GUNTUR RAHMAT JUNIAWAN
PROGRAM STUDI
FAKULTAS TEKNOLOGI MINERAL
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN” SKRIPSI
Oleh :
GUNTUR RAHMAT JUNIAWAN
113.09.0157 / TM
PROGRAM STUDI TEKNIK PERMINYAKAN FAKULTAS TEKNOLOGI MINERAL
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN” YOGYAKARTA
2011
TEKNIK PERMINYAKAN
iv
Dalam kinerjanya, pompa Sucker Rod harus selalu dimonitor, karena semakin lama suatu sumur diproduksikan maka tekanan reservoir akan semakin turun yang berdampak pada menurunnya ketinggian fluida. Untuk mengetahui ketinggian fluida didalam sumur maka harus dilakukan pengujian sumur menggunakan alat Sonolog. Hasil pengukuran sonolog tersebut digunakan sebagai salah satu data dasar dalam perhitungan meningkatkan kinerja pompa Sucker Rod.
Penelitian skripsi pada Sumur X lapangan ‘Y’ ini bertujuan untuk menentukan peningkatan produksi terhadap sumur X, dimana pada saat dilakukan penelitian tersebut sumur X sudah diproduksikan menggunakan pompa sucker rod dengan panjang langkah (S) 48 inchi, kecepatan pompa (N) 12 SPM dan laju produksi sebesar 63.2 BFPD. Dengan data pompa sucker rod saat ini didapat efisiensi volumetric sebesar 26.45%.
Optimasi ini dilakukan dengan menggunakan analisa nodal, yaitu perpotongan antara kurva Inflow Performance Relationship (IPR) metode Pudjo Sukarno dengan kurva Pump Intake N dan S. Hasil perpotongan kedua kurva tersebut diperoleh harga-harga N dan S versus laju produksi (q) yang baru. Dari perpotongan kurva S dan N versus laju produksi yang baru, didapatkan laju produksi optimum yang sesuai dengan potensi sumurnya
Hasil optimasi pompa sucker rod di Sumur X menunjukkan bahwa panjang langkah pompa (S) adalah 48 inchi, kecepatan pompa (N) yang diperoleh adalah 6 spm, dengan laju produksi (q) sebesar 72 bpd dan efisiensi volumetris pompa (Ev) adalah 60.91 %, yang berarti terjadi peningkatan efisiensi volumetric pompa dan laju produksi sehingga pompa dapat dikatakan bekerja dengan cukup efisien.
iii
Bismillahirrahmaanirrohiim,,
Skripsi ini saya persembahkan khusus kepada :
1.
Allah SWT. yang telah memberikan keselamatan dan kesehatan
sehingga dapat menyelesaikan skripsi ini dengan baik., Yaa Allah
hilangkanlah kesombonganku Teguhkanlah Keberanianku untuk
slalu dijalanMu mudah-mudahan rahmat dan hidayahNya selalu
terlimpah kepada kita semua. Amiin
2.
Do’a yang Tak terputus teruntuk kedua Orangtua(alm) tercinta,
BaPa,Mih..Terimakasih atas doa airmata serta kasihsayang yang
diberikan,,
3.
Aa Teteh tercinta , semua keponakan yang tersayang terima kasih atas
dukungan,kepercayaan,kasih tulus yang selalu ada.. Terimakasih,,
4.
Is,,Teman-teman Sahabat Karib,,Agung,Dito,Yudhi,Nono,
Oliver Offshore Crew 02 keluargaku djogja,, Sahabat Awet SMA
in my homeland,,
5.
Pak Agus Widiyarso dan Pak Lela,terimakasih atas bimbingan
dalam menyelesaikan skripsi ini.
v
Hidayah-Nya sehingga penulis dapat menyelesaikan Skripsi ini dengan judul “Optimasi Pompa Sucker Rod Berdasarkan Analisa Sonolog Pada Sumur X
Lapangan ‘Y’ ”. Skripsi ini dibuat untuk memenuhi salah satu syarat untuk
mendapatkan gelar Sarjana Teknik di Program Studi Teknik Perminyakan, Fakultas Teknologi Mineral UPN “Veteran” Yogyakarta.
Dengan selesainya Skripsi ini, penulis mengucapkan terimakasih yang sebesar-besarnya kepada :
1. Bapak Prof. Dr. H. Didit Welly Udjianto, MS., selaku Rektor UPN “Veteran” Yogyakarta.
2. Bapak Dr. Ir. S. Koesnaryo, Msc., selaku Dekan Fakultas Teknologi Mineral.
3. Bapak Ir. Anas Puji Santoso, MT., selaku Ketua Jurusan Teknik Perminyakan.
4. Bapak Ir. H. Avianto Kabul P, MT., selaku Sekretaris Jurusan Teknik Perminyakan.
5. Bapak Ir. Agus Widyarso, MT., selaku Pembimbing I Skripsi. 6. Bapak Ir. Y. Lela Widagda, Msi., selaku Pembimbing II Skripsi.
7. Segenap staf pengajar, karyawan, dan civitas akademika Program Studi Teknik Perminyakan UPN “Veteran” Yogyakarta.
Dalam menyelesaikan Skripsi ini penulis menyadari bahwa masih banyak kekurangan, untuk itu penulis sangat mengharapkan kritik dan saran yang membangun untuk kesempurnaan Skripsi ini. Semoga Skripsi ini bermanfaat bagi penulis, maupun pihak-pihak yang membutuhkan serta demi kemajuan ilmu pengetahuan.
Yogyakarta, September 2011
vi
Halaman
HALAMAN JUDUL ... i
HALAMAN PENGESAHAN ... ii
HALAMAN PERSEMBAHAN ... iii
RINGKASAN ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vi
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... ix
DAFTAR LAMPIRAN ... x
BAB I. PENDAHULUAN ... 1
BAB II. TEORI DASAR ... 4
2.1. Sonolog ... 4
2.1.1. Peralatan Sonolog 4 2.1.2. Prinsip Kerja Sonolog 5 2.2. Produktivitas Formasi ... 11
2.2.1. Produktivity Index (PI) ... 11
2.2.2. Inflow Performance Relationship (IPR) ... 13
2.2.2.1. IPR Tiga Fasa Pudjo Sukarno ... 14
2.3. Pompa Sucker Rod ... 17
2.3.1. Peralatan Pompa Sucker Rod... 20
2.3.2. Prinsip Kerja Pompa Sucker Rod ... 30
2.3.3. Analisa Peralatan Pompa ... 31
2.3.3.1. Analisa Gerakan Rod ... 31
2.3.3.2. Sucker Rod String ... 33
2.3.3.3. Effective Plunger Stroke ... 33
2.3.3.4. Kecepatan Pompa ... 43
2.3.3.5. Perhitungan Counter Balance ... 44
vii
2.3.4. Kapasitas Pompa ... 47
2.3.5. Efisiensi Total Pompa Sucker Rod ... 47
2.3.5.1 Beban Polished Rod ... 47
2.3.5.2 Hidraulic Horse Power ... 49
2.3.5.3 Brake Horse Power ... 50
2.3.5.4 Penentuan Efisiensi Total Pompa ... 50
2.3.6. Perhitungan Optimasi Pompa ... 52
BAB III. OPTIMASI POMPA SUCKER ROD 56
3.1. Pembuatan Kurva IPR Pudjo Sukarno 58
3.2. Evaluasi Efisiensi Volumetris Pompa Sucker Rod Kondis Terpasang Pada Sumur X... 61
3.3. Optimasi Pompa Sucker Rod Pada Sumur X ... 65
BAB IV. PEMBAHASAN 76
BAB V. KESIMPULAN 78
DAFTAR PUSTAKA 79
viii
Halaman
BAB II.
Gambar 2.1. Peralatan pengukur BHP Secara Akustik ... 5
Gambar 2.2. Grafik Kecepatan Suara Pada Gas Hidrokarbon ... 7
Gambar 2.3. Menghitung Liquid Level dengan Tubing Colar... 8
Gambar 2.4. Grafik Untuk Mencari fo ... 9
Gambar 2.5. Beam Pumping System 18
Gambar 2.6. Conventional Unit ... 19
Gambar 2.7. Mark II... 19
Gambar 2.8. Air Balanced ... 19
Gambar 2.9. Peralatan Di Bawah Permukaan ... 23
Gambar 2.10. Poorman Type Gas Anchor ... 25
Gambar 2.11. Packer Type Gas Anchor... 25
Gambar 2.12. Sucker Rod String ... 26
Gambar 2.13. Klasifikasi Pompa Menurut API ... 27
Gambar 2.14. Mekanisme Kerja Sucker Rod... 30
Gambar 2.15. Sistem Gerakan Sucker Rod ... 31
Gambar 2.16. Hubungan Kolom Fluida Dengan Tekanan ... 36
Gambar 2.17. Getaran Yang Terjadi Pada Rod String ... 44
Gambar 2.18. Gaya Yang bekerja Pada Crank ... 46
Gambar 2.19. Grafik Perpotongan IPR vs Pump Intake ... 55
BAB III. Gambar 3.1. Kurva IPR Sumur X ... 72
Gambar 3.2. Kurva IPR vs Kurva Pump Intake N ... 73
Gambar 3.3. Kurva IPR vs Kurva Pump Intake S ... 74
ix
Halaman
BAB II.
Tabel II-1. Konstanta Cn Untuk Masing-masing An ... 15
Tabel II-2. Jenis dan Ukuran Pompa Maksimum ... 28
Tabel II-3. Klasifikasi Pompa Sucker Rod di Bawah Permukaan ... 29
Tabel II-4. Kombinasi Untuk Sucker Rod ... 34
Tabel II-5. Data Sucker Rod ... 38
Tabel II-6. Data Tubing... 38
Tabel II-7. Data Plunger Pompa... 39
Tabel II-8. Data Rod dan Pompa ... 40
BAB III. Tabel III-1. Hasil Perhitungan Laju Alir Pada Berbagai Harga Pwf ... 60
Tabel III-2. Hasil Perhitungan Evaluasi Pompa Kondisi Terpasang ... 64
Tabel III-3. Hasil Perhitungan Persamaan Pump Intakedengan N asumsi ... 66
Tabel III-4. Hasil Perhitungan Persamaan Pump Intake dengan S asumsi ... 67
Tabel III-5. Hasil Perhitungan Perpotongan Kurva IPR dengan N ... 67
Tabel III-6. Hasil Perhitungan Perpotongan Kurva IPR dengan S ... 67
x
Halaman
Lampiran A. Analisa Sonolog ... 81
Lampiran B. Diagram Sumur ... 84
Lampiran C. Data Differential Liberation ... 86
Lampiran D. Data Kecepatan Maksimum Pompa ... 88
Lampiran E. Konversi Satuan ... 89
1
Ketika tekanan reservoir tidak cukup lagi untuk memproduksikan fluida pada laju alir yang ekonomis maka metode artificial lift dapat diterapkan untuk membantu mengangkat fluida produksi ke permukaan. Sucker rod pump merupakan artificial lift yang digunakan pada sumur X. Prinsip kerja sucker rod merupakan perpaduan gerak antara peralatan di permukaan dan di bawah permukaan.
