31
f
f
jV I Sin Cos I V S = . . + . . ) . . ( .I Cosf jV I Sinf V + =Daya listrik dapat diuraikan menjadi 2 (dua) komponen daya, yaitu daya aktif (kW) dan daya reaktif (kVAR). Daya reaktif dikenal juga 2 macam, yaitu daya reaktif induktif (daya reaktif
lagging) dan daya reaktif kapasitif (daya reaktif leading), dengan tanda masing-masing
berlawanan. Daya dalam bentuk kompleks (S) didefinisikan sebagai berikut :
Gambar 1. Diagram vektor daya kompleks
jQ
P
S
=
+
(1)=
V .
.
I
e
jf= I
V .
Ð
f
(2) Persamaan (2) di atas menyatakan bahwa dayakompleks S besarnya VI dengan sudut
f
merupakan sudut fase antara I terhadap V, dengan satuan kVA. f je
I
V
S
=
.
.
=
Ve
j(q+f).
Ie
-jq=
V
.I
* (3)Untuk beban yang bersifat beban induktif, arus beban merupakan arus reaktif lagging, yaitu I (arus) terbelakang dari V (tegangan).
Gambar 2. Diagram vektor beban induktif
ANALISIS GENERATOR DAN MOTOR SINKRON
SEBAGAI PEMBANGKIT DAYA REAKTIF SISTEM
(Drs. Sugeng A. Karim, MT)ABSTRAK
Penelitian ini bertujuan untuk mengetahui pengaruh arus penguatan (excited current) terhadap generator dan motor sinkron. Metode yang digunakan dalam penelitian ini adalah dengan metode analisis diagram vektor.
Hasil penelitian menunjukkan bahwa (1). Akibat arus penguat yang berlebihan (over excited) mengakibatkan generator sinkron membangkitkan daya reaktif induktif, (2). Akibat arus penguat tertentu sehingga didapatkan faktor daya 1.0 mengakibatkan generator sinkron tidak membangkitkan daya reaktif , (3). Akibat arus penguat yang berkurang (under excited) mengakibatkan generator sinkron membangkitkan daya reaktif kapasitif, (4). Akibat arus penguat yang berkurang (under excited) mengakibatkan motor sinkron menyerap daya reaktif, dan (5). Akibat arus penguat yang berlebihan (over
excited) mengakibatkan motor sinkron menyerap daya reaktif negatif atau dapat juga dikatakan bahwa
motor sinkron tersebut membangkitkan daya reaktif.
Dari Gambar 2 dapat kita lihat sebagai berikut : *
.I
V
jQ
P
S
=
+
=
(4) Dimana :S = daya semu, kVA
P = daya aktif (V.I.Cos Ø), kW Q = daya reaktif (V.I. Sin Ø), kVAR V = tegangan, kV
I = arus ( I conjugate), Ampere
Oleh karena itu Q = V.I. Sin Ø, untuk beban induktif adalah positif (arus terbelakang dari tegangan), maka dianggap bahwa beban reaktif menyerap daya reaktif Q. Untuk beban yang bersifat reaktif kapasitif (arus terdahulu dari tegangan), Q = V.I. Sin Ø adalah negative, maka juga dapat dianggap bahwa beban reaktif kapasitif menyerap daya reaktif Q yang negative atau juga dapat dikatakan bahwa beban yang bersifat reaktif kapasitif (kapasitor atau beban kapasitif) membangkitkan daya reaktif Q yang positif, disebut juga sumber daya reaktif.
Gambar 3. Diagram vektor beban kapasitif Untuk beban yang merupakan beban induktif dan kapasitif, maka bagian yang kapasitif akan membangkitkan daya reaktif untuk bagian yang induktif. Pada sistem tenaga listrik yang juga melayani beban-beban yang bersifat induktif, dimana beban-beban induktif ini akan menyerap daya reaktif dari sistem. Dengan bertambahnya beban, yang pada umumnya beban-beban tersebut, misalnya lampu TL (Tube Lamp), motor-motor listrik dan lain-lain, bersifat beban induktif, ,maka kebutuhan daya reaktif semakin besar pula. Hal ini disebabkan karena daya reaktif diperlukan untuk menghasilkan medan magnit bagi keperluan magnetisasi dari beban-beban tersebut. Pada jaringan listrik dengan beban induktif,
penambahan sumber daya reaktif dekat beban, akan diperoleh keuntungan-keuntungan.
