23 Kendalian (Plant) Masukan Keluaran
Bab II
Landasan Teori
II.1 Dasar-dasar sistem kendali
Sejarah perkembangan sistem kendali diawali dengan revolusi industri I dan II sedangkan Perang Dunia I dan II mempercepat perkembangannya. James Watts menemukan generator sentrifugal (1767); Minovzky menemukan pengendalian kapal laut (1922); metoda analisis kepekaan ditemukan oleh Nyquist (1932); Hazen pada tahun 1934 menemukan sistem kendali posisi; metoda analisis fungsi frekuensi masukan-tunggal keluaran-tunggal (single masukan single keluaran = SISO) dikembangkan oleh Bode pada tahun 1940; sedangkan W.R. Evans pada tahun 1950 mengembangkan metoda analisis tempat kedudukan akar (root locus).
Sistem kendali modern diawali pada tahun 1960, yaitu untuk masukan-jamak keluaran-masukan-jamak (multi masukan multi keluaran = MIMO) yang berdasarkan pada teorema vektor matriks. Disusul dengan berkembangnya sistem kendali optimal (yang memenuhi kriteria-kriteria tambahan), sistem stokastik (tak tentu, yang berdasarkan pada teorema probabilitas), sistem kendali adaptif (yang mempunyai kemampuan untuk beradaptasi), sistem kendali yang mampu untuk belajar (learning control system) yang merupakan metoda dalam intelegensia buatan; sampai dengan sistem kendali komputer (computer control system).
II.1.1 Definisi dan pengertian sistem kendali
Sistem kendali adalah hubungan antara komponen yang membentuk sebuah konfigurasi sistem yang akan menghasilkan tanggapan sistem yang diharapkan. Diagram blok sistem kendali secara umum digambarkan sebagai berikut
Gambar II.1. Diagram blok sistem kendali secara umum
Masukan dan keluaran merupakan variabel atau besaran fisik. Keluaran merupakan hal yang dihasilkan oleh kendalian (yang dikendalikan) sedangkan
24 Kendalian
(Plant)
e ω
masukan adalah yang mempengaruhi kendalian (keluaran). Kedua dimensi masukan dan keluaran tidak harus sama. Sebagai contoh sistem pengendali kecepatan motor DC berikut ini.
Gambar II.2. Diagram blok sistem kendali kecepatan pada motor DC
Masukan e berupa tegangan sementara keluarannya berupa kecepatan sudut
ω sehingga pengaturan kecepatan sudut diatur dengan pengaturan pemberian tegangan yang diberikan ke motor.
II.1.2 Sistem kendali loop terbuka dan loop tertutup
Sistem kendali loop terbuka (loop terbuka system) adalah sistem kendali yang tidak terdapat elemen yang mengamati keluaran yang terjadi untuk dibandingkan dengan masukannya (yang diinginkan) meskipun menggunakan sebuah pengendali (controller) untuk memperoleh tanggapan yang diinginkan. Sebagai contoh pada pengendalian kecepatan putaran motor DC dengan loop terbuka digambarkan sebagai berikut
Gambar II.3. Diagram sistem kendali kecepatan secara loop terbuka
Adapun sistem kendali loop tertutup atau disebut juga sistem kendali umpan balik (feedback control system) adalah sistem kendali yang mempunyai elemen umpan balik yang berfungsi untuk mengamati keluaran yang terjadi untuk dibandingkan dengan masukannya (yang diinginkan). Selisih antara set point dengan umpan balik digunakan sebagai masukan komputasi untuk menentukan seberapa besar nilai sinyal kendali yang diberikan ke plant sehingga parameter-parameter kendali yang diharapkan dapat implementasikan. Diagram blok sistem kendali secara loop tertutup digambarkan sebagai berikut.
Kendali Plant Kecepatan Set point
25
Gambar II.4. Diagram sistem kendali kecepatan secara loop tertutup Pada sistem loop tertutup, kemampuan regulasi dapat ditingkatkan akan tetapi isu kestabilan menjadi hal yang penting karena mungkin saja koreksi terhadap error yang terjadi dapat menyebabkan osilasi sehingga sistem tidak stabil..