Sumur X terletak di Pulau Sumatera bagian utara tepatnya di Rantau, DI Aceh. Pada bulan September 2003 Sumur X selesai dibor sampai kedalaman 1098 m dan mempunyai 8 lapisan produktif, antara lain Z.940 (984.5 - 987, 988 - 989.5) m, Z.930 (964.5 – 966.5) m, Z.920 (956.5 – 958.5) m, Z.810 (821 – 825) m, Z.770 (770.5 – 772) m, Z.750 (760 – 762) m, Z.640 (663 – 664.5) m dan Z.630 (655 – 656.5) m. Pada skripsi ini lapisan produktif yang di analisa yaitu, zona produktif Z.630 (655 – 656.5) m dengan Bears Plug dipasang pada kedalaman 660 m. Sumur X menggunakan pompa Sucker Rod dalam memproduksikan fluida formasinya, pada saat ini sumur X beroperasi dengan panjang langkah 48 inchi dengan kecepatan pemompaan sebesar 12 SPM untuk menghasilkan laju produksi sebesar 63.2 BFPD. Dalam kinerjanya, pompa Sucker Rod tersebut harus selalu dipantau, karena semakin lama suatu sumur diproduksikan maka tekanan reservoir akan semakin turun yang berdampak pada menurunnya ketinggian fluida. Untuk mengetahui ketinggian fluida didalam sumur maka harus dilakukan pengujian sumur menggunakan alat Sonolog.
Sonolog adalah suatu alat yang menggunakan rambatan suara untuk mengukur kedalaman fluida didalam sumur yaitu antara lain Static Fluid Level (SFL) untuk sumur keadaan mati dan Dynamic Fluid Level (DFL) untuk sumur keadaan berproduksi. Data hasil dari pengukuran sonolog tersebut diperlukan pada perencanaan setting pompa dalam hal ini menentukan kedalaman pompa,
panjang langkah dan kecepatan pompa yang diukur dengan satuan SPM (Stroke Per Menit), sonolog dipasang pada casing valve.
Pengukuran sonolog pada sumur X dilakukan dua kali, yaitu pada tanggal 14 Januari 2011 dan 16 Januari 2011. Hasil pengukuran sonolog yang pertama didapatkan harga Dynamic Fluid Level (DFL) 609.42 m dan pada pengukuran sonolog yang kedua didapatkan harga Static Fluid Level (SFL) 494.02 m. Kedalaman pompa saat ini adalah 615.45 m.
Latar belakang dari penulisan Skripsi ini adalah karena semakin lama suatu lapangan diproduksikan maka tekanan reservoir akan semakin turun dan berdampak terhadap menurunnya kapasitas produksi formasi sehingga kapasitas produksi pompa yang terpasang tidak sesuai lagi dengan kapasitas produksi formasi tersebut, hal ini berdampak terhadap penurunan efisiensi volumetric pompa terpasang sehingga perlu dilakukannya upaya optimasi efisiensi volumetric pompa terpasang dengan menyesuaikan kapasitas produksi pompa dengan kapasitas produksi formasi sehingga diharapkan sumur dapat berproduksi secara optimum.
Maksud dan tujuan dari penelitian ini adalah untuk melakukan evaluasi terhadap efisiensi volumetric pompa terpasang dengan melakukan perhitungan evaluasi dan menganalisa terhadap data sonolog yang tersedia, kemudian melakukan upaya optimasi efisiensi volumetric dengan melakukan perencanaan ulang terhadap panjang langkah (S) dan jumlah stroke pompa (N).
Metode penyelesaian dilakukan baik menggunakan perhitungan evaluasi terhadap pompa terpasang maupun dengan menganalisa data sonolog sehingga dapat ditentukan efisiensi volumetric pompa terpasang, kemudian dilakukan upaya optimasi dengan melakukan perhitungan optimasi yaitu dengan cara menyesuaikan kapasitas produksi pompa terpasang dengan kapasitas produksi formasi untuk mencapai laju produksi optimum teoritis yang diharapkan.
Pada penulisan skripsi ini penulis menggunakan sistem pembagian per-bab dengan sistematika sebagai berikut : Bab I Pendahuluan merupakan penjelasan isi skripsi secara umum mengenai latar belakang penelitian, maksud dan tujuan penelitian, metode penyeselesaian dan sistematika penulisan. Bab II Teori dasar
sonolog, produktivitas formasi dan sucker rod pump, yang berisi tentang jenis, peralatan, prinsip kerja, dan disain pompa. Bab III Evaluasi dan optimasi pompa sucker rod pada data hasil pengukuran sonolog. Bab IV berisi pembahasan dan Bab V merupakan bab kesimpulan dan saran.
4
2.1. Sonolog
Sonolog bekerja berdasarkan prinsip gelombang suara atau getaran. Dalam operasinya, sumber gelombang suara dapat berasal dari penembakan peluru hampa (blank cartridge) atau pengaliran gas bertekanan secara cepat dan dalam waktu yang sangat singkat (hanya sesaat). Untuk sumur-sumur dengan tekanan gas di Casing sangat rendah, digunakan sumber gas N2 atau gas CO2 yang berasal dari tabung gas bertekanan tinggi. Tetapi bila tekanan gas di Casing cukup tinggi, maka dengan mengablas gas tersebut dengan cepat dan singkat, akan diperoleh sumber bunyi yang diperlukan untuk pengukuran.
Gelombang suara atau getaran tersebut dipancarkan ke dalam annulus antara Tubing dan production Casing, dan merambat melalui Tubing ke bawah sampai ke permukaan cairan, di mana ia dipantulkan kembali ke permukaan dan ditangkap oleh microphone yang dipasang di permukaan, dimana pantulan suara tersebut dirubah menjadi pulsa-pulsa listrik yang kemudian diperkuat oleh
amplifier dan direkam di recorder. Selama merambat melalui Tubing, setiap kali
suara sampai ke sok (Tubing collar) sebagian getaran akan dipantulkan ke permukaan dan ditangkap oleh microphone. Dengan demikian setiap tubing collar akan memberikan pantulan kecil yang direkam oleh recorder. Sesampai di permukaan cairan, pantulan suara oleh permukaan cairan akan dipantulkan lagi ke permukaan dan menghasilkan efek yang sama dengan pancaran suara yang pertama, dengan intensitas yang makin lemah, sehingga rekaman pantulan-pantulan suara tersebut akan berlangsung berulang-ulang sampai suara tersebut kehabisan energinya.
2.1.1. Peralatan Sonolog
Gambar 2.1. memperlihatkan peralatan dan prinsip kerja peralatan serta
PRINSIP KERJA ALAT
NOTEBOOK N2 GAS CHAMBER
SOLENOID VALVE N2 PRESS. GAGE N2 BOTTLE MICROPHONE PRESSURE TRANSDUCER WELL ANNULUS G AS SONIC CALCULATION T1 = Sonic travel time, sec V = Sonic velocity in gas, ft/sec L = Liquid level depth, ft D = Perforation depth, ft Pcsg = Casing pressure, psi ρliq = Liquid density, gr/cm3
Pgas = Gas column pressure, psi Pliq = Liquid column pressure, psi fo = Liquid fraction
L = T1*0.5*V ft Pgas = (Pcsg *L)/30000 psi Pliq = 0.433*(D-L)* ρliq * fo psi BHP = Pcsg + Pgas + Pliq L IQ U ID PERFORATION Gambar 2.1
Peralatan yang diperlukan antara lain:
1. Gas Gun. Alat ini digunakan untuk menghasilkan bunyi dipermukaan. Gas
gun diperlengkapi dengan mikrofon, thermometer, manometer pengukur tekanan di selubung yang biasanya berujud peralatan digital serta manometer pengukur tekanan pada Gas Chamber yang merupakan sumber bunyi. Untuk mengaktifkan gun dipasang pula Solenoid valve yang bisa dioperasikan secara elektrik.
2. Analog Digital Converter. Alat ini digunakan untuk mengolah data dari
sensor agar dapat diterima oleh komputer dan mengolah perintah dari komputer agar dapat dieksekusi oleh sensor.
3. Komputer untuk mengolah data menghitung dan memprogram perintah. Biasanya komputer sudah dilengkapi dengan software untuk perhitungan ini.
4. Catu gas. Umumnya dipakai gas yang tidak bereaksi dengan hidrokarbon seperti N2 atau CO2. Botol nitrogen sebagai sumber gas dilengkapi dengan pressure regulator yang memadai.
5. Peralatan tambahan seperti pipa-pipa penghubung gas gun dengan well head.
2.1.2. Prinsip Kerja Peralatan Sonolog
Prinsip Kerja alat ini adalah sebagai berikut:
1. Gas Gun dipicu untuk menimbulkan bunyi yang kemudian merambat di
annulus dan dipantulkan oleh permukaan cairan. Pantulan (selama proses berlangsung bunyi direkam secara terus menerus) akan diterima oleh mikrofon dan komputer akan menghitung waktu yang dipergunakan bunyi untuk merambat dari permukaan, dipantulkan oleh permukaan cairan sampai kembali ke permukaan.
2. Untuk menghitung jarak dari permukaan ke permukaan liquid level digunakan rumus:
L = T1 x 0.5 x V ...(2-1) Keterangan :
L = Jarak dari wellhead ke permukaan cairan, feet
T1 = Waktu tempuh ulang-alik dari wellhead ke permukaan cairan, detik V = Kecepatan suara, feet/detik
Seperti diterangkan diatas waktu telah diukur dan dicatat oleh komputer sehingga tinggal mencari kecepatan suara. Kecepatan suara ditentukan oleh jenis dan kepadatan media. Di annulus media yang mengisinya adalah gas hidrokarbon,
Gambar 2.2 menunjukkan grafik untuk menghitung kecepatan perambatan suara
pada gas. Dengan data specific gravity dari gas dan data tekanan pada casing dapat dihitung kecepatan suara di annulus.
