BAB III
PERANCANGAN 3.1. Perancangan Secara Umum
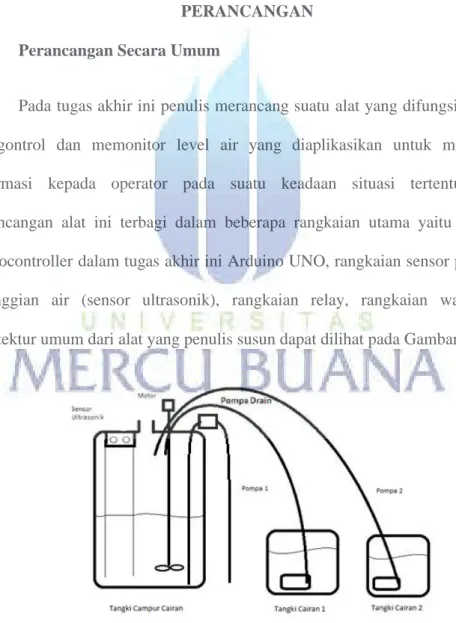
Pada tugas akhir ini penulis merancang suatu alat yang difungsikan untuk mengontrol dan memonitor level air yang diaplikasikan untuk memberikan informasi kepada operator pada suatu keadaan situasi tertentu. Dalam perancangan alat ini terbagi dalam beberapa rangkaian utama yaitu rangkaian microcontroller dalam tugas akhir ini Arduino UNO, rangkaian sensor pendeteksi ketinggian air (sensor ultrasonik), rangkaian relay, rangkaian water level. Arsitektur umum dari alat yang penulis susun dapat dilihat pada Gambar 3.1.
Gambar 3.1 Gambaran Umum Alat Disimulasikan PERANCANGAN
3.1. Perancangan Secara Umum
Pada tugas akhir ini penulis merancang suatu alat yang difungsikan untuk mengontrol dan memonitor level air yang diaplikasikan untuk memberikan informasi kepada operator pada suatu keadaan situasi tertentu. Dalam perancangan alat ini terbagi dalam beberapa rangkaian utama yaitu rangkaian microcontroller dalam tugas akhir ini Arduino UNO, rangkaian sensor pendeteksi ketinggian air (sensor ultrasonik), rangkaian relay, rangkaian water level. Arsitektur umum dari alat yang penulis susun dapat dilihat pada Gambar 3.1.
Perancangan alat juga perlu disimulasikan seperti pada kondisi yang sesungguhnya seperti yang ada pada gambar 3.1 Dalam gambar, garis line dari tangki cairan 1 dan tangki cairan 2 adalah 2 jenis cairan yang berbeda yang masuk ke tangki campur. Di atas tangki campur terdapat motor pengaduk dan sensor ultrasonik yang ditempatkan pada sisi atas untuk mendeteksi ketinggian air dalam tangki campur yang kesemuanya terhubung ke arduino sebagai control dari system.
3.2 Perancangan Mekanik
Dalam perancangan alat ini, dibutuhkan 3 buah pompa yang dipergunakan untuk memindahkan masing-masing cairan pada Tangki Cairan 1 dan Tangki Cairan 2 ke Tangki Cairan Campur dan Pompa Drain untuk mengeluarkan cairan dari dalam Tangki, seperti pada gambar 3.1
3.3 Perancangan Elektrik dan Perangkat Keras (Hardware)
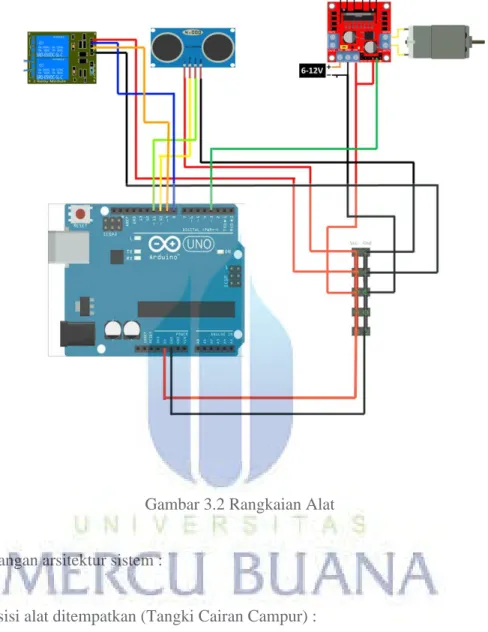
Dalam perancangan alat ini, terdapat beberapa perangkat yang terhubung ke mikrokontoler arduino. Perangkat utama tersebut adalah sensor ultra sonic, modul relay 2 chanel dan 1 rangkaiain driver motor DC, masing-masing rangkaian tersebut terhubung pada pin I/O dari Arduino UNO, rangkaian secara keseluruhan dapat dilihat seperti pada Gambar 3.2. dibawah ini :
system.