II.1.3 Kinerja sistem kendali
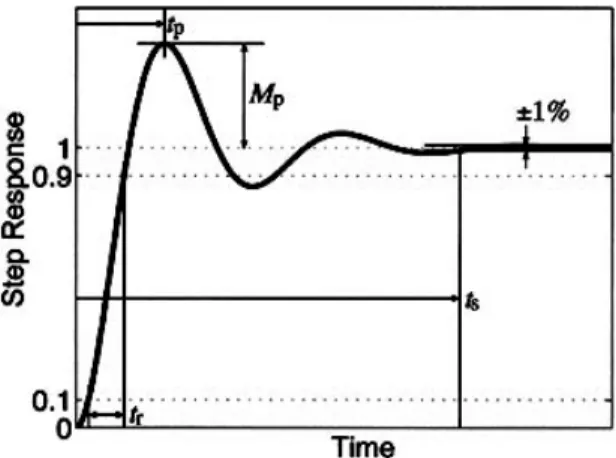
Kinerja sistem kendali sangatlah penting sehingga pada proses perancangan dan pengembangan sistem, parameter-parameter kinerja menjadi acuan hasil yang diharapkan. Kinerja sistem pada domain waktu dengan masukan step merupakan acuan yang umum digunakan. Kinerja sistem dengan masukan step dalam domain waktu, dinyatakan dalam grafik berikut ini.[2]
Gambar II.5. Kinerja sistem kendali dalam domain waktu
Secara umum, karakteristik sistem tersebut dinyatakan:
• Waktu tunda (delay time), td adalah waktu yang diperlukan respon mencapai 50% nilai akhir pada pertama kali
• Waktu naik (rise time), tr adalah waktu yang diperlukan respon untuk naik 0% sampai 100% dari nilai akhirnya (untuk redaman kurang) atau dari 10% sampai dengan 90% dari nilai akhirnya (untuk redaman lebih)
Kendali Plant Umpan balik Kecepatan Set point + _ Error
26
• Waktu puncak (peak time), tp adalah waktu yang diperlukan respon untuk mencapai puncak simpangan yang pertama kali
• Lewatan maksimum (maximum overshoot), Mp adalah perbandingan antara puncak tertinggi dari kurva respon terhadap nilai akhir respon.
• Waktu penetapan (settling time), ts adalah waktu yang diperlukan agar kurva respon mencapai dan tetap berada di dalam batas-batas yang dekat dengan nilai akhir.
II.2 Logika fuzzy
Teori himpunan fuzzy pertama kali diperkenalkan oleh Prof. Lotfi A Zadeh pada tahun 1965 dalam papernya yang berjudul “Fuzzy Sets”. Logika fuzzy lahir berdasarkan fenomena-fenomena alam yang tidak dapat dinyatakan dengan logika bolean. Misalnya suhu udara yang lebih dari 300C dinyatakan panas dan yang kurang dari 300C dinyatakan dengan dingin, lalu jika suhu 29,990C dalam kehidupan nyata apakah dapat dikatakan dengan dingin dan suhu 30,010C dikatakan dengan panas? Tentu sangat tidak adil jika perubahan hanya 0.01 0C dijadikan acuan justifikasi panas/dingin. Dengan logika fuzzy maka permasalahan ini dapat direpresentasikan dengan lebih baik yakni adanya parameter himpunan fuzzy dan derajat keanggotaan. Penggunaan logika fuzzy sangat luas dari peralatan industri, diagnosa penyakit dalam bidang kedokteran, pemodelan sistem pemasaran, riset operasi dalam bidang ekonomi, klasifikasi dan pencocokan pola, bidang kendali dan lain sebagainya.
II.2.1 Himpunan crisp dan himpunan fuzzy
Himpunan crisp A didefinisikan oleh item-item yang ada pada himpunan itu. Jika a∈ A, maka nilai yang berhubungan dengan a adalah 1, namun jika a∉A maka nilai yang berhubungan dengan A adalah 0. Adapun himpunan fuzzy didasarkan pada gagasan untuk memperluas jangkauan fungsi karakteristik sedemikian hingga fungsi tersebut akan mencakup bilangan real pada interval [0,1]. Nilai keanggotaannya menunjukkan bahwa suatu item tidak hanya bernilai benar atau salah, nilai 0 menunjukkan salah, nilai 1 menunjukkan benar akan tetapi juga nilai-nilai yang terletak antara 0 dan 1. Misalkan saja klasifikasi umur didasarkan sebagai berikut:
27 Setengah baya 35 55 Umur µ[x] 1 0 35
MUDA umur < 35 tahun
SETENGAH BAYA 35 ≤ umur ≤ 55 tahun TUA umur > 55 tahun
Dengan pendekatan crisp, sangat tidak adil jika umur 34 tahun dinyatakan muda dan 35 dinyatakan setengah baya.