Gambar 2.2
Untuk menghitung tekanan dibawah permukaan (Bottom Hole Pressure =BHP) digunakan rumus:
BHP = Pcsg + Pgas + Pliq...(2-2) Keterangan :
BHP = Tekanan Bawah Permukaan, psi Pcsg = Tekanan Casing, psi
Pgas = Tekanan yang diakibatkan oleh adanya kolom gas dianulus, psi
Pliq = Tekanan yang diakibatkan oleh adanya kolom cairan dianulus, psi Pgas = (Pcsg x L)/30000
Pliq = 0.433 x (D-L) x ρliq. fo L = Kedalaman cairan , feet
D = Kedalaman formasi, feet fo = Fraksi cairan
ρliq = Densitas liquid gr/cm3
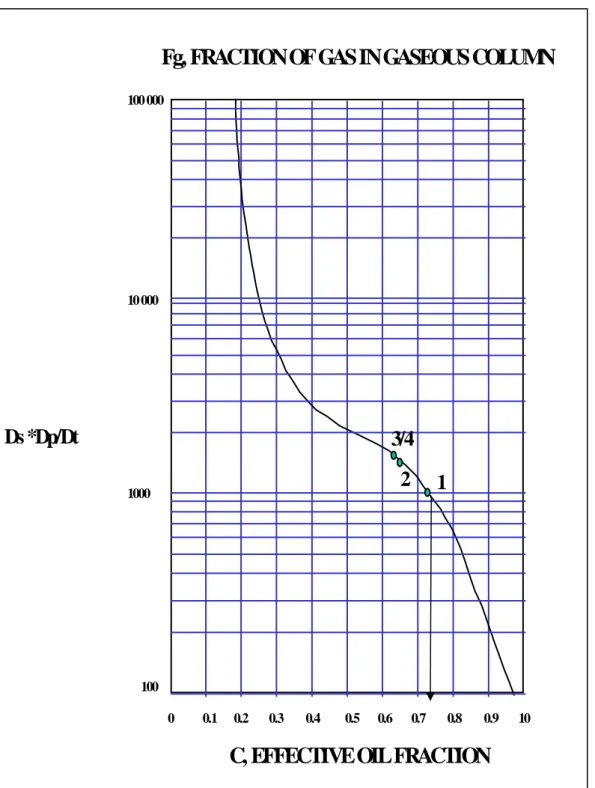
Untuk liquid yang bebas gas maka harga fo = 1, sedangkan untuk yang
mengandung gas dicari dengan menggunakan grafik (Gambar 2.4) dengan metoda yang dikemukakan oleh Mc Coy et al, (1988).
Gambar 2.3
Fg, FRACTION OF GAS IN GASEOUS COLUMN
100 000 10 000 1000 100 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10C, EFFECTIVE OIL FRACTION
Ds *Dp/Dt
1
2
3/4
Gambar 2.4. Grafik Untuk Mencari fo 8)
Prinsip pengukuran pada Gambar 2.4 umumnya dipakai untuk mengetahui liquid level pada sumur pompa Sucker Rod dengan peralatan yang umum dipakai oleh operator produksi adalah Sonolog.
Untuk mempermudah operasi dan perhitungan (terutama dalam hal pengukuran yang cepat dan banyak) penggunaan komputer dan piranti lunak umum dilakukan saat ini. Piranti lunak dapat memberikan signal untuk membuka valve sehingga terjadi ledakan secara otomatis serta menghitung secara otomatis. Pada sumur yang sedang produksi pengukuran ini dipakai untuk mendapatkan PBHP (Producing Bottom Hole Pressure) sedangkan pada sumur yang di shut in untuk mendapatkan SBHP (Static Bottom Hole Pressure).
Secara garis besar Informasi yang didapatkan dari pengujian Sonolog adalah :
1. Tekanan casing
2. Kecepatan suara (berdasarkan data rata-rata panjang Tubing) 3. Kedalaman fluida (fluid level)
4. BHP
Setelah mengetahui kedalaman cairan (fluid level) dari pengujian Sonolog, Tekanan Statik (Ps) dan Tekanan Laju Alir (Pwf) dapat dihitung dengan rumus sebagai berikut :
Ps = (D – SFL) (Gf) (2-3)
Pwf = (D – DFL) (0.433 SG(l)) (2-4)
Keterangan :
Ps = Tekanan Statis, psi
Pwf = Tekanan Alir Dasar Sumur, psi D = Kedalaman mid perforasi, ft SFL = Kedalaman Static Fluid Level, ft DFL = Kedalaman Dynamic Fluid Level, ft Gf = Gradient fluida
2.2. Produktivitas Formasi
Produktivitas formasi merupakan kemampuan formasi untuk mengalirkan fluida yang terkandung di dalam reservoir menuju sumur produksi pada tekanan tertentu yang dinyatakan dengan Produktivity Index (PI).
2.2.1. Productivity Index (PI)
Productivity Index (PI) merupakan suatu besaran yang menunjukan
kemampuan berproduksi dari suatu lapisan dalam suatu formasi, dimana secara defenisi merupakan perbandingan laju produksi (q) yang dihasilkan oleh suatu sumur atau reservoir pada suatu tekanan alir dasar sumur tertentu terhadap perbedaan tekanan dasar sumur pada keadaan static (Ps) dan tekan dasar sumur pada saat terjadi aliran (Pwf) atau sering disebut Pressure Drawdown (Ps-Pwf).
Secara matematis, PI dapat dinyatakan dalam hubungan sebagai berikut :
Drawdown Produksi Laju PI= atau Pwf -Ps q PI= (2-5)
Keterangan : PI = Productivity Index, Bbl/hari/Psi Q = Laju Produksi, Bbl/hari
Ps = Tekana Statik Reservoar, Psi Pwf = Tekanan Alir Dasar Sumur, Psi
Pengukuran Index Produktivitas tersebut didasarkan pada total produksi cairan atau gross liquid production, yaitu total produksi minyak dan air. Sedangkan produktivitas untuk suatu lapisan atau formasi produktif, sering dinyatakan dalam Specific Productivity Index (SPI), dimana secara matematis ditunjukkan dalam bentuk persamaan sebagai berikut :
Pwf) -h.(Ps q h PI SPI= = (2-6) Keterangan :
PI = Productivity Index, Bbl/Hari/Psi q = Laju produksi, Bbl/Hari
Ps = Tekanan static reservoar, Psi Pwf = Tekanan alir dasar sumur, Psi h = Ketebalan formasi produktif, ft
Pada umumnya, dilapangan digunakan klasifikasi yang sebaik mungkin terhadap PI. Berdasarkan pengalamannya, Kermit E. Brown (1967) telah mnecoba memberikan batasan terhadap tingkat produktivitas sumur sebagai berikut:
- PI rendah, jika harga PI lebih rendah dari 0,5
- PI sedang, jika harga PI terletak antara 0,5 sampai 1,5 - PI tinggi, jika harga PI lebih besar dari 1,5
Harga PI yang rendah pada permulaan produksi kemungkinan disebabkan oleh terjadinya kerusakan formasi (formation damage). Hal ini dapat diketahui dari hasil DST.
Harga q dalam suatu lapangan dapat didekati dengan persamaan untuk aliran radial adalah:
(
re/rw)
ln 0 0 Pwf) -(Ps h k x x 0.007082 q β µ = (2-7)Asumsi yang digunakan pada Persamaan (2-7) adalah : 1. Fluida berfasa satu dan incrompressible.
2. Aliran steady state (mantap), yaitu aliran dimana tekanan dan kecepatan aliran fluida pada setiap titik dari sistem tidak berubah terhadap waktu.
3. Fluida tidak bereaksi terhadap formasi 4. Formasi homogeny.
Apabila harga q di atas dimasukkan ke dalam Persamaan (2-5), maka diperoleh persamaan PI dalam bentuk lain, yaitu :
(
re/rw)
ln 0 0 h k x x 0.007082 PI β µ = (2-8)Keterangan :
q = Laju Produksi, Bpd
Ps = Tekanan Statik reservoir, Psi Pwf = Tekanan Alir Dasar Sumur, Psi k = Permeabilitas, mD
µ0 = Viskositas Minyak, cp
β0 = Faktor Volume Formasi, STB/BBL
rw = Jari-jari Sumur, ft
re = Jari-jari Pengurasan, ft
2.2.2. Inflow Performance Relationship (IPR)
Productivity Index (PI) dan Deliverability Index (DI) yang diperoleh dari
hasil test maupun dari perkiraan adalah merupakan gambaran secara kualitatif mengenai kemampuan suatu sumur untk berproduksi. Inflow performance
Relationship (IPR) berperan penting dalam merencanakan fasilitas produksi pada
suatu lapangan minyak maupun gas.
Dalam kaitannya dengan perencanaan suatu sumur ataupun untuk melihat kelakuan suatu sumur untuk berproduksi, maka IPR dapat didefenisikan sebagai PI yang dinyatakan secara grafis.
Berdasarkan defenisi PI yang secara matematis ditunjukan oleh Persamaan (2-5) pada suatu keadaan tertentu dari suatu sumur, dimana tekanan statis reservoir (Ps) dan PI dianggap konstan, maka variabelnya adalah laju produksi (q) dan tekanan alir dasar sumur (Pwf), sehingga persamaan PI dapat ditulis sebagai:
PI q Ps
Pwf = − (2-9)
Berdasarkan definisi PI, maka untuk membuat grafik IPR, perlu diketahui data tentang:
- Laju produksi (q)
- Tekanan alir dasar sumur (Pwf) - Tekanan static sumur (Ps)
Ketiga data tersebut diperoleh dari test produksi dan test tekanan yang dilakukan pada sumur yang bersangkutan. Berdasarka ketiga data tersebut, dibuat IPR sesuai dengan kondisi dari aliran fluidanya, apakah satu fasa,dua fasa, atau tiga fasa.
2.2.2.1. Inflow Performance Relationship (IPR) Tiga Fasa Pudjo Sukarno
Metode ini dikembangkan menggunakan simulator, yang juga digunakan untuk mengembangkan kurva IPR gas - minyak. Anggapan yang digunakan pada waktu pengembangan metode ini adalah :
1. Faktor Skin sama dengan nol
2. Gas, Minyak dan Air berada dalam satu lapisan dan mengalir bersama sama secara radial.
Untuk menyatakan kadar air dalam laju produksi total digunakan parameter Water Cut, yaitu perbandingan laju produksi air dengan laju produksi cairan total. Parameter ini merupakan parameter tambahan dalam persamaan kurva IPR yang dikembangkan. Selain itu, hasil simulasi menunjukkan bahwa pada suatu saat tertentu, yaitu pada harga tekanan reservoir tertentu, harga water cut berubah sesuai dengan perubahan tekanan alir dasar sumur. Dengan demikian perubahan water cut sebagai fungsi dari tekanan alir dasar sumur, perlu pula ditentukan.