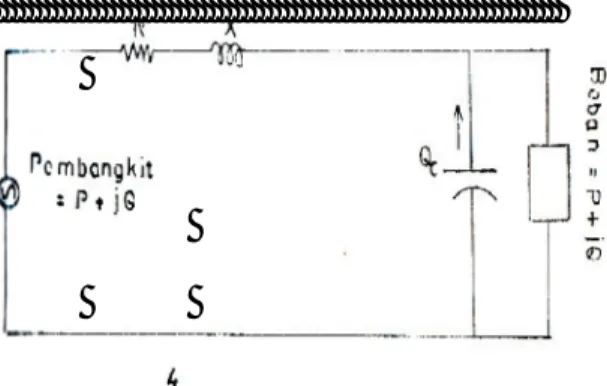
Gambar 4. Single line diagram sistem dengan daya kompleks
Pada sumber pembangkit, daya yang disediakan untuk beban sebelum pemasangan sumber daya reaktif tambahan Qc misalnya kapasitor, maka daya S = P+jQ sepenuhnya harus dibangkitkan oleh sumber pembangkit. Dengan penambahan sumber daya reaktif , daya reaktif yang sepenuhnya harus disediakn oleh pembangkit, seluruhnya atau sebagian disupply oleh sumber tambahan tersebut. Dari Gambar 4 dapat dilihat sebagai berikut :
a. Sebelum penambahan sumber daya reaktif tambahan Qc, maka :
Q beban = Q pembangkit
b. Setelah penambahan sumber daya reaktif tambahan Qc, maka :
Q beban = Q pembangkit + Qc
Dengan demikian daya reaktif yang disupplai oleh sumber pembangkit akan lebih kecil, sehingga faktor dayanya akan lebih baik. Dari keseluruhan sistem dapat dilihat bahwa penambahan sumber daya reaktif tambahan akan memperbaiki faktor daya beban.
Gambar 5. Diagram Vektor Beban Induktif Sebelum dan Setelah Penambahan Sumber Daya Reaktif Tambahan.
33
Beban pada Gambar 5 di atas denganfaktor daya Cos Ø1 akan menyerap daya reaktif kVAR1. Akibat pemasangan kapasitor CkVAR, maka daya reaktif kVAR1 menjadi lebih kecil (kVAR2) yang menyebabkan sudut Ø2lebih kecil (lebih baik). Membaiknya faktor daya ini, daya yang melalui jaringan pada KW yang tetap akan lebih kecil. Sehingga arus yang mengalir pada jaringan akan lebih kecil pula. Dengan demikian rugi daya P = I2 . R dan jatuh tegangan ∆V= I (R+jX) akan semakin kecil sehingga daya dan tegangan yang sampai kebeban akan naik (lebih baik).
Gambar 6. Single line diagram sistem pengaliran arus
Naiknya tegangan dan membesarnya daya pada beban akibat penambahan sumber daya reaktif tambahan akan menyebabkan kapasitas dari beban menjadi lebih baik, dibanding sebelum penambahan sumber daya reaktif tambahan.
HASIL DAN PEMBAHASAN
Generator dan motor sinkron dapat membangkitkan daya reaktif dengan mengatur besar arus penguatnya.
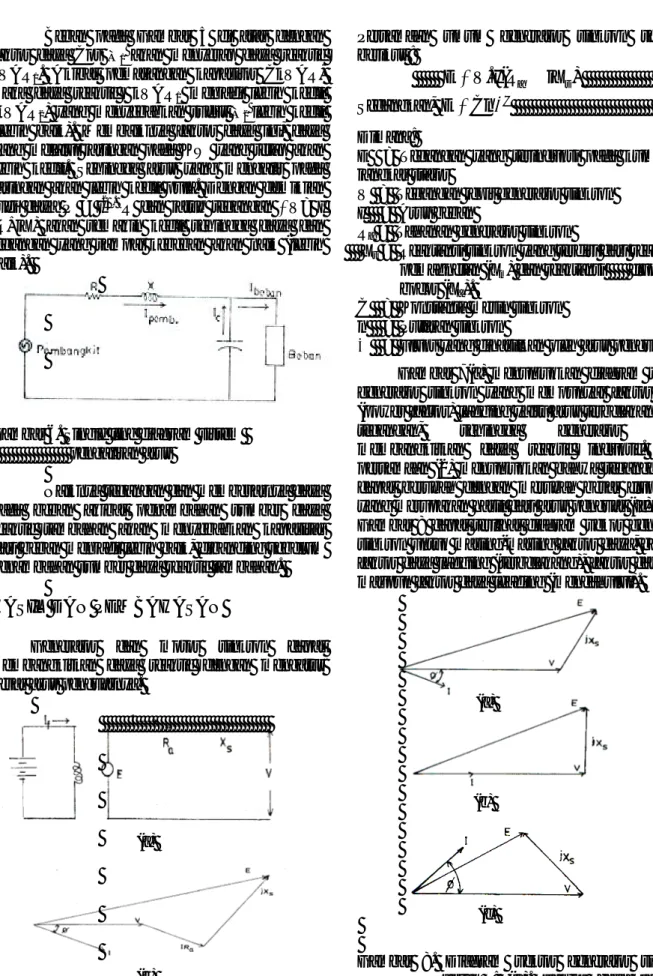
Gambar 7. Generator sinkron, (a). Rangkaian listrik, (b) diagram vektor
Persamaan umum generator sinkron sebagai berikut :
E
=
V
.