3.2 Perancangan Mekanik
Dalam perancangan alat ini, dibutuhkan 3 buah pompa yang dipergunakan untuk memindahkan masing-masing cairan pada Tangki Cairan 1 dan Tangki Cairan 2 ke Tangki Cairan Campur dan Pompa Drain untuk mengeluarkan cairan dari dalam Tangki, seperti pada gambar 3.1
3.3 Perancangan Elektrik dan Perangkat Keras (Hardware)
Dalam perancangan alat ini, terdapat beberapa perangkat yang terhubung mikrokontoler arduino. Perangkat utama tersebut adalah sensor ultra sonic, modul relay 2 chanel dan 1 rangkaiain driver motor DC, masing-masing rangkaian tersebut terhubung pada pin I/O dari Arduino UNO, rangkaian secara
Gambar 3.2 Rangkaian Alat
Keterangan arsitektur sistem :
Pada sisi alat ditempatkan (Tangki Cairan Campur) :
1. Mikrokontroller Basis Arduino UNO.
Modul ini terdiri dari berbagai komponen elektronika dan terdapat mikrokontroller yang digunakan sebagai pengendali sistem kontrol dari semua rangkaian pengontrol. Mikrokontroller yang tertanam pada modul tersebut yaitu mookrokontroller ATMega328. Pada perancangan ini penulis
Gambar 3.2 Rangkaian Alat
Keterangan arsitektur sistem :
menggunakan jenis UNO yang merupakan versi keluaran terbaru dari beberapa Arduino yang sudah ada sebelumnya.
2. Sensor Ultrasonic
Sensor Ultrasonic merupakan sensor yang bekerja pencari informasi suatu besaran ketinggian air dalam suatu wadah. Dalam alat ini sensor Ultrasonic akan memberikan informasi kepada Arduino dimana informasi yang diberikan adalah suatu kondisi level ketinggian cairan campur.
3. Motor DC.
Motor DC berfungsi sebagai pengaduk dari dua cairan yang dimasukkan dan dicampurkan di dalam tangki cairan campur.
4. Motor Driver
Motor driver (motor shield) berfungsi sebagai pengatur tegangan dan arus yang masuk ke motor DC untuk mengatur kecepatan putarnya.
5. Rangkaian Switch / Saklar On – Off
Rangkaian Switch On – Off (Relay) diperlukan dalam alat elektronika, digunakan sebagai pengaman. Kegunaan lainnya sebagai penghemat energi, jika tidak digunakan.
Perangkat keras yang digunakan dalam sistem ini adalah perangkat keras yang mendukung proses penerimaan, pengiriman, pengolahan data dan perangkat keras lain yang mendukung, adapun perangkat keras yang digunakan dalam perancangan ini diantaranya sebagai berikut:
1. Mikrokontroller berbasis Arduino tipe UNO
2. Sensor Ultrasonic sebagai sensor water level tipe HCSR04 diberikan adalah suatu kondisi level ketinggian cairan campur. 3. Motor DC.
Motor DC berfungsi sebagai pengaduk dari dua cairan yang dimasukkan dan dicampurkan di dalam tangki cairan campur.
4. Motor Driver
Motor driver (motor shield) berfungsi sebagai pengatur tegangan dan arus yang masuk ke motor DC untuk mengatur kecepatan putarnya.
5. Rangkaian Switch / Saklar On – Off
Rangkaian Switch On – Off (Relay) diperlukan dalam alat elektronika, digunakan sebagai pengaman. Kegunaan lainnya sebagai penghemat energi, jika tidak digunakan.