Dalam pengembangan kinerja aliran tiga fasa dari formasi ke lubang sumur, telah digunakan tujuh kelompok data hipotesis reservoir, yang mana untuk masing-masing kelompok dilakukan perhiyungan kurva IPR untuk lima harga water cut yang berbeda, yaitu : 20%, 40%, 60%, 80%, serta 90%. Dari hasil perhitungan diperoleh 385 titik data, dan titik data ini dikelompokkan sesuai dengan harga water cut nya. Untuk masing-masing kelompok water cut dibuat kurva IPR tak berdimensi, yaitu plot antara q0/qt max terhadap Pwf/Pr (qt max)
adalah laju aliran cairan total maximum dan kemudian dilakukan analisa regresi. Hasil analisa regresi yang terbaik adalah sebagai berikut :
tmaks o q q = 2 2 1 + + s wf s wf o P P A P P A A (2-10)
An, (n= 0, 1 dan 2) adalah konstanta persamaan, yang harganya berbeda
untuk water cut yang berbeda. Hubungan antara konstanta tersebut dengan water cut ditentukan pula secara analisa regresi, dan diperoleh persamaan sebagai berikut :
An = Co + C1 (Water cut) + C2 (Water cut)2 (2-11)
Keterangan :
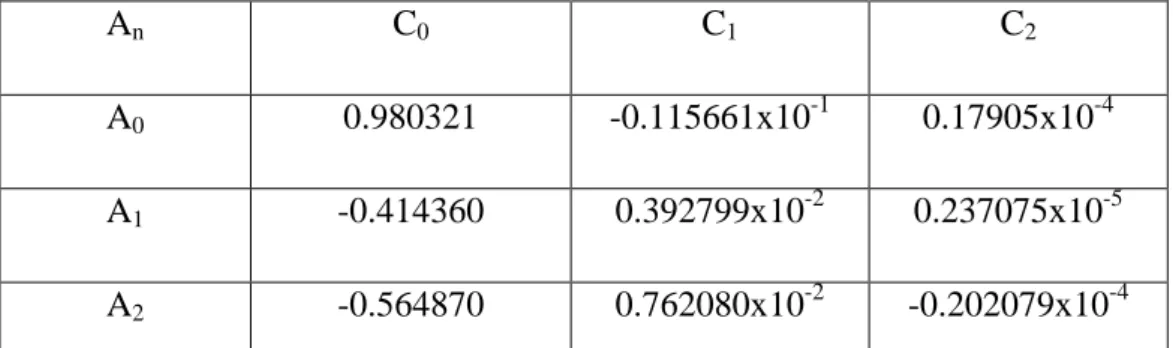
Cn (n = 0, 1 dan 2) untuk masing-masing harga An ditunjukan dalam Tabel II-1.
Tabel II-1
Konstanta Cn Untuk Masing-masing An 1)
An C0 C1 C2
A0 0.980321 -0.115661x10-1 0.17905x10-4
A1 -0.414360 0.392799x10-2 0.237075x10-5
A2 -0.564870 0.762080x10-2 -0.202079x10-4
Berdassarkan uraian sebelumnya bahwa harga water cut berubah sesuai dengan perubahan tekanan alir dasar sumur pada satu harga tekanan reservoir, maka perlu dibuat hubungan antara tekanan alir dasar sumur dengan water cut. Hubungan ini dinyatakan sebagai :
Pwf/Pr terhadap WC/(WC @ Pwf ~ Pr) ditentukan dari sumber simulator, untuk kelima harga water cut. Analisa regresi terdapat titik – titik data menghasilkan persamaan sebagai berikut :
) Pr Pwf (P2 Exp P1 Pr ~ Pwf @ WC WC = (2-12) WC = 100% qt qw x (2-13)
dimana :
P1 dan P2 tergantung dari harga water cutnya, dan dari analisa regresi diperoleh hubungan sebagai berikut :
P1 = 1.606207 – 0.130447 ln (water cut) (2-14)
P2 = -0.517792 + 0.110604 ln (water cut) (2-15)
Dimana : Water Cut dinyatakan dalam persen (%)
Prosedur perhitungan kinerja aliran tiga fasa dari formasi ke lubang sumur adalah sebagai berikut :
Langkah 1. Siapkan data penunjang yang meliputi :
- Tekanan reservoir/ tekanan statis Sumur (Ps) - Tekanan alir dasar sumur (Pwf)
- Laju produksi minyak dan air (qo & qw)
- Harga water cut berdasrakan uji produksi (dalam persen)
Langkah 2. Hitung WC @ Pwf ~Pr dengan menggunakan menggunakan Persamaan (2-12). Dimana Persamaan (2-12) tersebut dapat dituliskan sebagai : WC @ Pwf ≈ Pr = × Pr Pwf P2 Exp P1 cut water
Dimana harga water cut adalah harga dari uji produksi, sedangkan harga P1dan P2 dihitung dengna menggunakan Persamaan (2-14) dan Persamaan (2-15) .
Langkah 3. Berdasarkan harga WC @ Pwf ≈ Pr, hitung konstanta A0, A1 dan A2
dengan menggunakan Persamaan (2-11) dan Tabel II-1. Harga
konstanta ini tetap dan digunakan dalam perhitungan kurva IPR.
Langkah 4. Berdasarkan data uji produksi, tentukan laju produksi cairan total maksimum dengan menggunaakan Persamaan (2-10) dan konstanta A0, A1 dan A2 dari langkah 3, yaitu :
2 2 1 0 0 max t Pr Pwf A Pr Pwf A q + + = A q
Langkah 5.Berdasarkan haarga qt max daari langkah 4, dapat dihitung laju produksi minyak untuk berbagaai harga tekanan alir dasar sumur.
Langkah 6. Laju produksi air untuk setiap water cut pada tekanan alir dasar sumur, dengan :
(
)
0w WC / (100 - WC) q
q =
(2-16)
2.3. Pompa Sucker Rod
Dalam memproduksikan minyak dapat dilakukan dengan dua cara, yaitu dengan cara sembur alam (natural flow) dan sembur buatan (artificial lift). Cara pertama dilakukan bila tekanan reservoir cukup tinggi, sehingga dapat mengalirkan fluida ke permukaan secara alamiah. Cara yang kedua dilakukan apabila tekanan reservoir tidak mampu lagi mengalirkan fluida kepermukaan secara alamiah. Salah satu metode yang digunakan dalam menangani masalah yang kedua adalah dengan menggunakan Pompa Sucker Rod.
Pompa sucker rod atau pompa angguk adalah salah satu metode artificial lift yang paling baik diterapkan pada sumur-sumur dangkal dan sedikit atau tidak adanya gas yang terproduksi bersama minyak. Dalam pengoperasiannya, pompa sucker rod memiliki banyak masalah yang sering timbul, diantaranya adalah tidak sesuainya laju produksi yang diinginkan dengan laju produksi sebenarnya. Kondisi tersebut dapat disebabkan karena adanya kebocoran tubing, kebocoran
standing valve maupun travelling valve, adanya plunger overtravel maupun undertravel, fluid pound, gas lock, plunger sticking, gesekan yang berlebihan dan
lain sebagainya.
Dalam pendesainan pompa sucker rod, informasi mengenai static fluid level sangat penting untuk diketahui, terutama untuk mendesain setting depth pump. Untuk mengetahui static fluid level dapat menggunakan alat yang disebut sonolog,
pada prinsipnya sonolog menggunakan gelombang suara untuk mengetahui level cairan didalam sumur. Data-data yang diperoleh dari sonolog dapat digunakan untuk mengevaluasi kinerja pompa dan mengoptimasikan kinerja pompa supaya didapat laju produksi yang optimum.
Pompa Sucker Rod atau sering juga disebut beam pumping ialah salah satu metode artificial lift yang memanfaatkan gerakan naik- turun dari plunger untuk mendorong fluida reservoir ke permukaan. Dalam klasifikasinya, API menggunakan kode misalnya : C-160-173-64CW. Untuk huruf C pada jenis pompa mengandung arti jenis pompanya adalah unit Conventional, angka 160 adalah batasan torsi maksimum yang diijinkan pada pompa sebesar 160 Kinlbs, angka 173 adalah batasan beban polished rod maksimum yang diijinkan sebesar 173 ratusan pound (17.3 klb) dan angka 64 merupakan panjang langkah pompa maksimumnya 64 in, serta huruf CW merupakan arah putaran dari pompa searah jarum jam (circulation watch).
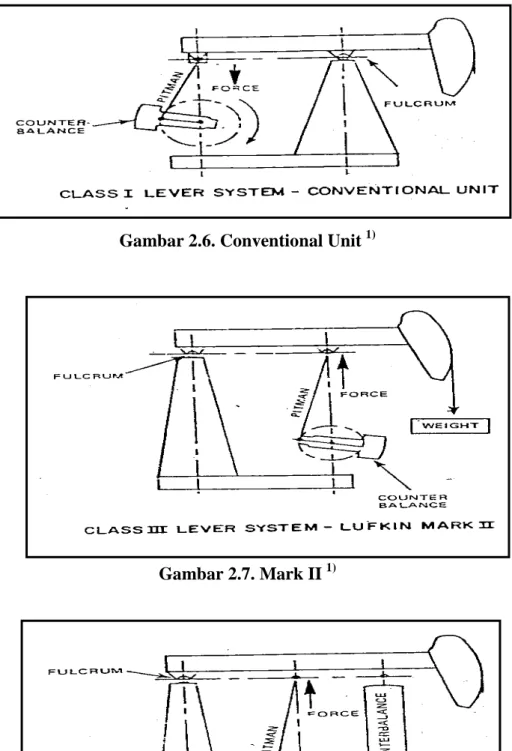
Pompa Sucker Rod ada tiga jenis yaitu Conventional Unit, Mark II dan Air
Balance. Conventional Unit adalah jenis pompa Sucker Rod yang paling banyak
digunakan dengan ukuran/tenaga sampai 100 HP, sedangkan Mark II digunakan untuk sumur yang dalam dengan produksi yang tinggi, dengan ukuran/tenaga sampai 125 HP. Air Balance unit adalah jenis dari pompa Sucker Rod yang memiliki ukuran lebih kecil dan ringan dibandingkan dengan unit lainnya, pompa Sucker Rod ini memiliki ukuran sampai 150 HP.
Gambar 2.6. Conventional Unit1)
Gambar 2.7. Mark II1)
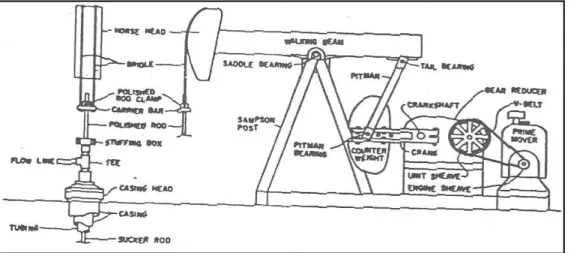
2.3.1. Peralatan Pompa Sucker Rod
Peralatan pompa Sucker Rod dibagi menjadi dua kelompok utama yaitu peralatan di atas permukaan dan peralatan di bawah permukaan.
