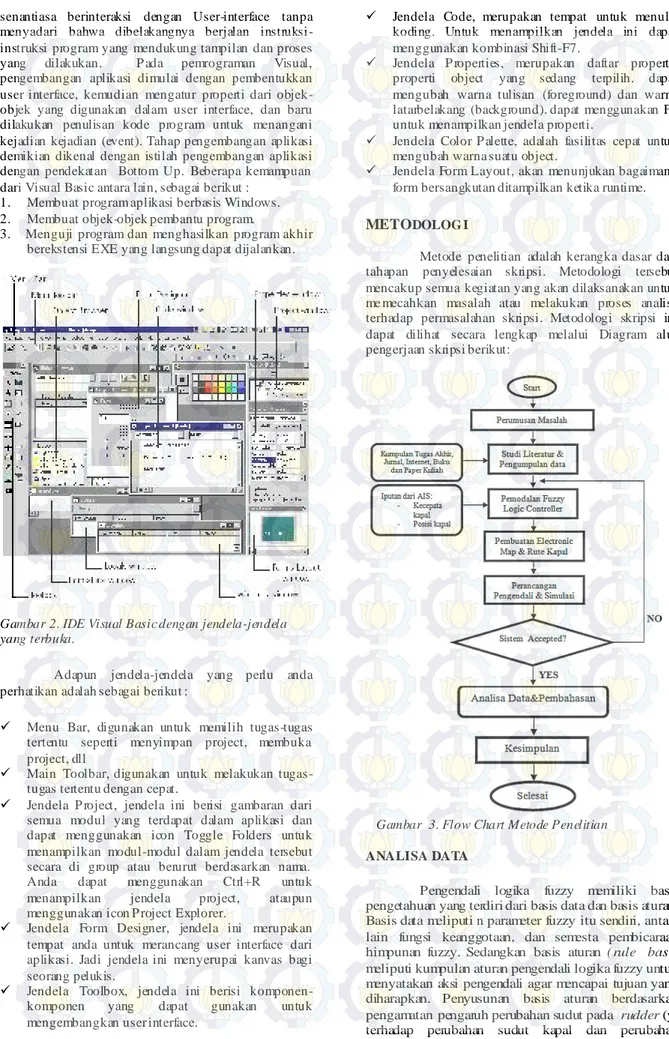
Gambar 2. IDE Visual Basic dengan jendela-jendela yang terbuka.
Adapun jendela-jendela yang perlu anda perhatikan adalah sebagai berikut :
Menu Bar, digunakan untuk memilih tugas-tugas tertentu seperti menyimpan project, membuka project, dll
Main Toolbar, digunakan untuk melakukan tugas-tugas tertentu dengan cepat.
Jendela P roject, jendela ini berisi gambaran dari semua modul yang terdapat dalam aplikasi dan dapat menggunakan icon Toggle Folders untuk menampilkan modul-modul dalam jendela tersebut secara di group atau berurut berdasarkan nama. Anda dapat menggunakan Ctrl+R untuk menampilkan jendela project, ataupun menggunakan icon P roject Explorer.
Jendela Form Designer, jendela ini merupakan tempat anda untuk merancang user interface dari aplikasi. Jadi jendela ini menyerupai kanvas bagi seorang pelukis.
Jendela Toolbox, jendela ini berisi komponen-komponen yang dapat gunakan untuk mengembangkan user interface.
Jendela Code, merupakan tempat untuk menulis koding. Untuk menampilkan jendela ini dapat menggunakan kombinasi Shift-F7.
Jendela P roperties, merupakan daftar properti-properti object yang sedang terpilih. dapat mengubah warna tulisan (foreground) dan warna latarbelakang (background). dapat menggunakan F4 untuk menampilkan jendela properti.
Jendela Color P alette, adalah fasilitas cepat untuk mengubah warna suatu object.
Jendela Form Layout, akan menunjukan bagaimana form bersangkutan ditampilkan ketika runtime.