3. Motor Driver DC 4. Motor DC
5. Rangkaian Switch / Saklar On – Off
3.3.1 Rangkaian Mikrokontroller Arduino UNO.
Modul mikrokontroller Arduino UNO berfungsi sebagai media interface relay, pemrosesan data dan unit Input / Output. Rangkaian ini merupakan modul jadi yang mudah didapatkan di pasaran sehingga ini tidak perlu adanya perancangan tambahan, hanya saja dibutuhkan shield atau perangkat yang sesuai untuk membuat proyek tambahan
Gambar3.3 Mikrokontroller Arduino UNO
Prinsip kerja mokrokontroller Arduino UNO diatas adalah menggunakan fasilitas input/output yang merupakan fungsi untuk dapat menerima sinyal relay, pemrosesan data dan unit Input / Output. Rangkaian ini merupakan modul jadi yang mudah didapatkan di pasaran sehingga ini tidak perlu adanya perancangan tambahan, hanya saja dibutuhkan shield atau perangkat yang sesuai untuk membuat proyek tambahan
masukan (input) dan memberikan sinyal keluaran (output). Sinyal input maupun sinyal output adalah berupa data digital 1 (high, mewakili tegangan 5 volt) dan 0 (low, mewakili tegangan 0 volt). Mikrokontroller Arduino UNO memiliki beberapa pin yang terdiri dari inpit/output digital untuk mengendalikan relay. Pada modul arduino UNO tersebut terdapat pin USB yang digunakan sebagai input/output ke komputer
3.3.2. Rangkaian Sensor Ultrasonik
Rangkaian Sensor Ultrasonik adalah sensor pengukur jarak dengan menggunakan gelombang ultrasonik. Sensor HC-SR04 merupakan sensor ultrasonik yang mampu mengukur jarak dari 2cm hingga 450 cm. Keluaran dari sensor ini berupa pulsa yang lebarnya merepresentasikan jarak. Dengan kemampuan sensor ini memungkinkan membaca perubahan jarak pada ketinggian air menggunakan gelombang ultrasonik berbasis Arduino UNO dan dengan interfacing LabView2009.
Sensor ultrasonik adalah gelombang dengan besar frekuensi gelombang suara ,yaitu lebih dari 20kHz. Sensor ultrasonik terdiri dari rangkaian pemancar ultrasonik yang disebut transmitter dan rangkaian penerima ultrasonik yang disebut receiver . Sinyal ultrasonik yang dibangkitkan akan dipancarkan dari trasmitter ultrasonik. Sinyal yang diterima oleh rangkaian receiver dikirimkan ke rangkaian mikrokontroller untuk selanjutnya diolah untuk menghitung jarak terhadap benda di depannya (bidang pantul).
3.3.2. Rangkaian Sensor Ultrasonik
Rangkaian Sensor Ultrasonik adalah sensor pengukur jarak dengan menggunakan gelombang ultrasonik. Sensor HC-SR04 merupakan sensor ultrasonik yang mampu mengukur jarak dari 2cm hingga 450 cm. Keluaran dari sensor ini berupa pulsa yang lebarnya merepresentasikan jarak. Dengan kemampuan sensor ini memungkinkan membaca perubahan jarak pada ketinggian air menggunakan gelombang ultrasonik berbasis Arduino UNO dan dengan interfacing LabView2009.
Sensor ultrasonik adalah gelombang dengan besar frekuensi gelombang suara ,yaitu lebih dari 20kHz. Sensor ultrasonik terdiri dari rangkaian pemancar ultrasonik yang disebut transmitter dan rangkaian penerima ultrasonik yang
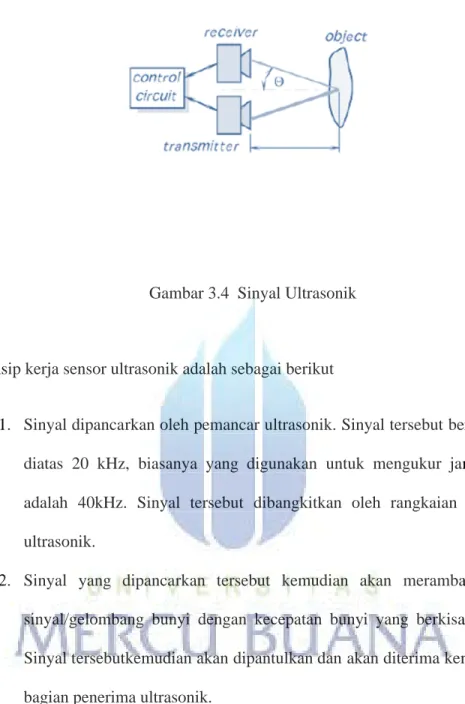
Gambar 3.4 Sinyal Ultrasonik
Prinsip kerja sensor ultrasonik adalah sebagai berikut
1. Sinyal dipancarkan oleh pemancar ultrasonik. Sinyal tersebut berfrekuensi diatas 20 kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40kHz. Sinyal tersebut dibangkitkan oleh rangkaian pemancar ultrasonik.
2. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal/gelombang bunyi dengan kecepatan bunyi yang berkisar 340m/s. Sinyal tersebutkemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima ultrasonik.
3. Setelah sinyal tersebut sampai di penerima ultrasonik, maka sinyal tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasar rumus S = 340.t/2, dimana
S : jarak anatara sensor ultrasonik dengan bidang pantul
t : selisih waktu antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonik.
Gambar 3.4 Sinyal Ultrasonik
Prinsip kerja sensor ultrasonik adalah sebagai berikut
1. Sinyal dipancarkan oleh pemancar ultrasonik. Sinyal tersebut berfrekuensi diatas 20 kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40kHz. Sinyal tersebut dibangkitkan oleh rangkaian pemancar ultrasonik.
2. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal/gelombang bunyi dengan kecepatan bunyi yang berkisar 340m/s. Sinyal tersebutkemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima ultrasonik.
3.3.2.1 Pemancar Ultrasonik (Transmitter)
Pemancar Ultrasonik ini merupakan rangkian yang memancarkan sinyal sinusoidal berfrekuensi diatas 20kHz
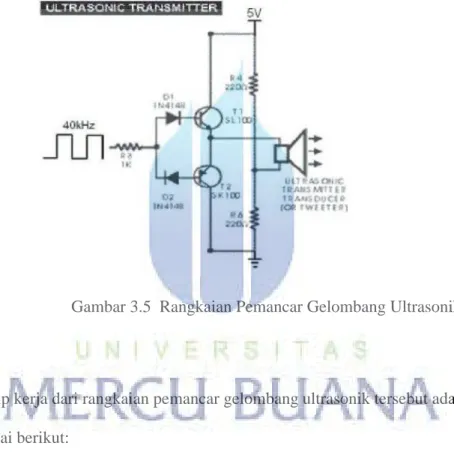
Gambar 3.5 Rangkaian Pemancar Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut:
1. Sinyal 40kHz dibangkitkan melalui mikrokontroller.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3kOhm untuk pengaman ketika sinyal tersebut membias maju rangkaian dioda dan transistor.
3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang merupakan kombinasi dari 2 buah dioda dan 2 buah trasistor.
Gambar 3.5 Rangkaian Pemancar Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut:
4. Ketika sinyal dari masukan berlogika tinggi (+5V), maka arus akan melewati dioda D1 (D1 On), kemudian arus tersebut akan membias transistor T1, sehingga arus yang akan mengalir pada kolektor T1 akan besar sesuai dari penguatan dari transistor.
5. Ketika sinyal masukan berlogika tinggi (0V), maka arus akan melewati dioda D2 (D2 On), kemudian arus tersebut akan membias transistor T2, sehingga arus yang akan mengalir pada kolektor T2 akan besar sesuai dari penguatan dari transistor.
6. Resistor R4 dan R6 berfingsi untuk membagi tegangan menjadi 2,5 V. Singga pemancar ultrasonik akan menerima tegangan bolak-balik dengan Vpeak –peak adalah 5V (+2,5V sampai dengan -2,5V)
3.3.2.2 .Penerima Ultrasonik (Receiver )
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang dipancarkan oleh pemancarultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaianband pass filter(penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan.
Kemudian sinyal keluarannyaakan dikuatkan dan dilewatkan ke rangkaian komparator (pembanding) dengan tegangan referensiyang ditentukan berdasarkan tegangan keluaran dari penguat pada saat jarak antara sensor dengan bidang pantul/air mencapai jarak minimum . Dapat dianggapkeluaran komparator pada kondisi ini adalahhigh(logika “1”) sedangkan jarak yang lebih jauhadalahlow(logika‟0‟).
sehingga arus yang akan mengalir pada kolektor T2 akan besar sesuai dari penguatan dari transistor.
6. Resistor R4 dan R6 berfingsi untuk membagi tegangan menjadi 2,5 V. Singga pemancar ultrasonik akan menerima tegangan bolak-balik dengan Vpeak –peak adalah 5V (+2,5V sampai dengan -2,5V)
3.3.2.2 .Penerima Ultrasonik (Receiver )
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang dipancarkan oleh pemancarultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaianband pass filter(penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan.
Logika-logika biner ini kemudian diteruskan ke rangkaian pengendali(mikrokontroler).
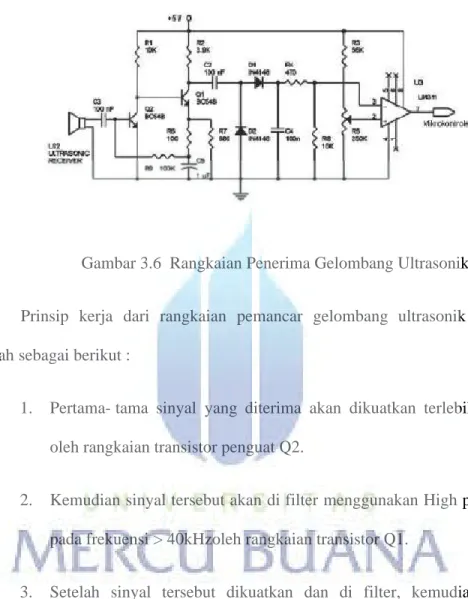
Gambar 3.6 Rangkaian Penerima Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
1. Pertama- tama sinyal yang diterima akan dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.
2. Kemudian sinyal tersebut akan di filter menggunakan High pass filter pada frekuensi > 40kHzoleh rangkaian transistor Q1.