A. Peralatan di Atas Permukaan
Peralatan di atas permukaan ini memindahkan energi dari suatu prime mover ke Sucker Rod. Selain itu peralatan ini juga mengubah gerak berputar dari prime mover menjadi suatu gerak naik turun dan juga mengubah kecepatan prime mover menjadi langkah pemompaan yang sesuai.
a. Prime mover
Merupakan penggerak utama, dimana prime mover akan memberikan gerakan putar yang diubah menjadi gerak naik turun pada Polish rod dan Sucker Rod untuk diteruskan ke peralatan bawah permukaan. Prime mover dapat berupa mesin gas, diesel, motor bakar dan listrik. Prime mover ini disesuaikan dengan tersedianya sumber tenaga tersebut. Jadi pemilihan motor diusahakan mempunyai daya yang cukup untuk mengangkat fluida dan rangkaian rod dengan kecepatan yang diinginkan.
b. V-Belt
Merupakan sabuk untuk memindahkan gerak dari Prime mover ke Gear reducer.
c. Gear Reducer
Berfungsi mengubah kecepatan putar dari Prime mover menjadi langkah pemompaan yang sesuai. Gear reducer juga merupakan transmisi yang berfungsi untuk mengubah kecepatan putar dari Prime mover, gerak putaran Prime mover diteruskan ke Gear reducer dengan menggunakan belt. Belt ini dipasang menghubungkan sheave di Prime mover dan unit sheave pada Gear reducer.
d. Crank Shaft
Merupakan poros Crank yang berfungsi untuk mengikat Crank pada Gear reducer.
e. Crank
Merupakan sepasang tangkai yang menghubungkan Crank shaft pada Gear reducer dengan pitman. Pada Crank ini terdapat lubang-lubang tempat Pitman bearing. Besar kecilnya langkah atau stroke pemompaan yang diinginkan dapat diatur disini, dengan cara menghubungkan Pitman dengan lubang yang sesuai dengan panjang langkah yang diinginkan.
Apabila Pitman terpasang pada lubang yang paling luar, maka panjang langkahnya adalah yang paling panjang untuk pompa tersebut, sedangkan bila Pitman terpasang pada lubang paling dalam yang berarti langkahnya paling pendek.
f. Counterbalance
Adalah sepasang pemberat yang fungsinya :
- Menyimpan tenaga prime mover pada saat Down-stroke atau pada saat counterbalance menuju ke atas, yaitu pada saat kebutuhan tenaga kecil atau minimum
- Membantu tenaga Prime mover pada saat Up-stroke (saat counterbalance bergerak ke bawah) sebesar tenaga potensialnya, karena kerja prime mover yang terbesar adalah pada saat Up-stroke (pompa bergerak ke atas) dimana sejumlah minyak ikut terangkat ke atas permukaan.
g. Pitman
Adalah penghubung antara Walking beam pada equalizer bearing dengan Crank. Lengan pitman merubah gerakan berputar menjadi gerakan naik turun.
h. Walking Beam
Merupakan balok melintang diatas menara (Sampson post) dengan mempunyai engsel ditengahnya. Pada ujung Walking beam terdapat kepala kuda (Horse head) dan pada ujung yang lainnya, dihubungkan dengan Pitman yang fungsinya meneruskan gerakan Pitman sehingga horse head bergerak naik turun.
i.Horse head.
Meneruskan gerak dari Walking beam ke unit pompa di dalam sumur melalui bridle, Polish rod dan Sucker string atau merupakan kepala dari Walking beam yang menyerupai kepala kuda.
j. Bridle
Merupakan nama lain dari wire line hanger, yaitu merupakan sepasang kabel baja yang disatukan pada Carrier bar. Bridle diikat di horse head sedangkan ujung yang lain ditempati Carier bar.
k. Carrier bar
Merupakan alat yang berfungsi sebagai tempat bergantungnya rangkaian rod dan polished rod, penyangga dari polished rod clamp.
l. Polished rod clamp
Komponen yang bertumpu pada Carrier bar yang fungsinya untuk mengikat Polished rod pada Carrier bar.
m. Polished rod
Polished rod merupakan bagian teratas dari rangkaian rod yang muncul di permukaan. Fungsinya adalah menghubungkan antara rangkaian rod di dalam sumur dengan peralatan-peralatan di permukaan. Polished rod mempunyai permukaan yang licin sehingga batang besi tersebut dinamakan Polished rod.
n. Stuffing box
Dipasang di atas kepala sumur (Casing atau Tubing head) untuk mencegah/menahan minyak agar supaya tidak keluar bersama naik turunnya Polish rod. Dengan demikian seluruh aliran minyak hasil pemompaan akan mengalir ke Flowline lewat Crosstee.
o. Sampson post
p. Saddle bearing
Adalah tempat kedudukan (engsel) dari Walking beam pada Sampson post pada bagian atas.
q. Brake
Brake disini berfungsi untuk mengerem gerak pompa jika dibutuhkan, misalnya pada saat akan dilakukan reparasi sumur atau unit pompanya sendiri.
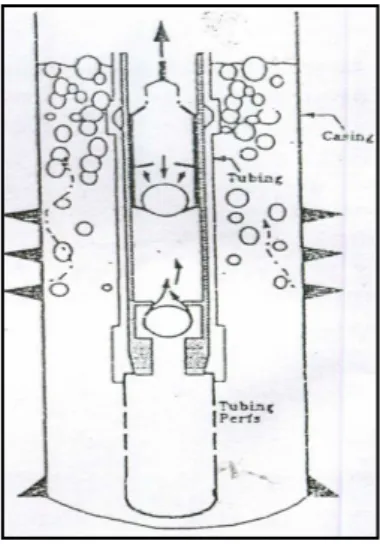
B. Peralatan di Bawah Permukaan
Gambar 2.9
Peralatan di bawah permukaan 1)
Peralatan pompa di bawah permukaan (subsurface pump equipment) terdiri dari beberapa komponen utama, yaitu :
a. Working Barrel
Merupakan tempat dimana plunger dapat bergerak naik turun sesuai dengan langkah pemompaan dan menampung minyak terisap saat Upstroke.
b. Plunger
Merupakan bagian dari pompa yang terdapat didalam barrel dan dapat bergerak naik turun yang berfungsi sebagai penghisap minyak dari lubang sumur masuk ke Barrel yang kemudian diangkat ke permukaan melalui Tubing.
c. Tubing
Seperti halnya pada peralatan sembur alam, Tubing digunakan untuk mengalirkan minyak dari dasar sumur ke permukaan setelah minyak diangkat oleh Plunger pada saat Upstroke.
d. Standing Valve
Merupakan bola yang terdapat dibagian paling bawah barrel pompa yang berfungsi mengalirkan fluida dari lubang sumur masuk ke Working barrel dan hal ini terjadi pada saat Plunger bergerak ke atas dan selanjutnya Standing valve membuka.
e. Travelling Valve
Merupakan bola yang ikut bergerak naik turun menurut gerakan Plunger dan berfungsi mengalirkan minyak dari Working barrel masuk ke Plunger dan hal ini terjadi pada saat Plunger bergerak ke bawah serta menahan minyak keluar dari Plunger pada saat Plunger bergerak ke atas.
f. Gas Anchor
Merupakan komponen pompa yang dipasang dibagian bawah dari pompa yang berfungsi untuk memisahkan gas dari minyak agar gas tersebut tidak ikut masuk ke dalam pompa bersama-sama dengan minyak.
Ada dua macam tipe Gas Anchor, yaitu : - Poorman type
Larutan gas dalam minyak yang masuk ke dalam anchor akan melepaskan diri dari larutan (bouyancy effect). Minyak akan masuk ke dalam barel melalui suction pipe, sedangkan gas yang telah terpisah akan dialihkan melalui annulus. Apabila suction pipe terlalu panjang atau diameternya terlalu kecil, maka akan terjadi pressure loss yang cukup besar sehingga menyebabkan terjadinya penurunan PI (Produktivity Index) sumur pompa. Sedangkan apabila
suction pipe terlalu besar akan menyebabkan annulus antara dinding anchor dengan suction pipe menjadi lebih kecil, sehingga kecepatan aliran minyak besar dan akibatnya gas masih terbawa oleh butiran-butiran minyak. Diameter gas anchor yang terlalu besar akan menyebabkan penurunan PI sumur pompa.
Gambar 2.10. Poorman Type Gas Anchor 11)
- Packer type
Minyak masuk melalui ruang antara dinding anchor dan suction pipe, kemudian minyak jatuh di dalam annulus antara Casing dan gas anchor dan ditahan oleh Packer, selanjutnya minyak masuk ke pompa melalui suction pipe. Disini minyak yang masuk ke dalam annulus sudah terpisah dari pompa.
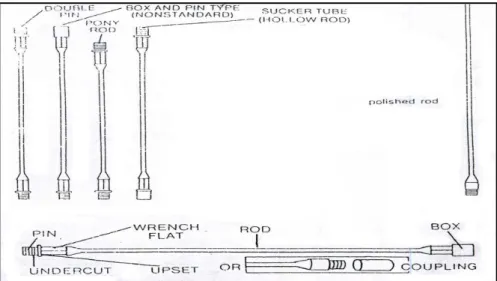
g.Tangkai Pompa
Tangkai pompa (Sucker Rod string) terdiri dari : -Sucker rod
-Pony rod -Polished rod
Gambar 2.12. Sucker Rod String 11)
- Sucker rod
Merupakan batang penghubung antara Plunger dengan peralatan di permukaan. Fungsi utamanya adalah melanjutkan gerak naik turun dari horse head ke Plunger. Berdasarkan konstruksinya, maka Sucker Rod dibagi menjadi 2 (dua) a. berujung box-pin
b. berujung pin-pin
Untuk menghubungkan antara dua buah Sucker Rod digunakan Sucker Rod coupling. Umumnya panjang satu single dari Sucker Rod yang sering digunakan berkisar antara 20-30 ft. Terdapat beberapa macam ukuran Sucker Rod, dimana ukuran-ukuran tersebut merupakan standar API.
Dalam perencanaan Sucker Rod selalu diusahakan atau yang dipilih yang ringan, artinya memenuhi kriteria ekonomis, tetapi dengan syarat tanpa mengabaikan stress yang diperbolehkan (allowable stress) pada Sucker Rod tersebut. Sucker Rod yang dipilih dari permukaan, sampai unit pompa di dasar sumur (Plunger) tidak perlu sama diameternya, tetapi dapat dilakukan/dibuat
kombinasi dari beberapa type dan ukuran Rod. Sucker string yang merupakan kombinasi dari beberapa type dan ukuran tersebut, disebut Tappered Rod String. - Poni rod
Merupakan rod yang lebih pendek dari panjang Rod umumnya (25 feet). Fungsinya adalah untuk melengkapi panjang dari Sucker Rod, apabila tidak mencapai kepanjangan yang dibutuhkan ukurannya adalah : 2, 4, 6, 8, 12 feet. - Polished rod
Adalah tangkai Rod yang berada di luar sumur yang mengubungkan Sucker rod string dengan Carier bar dan dapat naik turun di dalam Stuffing box. Diameter Stuffing box lebih besar daripada diameter Sucker Rod, yaitu : 1 1/8, 1 ¼, 1 ½, 1 ¾. Panjang Polished rod adalah :8,11,16, 22 feet.