METO
DOLOG IMetode penelitian adalah kerangka dasar dari tahapan penyelesaian skripsi. Metodologi tersebut mencakup semua kegiatan yang akan dilaksanakan untuk me mecahkan masalah atau melakukan proses analisa terhadap permasalahan skripsi. Metodologi skripsi ini dapat dilihat secara lengkap melalui Diagram alur pengerjaan skripsi berikut:
ANALISA DATA
Pengendali logika fuzzy memiliki basis pengetahuan yang terdiri dari basis data dan basis aturan. Basis data meliputi n parameter fuzzy itu sendiri, antara lain fungsi keanggotaan, dan semesta pembicaraan himpunan fuzzy. Sedangkan basis aturan (rule base)
meliputi kumpulan aturan pengendali logika fuzzy untuk menyatakan aksi pengendali agar mencapai tujuan yang diharapkan. Penyusunan basis aturan berdasarkan pengamatan pengaruh perubahan sudut pada rudder (y) terhadap perubahan sudut kapal dan perubahan kecepatan sudut pada kapal yang secara otomatis juga
dapat diamati dari keluaran KLF pada sistem manuvering kapal melalui simulasi pada matlab 2008 Saat simulasi, akan didapatkan basis aturan yang sesuai dengan karakteristik kapal.
Data-data yang telah didapatkan dari AIS (Automatic Identification System) merupakan sensor utama yang akan digunakan dalam simulasi ini. Data-data tersebut berupa posisi kapal serta kecepatan kapal. Data-data tersebut akan diolah sedemikian rupa oleh software dengan menggunakan Matlab 2008 sehingga hasil outputan dari pengolahan data tersebut dapat menjadi inputan bagi controller logika fuzzy untuk menjadi keputusan agar dapat mencegah terjadinya , yaitu apakah memperlambat atau mempercepat dan atau merubah sudut daun kemudinya. Hasil pengolahan data-data output AIS tersebut dapat mendeteksi pergerakan kapal setiap range interval waktu tertentu sehingga pergerakan kapal lain dapat di sekitar kapal pengamat dapat terdeteksi dengan baik. Setiap kapal memiliki suatu rentang jarak aman dengan radius 6Lpp, sehingga jika jarak aman antara dua kapal bersinggungan maka akan dilakukan tindakan oleh controller logika fuzzy. P ada radius tersebut akan didapatkan ralat heading kapal dengan kapal lain dengan mengubah sudut