3. Setelah sinyal tersebut dikuatkan dan di filter, kemudian sinyal tersebut akan disearahkan olehrangkaian dioda D1 dan D2.
4. Kemudian sinyal tersebut melalui rangkaian filter low pass filter pada frekuensi < 40kHz melaluirangkaian filter C4 dan R4.
5. Setelah itu sinyal akan melalui komparator Op-Amp pada U3. Gambar 3.6 Rangkaian Penerima Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
1. Pertama- tama sinyal yang diterima akan dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.
2. Kemudian sinyal tersebut akan di filter menggunakan High pass filter pada frekuensi > 40kHzoleh rangkaian transistor Q1.
6. Jadi ketika ada sinyal ultrasonik yang masuk ke rangkaian, maka pada komparator akanmengeluarkan logika rendah (0V) yang kemudian akan diproses oleh mikrokontroler untukmenghitung jaraknya.
Pada sisi Operator:
1. Komputer
Pada sisi operator yang digunakan adalah sebuah satu unit komputer yang yang sudah terinstall program LabView 2009 sebagai sarana komunikasi dan pengendalian level air jika difungsikan secara manual, dan monitoring jika digunakan secara otomatis.
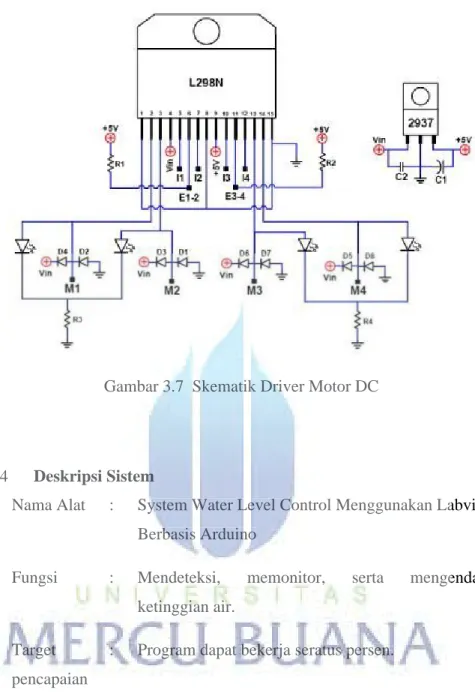
3.3.3 Rangkaian Driver Motor DC
Rangkaian driver motor dc ini berfungsi untuk mendrive motor dc, sehingga daya yang dibutuh kan untuk motor dc dapat terpenuhi, driver ini adalah salah satu alternatif untuk mengontrol motor dc dengan daya yang cukup. Didalam rangkaina ini terdapat komponen utama yaitu ic L298N yang dapat mendrive motor hingga 4 ampere. Sehingga motor dc tidak akan kekurangan daya, mengingat peneliti menggunakan mikro controller yang memiliki daya output yang kecil untuk mengontrol motor dc tersebut. Berikut merupakan skematik motor driver dengan l298n.
Pada sisi operator yang digunakan adalah sebuah satu unit komputer yang yang sudah terinstall program LabView 2009 sebagai sarana komunikasi dan pengendalian level air jika difungsikan secara manual, dan monitoring jika digunakan secara otomatis.
3.3.3 Rangkaian Driver Motor DC
Rangkaian driver motor dc ini berfungsi untuk mendrive motor dc, sehingga daya yang dibutuh kan untuk motor dc dapat terpenuhi, driver ini adalah salah satu alternatif untuk mengontrol motor dc dengan daya yang cukup. Didalam rangkaina ini terdapat komponen utama yaitu ic L298N yang dapat mendrive motor hingga 4 ampere. Sehingga motor dc tidak akan kekurangan daya, mengingat peneliti menggunakan mikro controller yang memiliki daya output yang kecil untuk mengontrol motor dc tersebut. Berikut merupakan skematik motor driver dengan l298n.
Gambar 3.7 Skematik Driver Motor DC
3.4 Deskripsi Sistem
Nama Alat : System Water Level Control Menggunakan Labview Berbasis Arduino
Fungsi : Mendeteksi, memonitor, serta mengendalikan ketinggian air.
Target pencapaian
: Program dapat bekerja seratus persen.
Spesifikasi : Jumlah variabel input dua yaitu, - Personal computer (PC) - Sensor Ultrasonik
Jumlah variable output dua yaitu, - Relay1 (Pompa 1) - Relay2 (Pompa 2)
Gambar 3.7 Skematik Driver Motor DC
3.4 Deskripsi Sistem
Nama Alat : System Water Level Control Menggunakan Labview Berbasis Arduino
Fungsi : Mendeteksi, memonitor, serta mengendalikan ketinggian air.