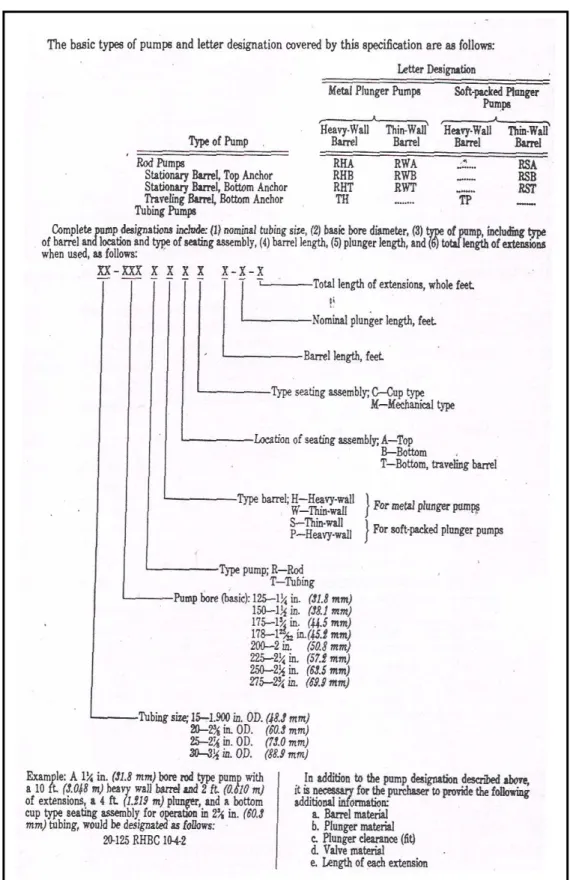
Gambar 2.13
Klasifikasi Pompa menurut API 1)
Gambar 2.13 diatas merupakan jenis-jenis pompa berdasarkan klasifikasi
API (American Petroleum Institut), gambar no.1 sampai no.7 pada Gambar 2.13 diatas merupakan pompa jenis Rod, sedangkan no.7 dan no.8 merupakan pompa jenis Tubing. Berikut adalah keterangan untuk jenis-jenis pompa berdasarkan klasifikasi API :
1. RHA : Rod, Stationary Heavy Wall Barrel, Top Anchor Pump RLA : Rod, Liner Barrel, Top Anchor Pump
2. RWA : Rod, Stationary Thin Wall Barrel, Top Anchor Pump
RSA : Rod, Stationary Thin Wall Barrel, Top Anchor Pump, Soft Packed 3. RHB : Rod, Stationary Heavy Wall Barrel, Bottom Anchor Pump
RLB : Rod, Liner Barrel, Bottom Anchor Pump
4. RWB : Rod, Stationary Thin Wall Barrel, Bottom Anchor Pump
RSB : Rod, Stationary Thin Wall Barrel, Bottom Anchor Pump, Soft Packed 5. RHT : Rod, Travelling Heavy Wall Barrel, Bottom Anchor Pump
RLT : Rod, Travelling Liner Barrel, Bottom Anchor Pump 6. RWT : Rod, Travelling Thin Wall Barrel, Bottom Anchor Pump
RST : Rod, Travelling Thin Wall Barrel, Bottom Anchor Pump, Soft Packed 7. TH : Tubing, Heavy Wall Barrel Pump
TL : Tubing, Liner Barrel Pump
8. TP : Tubing, Heavy Wall Barrel Soft Packed
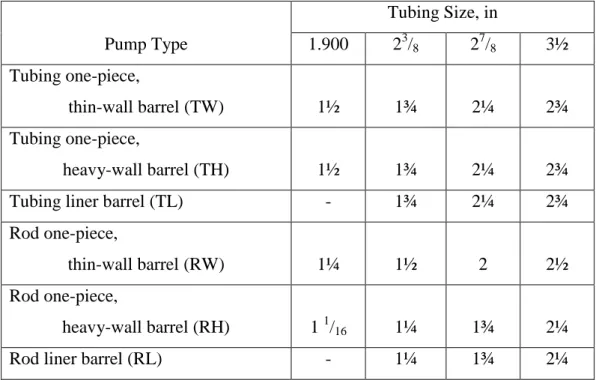
Tabel II-2
Jenis dan Ukuran Maksimum Pompa 1)
Pump Type Tubing Size, in 1.900 23/8 27/8 3½ Tubing one-piece, thin-wall barrel (TW) 1½ 1¾ 2¼ 2¾ Tubing one-piece, heavy-wall barrel (TH) 1½ 1¾ 2¼ 2¾
Tubing liner barrel (TL) - 1¾ 2¼ 2¾
Rod one-piece,
thin-wall barrel (RW) 1¼ 1½ 2 2½
Rod one-piece,
heavy-wall barrel (RH) 1 1/16 1¼ 1¾ 2¼
Tabel II-3
2.3.2. Prinsip Kerja Pompa Sucker Rod
Prinsip kerja pompa Sucker Rod secara sederhana dapat dijelaskan sebagai berikut, pada saat Downstroke sampai travelling valve mendekat standing valve maka tekanan ruang diantara standing valve dan travelling valve akan lebih besar dibanding tekanan diatas travelling valve dan di bawah standing valve, sehingga bola pada standing valve akan terdorong kebawah sehingga valve menutup dan mendorong bola pada travelling valve keatas, sehingga valve terbuka, dengan demikian fluida akan mengalir kedalam plunger. Pada saat Upstroke, sampai travelling valve menjauh dari standing valve, maka tekanan ruang antara standing
valve dan travelling valve akan lebih kecil dibandingkan tekanan formasi dan
tekanan diatas travelling valve, sehingga standing valve terbuka (bola standing valve terdorong keatas) yang kemudian barel diisi fluida formasi, sedangkan pada
travelling valve-nya tertutup karena tekanan diatas travelling valve lebih besar
dibandingkan dengan tekanan di bawah travelling valve. Demikianlah seterusnya secara kontinyu, sehingga fluida terdorong ke permukaan dengan bantuan gerakan naik turun dari pompa Sucker Rod.
Gambar 2.14
2.3.3. Analisa Peralatan Pompa
Komponen-komponen peralatan pompa Sucker Rod merupakan suatu gabungan yang komplek, dengan kata lain akan saling tergantung satu dengan yang lain.
2.3.3.1 Analisa Gerakan Rod
Apabila Sucker Rod digantung pada Polished rod atau bergerak naik turun pada kecepatan konstan, maka gaya yang bekerja pada Polished rod adalah berat dari sucker rod, dalam hal ini sucker rod mengalami percepatan. Polished rod akan menderita beban tambahan yaitu beban percepatan.
a g Wr
...(2-17)
Faktor percepatan atau faktor dimana bobot mati dari rod harus dikalikan dengan faktor kecepatan ini untuk mendapatkan beban percepatan yang maksimal, dinyatakan sebagai : g a =
α
...(2-18) Keterangan :a = Percepatan maksimum yang terdapat pada sucker rod string, ft²/sec g = Percepatan gravitasi, ft²/sec
Suatu studi terhadap gerakan yang ditransmisikan dari Prime mover ke Sucker Rod menunjukkan bahwa gerakan Sucker Rod hampir merupakan gerak beraturan yang sederhana. Gerak beraturan ini dapat dinyatakan sebagai proyeksi suatu partikel yang bergerak melingkar pada garis tengah lingkaran tersebut.
Apabila hal tersebut diatas dihubungkan dengan sistem Sucker Rod, maka : 1. Diameter lingkaran menyatakan panjang langkah Polished rod.
2. Waktu untuk satu kali putaran dari partikel yang melingkar sama dengan waktu untuk satu kali siklus pemompaan.
Percepatan maksimum dari pada sistem Sucker Rod terjadi pada awal Up stroke dan awal Down stroke, yaitu pada saat titik proyeksi mempunyai jarak yang jauh dari pusat gerak melingkar.
Pada saat tersebut percepatan dari pada proyeksi sama dengan percepatan gerak melingkar, yaitu : a = e p r V 2 ...(2-19) Keterangan :
Vp = Kecepatan partikel, ft/sec
re = Jari-jari lingkaran, ft
Apabila waktu untuk satu kali putaran, maka :
Vp =
τ
π
re2
...(2-20)
Apabila N = jumlah putaran persatuan waktu :
Vp = 2π re N...(2-21)
Dimana N = 1/α, jika Persamaan (2-20) dan Persamaan (2-21) disubstitusikan pada Persamaan (2-18) didapat :
g N r g r V e e p 2 2 2 4
π
= ...(2-22) Untuk sumur pompa :N = Kecepatan pemompaan, SPM g = Percepatan gravitasi, ft²/sec
re = Dapat dihubungkan dengan polished rod, stroke length yaitu :
re =
2
Dengan demikian Persamaan (2-22) menjadi : α = g SN 2 2
π
...(2-23)Panjang langkah Polished rod biasanya dinyatakan dalam inchi, dan kecepatan pemompaan dalam stroke per menit (SPM), maka :
α = 2 2 2 2 sec 3600 min 1 12 1 sec / min / 2 , 32 2 in ft ft in SN
π
α = 70500 2 SN ...(2-24)2.3.3.2. Sucker Rod String
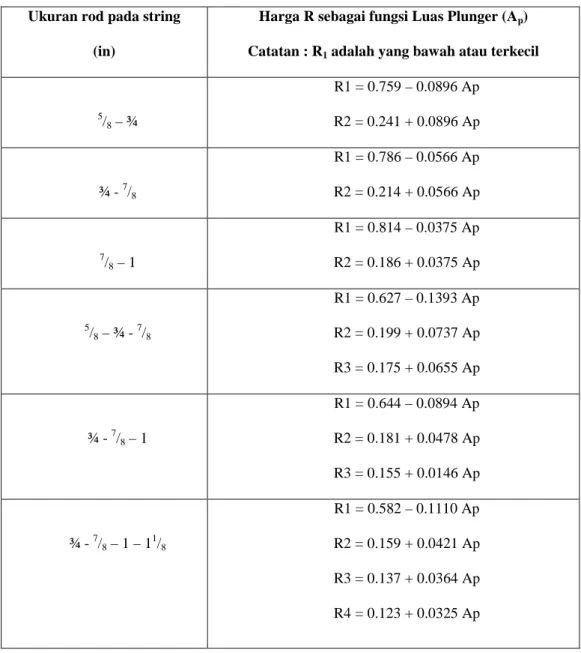
Sucker Rod string didapati pada sumur-sumur yang dalam, dan tidak hanya terdiri dari satu macam diameter, merupakan Tapered rod (makin ke atas makin besar diameternya, karena membawa beban yang lebih berat). Dengan anggapan bahwa stress disetiap bagian sama (pada puncak masing-masing interval). Pada Tabel (II-4), R1, R2, R3, dan seterusnya adalah fraksi panjang dari
seluruh panjang rod, dan karena umumnya suatu potongan rod mempunyai panjang 25 ft, maka pembulatan selalu 25 ft.