kemudi dan ralat kecepatan kapal apakah memperlambat atau menambah kecepatan kapal. Selain itu setiap pergerakan kapal lain dibuat suatu garis lurus yang menghubungkan kapal lain dengan kapal yang disimulasikan dimana garis tersebut merupakan garis prediksi . Garis tersebut merupakan garis pengolahan yang dilakukan oleh computer dengan menggunakan inputan berdasarkan data yang didapatkan dari AIS.
Variable input
P roses fuzzifikasi menghasilkan fungsi keanggotaan yang berkaitan dengan basis aturan (rule base). Basis aturan (rule base) meliputi kumpulan aturan pengendali logika fuzzy untuk menyatakan aksi pengendali agar mencapai tujuan yang diharapkan. P enyusunan basis aturan berdasarkan pengamatan pengaruh perubahan gerakan rudder terhadap tingkat perubahan sudut kapal. Basis aturan dibuat berdasarkan pengamatan yang berulang-ulang dan digunakan 98 basis aturan dimana basis aturan tersebut menghasilkan respon terbaik pada sistem kendali manuvering dan tracking kapal.
Input yang digunakan untuk controller dirancang oleh beberapa inputan perancang yaitu jarak kapal, panjang kapal Lpp dan sudut heading antara dua kapal yang diamati. Setiap variable mempunyai fungsi keanggotaan yang dibagi dalam beberapa batasan atau variable linguistic yang menjadi acuan untuk penentuan rules base oleh fuzzy logic controller. Berikut ini merupakan fungsi keanggotaan dari inputan-inputan controller logika fuzzy:
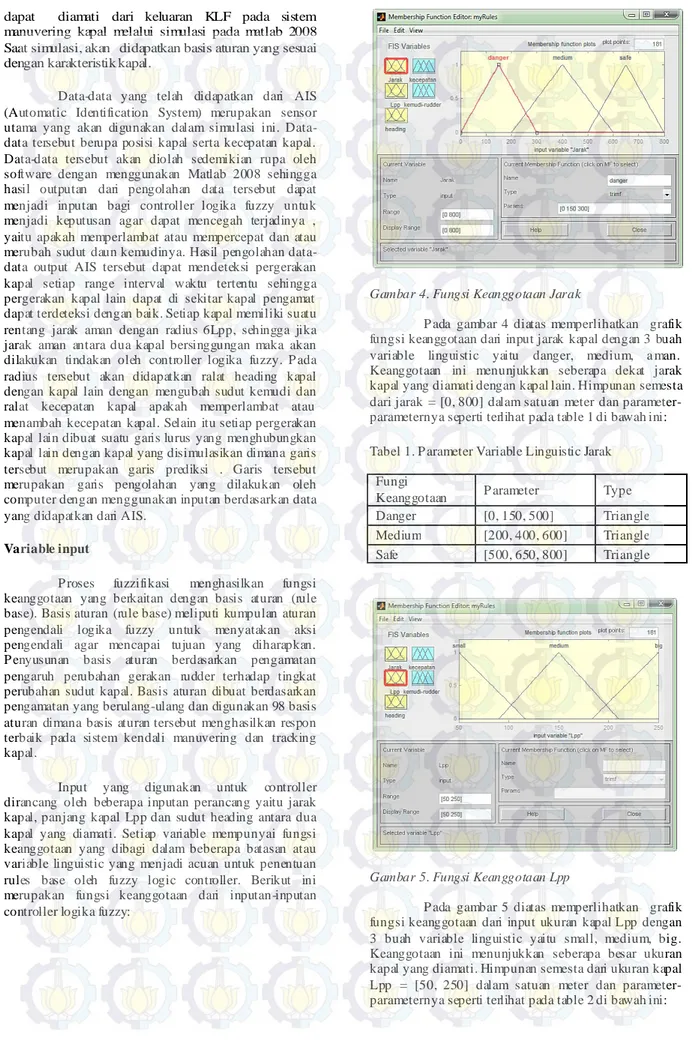
Gambar 4. Fungsi Keanggotaan Jarak
P ada gambar 4 diatas memperlihatkan grafik fungsi keanggotaan dari input jarak kapal dengan 3 buah variable linguistic yaitu danger, medium, a man. Keanggotaan ini menunjukkan seberapa dekat jarak kapal yang diamati dengan kapal lain. Himpunan semesta dari jarak = [0, 800] dalam satuan meter dan parameter-parameternya seperti terlihat pada table 1 di bawah ini:
Tabel 1. P arameter Variable Linguistic Jarak
Fungi
Keanggotaan P arameter Type Danger [0, 150, 500] Triangle Medium [200, 400, 600] Triangle Safe [500, 650, 800] Triangle
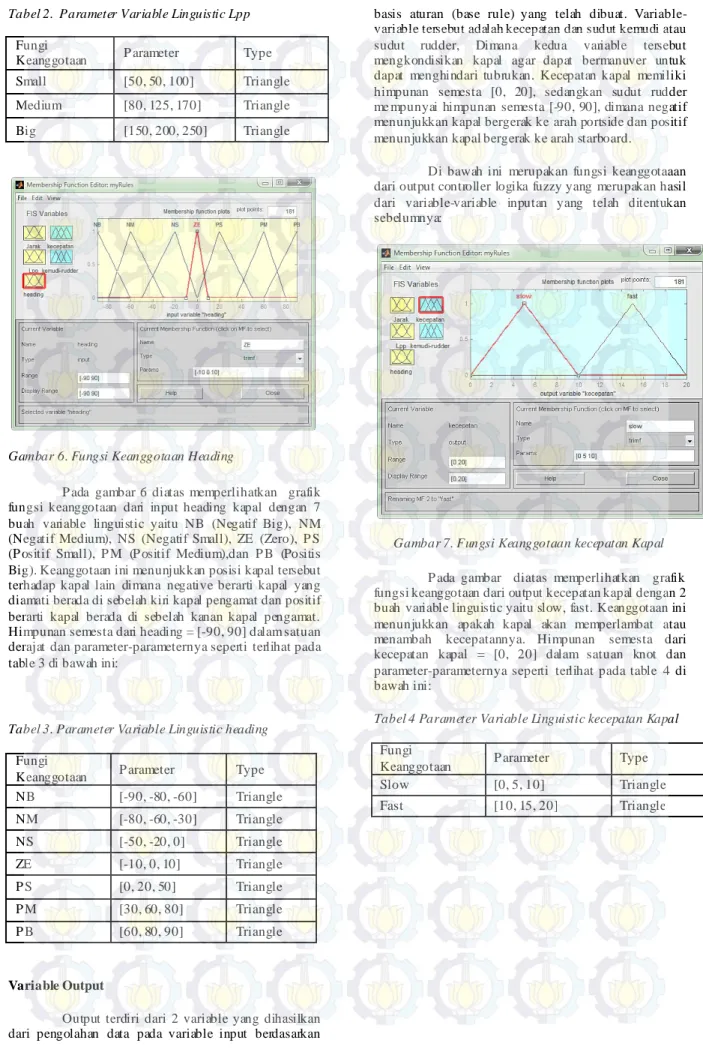
Gambar 5. Fungsi Keanggotaan Lpp