Target pencapaian
- Relay 3 (Pompa Drain)
Algoritma (metode yang diterapkan) yaitu,
- Mendeteksi ketinggian air
- Megirimkan data hasil pendeteksian ke pc - Membandingkan hasil pendeteksian dengan
setting program.
- Memberikan feed back data ke arduino - Menyalakan pompa
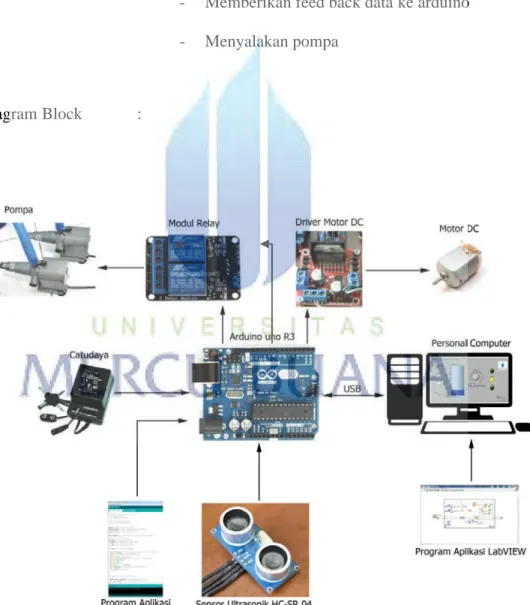
Diagram Block :
Gambar 3.8 Blok Diagram System
- Memberikan feed back data ke arduino - Menyalakan pompa
3.4.1 Monitoring Interface System
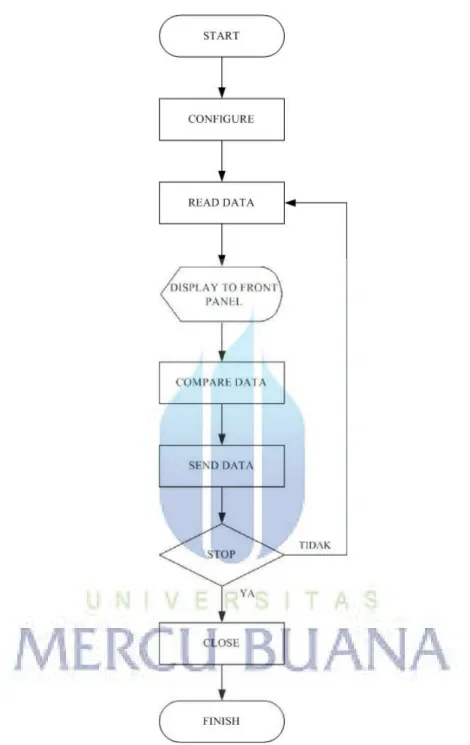
Dalam hal ini peneliti menggunakan Visa serial untuk melakukan komunikasi antara labview dengan arduino, visa read untuk membaca data yang dikirim arduino dan visa write untuk mengirim data ke arduino. Berikut diagram block untuk komunikasi serial, membaca dan mengirim data antara arduino dengan labview.
Gambar 3.9 Diagram block read and write data
Algoritma ini menggunakan beberapa user spesific fungtion. User spesific function yang digunaka antaralain yaitu :
Fungsi Visa Configur Serial Port Fungsi Visa Read
Fungsi Visa Write Fungsi Visa Close
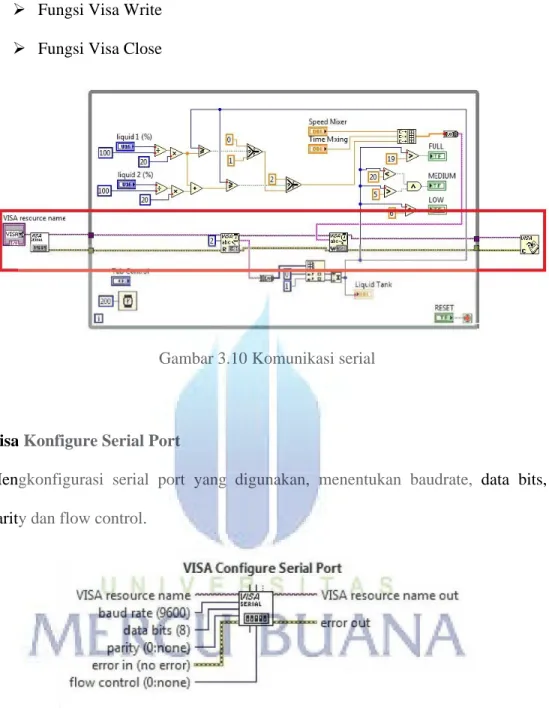
Gambar 3.10 Komunikasi serial
Visa Konfigure Serial Port
Mengkonfigurasi serial port yang digunakan, menentukan baudrate, data bits, parity dan flow control.