Gambar II.6. Klasifikasi umur dengan pendekatan crisp
Adapun dalam logika fuzzy, derajat keanggotaan dalam rentang 0 sampai dengan 1 sehingga sebuah klasifikasi nilai dapat direpresentasikan dengan lebih baik.
II.2.2 Fungsi keanggotaan (membership function)
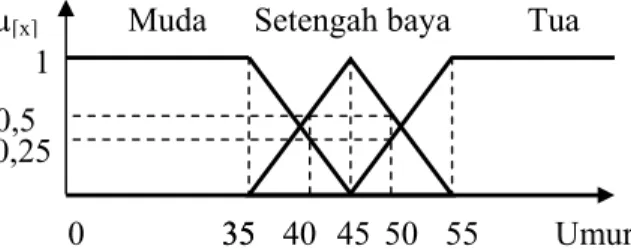
Fungsi keanggotaan adalah suatu kurva yang menunjukkan pemetaan titik-tiik masukan data ke dalam nilai keanggotaannya (derajat keanggotaan) yang memiliki nilai interval antara 0 dan 1. Misalkan saja pengklasifikasian umur seseorang yang dapat masuk dalam 2 himpunan berbeda, muda dan setengah baya, setengah baya dan tua. Seberapa besar keberadaannya dalam himpunan tersebut dapat dilihat pada nilai keanggotaannya, sebagai contoh dalam menyatakan umur dinyatakan dalam gambar berikut ini.
Gambar II.7. Klasifikasi umur dengan logika fuzzy Pada Gambar di atas terlihat bahwa :
• Seseorang yang berumur 40 tahun, termasuk dalam himpunan muda dengan µmuda [40] = 0,25; namun umur tersebut juga termasuk dalam himpunan setengah baya dengan µsetengah baya [40] = 0,5.
35 55 Umur µ[x] 1 0 35 Setengah baya Muda 45 Tua 50 40 0,5 0,25
28
• Seseorang yang berumur 50 tahun, termasuk dalam himpunan tua dengan µtua [50] = 0,25, namun umur tersebut juga termasuk dalam himpunan setengah baya dengan µsetengah baya [50] = 0,5.
Pada himpunan crisp, nilai keanggotaannya hanya ada dua kemungkinan, yaitu antara 0 atau 1, sedangkan pada himpunan fuzzy nilai keanggotaannya pada rentang antara 0 sampai dengan 1. Apabila x memiliki nilai keanggotaan fuzzy µA[x] = 0, berarti x tidak menjadi anggota himpunan A, juga apabila x memiliki nilai keanggotaan fuzzy µA[x] = 1 berarti x menjadi anggota penuh pada himpunan A.
Bentuk-bentuk fungsi keanggoataan yang umum seperti: fungsi linier (segitiga, trapesium), kuadratik, fungsi gaussian dan fungsi-fungsi yang spesifik. Bentuk fungsi manakah yang paling baik? Bentuk segitiga dan trapesium lebih populer karena kesederhanaan dan komputasi yang lebih mudah. Bentuk fungsi keanggotaan dengan 1 nilai disebut dengan singleton. Jika ingin menghasilkan keluaran yang lebih halus maka perlu digunakan fungsi dengan orde yang lebih tinggi. Berikut bentuk fungsi-fungsi yang umum digunakan dalam mendefinisikan fungsi keanggotaan.
a) Fungsi segitiga (b) Fungsi trapesium
(c) Fungsi gaussian (d) Fungsi kuadratik Gambar II.8. Bentuk-bentuk umum fungsi keanggotaan
Dalam tataran implementasi hardware, pemilihan bentuk fungsi keanggotaan juga perlu memperhatikan kemampuan komputasi hardware yang akan digunakan,
29
seperti misalnya bentuk fungsi gaussian perlu dukungan hardware yang mampu melakukan komputasi aritmatik yang lebih daripada bentuk fungsi segitiga atau trapesium.