2.3.3.3. Effective Plunger Stroke (Sp)
Jumlah volume minyak yang diperoleh selama pemompaan tidak tergantung pada panjang Polished rod, tetapi tergantung pada gerakan relatif
plunger terhadap Working barrel yang disebut effective plunger stroke.
Pada dasarnya langkah ini berbeda dengan Polished rod stroke. Perbedaan ini disebabkan oleh :
1. Adanya rod stretch dan tubing stretch.
2. Adanya plunger over travel yang disebabkan adanya percepatan.
Dengan demikian perlu diperkirakan adanya rod stretch dan tubing stretch serta over travel, yang mana hal ini telah dikembangkan oleh Marsh dan Coberly.
Tabel II-4
Kombinasi Untuk Sucker Rod 2)
Ukuran rod pada string (in)
Harga R sebagai fungsi Luas Plunger (Ap)
Catatan : R1 adalah yang bawah atau terkecil
5 /8 – ¾ R1 = 0.759 – 0.0896 Ap R2 = 0.241 + 0.0896 Ap ¾ - 7/8 R1 = 0.786 – 0.0566 Ap R2 = 0.214 + 0.0566 Ap 7 /8 – 1 R1 = 0.814 – 0.0375 Ap R2 = 0.186 + 0.0375 Ap 5/ 8 – ¾ - 7/8 R1 = 0.627 – 0.1393 Ap R2 = 0.199 + 0.0737 Ap R3 = 0.175 + 0.0655 Ap ¾ - 7/8 – 1 R1 = 0.644 – 0.0894 Ap R2 = 0.181 + 0.0478 Ap R3 = 0.155 + 0.0146 Ap ¾ - 7/8 – 1 – 11/8 R1 = 0.582 – 0.1110 Ap R2 = 0.159 + 0.0421 Ap R3 = 0.137 + 0.0364 Ap R4 = 0.123 + 0.0325 Ap
Pada saat Downstroke, Standing valve tertutup dan Travelling valve terbuka, beban fluida bekerja pada Tubing yang menyebabkan elongasi pada Tubing tersebut.
Pada awal Up stroke, Travelling valve tertutup, menimbulkan perpanjangan pada rod dan pembukaan pada Standing valve menyebabkan Tubing mengalami stretch. Kembalinya Tubing ke panjang semula menyebabkan Working barrel bergerak lebih ke atas.
Perpanjangan rod menyebabkan plunger bergerak lebih ke bawah. Dengan demikian effective plunger stroke berkurang sebesar jumlah perpanjangan rod dan tubing yang disebabkan oleh beban fluida.
Untuk suatu deformasi elastik, terdapat perbandingan antara stress yang bekerja pada suatu benda dengan strain yang dihasilkan oleh stress tersebut yang besarnya konstan, yaitu :
E =
Strain Stress
...(2-25)
Keterangan :
E = Modulus elastisitas, tergantung pada beban yang dipergunakan Sedangkan Stress merupakan gaya persatuan luas, maka :
Stress = F/ A...(2-26) Keterangan :
F = Gaya, lb
A = Luas penampang, in²
Dan strain adalah fraksi perubahan panjang, yaitu :
Strain = e /L... .(2-27) Gaya (F) dinyatakan dalam Lb, penampang (A) dinyatakan dalam in2. perpanjangan (e) dan panjang mula-mula (L) dinyatakan dalam satuan sama. Umumnya besarnya perpanjangan dalam in. Sedangkan panjang dalam ft, dengan demikian persamaan (2-27) berubah menjadi :
Strain =
L e
12 ...(2-28) Apabila persamaan (2-26) disubstitusikan kedalam Persamaan (2-25) menjadi :
E = eA FL L e A F 12 12 / / = ...(2-29) e = EA FL 12 ...(2-30)
Gaya yang disebabkan oleh beban fluida yang disebabkan adanya perbedaan tekanan sepanjang Plunger, dan bekerja pada luas permukaan Ap,
adalah:
F = ∆P x Ap...(2-31)
Apabila dianggap bahwa pompa dipasang pada working fluid level, perbedaan tekanan (∆P) pada plunger adalah tekanan kolom fluida dengan specific gravity campuran Gmix, sepanjang L (kedalaman pompa).
∆P = 0.433 Gmix L...(2-32)
Untuk suatu hal yang umum, dimana working fluid level terletak pada kedalaman D, tekanan C (dibawah plunger) yang disebabkan oleh kolom fluida didalam casing setinggi (L –D) harus diperhitungkan.
Gambar 2.16
Hubungan Kolom Fluida Di annulus dengan Tekanan 8)
Dengan demikian :
∆ = 0.433 G L – 0.433 Gmix (L –D)...(2-33)
∆ = 0.433 Gmix D
Dari Persamaan 2-30 : e = EA FL 12 = EA L DA G x0.433 mix P 12 = EA GDAL 520 ...(2-35)
Persamaan (2-35) diatas merupakan persamaan umum. Persamaan tersebut dapat untuk menghitung perpanjangan dari suatu benda yang mengalami pembebanan.
Berdasarkan persamaan (2-35), maka : 1. Perpanjangan tubing (et) adalah :
e1 = 5.20 Gmix D Ap L / E At...(2-36)
2. Perpanjangan rod string (er) adalah :
er = 5.20 Gmix D Ap L / E Ar...(2-37)
Keterangan :
Et = Perpanjangan tubing, in Er = Perpanjangan rod, in
Gmix= Specific gravity fluida campuran
D = Working fluid level, ft L = Kedalaman letak pompa, ft Ap = Luas penampang plunger, sq-in
At = Luas penampang tubing, sq-in
Ar = Luas penampang rod, sq-in
E = Modulus elastisitas = 30 x 106
Bila dipasang Anchor pada Tubing, maka bentuk L/At, dapat diabaikan.
Besarnya Ar, At, Ap dari masing-masing ukuran Rod, Tubing atau Plunger
Tabel II-5 Data Sucker Rod 1) Rod Size (in) Metal Area (in2) Rod Weight in Air (lb/ft) Elastic Constant (in/lb ft) ½ 0.196 0.72 1.990 x 10-6 5 /8 0.307 1.13 1.270 x 10-6 ¾ 0.442 1.63 0.883 x 10-6 7 /8 0.601 2.22 0.649 x 10-6 1 0.785 2.90 0.497 x 10-6 1 1/8 0.994 3.67 0.390 x 10-6 Tabel II-6 Data Tubing 1) Tubing Size (in) Outside Diameter (in) Inside Diameter (in) Metal Area (sq-in) 1.900 1.900 1.610 0.800 23/8 2.375 1.995 1.304 27/8 2.875 2.441 1.812 3½ 3.500 2.992 2.590 4 4.000 3.476 3.077 4½ 4.500 3.958 3.601
Tabel II-7 Data Plunger Pompa 1) Plunger Diameter in Area of Plunger (Ap) sq-in Constant (K) 1 1 1/16 1 ¼ 1 ½ 1 ¾ 1 25/32 2 2 ¼ 2 ½ 2 ¾ 3 ¾ 4 ¾ 0.785 0.886 1.227 1.767 2.405 2.448 3.142 3.976 4.909 5.940 11.045 17.721 0.117 0.132 0.182 0.262 0.357 0.370 0.466 0.590 0.728 0.881 1.640 2.630
Tabel II-8 Data Rod dan Pompa 1)
Rod* no. Plunmger diameter in Rod weight lb/ft Elastic constant in/lb ft Frequency
Factor Rod string, % of each size 11 /8 1 7/8 ¾ 5/8 ½ 44 All 0.726 1.990 x 10-6 1.000 ― ― ― ― ― 100.0 54 1.06 0.908 1.668 x 10-6 1.138 ― ― ― ― 44.6 55.4 54 1.25 0.929 1.663 x 10-6 1.140 ― ― ― ― 49.5 50.5 54 1.50 0.957 1.584 x 10-6 1.137 ― ― ― ― 56.4 43.6 54 1.75 0.990 1.525 x 10-6 1.122 ― ― ― ― 64.6 35.4 54 2.00 1.027 1.460 x 10-6 1.095 ― ― ― ― 73.7 26.3 54 2.25 1.067 1.391 x 10-6 1.061 ― ― ― ― 83.4 16.6 54 2.50 1.208 1.318 x 10-6 1.023 ― ― ― ― 93.5 6.5 55 All 1.135 1.270 x 10-6 1.000 ― ― ― ― 100.0 ― 64 1.06 1.164 1.382 x 10-6 1.229 ― ― ― 33.3 33.1 33.5 64 1.25 1.211 1.319 x 10-6 1.215 ― ― ― 37.2 35.9 26.9 64 1.50 1.275 1.232 x 10-6 1.184 ― ― ― 42.3 40.4 17.3 64 1.75 1.341 1.141 x 10-6 1.145 ― ― ― 47.4 45.2 7.4 65 1.06 1.307 1.138 x 10-6 1.098 ― ― ― 34.4 65.6 ― 65 1.25 1.321 1.127 x 10-6 1.104 ― ― ― 37.3 62.7 ― 65 1.50 1.343 1.110 x 10-6 1.110 ― ― ― 41.8 58.2 ― 65 1.75 1.369 1.090 x 10-6 1.114 ― ― ― 46.9 53.1 ― 65 2.00 1.394 1.070 x 10-6 1.114 ― ― ― 52.0 48.0 ― 65 2.25 1.426 1.045 x 10-6 1.110 ― ― ― 58.4 41.6 ― 65 2.50 1.460 1.018 x 10-6 1.099 ― ― ― 65.2 34.8 ― 65 2.75 1.497 0.990 x 10-6 1.082 ― ― ― 72.5 27.5 ― 65 3.25 1.574 0.930 x 10-6 1.037 ― ― ― 88.1 11.9 ― 66 All 1.634 0.883 x 10-6 1.000 ― ― ― 100.0 ― ―
Untuk Tappered rod string, perpanjangan rod dicari untuk masing-masing bagian, yaitu :
e1 = 5.20 G D Ap L1 / E A1 ……….(2-38)
e2 = 5.20 G D Ap L2 / E A2 ...dst
Keterangan :
e1 = Perpanjangan rod bagian pertama dengan panjang L1
e2 = Perpanjangan rod bagian kedua dengan panjang L2
Dari gabungan persamaan diatas, perpanjangan rod total adalah :
er = + + ... 20 . 5 2 2 1 1 A L A L E GDAP ...(2-39)
Rod mengalami perpanjangan akibat berat rod itu sendiri dan beban percepatan. Untuk Tappered rod, beban Rod bervariasi secara uniform dari harga nol (yaitu dari bagian bawah rod) sampai sebesar Wr (yaitu puncak dari rod).