Gambar 3.11 Visa Configure Serial Port
Visa Read
Menerima data byte dari port serial kemudian mengubah data menjadi type data string pada terminal read buffer. Berikut merupakan gambar Visa Read.
Gambar 3.10 Komunikasi serial
Visa Konfigure Serial Port
Mengkonfigurasi serial port yang digunakan, menentukan baudrate, data bits, parity dan flow control.
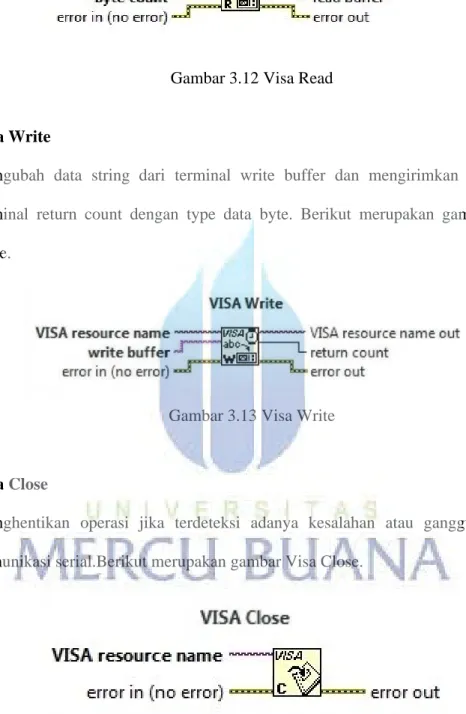
Gambar 3.12 Visa Read
Visa Write
Mengubah data string dari terminal write buffer dan mengirimkan data dari terminal return count dengan type data byte. Berikut merupakan gambar Visa write.
Gambar 3.13 Visa Write
Visa Close
Menghentikan operasi jika terdeteksi adanya kesalahan atau gangguan pada komunikasi serial.Berikut merupakan gambar Visa Close.
Gambar 3.14 Visa Close
Mengubah data string dari terminal write buffer dan mengirimkan data dari terminal return count dengan type data byte. Berikut merupakan gambar Visa write.
Gambar 3.13 Visa Write
Visa Close
Menghentikan operasi jika terdeteksi adanya kesalahan atau gangguan pada komunikasi serial.Berikut merupakan gambar Visa Close.
3.4.2 Memberikan Input ke Mikro Kontroller
Pada tahap ini penulis menggunakan beberapa fungsi agar perintah dari labview dapat di terima oleh mikro kontroller arduino. Beberapa fungsi tersebut adalah :
Divide dan Multipy Select
Build Array
Byte Array to String
Gambar 3.15 Input ke Mikro Kontroller Divide dan Multiply
Fungsi ini digunakan untuk pembagian dan perkalian aritmatika, pada program ini fungsi tersebut di kombinasikan untuk membentuk persentase input, sehingga input yang akan diproses sudah dalam bentuk persentase. Gambar 3.10 menunjukan fungsi divide dan multiply
Byte Array to String
Gambar 3.15 Input ke Mikro Kontroller Divide dan Multiply
Fungsi ini digunakan untuk pembagian dan perkalian aritmatika, pada program ini fungsi tersebut di kombinasikan untuk membentuk persentase input, sehingga input yang akan diproses sudah dalam bentuk persentase. Gambar 3.10
Select
Fungsi ini memiliki 3 buah input wire dan satu buah output, berfungsi untuk memilih data yang akan di keluarkan ke wire output dengan memberikan data boolean true atau false. Fungsi tersebut direpresentasikan pada gambar 3.11.
Build Array
Membentuk n-dimension array, dalam program ini menggabungkan 3 buah data menjadi 1 buah data array.B
Gambar 3.16 Divide dan Multiply
Fungsi ini memiliki 3 buah input wire dan satu buah output, berfungsi untuk memilih data yang akan di keluarkan ke wire output dengan memberikan data boolean true atau false. Fungsi tersebut direpresentasikan pada gambar 3.11.
Gambar 3.17 Select
dimension array, dalam program ini menggabungkan 3 buah data menjadi 1 buah data array.Berikut gambar fungsi tersebut.
Gambar 3.18 Build array
Fungsi ini memiliki 3 buah input wire dan satu buah output, berfungsi untuk memilih data yang akan di keluarkan ke wire output dengan memberikan data boolean true atau false. Fungsi tersebut direpresentasikan pada gambar 3.11.
dimension array, dalam program ini menggabungkan 3 buah data Fungsi ini memiliki 3 buah input wire dan satu buah output, berfungsi untuk memilih data yang akan di keluarkan ke wire output dengan memberikan data boolean true atau false. Fungsi tersebut direpresentasikan pada gambar 3.11.