II.2.3 Langkah pengembangan kendali fuzzy
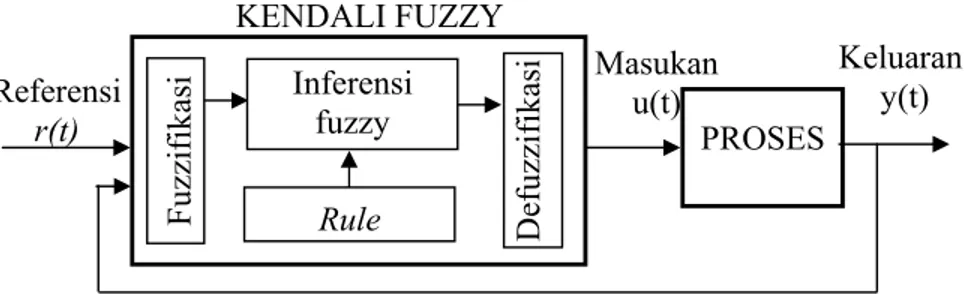
Langkah-langkah pengembangan kendali fuzzy digambarkan dalam diagram blok berikut ini.[1]
Gambar II.9. Diagram blok pengembangan kendali fuzzy
• Fuzzifikasi, yakni pemetaan nilai-nilai masukan (masukan crisp) yang berasal dari sistem yang dikontrol (besaran non fuzzy) ke dalam himpunan fuzzy menurut fungsi keanggotaannya. Untuk mengubah masukan crisp menjadi masukan fuzzy, terlebih dahulu harus menentukan fungsi keanggotaan untuk tiap masukan crisp, kemudian proses fuzzyfikasi akan mengambil masukan crisp dan membandingkan dengan fungsi keanggotaan yang telah ada untuk menghasilkan harga masukan fuzzy. Himpunan fuzzy tersebut merupakan masukan fuzzy yang akan diolah secara fuzzy pada proses berikutnya.
• Inferensi fuzzy, yakni pemetaan himpunan masukan ke himpunan keluaran dengan prinsip logika fuzzy (aturan jika-maka). Pada tahap ini, diproses hubungan antara nilai-nilai masukan dan nilai-nilai keluaran yang dikehendaki melalui aturan-aturan (rules) yang didefinisikan. Aturan ini nantinya yang akan menentukan respon sistem terhadap berbagai kondisi dan gangguan yang terjadi pada sistem. Rules yang dipakai adalah jenis “if - then“. Berikut ini contoh rules, “Jika Error NB dan CE NB maka Keluaran NB “ Pada penggunaan dua antecendent atau lebih, untuk mempermudah dapat digunakan matriks. Proses inferensi fuzzy akan mengevaluasi masukan fuzzy yang didapat dari proses fuzzifikasi untuk tiap antecendent dari rule dengan
Referensi r(t) Fuzzi fikasi D efuzzifikas i Inferensi fuzzy Rule PROSES Masukan u(t) Keluaran y(t) KENDALI FUZZY
30
menentukan rule strength dari tiap-tiap rule, karena antecendent dihubungkan dengan operator AND maka rule strength diambil dari strength value yang terkecil dari antecendent.
• Defuzzifikasi yakni proses pemetaan dari himpunan fuzzy hasil inferensi ke dalam aksi kendali non fuzzy (crisp keluaran). Ada beberapa metoda yang umum dalam proses defuzzyfikasi seperti: centre of area/gravity, centre of largest area, first of maxima/last of maxima, middle of maxima dan mean of maxima.
II.2.4 Contoh aplikasi fuzzy dalam kehidupan sehari-hari
Kendali fuzzy sudah banyak diimplementasikan dalam banyak perangkat, sebagai contoh diantaranya:[1]
• Kontroller neuro-fuzzy pada mesin cuci Matsushita Electric Group.
Dengan kendali fuzzy, mesin cuci mampu menentukan jumlah putaran secara otomatis berdasarkan jenis dan banyaknya kotoran, serta jumlah pakaian yang dicuci.
Gambar II.10. Mesin cuci dengan teknologi kendali fuzzy • Kendali fuzzy untuk transmisi gigi otomatis pada mobil produksi Nissan.
Kendali fuzzy pada transmisi gigi otomatis ini mampu menghemat penggunaan bahan bakar 12-17 persen.
31 • Rice cooker National/®Panasonic®
Kendali fuzzy digunakan untuk mengatur kandungan air dalam masakan
Gambar II.12. Rice cooker dengan kendali fuzzy
Dan masih banyak lagi aplikasi kendali fuzzy yang telah diimplementasikan dalam kehidupan sehari-hari seperti:
• Kendali otomatis pada bendungan oleh Tokyo Electric Power.