P ada gambar 5 diatas memperlihatkan grafik fungsi keanggotaan dari input ukuran kapal Lpp dengan 3 buah variable linguistic yaitu small, medium, big. Keanggotaan ini menunjukkan seberapa besar ukuran kapal yang diamati. Himpunan semesta dari ukuran kapal Lpp = [50, 250] dalam satuan meter dan parameter-parameternya seperti terlihat pada table 2 di bawah ini:
Tabel 2. Parameter Variable Linguistic Lpp
Fungi
Keanggotaan P arameter Type Small [50, 50, 100] Triangle Medium [80, 125, 170] Triangle Big [150, 200, 250] Triangle
P ada gambar 6 diatas memperlihatkan grafik fungsi keanggotaan dari input heading kapal dengan 7 buah variable linguistic yaitu NB (Negatif Big), NM (Negatif Medium), NS (Negatif Small), ZE (Zero), P S (P ositif Small), P M (P ositif Medium),dan P B (Positis Big). Keanggotaan ini menunjukkan posisi kapal tersebut terhadap kapal lain dimana negative berarti kapal yang diamati berada di sebelah kiri kapal pengamat dan positif berarti kapal berada di sebelah kanan kapal pengamat. Himpunan semesta dari heading = [-90, 90] dalam satuan derajat dan parameter-parameternya seperti terlihat pada table 3 di bawah ini:
Tabel 3. Parameter Variable Linguistic heading
Fungi
Keanggotaan P arameter Type NB [-90, -80, -60] Triangle NM [-80, -60, -30] Triangle NS [-50, -20, 0] Triangle ZE [-10, 0, 10] Triangle P S [0, 20, 50] Triangle P M [30, 60, 80] Triangle P B [60, 80, 90] Triangle Variable Output
Output terdiri dari 2 variable yang dihasilkan dari pengolahan data pada variable input berdasarkan
basis aturan (base rule) yang telah dibuat. Variable-variable tersebut adalah kecepatan dan sudut kemudi atau sudut rudder, Dimana kedua variable tersebut mengkondisikan kapal agar dapat bermanuver untuk dapat menghindari tubrukan. Kecepatan kapal memiliki himpunan semesta [0, 20], sedangkan sudut rudder me mpunyai himpunan semesta [-90, 90], dimana negatif menunjukkan kapal bergerak ke arah portside dan positif menunjukkan kapal bergerak ke arah starboard.
Di bawah ini merupakan fungsi keanggotaaan dari output controller logika fuzzy yang merupakan hasil dari variable-variable inputan yang telah ditentukan sebelumnya:
Gambar 7. Fungsi Keanggotaan kecepatan Kapal
P ada gambar diatas memperlihatkan grafik fungsi keanggotaan dari output kecepatan kapal dengan 2 buah variable linguistic yaitu slow, fast. Keanggotaan ini menunjukkan apakah kapal akan memperlambat atau menambah kecepatannya. Himpunan semesta dari kecepatan kapal = [0, 20] dalam satuan knot dan parameter-parameternya seperti terlihat pada table 4 di bawah ini:
Tabel 4 Parameter Variable Linguistic kecepatan Kapal
Fungi
Keanggotaan P arameter Type Slow [0, 5, 10] Triangle Fast [10, 15, 20] Triangle
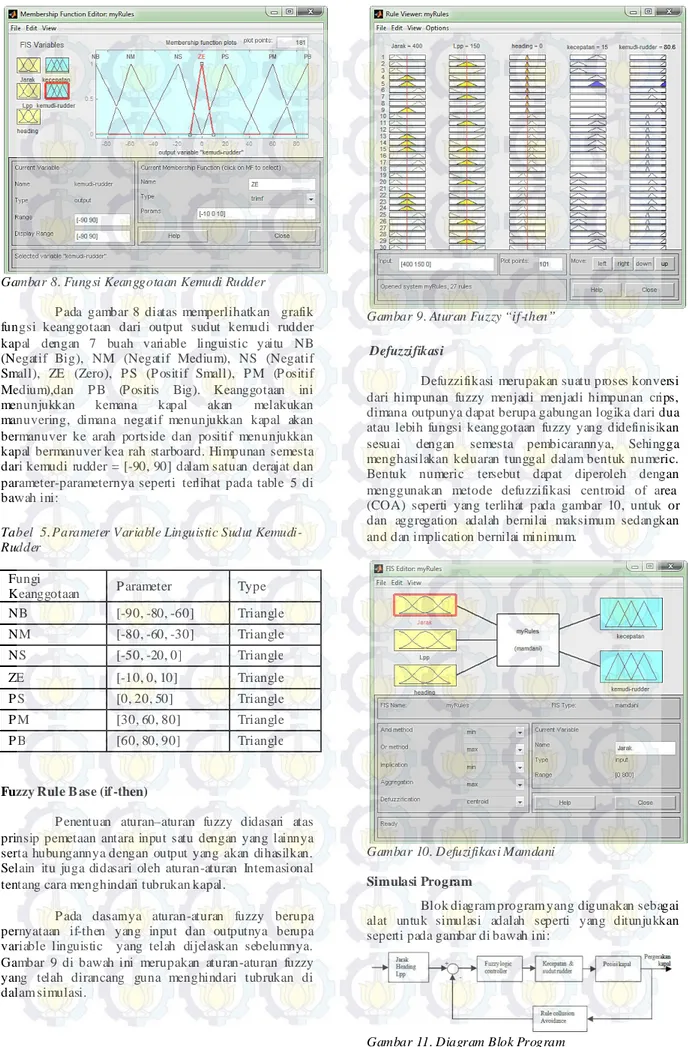
Gambar 8. Fungsi Keanggotaan Kemudi Rudder
P ada gambar 8 diatas memperlihatkan grafik fungsi keanggotaan dari output sudut kemudi rudder kapal dengan 7 buah variable linguistic yaitu NB (Negatif Big), NM (Negatif Medium), NS (Negatif Small), ZE (Zero), P S (P ositif Small), P M (P ositif Medium),dan P B (P ositis Big). Keanggotaan ini menunjukkan kemana kapal akan melakukan manuvering, dimana negatif menunjukkan kapal akan bermanuver ke arah portside dan positif menunjukkan kapal bermanuver kea rah starboard. Himpunan semesta dari kemudi rudder = [-90, 90] dalam satuan derajat dan parameter-parameternya seperti terlihat pada table 5 di bawah ini:
Tabel 5. Parameter Variable Linguistic Sudut Kemudi-Rudder
Fungi
Keanggotaan P arameter Type NB [-90, -80, -60] Triangle NM [-80, -60, -30] Triangle NS [-50, -20, 0] Triangle ZE [-10, 0, 10] Triangle P S [0, 20, 50] Triangle P M [30, 60, 80] Triangle P B [60, 80, 90] Triangle
Fuzzy Rule B ase (if -then)
P enentuan aturan–aturan fuzzy didasari atas prinsip pemetaan antara input satu dengan yang lainnya serta hubungannya dengan output yang akan dihasilkan. Selain itu juga didasari oleh aturan-aturan Internasional tentang cara menghindari tubrukan kapal.
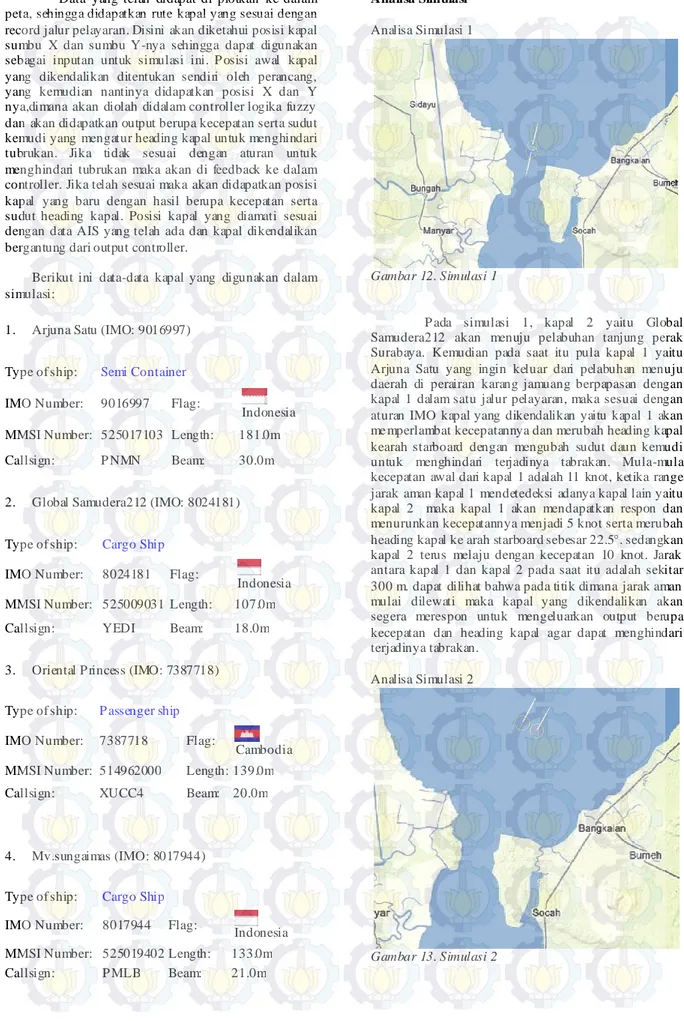
P ada dasarnya aturan-aturan fuzzy berupa pernyataan if-then yang input dan outputnya berupa variable linguistic yang telah dijelaskan sebelumnya. Gambar 9 di bawah ini merupakan aturan-aturan fuzzy yang telah dirancang guna menghindari tubrukan di dalam simulasi.