I
(
R
a+
jX
s)
(1)Sedangkan,
E
=
Cn
f
' (2) Dimana:E = Tegangan yang terinduksi pada kumparan jangkar stator
V = Tegangan jepit generator sinkron I = Arus beban
Ra = Tahanan generator sinkron
Xs = Reaktansi sinkron yang terdiri dari reaktansi pemagnetan (Xm) dan reaktansi fluks
bocor (Xa).
C = Konstanta mesin sinkron n = Putaran sinkron
Ǿ = Fluks yang dihasilkan oleh arus penguat Gambar 7(a) menunjukkan diagram vektor generator sinkron yang mempunyai faktor daya (power factor) lagging yaitu arus terbelakang dari tegangan, sehingga generator akan membangkitkan daya reaktif induktif. Dari persamaan (2) menunjukkan bahwa tegangan (E) dapat berubah dengan merubah besar fluks (Ǿ) yang merupakan hasil dari arus penguat (If). Pada Gambar 8 dapat terlihat diagram vekor generator sinkron untuk masing-masing faktor daya, baik itu faktor daya lagging (terbelakang), faktor daya 1,0 maupun faktor daya leading (mendahului).
Gambar 8. Diagram vektor generator sinkron untuk : (a). Faktor daya lagging (over excited), (b). Faktor daya 1,0 (c). Faktor daya leading (under
excited) (a) (b) (c) (a) (b)
Gambar 8(a) menunjukkan bahwa faktor daya lagging, ini diakibatkan oleh arus penguat yang berlebihan (over excited) sehingga menyebabkan arus akan terbelakang dari tegangan yang mengakibatkan generator sinkron membangkitkan daya reaktif induktif. Gambar 8(b) menunjukkan faktor daya 1.0, ini diakibatkan oleh besarnya arus penguat tertentu sehingga didapatkan faktor daya 1.0 yang menyebabkan generator tidak dapat membangkitkan daya reaktif, dan Gambar 8(c) menunjukkan faktor daya leading, ini diakibatkan oleh arus penguat yang berkurang (under excited) sehingga menyebabkan arus akan mendahului dari tegangan yang mengakibatkan generator sinkron membangkitkan daya reaktif kapasitif.
Motor sinkron dapat juga membangkitkan daya reaktif dengan mengatur arus penguatnya.
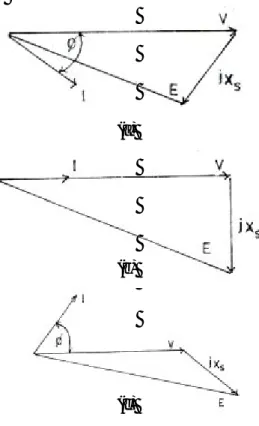
Gambar 9. (a) Rangkaian motor sinkron, (b) Diagram vektornya
Persamaan umum motor sinkron :
E
=
V
-
I
(
R
a+
jX
s)
Dimana :E
=
cn
f
'Seperti pada generator sinkron, dengan mengatur arus penguat yaitu menaikkan atau menurunkan, akan didapatkan faktor daya yang berlainan. Di bawah ini dapat dilihat diagram vektor untuk masing-masing faktor daya lagging (arus terbelakang dari tegangan), faktor daya 1,0 dan faktor daya leading (arus terdahulu dari tegangan)
R
adiabaikan. Gambar 9(a) menunjuk- kan bahwa faktor daya lagging (arus terbelakang dari tegangan) atau dengan kata lain akibat arus penguat yang berkurang (under excited) menyebabkan arus terbelakang dari tegangan(faktor daya lagging) yang mengakibatkan motor sinkron menyerap daya reaktif. Sedangkan Gambar 9b menunjukkan bahwa faktor daya 1,0 yang menyebabkan motor sinkron tidak menyerap dan tidak membangkitkan daya reaktif, serta Gambar 9(c) menunjukkan bahwa faktor daya leading (arus terdahulu dari tegangan) atau dengan kata lain akibat arus penguat yang berlebih (over excited), sehingga mengakibatkan motor sinkron menyerap daya reaktif negatif atau dapat juga dikatakan bahwa motor sinkron tersebut membangkitkan daya reaktif.