• Penyederhanaan kendali pada robot oleh Hirota, Fuji Electric,Toshiba dan Omron
• Prediksi gempa bumi oleh Seismology Bureau of Metrology, Jepang. • Diagnosa kanker oleh Kawasaki Medical School
• Kendali pada vacum cleaner oleh Matsushita • Dan lain-lain
II.2.5 Kelebihan dan kekurangan kendali fuzzy
Kendali fuzzy mempunyai kelebihan-kelebihan dibanding kendali konvensional, seperti:[1]
• Kendali fuzzy lebih dapat beroperasi dengan baik pada lingkungan yang banyak terdapat gangguan.
• Desain kendali fuzzy lebih murah dan memberikan hasil yang lebih baik dibanding kendali dengan berbasiskan pemodelan
• Kendali fuzzy lebih mudah untuk dikostumisasi dengan melakukan tuning rulenya
• Kendali fuzzy lebih mudah untuk dipelajari dan lebih mudah dalam melakukan desain untuk diaplikasikan dalam kehidupan nyata.
32
Adapun kekurangan-kekurangan pada kendali fuzzy seperti:[5] • Secara matematis belum ada jaminan kestabilan sistem
• Tidak adanya kemampuan belajar, kondisi ini kemudian diatasi dengan neuro fuzzy.
• Penentuan bentuk fungsi keanggotaan dan jumlah rule yang paling optimal tidak selamanya mudah.
• Proses verifikasi dan validasi pada fuzzy expert system perlu dilakukan testing extra.
II.3 PWM (Pulse width modulation)
PWM merupakan mekanisma utuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low, dimana kita dapat mengontrol durasi sinyal high dan low sesuai dengan yang kita inginkan. Duty cyle merupakan prosentase periode sinyal high dan periode sinyal, prosentase duty cycle akan berbanding lurus dengan tegangan rata-rata yang dihasilkan. Berikut ilustrasi sinyal PWM, misalkan kondisi high 5 V dan kondisi low 0 V.
Gambar II.13. PWM dengan variasi duty cycle
Pembangkitan sinyal PWM menggunakan fungsi timer/counter yang dibandingkan nilainya dengan sebuah register tertentu. Beberapa mikrokontroller,
clk pwm_o
a) Duty cyle 25% , V rata-rata 1,25 V
clk pwm_o
b) Duty cyle 50% , V rata-rata 2,5 V
clk pwm_o
s s I n a r y P d D seperti yang secara built II.3.1 PWM Dala nilai register akan selalu d register TCN yang dikelua Pada PWM dirumuskan fPWM DPWM Dimana: fPWM fosc N D g penulis gun in sehingga M mode pha am ATMega r counter TC dibandingka NTx dengan arkan melalu Gam M 8 bit, mak M= 512 Nx fosc M = 255 OCRxx M = Frekuen = Frekuen = Skala clo = Duty cyc nakan (ATM mempermud ase correct 8535 dapat CNTx yang m an dengan re n OCRx dig ui sebuah pin mbar II.14. P ka frekuens 100% si PWM si osilator ock cle 33 Mega 8535) dah dalam p dihasilkan P mencacah na egister pemb gunakan un n Ocx sepert PWM mode si dan duty telah menye engembanga PWM mode aik dan turun
anding OCR tuk memban ti dalam gam phase corre cycle pada ediakan fasi an. e phase corr n secara teru Rx. Hasil per ngkitkan sin mbar berikut ect a mode pha litas PWM rect dimana us menerus rbandingan nyal PWM ini [9] ase correct
I T b P d D I P r s d II.3.2 PWM Pada m TCNTx me berikut ini [9 Pada PWM dirumuskan fPWM DPWM Dimana: fPWM Fosc N D II.3.3 Pre s Pre skalar register TCN setiap 8 sikl dalam gamb M mode fas mode fast h encacah naik 9] M 8 bit, mak M= 256 Nx fosc M = 255 OCRx x M = Freku c = Freku = Skala = Duty c skalar pada merupakan NT dapat dia lus clock. Pe bar berikut in t hampir sama k tanpa me Gambar II ka frekuens 100% ensi PWM ensi kristal clock cycle a PWM faktor pen atur. Misalka erbedaan ant ni 34 a dengan mo encacah turu I.15. PWM m si dan duty ngali clock an pre skala tara tanpa da ode phase c un seperti t mode fast cycle pada (skala clock r 8 berarti b an dengan pr correct, han terlihat dala a mode pha k) sehingga ahwa TCNT re skalar dii nya register am gambar ase correct a frekuensi T akan naik ilustrasikan