Build Array
Membentuk n-dimension array, dalam program ini menggabungkan 3 buah data Fungsi ini memiliki 3 buah input wire dan satu buah output, berfungsi untuk memilih data yang akan di keluarkan ke wire output dengan memberikan data boolean true atau false. Fungsi tersebut direpresentasikan pada gambar 3.11.
Gambar 3.17 Select
dimension array, dalam program ini menggabungkan 3 buah data Fungsi ini memiliki 3 buah input wire dan satu buah output, berfungsi untuk memilih data yang akan di keluarkan ke wire output dengan memberikan data boolean true atau false. Fungsi tersebut direpresentasikan pada gambar 3.11.
Byte Array to String
Berfungsi untuk mengkonfersi byte numeric kedalam data sting, fungsi ini digunakan karena untuk mengirimkan data melalui serial port, labview menggunakan data sring agar dapat dikirim. Berikut adalah gambar byte array to string.
Gambar 3.19 Byte Array to String
3.4.3 Menampilkan Data Ketinggian Air
Pada tahap ini penulis menggunakan tiga fungsi agar data yang berupa string dapat di tampilkan pada front panel. Fungsi tersebut antara lain :
Sting to byte array Index array Join number
. Gambar 3.20 Menampilkan Data Ketinggian Air
Gambar 3.19 Byte Array to String
3.4.3 Menampilkan Data Ketinggian Air
Pada tahap ini penulis menggunakan tiga fungsi agar data yang berupa string dapat di tampilkan pada front panel. Fungsi tersebut antara lain :
Sting to byte array Index array Join number
Sting to Byte Array
Mengubah tipe data sting ke tipe data byte, karena data yang digunakan untuk dapat ditampilkan adalah tipe data byte. Berikut adalah gambar sting to byte array.
Gambar 3.21 Sting to Byte Array Index Array
Berfungsi untuk membentuk array berdimensi.Membentuk array 2 dimensi yang terdiri dari high byte dan low byte.Berikut adalah gambar Index array.
Gambar 3.22 Index Array Join Number
Membentuk data numerik dari komponen data byte.Menyatukan data high byte dengan low byte sehingga membentuk data byte seutuhnya, dalam bentuk numerik. Berikut adalah gambar join number.
Gambar 3.21 Sting to Byte Array Index Array
Berfungsi untuk membentuk array berdimensi.Membentuk array 2 dimensi yang terdiri dari high byte dan low byte.Berikut adalah gambar Index array.
Gambar 3.22 Index Array Join Number
Gambar 3.23 Join Number Realisasi
Berikut adalah realisasi dari perancangan pada front panel.
Gambar 3.24 Front panel pada LabVIEW
Keterangan nomor Gambar 3.24 :
1. Visa resource nameadalah keterangan port koneksi antara Arduino dan komputer yang digunakan.
2. Liquid 1 adalahmasukan angka nominal persentase, jumlah masukan Liquid 1 dan Liquid 2 maksimal 100%.
Realisasi
3. Liquid 2 adalah masukan angka nominal persentase, jumlah masukan Liquid 1 dan Liquid 2 maksimal 100%.
4. RESET adalah tombol untuk setting ulang.
5. Liquid Tank adalah tampilan ketinggian tangki campur Liquid 1 dan Liquid 2.
6. Speed Mixer adalah tombol pengatur kecepatan motor pengaduk dalam Liquid Tank.
7. Pompa Drain adalah tombol untuk membuang cairan dalam tangki 8. Full adalah petunjuk jika isi Liquid Tank penuh.
9. Medium adalah petunjuk jika isi Liquid Tank setengah. 10. Low adalah petunjuk jika isi Liquid Tank kosong
Realisasi dari perancangan pada block diagram.
Gambar 3.25 Block diagram pada LabVIEW 8. Full adalah petunjuk jika isi Liquid Tank penuh.
9. Medium adalah petunjuk jika isi Liquid Tank setengah. 10. Low adalah petunjuk jika isi Liquid Tank kosong
Keterangan Gambar 3.26 : 1. Pompa Drain.
2. Selang masukan Pompa Liquid 1 3. Selang masukan Pompa Liquid 2 4. Sensor Ultrasonik.
5. Motor Mixer.
Gambar 3.26Liquid Tank
Gambar 3.26 :
Selang masukan Pompa Liquid 1. Selang masukan Pompa Liquid 2 .
sor Ultrasonik. Keterangan Gambar 3.26 :
1. Pompa Drain.
2. Selang masukan Pompa Liquid 1 3. Selang masukan Pompa Liquid 2 4. Sensor Ultrasonik.
Gambar 3.26Liquid Tank
Gambar 3.26 :
Selang masukan Pompa Liquid 1. Selang masukan Pompa Liquid 2 .