Gambar 9. Aturan Fuzzy “if-then”
Defuzzifikasi
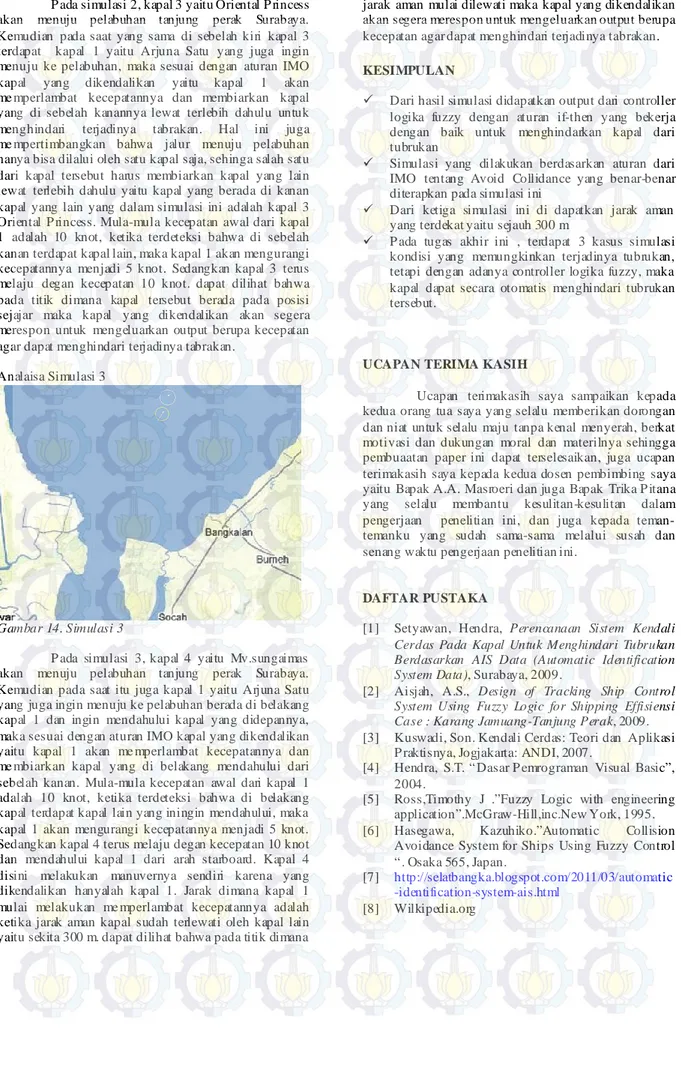
Defuzzifikasi merupakan suatu proses konversi dari himpunan fuzzy menjadi menjadi himpunan crips, dimana outpunya dapat berupa gabungan logika dari dua atau lebih fungsi keanggotaan fuzzy yang didefinisikan sesuai dengan semesta pembicarannya, Sehingga menghasilakan keluaran tunggal dalam bentuk numeric. Bentuk numeric tersebut dapat diperoleh dengan menggunakan metode defuzzifikasi centroid of area (COA) seperti yang terlihat pada gambar 10, untuk or dan aggregation adalah bernilai maksimum sedangkan and dan implication bernilai minimum.