Rata-rata berat dari rod yang menyebabkan perpanjangan adalah Wr/2, apabila
dipusatkan pada L/2.
Perpanjangan rod yang mengakibatkan berat rod dan beban percepatan, tidak sama besarnya pada waktu Upstroke ataupun Downstroke.
Pada akhir Downstroke, perpanjangan rod, adalah :
ed = r EA L Wr Wr ) /2 ( 12 + α ...(2-40)
Dan perpanjangan pada waktu Upstroke, adalah :
eu = r r r EA L W W ) /2 ( 12 − α ...(2-41)
Dari Persamaan (2-40) dan Persamaan (2-41) dapat ditentukan perpanjangan yang disebabkan oleh beban percepatan, yaitu :
ep = ed – eu = r r EA L W
α
12 ...(2-42)Sedang berat rod string, adalah : Wr = 144 r rLA
ρ
...(2-43) Keterangan : α = Faktor percepatanρr = Density rod, lb/cuft ≈ 490 lb/cuft untuk baja
Maka : ep = E L LA EA L t r
α
α
2 8 . 40 144 490 12 = ...(2-44) Keterangan :E = Modulus young besi = 30 x 106 Psi
Persamaan (2-44) digunakan untuk untappered rod string, sedangkan untuk
tappered rod string dilakukan pendekatan dengan persamaan berikut ;
ep = (46.5 L2α) / E...(2-45) Keterangan : Ep = Plunger overtravel, in L = Panjang rod, ft α = Faktor percepatan = S N2 /70500 S = Panjang langkah, in N = langkah/menit, SPM
Persamaan (2-45) akan memberikan perbedaan sekitar 25% tetapi hal ini tidak berpengaruh banyak dalam effective plunger stroke.
Dengan demikian effective plunger stroke adalah panjang langkah (polished rod stroke) dikurangi dengan perpanjangan rod ditambah dengan (rod &
tubing stretch) sebagai akibat beban fluida ditambah dengan plunger overtravel,
maka :
Penggabungan Persamaan (2-37), Persamaan (2-39), Persamaan (2-44) dan Persamaan (2-46) didapatkan Persamaan sebagai berikut :
Sp = S + + + −5.20 ... 8 . 40 2 2 1 1 2 A L A L E GDA E L
α
P ...(2-47)Dalam hal ini untappered rod string, Persamaan 2-46 menjadi :
Sp = S + + − r t P A A E GDA E L 5.20 1 1 8 . 40 2
α
...(2-48) Keterangan :L1, L2, L3, ...adalah panjang-panjang rod (bila diameternya berbeda-beda untuk sistem tersebut), ft
A1, A2, A3,...adalah luas penampang masing-masing bagian rod yang berbeda-beda untuk, inch2
Catatan: Apabila tubing dipasang anchor, maka At dapat diabaikan dan
Persamaan (2-47) & Persamaan (2-48) tidak mengandung At.
2.3.3.4. Kecepatan Pompa
Akibat pemompaan akan timbul getaran yang dialami oleh Rod string. Getaran yang dialami Rod tersebut adalah merupakan resultan dari getaran aslinya (transmitted wave) dengan getaran yang dipantulkan (reflected wave). Gambaran mengenai terjadinya getaran dari pada rod string adalah seperti pada Gambar
(2.17).
Apabila transmitted wave dan reflected wave terjadi serempak (syncronous), maka akibatnya akan terjadi resultan getaran yang maksimum (saling menguatkan). Akan tetapi bila antara kedua macam tidak terjadinya saling bergantian (non-syncronous), maka resultannya merupakan getaran yang saling melemahkan.
Maka dapatlah dimengerti bahwa kecepatan pemompaan setiap menit harus tidak boleh menimbulkan getaran yang maksimum, karena hal tersebut dapat membahayakan rod string (menyebabkan putus). Sehingga dibuat supaya getaran yang terjadi adalah getaran yang saling melemahkan.
Secara teoritis, dengan ketentuan kecepatan getaran pada baja sama dengan 15800 fps, maka akan terjadi getaran non-syncronous, jika :
N = 237.000 / n L...(2-49) Keterangan :
N = Kecepatan pemompaan, SPM L = Panjang sucker rod string, ft n = Bilangan tidak bulat
Jadi menentukan N dari pemompaan harus dipilih supaya harga n tidak bulat. Dihindarkan harga n = 1, 2, 3, ...dst, karena harga n bulat akan terjadi getaran yang syncronous.
Gambar 2.17
Getaran yang Terjadi Pada Rod String 2) 2.3.3.5. Perhitungan Counterbalance
Fungsi utama Counterbalance adalah menyimpan tenaga pada waktu Up
stroke dan waktu downstroke serta melepaskan tenaga pada waktu Upstroke.
Secara teoritis Counterbalance effect ideal (Ci) harus sedemikian rupa sehimgga Prime mover akan membawa beban rata-rata yang sama besarnya baik pada waktu Upstroke ataupun pada waktu Downstroke (Craft-holden, 1962 & Brown Kermit, 1984), yang dinyatakan sebesar :
Counterbalance yang ideal adalah :
Ci = 0,5 (Wmax + Wmin)...(2-51)
Dengan menggunakan parameter Wmax dan Wmin yang didapat dari hasil perhitungan polished rod load, maka akan diperoleh cunterbalance effect ideal sebesar :
Ci = 0.5 Wf +Wr ( 1- 0.127 G)...(2-52)
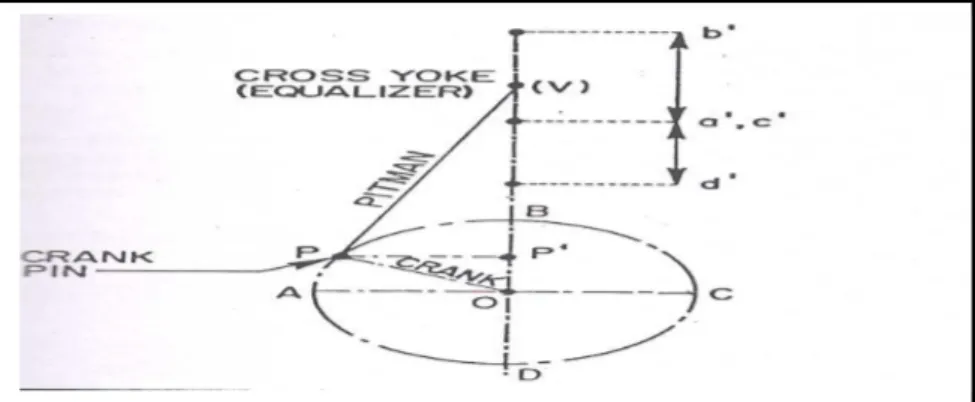
2.3.3.6. Perhitungan Torsi (Puntiran)
Perhitungan Torsi sangat erat hubungannya dengan perencanan
counterbalance, karena pumping unit harus bekerja tidak boleh melebihi puntiran
yang diijinkan pada Gear reducer yang telah ditentukan oleh pabrik pembuatannya. Pada Gambar 2.18 ditunjukan besarnya beban Polished rod (W) ditransmisikan ke crank melalui pitman yang bergerak dengan arah vertikal. Dari
Gambar 2.18 tersebut puntiran bersih terhadap O dinyatakan (Craft-Holden,
1962),sebagai berikut :
T = Wr sinθ – We d sinθ...(2-53)
Keterangan :
T = Gaya puntiran, Lbs W = Beban polished rod, Lbs We = Counterweight, Lbs
e = Jarak dari crankshaft ke Pitman bearing (Gambar 2.18) d = Jarak dari Crankshaft ke pusat titik O, in
θ = Posisi kedudukan Crankshaft (Gambar 2.18)
θ = Sudut yang dibentuk oleh crank dengan bidang vertikal, derajat
Apabila geometri dari peralatan permukaan diabaikan, yaitu jarak dari “saddle bearing” ke “tail bearing” serta “struktural unbalance” dari instalasi permukaan, maka akan diperoleh persamaan untuk :
Keterangan :
C = Crank counterbalance, lbs Wc = Berat counterbalance, lbs S = Panjang langkah, in
Gambar 2.18
Gaya-gaya Yang Bekerja pada Crank 2)
Subtitusi Persamaan (2-53) ke Persamaan (2-54) akan diperoleh : T = W (S/2) sin θ C (S/2) sin θ
= (W –C) (S/2) sin θ...(2-55) Harga maksimum untuk variabel-variabel W dan sin θ masing –masing adalah Wmax dan sin θ = 1 atau θ = 90, dengan demikian puntiran maksimum (peak
torque) adalah :
Tp = (Wmax –C) (S/2)...(2-56)
Keterangan :
Tp = Peak torque maksimum, Lbs
Dalam perhitungan harga peak torque (C) diasumsikan 95% dari harga idealnya (Ci), maka Persamaan (2-56) menjadi :
2.3.4. Kapasitas Pompa (Pump Displacement)
Dengan prinsip torak (piston), maka volume teoritis pemompaan (Pump
displacement) adalah :
V = Ap (in2) x Sp (in / stroke) x N
bbl in hari menit x menit Stroke 3 9702 / 1440 = 0.1484 Ap Sp N bbl / hari ...(2-58)
Persamaan (2-58) di atas harga 0.1484 Ap merupakan konstanta untuk suatu diameter plunger tertentu dan dinotasikan dengan K yang disebut sebagai konstanta pompa (Tabel II-6) :
V = K Sp N bbl / hari...(2-59)
2.3.5. Efisiensi Total Pompa Sucker Rod
Dengan mengetahui besarnya horse power, maka akan dapat ditentukan efisiensi total dari pompa sucker rod. Efisiensi total pompa adalah hasil kali dari dua efisiensi, yaitu efisiensi permukaan (above ground efficiency) dan efisiensi bawah permukaan (bellow ground efficiency). Besarnya horse power yang perlu diketahui disini adalah :
• Polished rod horse power (PRHP)
• Hidroulic horse power (HHP)
• Power input (power yang dibutuhkan prime mover selama pemompaan berjalan) atau brake horse power (BHP)
2.3.5.1. Beban polished rod (Polished Rod Load/PRL)
Selama siklus pemompaan terdapat lima faktor yang mempengaruhi beban bersih (net load) polished rod yaitu :
a. Beban fluida
b. Beban mati dari pada rod
c. beban percepatan dari pada sucker rod
d. Gaya ke atas pada sucker rod yang tercelup dalam fluida e. Gaya gesekan