Gambar 10. Diagram vektor motor sinkron untuk : (a)Faktor daya lagging
(under excited), (b) dan (c)Faktor daya leading (over excited)
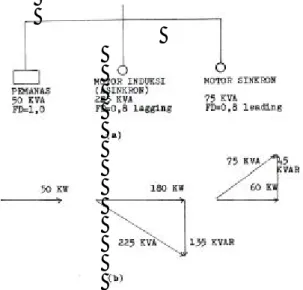
Sebagai contoh dapat dilihat di bawah ini, bahwa motor sinkron yang mempunyai penguatan lebih (over excited) dapat memperbaiki faktor daya. Misalnya suatu kelompok beban yang terdiri dari alat pemanas, motor induksi (asinkron) dan motor sinkron seperti diperlihatkan pada Gambar 11a di bawah ini. Motor sinkron yang diharapkan dapat memperbaiki faktor daya diberi penguatan lebih (over excited) sehingga akan membangkitkan daya reaktif. Gambar 11.a terlihat beban-beban terdiri dari :
a. Pemanas dengan daya = 50 KVA Faktor daya = 1.0 (a) (b) (c) (a) (b)
35
b. Motor induksi (asinkron) dengan daya= 225 kVA
Faktor daya = 0.8 lagging
c. Motor sinkron dengan daya = 75 KVA Faktor daya = 0.8 leading
Disini terlihat pada Gambar 11b bahwa :
a. Daya aktif pemanas = 50 x 1.0 = 50 x Cos 0o = 50 KW
Daya reaktif pemanas = 50 x Sin 0o = 0 b. Daya aktif motor induksi (asinkron) = 225 x 0.8 = 225 x Cos 36.87o
= 180 KW
Daya reaktif motor induksi (asinkron) = 225 x Sin 36.87o
= 135 KVAR lagging c. Daya aktif motor sinkron = 75 x 0.8 = 75 x Cos 36.87o
= 60 KW Daya reaktif motor sinkron = 75 x Sin 37.87o = 45 KVAR leading
Gambar 11. Pengaruh motor sinkron penguatan lebih (over excited) untuk perbaikan faktor daya.
Sehingga terlihat pada Gambar 5c didapatkan penjumlahan vektor yang menghasilkan sebagai berikut :
- Daya aktif = 290 kW
- Daya reaktif = 90 kVAR (lagging) - Daya semu = 303 kVA
- Faktor daya = 0.957 (lagging)
Perlu juga diketahui dari hasil di atas bahwa generator dan motor sinkron sebagai pembangkit daya reaktif, yang kemampuannya dibatasi oleh thermal ratings dari stator dan rotor serta output dari penguatnya (excited-nya).
SIMPULAN
1. Motor sinkron dapat memperbaiki faktor daya diberi penguatan lebih (over excited) sehingga akan membangkitkan daya reaktif.
2. Akibat arus penguat yang berlebihan (over
excited) mengakibatkan generator sinkron
membangkitkan daya reaktif induktif, dan sebaliknya jika diberi arus penguat berkurang (under excited) generator sinkron membangkitkan daya reaktif kapasitif.
DAFTAR PUSTAKA
A. Arismunandar. 1972. Teknik Tenaga Listrik. PT. Pranadnya Paramita Jakarta.
Djoko Achyanto. 1986. Mesin – mesin Listrik. Edisi keeempat
Hanapi Gunawan. 1988. Mesin dan Rangkaian
Listrik. Edisi ke enam.
J.D. Edwards. 1986. Electrical Machines. Second Edition
Stevenson Willam D. 1994. Element of Power