D k f I m d p a t d s y b p Dengan mem kita dapat m frekuensi os II.3.4 Anal Pada menggunaka dahulu sesu pengendalian antara sinya tegangan rat diberikan ke secara halus yang diguna berupa teg pembuangan Gamba Gambar masukkan fa membuat fre ilator. log vs PWM awalnya, p an tegangan uai dengan d n motor DC al high deng ta-ratanya. T e plant. Kare s, tidak terse akan untuk gangan mak n daya ditra ar II.16. (a) T II.16. (b) Tim aktor preska ekuensi PW M pada peng engendalian analog. Teg daerah kerja C dengan PW gan keseluru Tegangan ra ena frekuens entak. Deng menggerak ksimalnya ansistor dapa 35 Timer/counte mer/counter alar dalam m WM yang be gendali mot n kecepatan gangan analo a plant sebe WM, tegang ruhan sinyal ata-rata ini y i PWM yang an PWM ju kkan motor atau tidak at dihindari, er tanpa pres dengan pres menentukan f eragam, tida tor DC motor DC og ini kemud elum diberik gan PWM te l yang diatu yang kemudi g tinggi, mak uga dapat dit karena tega k diberikan beda halny skalar skalar 8 frekuensi PW ak harus sam C yang umu dian dikuatk kan ke plan etap akan te ur untuk me ian dikuatka ka motor aka tekan kehila angan yang n tegangan ya dalam pe WM, maka ma dengan um dengan kan terlebih nt. Adapun etapi durasi endapatkan an sebelum an berputar angan daya g diberikan sehingga ngendalian
m m P s M motor secara motor secara Gambar II. Pengendalia seperti: com MOSFET da (a) (c) Tran Gamb a analog. Be a analog dan .17.(a) Penge secara anal an motor se mmon emitt aya. Berikut ) Common e nsistor daya bar II.18. Be erikut ilustra n secara PWM endalian mo log ecara analog ter, common rangkaian p emitter Darlington eberapa rangk 36 asi yang me M. otor (b) g dapat me n collector, pengendali m kaian penge enjelaskan pe Pengendalia enggunakan transistor motor secara (b) Com (d) MO ndalian mot erbedaan pe an motor sec beberapa k daya darli analog. mon collecto OSFET daya or secara an ngendalian cara PWM konfigurasi ngton dan or a nalog
37
Pada pengendalian motor secara analog, tegangan lebih yang digunakan motor dibuang ke transistor sehingga terjadi pemborosan daya. [3]
(a) Rangkaian ketika transistor
dalam keadaan half-on (b) Pemasangan transistor daya Gambar II.19. Transistor daya sebagai pengendali motor
Efisiensi penggunaan daya motor dinyatakan sebagai Efisiensi = Pmotor/Pmasukan
= (Vm x IA )/((Vcc x IA)+(VBE x IB)
Dimana VBE ≅ 0, 7 volt (Pada rangkaian Darlington 0,7 x n volt) dan IB jauh lebih kecil dari pada IA sehingga effisiensi dinyatakan sebagai
Efisiensi = Vmotor/Vmasukan
Adapun pada PWM, efisiensi daya dapat ditingkatkan karena tidak ada pembuangan daya ke transistor. Transistor bekerja dengan mode on atau off yang diatur periodenya secara PWM. Ketika sinyal dalam kondisi high, motor DC diberi tegangan, dalam kondisi low tegangan 0 diberikan, akan tetapi tidak berarti bahwa motor akan berhenti bergerak, kondisi ini seperti model pengayuhan pada sepeda, ketika sepeda dikayuh, sepeda mendapat energi untuk bergerak, akan tetapi ketika tidak dikayuh sepeda masih dalam keadaan bergerak dalam waktu tertentu. Karena frekuensi yang tinggi pada sinyal PWM, maka gerakan motor berjalan secara halus, tidak terasa tersentak.