Gambar 10. Defuzifikasi Mamdani Simulasi Program
Blok diagram program yang digunakan sebagai alat untuk simulasi adalah seperti yang ditunjukkan seperti pada gambar di bawah ini:
Data yang telah didapat di plotkan ke dalam peta, sehingga didapatkan rute kapal yang sesuai dengan record jalur pelayaran. Disini akan diketahui posisi kapal sumbu X dan sumbu Y-nya sehingga dapat digunakan sebagai inputan untuk simulasi ini. P osisi awal kapal yang dikendalikan ditentukan sendiri oleh perancang, yang kemudian nantinya didapatkan posisi X dan Y nya,dimana akan diolah didalam controller logika fuzzy dan akan didapatkan output berupa kecepatan serta sudut kemudi yang mengatur heading kapal untuk menghindari tubrukan. Jika tidak sesuai dengan aturan untuk menghindari tubrukan maka akan di feedback ke dalam controller. Jika telah sesuai maka akan didapatkan posisi kapal yang baru dengan hasil berupa kecepatan serta sudut heading kapal. Posisi kapal yang diamati sesuai dengan data AIS yang telah ada dan kapal dikendalikan bergantung dari output controller.
Berikut ini data-data kapal yang digunakan dalam simulasi:
1. Arjuna Satu (IMO: 9016997)
Type of ship: Semi Container
IMO Number: 9016997 Flag:
Indonesia MMSI Number: 525017103 Length: 181.0m Callsign: P NMN Beam: 30.0m
2. Global Samudera212 (IMO: 8024181)
Type of ship: Cargo Ship
IMO Number: 8024181 Flag:
Indonesia MMSI Number: 525009031 Length: 107.0m Callsign: YEDI Beam: 18.0m
3. Oriental P rincess (IMO: 7387718)
Type of ship: P assenger ship
IMO Number: 7387718 Flag:
Cambodia MMSI Number: 514962000 Length: 139.0m Callsign: XUCC4 Beam: 20.0m
4. Mv.sungaimas (IMO: 8017944)
Type of ship: Cargo Ship
IMO Number: 8017944 Flag:
Indonesia MMSI Number: 525019402 Length: 133.0m Callsign: P MLB Beam: 21.0m
Analisa Simulasi
Analisa Simulasi 1
Gambar 12. Simulasi 1
P ada simulasi 1, kapal 2 yaitu Global Samudera212 akan menuju pelabuhan tanjung perak Surabaya. Kemudian pada saat itu pula kapal 1 yaitu Arjuna Satu yang ingin keluar dari pelabuhan menuju daerah di perairan karang jamuang berpapasan dengan kapal 1 dalam satu jalur pelayaran, maka sesuai dengan aturan IMO kapal yang dikendalikan yaitu kapal 1 akan me mperlambat kecepatannya dan merubah heading kapal kearah starboard dengan mengubah sudut daun kemudi untuk menghindari terjadinya tabrakan. Mula-mula kecepatan awal dari kapal 1 adalah 11 knot, ketika range jarak aman kapal 1 mendetedeksi adanya kapal lain yaitu kapal 2 maka kapal 1 akan mendapatkan respon dan menurunkan kecepatannya menjadi 5 knot serta merubah heading kapal ke arah starboard sebesar 22.5°. sedangkan kapal 2 terus melaju dengan kecepatan 10 knot. Jarak antara kapal 1 dan kapal 2 pada saat itu adalah sekitar 300 m. dapat dilihat bahwa pada titik dimana jarak aman mulai dilewati maka kapal yang dikendalikan akan segera merespon untuk mengeluarkan output berupa kecepatan dan heading kapal agar dapat menghindari terjadinya tabrakan.
Analisa Simulasi 2
P ada simulasi 2, kapal 3 yaitu Oriental P rincess akan menuju pelabuhan tanjung perak Surabaya. Kemudian pada saat yang sama di sebelah kiri kapal 3 terdapat kapal 1 yaitu Arjuna Satu yang juga ingin menuju ke pelabuhan, maka sesuai dengan aturan IMO kapal yang dikendalikan yaitu kapal 1 akan me mperlambat kecepatannya dan membiarkan kapal yang di sebelah kanannya lewat terlebih dahulu untuk menghindari terjadinya tabrakan. Hal ini juga me mpertimbangkan bahwa jalur menuju pelabuhan hanya bisa dilalui oleh satu kapal saja, sehinga salah satu dari kapal tersebut harus membiarkan kapal yang lain lewat terlebih dahulu yaitu kapal yang berada di kanan kapal yang lain yang dalam simulasi ini adalah kapal 3 Oriental P rincess. Mula-mula kecepatan awal dari kapal 1 adalah 10 knot, ketika terdeteksi bahwa di sebelah kanan terdapat kapal lain, maka kapal 1 akan mengurangi kecepatannya menjadi 5 knot. Sedangkan kapal 3 terus melaju degan kecepatan 10 knot. dapat dilihat bahwa pada titik dimana kapal tersebut berada pada posisi sejajar maka kapal yang dikendalikan akan segera merespon untuk mengeluarkan output berupa kecepatan agar dapat menghindari terjadinya tabrakan.