Jadi, ada 2 keuntungan pengendalian motor DC dengan teknik PWM dibandingkan dengan analog:
• Peningkatan effisiensi daya karena tidak ada pembuangan daya lebih seperti pada pencatudayaan secara analog.
38
• Tidak memerlukan DAC ketika pengendali motor akan diintegrasikan dengan pengendali digital
II.4 Motor DC
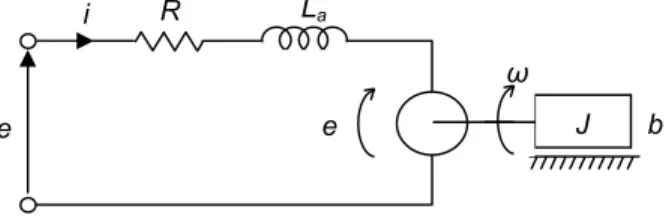
Motor merupakan perangkat listrik yang mengubah energi listrik menjadi energi mekanik. Motor DC banyak digunakan di berbagai peralatan karena torsinya yang besar seperti pada mesin bubut, mesin CNC, tracking antena atau sistem konveyer. Model motor DC yang disederhanakan terlihat dalam gambar di bawah ini
Gambar II.20. Model motor DC
Sistem motor DC yang mempunyai medan konstan dengan pengendalian pada armatur diperlihatkan pada gambar di atas. Resistansi dan induktansi armatur dinotasikan oleh Ra dan La. Tegangan balik motor em (t) dinyatakan sebagai:
1) -(2 ) ( ) (t K t em = bω
dimana θ merupakan posisi shaft motor, ω adalah kecepatan sudut shaft, dan Kb adalah konstanta dependent-motor. Jumlah momen inersia yang dihubungkan ke shaft motor adalah J, dan b adalah gesekan rekatan (viscous). Dengan memisalkan τ sebagai torsi yang dihasilkan oleh motor, kita tuliskan
dt d b dt d J θ θ τ = 22 + atau ω ω τ b dt d J + = (2-2) Torsi yang dihasilkan untuk motor ini diberikan oleh
(2.3) a T i K = τ i e R La e J b ω
39
dimana ia adalah arus armatur dan KT merupakan suatu konstanta. Persamaan akhir yang diperlukan untuk persamaan tegangan rangkaian armatur adalah
(2.4) m a a a a e dt di L R i e= + +
II.5 Kelinieran sistem
Pada umumnya, komputasi berbagai metode kendali menganggap bahwa plant adalah linier, padahal pada kenyataanya sulit sekali hardware linier sempurna. Untuk mengatasi ketidaklineran ini dapat menggunakan beberapa metoda, metoda yang mudah diimplementasikan dengan membuat lookup table atau membatasi sistem hanya pada daerah kerja liniernya saja.
II.6 Mikrokontroller (ATMega 8535)
ATMega8535 merupakan mikrokontroller keluarga AVR produksi Atmel. Mikrokontroler AVR ini memiliki arsitektur RISC 8 bit, dimana semua instruksi dikemas dalam kode 16 bit dan sebagian besar instruksi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Hal ini terjadi karena kedua jenis mikrokontroler tersebut memiliki arsitektur yang berbeda. AVR berteknologi RISC (Reduced Instruction Set Computing), sedangkan seri MCS51 berteknologi CISC (Complex Instruction Set Computing) Mikrokontroller ATMega8535 termasuk keluarga RISC produksi Atmel. Fitur-fitur pada ATMega8535 sebagai berikut:
• 130 macam instruksi yang hampir semuanya dieksekusi dalam 1 siklus clock
• 32 x 8 bit register serbaguna
• Kecepatan mencapai 16 MIPS dengan clock 16 MHz
• 8 Kbyte Flash Memori, yang memiliki fasilitas In-System Programming • 512 Byte internal EEPROM
• 512 Byte SRAM
• Programming lock, fasilitas untuk mengamankan kode program • 2 buah timer/counter 8-bit dan 1 buah timer/counter 16-bit • 4 saluran keluaran PWM
K • 8 cha • Seria • Mast • Seria • On-c Konfigurasi annel ADC 1 al USART ter/Slave SPI al TWI dan I chip analog
PIN dan ars
Gamb Ga 10-bit PI serial Inter I2C Comparator sitektur ATM bar II.21. Ko ambar II.22. 40 rface r Mega 8535 s onfigurasi pin Arsitektur A ebagai berik n ATMega 8 ATMega 853 kut 8535 35