Analaisa Simulasi 3
Gambar 14. Simulasi 3
P ada simulasi 3, kapal 4 yaitu Mv.sungaimas akan menuju pelabuhan tanjung perak Surabaya. Kemudian pada saat itu juga kapal 1 yaitu Arjuna Satu yang juga ingin menuju ke pelabuhan berada di belakang kapal 1 dan ingin mendahului kapal yang didepannya, maka sesuai dengan aturan IMO kapal yang dikendalikan yaitu kapal 1 akan me mperlambat kecepatannya dan me mbiarkan kapal yang di belakang mendahului dari sebelah kanan. Mula-mula kecepatan awal dari kapal 1 adalah 10 knot, ketika terdeteksi bahwa di belakang kapal terdapat kapal lain yang iningin mendahului, maka kapal 1 akan mengurangi kecepatannya menjadi 5 knot. Sedangkan kapal 4 terus melaju degan kecepatan 10 knot dan mendahului kapal 1 dari arah starboard. Kapal 4 disini melakukan manuvernya sendiri karena yang dikendalikan hanyalah kapal 1. Jarak dimana kapal 1 mulai melakukan me mperlambat kecepatannya adalah ketika jarak aman kapal sudah terlewati oleh kapal lain yaitu sekita 300 m. dapat dilihat bahwa pada titik dimana
jarak aman mulai dilewati maka kapal yang dikendalikan akan segera merespon untuk mengeluarkan output berupa kecepatan agar dapat menghindari terjadinya tabrakan.
KESIMPULAN
Dari hasil simulasi didapatkan output dari controller logika fuzzy dengan aturan if-then yang bekerja dengan baik untuk menghindarkan kapal dari tubrukan
Simulasi yang dilakukan berdasarkan aturan dari IMO tentang Avoid Collidance yang benar-benar diterapkan pada simulasi ini
Dari ketiga simulasi ini di dapatkan jarak aman yang terdekat yaitu sejauh 300 m
P ada tugas akhir ini , terdapat 3 kasus simulasi kondisi yang memungkinkan terjadinya tubrukan, tetapi dengan adanya controller logika fuzzy, maka kapal dapat secara otomatis menghindari tubrukan tersebut.
UCAPAN TERIMA KASIH
Ucapan terimakasih saya sampaikan kepada kedua orang tua saya yang selalu memberikan dorongan dan niat untuk selalu maju tanpa kenal menyerah, berkat motivasi dan dukungan moral dan materilnya sehingga pembuaatan paper ini dapat terselesaikan, juga ucapan terimakasih saya kepada kedua dosen pembimbing saya yaitu Bapak A.A. Masroeri dan juga Bapak Trika P itana yang selalu membantu kesulitan-kesulitan dalam pengerjaan penelitian ini, dan juga kepada teman-temanku yang sudah sama-sama melalui susah dan senang waktu pengerjaan penelitian ini.
DAFTAR PUSTAKA
[1] Setyawan, Hendra, Perencanaan Sistem Kendali Cerdas Pada Kapal Untuk Menghindari Tubrukan Berdasarkan AIS Data (Automatic Identification System Data), Surabaya, 2009.
[2] Aisjah, A.S., Design of Tracking Ship Control System Using Fuzzy Logic for Shipping Effisiensi Case : Karang Jamuang-Tanjung Perak, 2009. [3] Kuswadi, Son. Kendali Cerdas: Teori dan Aplikasi
P raktisnya, Jogjakarta: ANDI, 2007.
[4] Hendra, S.T. “ Dasar P emrograman Visual Basic”, 2004.
[5] Ross,Timothy J .”Fuzzy Logic with engineering application”.McGraw-Hill,inc.New York, 1995. [6] Hasegawa, Kazuhiko.”Automatic Collision
Avoidance System for Ships Using Fuzzy Control “ . Osaka 565, Japan.
[7] http://selatbangka.blogspot.com/2011/03/automatic -identification-system-ais.html