Fakultas Ilmu Komputer
7130
Rancang Bangun Alat Pendeteksi Kecelakaan Mobil Menggunakan Sensor
Akselerometer dan Sensor
801s Vibration
Adnan Mahfuzhon1, Tibyani2, Gembong Edhi Setyawan3
Program Studi Teknik Informatika, Fakultas Ilmu Komputer, Universitas Brawijaya
Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Peningkatan infrastruktur, terutama jalan dan jalan tol, akan membuat industri jasa transportasi semakin menjanjikan. Salah satunya adalah bisnis jasa sewa mobil yaitu meningkat hingga 70%. Ada sejumlah alasan, kenapa jasa sewa mobil lebih menjadi pilihan dari pada membeli atau memiliki mobil sendiri, terutama bagi kalangan dunia usaha. Selain menghemat anggaran, menyewa kendaraan bermotor juga menghilangkan sejumlah kerepotan, seperti soal pemeliharaan, perpanjangan surat kendaraan bermotor, bahkan menghilangkan risiko kehilangan kendaraan bermotor. Berdasarkan data yang di dapat dari meningkatnya usaha jasa sewa mobil perlunya upaya menjaga kenyamanan antara pemberi jasa dengan pelanggan, hal yang perlu diperhatikan ketika pemberi jasa harus menjaga asetnya berupa mobil mereka yang sedang disewa. Dan pelanggan harus menjaga mobil yang sedang mereka sewa. Dari permasalahan tersebut diperlukan adanya penelitian yang terkait dengan notifikasi kecelakaan untuk menjaga aset prusahaan dan kenyamanan pelanggan. Proses pengamilan data uji dengan cara manual untuk di jadikan data masukan untuk perhitungan naïve bayes. Penyesuaian data di tetapkan dengan mengacu pada data akselerometer jika data lebih dari 4g maka masuk dalam kondisi kecelakaan. Pengambilan data dari kondisi berjalan di dapat persentase kesesuaian sebesar 90%, lalu pada saat pengambilan dalam kondisi berhenti mendadak sebesar 78%, dan saat kondisi kecelakaan sebesar 98%. Dari hasil data uji dari hasil klasifkasi menggunakan metode naïve bayes didapat degan pengambilan data uji pada masing masing 16 kali pengujian pada setiap skenario, pada kondisi berjalan didapat nilai keakurasian sebesar 98,7 %, kondisi berhenti mendadak didapat nilai keakurasian sebesar 87,5 %, dan kondisi kecelakaan didapat nilai keakurasian sebesar 98,7 %.
Kata Kunci : Pendeteksi kecelakaan, Naïve Bayes, MMA7361, 801s vibation.
Abstract
The improvement of infrastructure, especially road and freeway, will make the transportation service industry more promising. One of them is car rental service business, increases up to 70%. There are several reasons why car rental service becoming the first choice than buying or owing a car, specifically for business world. Besides saving the budget, renting a motorbike also erasing several difficulties, for instances, maintenance, extension for important letters, even decreasing losing the motorbike. Based on the data obtained from the increasing of car rental service business, it is needed to keep the comfort between the service provider with the customer. The important thing to be noticed, when the service provider must maintain the rental cars. Also, the customer must take care of the rented car. From the problem, it is need to conduct a research related to accidental notification for keeping the cars and
customer’s comfort. The process of collecting the test data manually to be made the input for calculating
naïve bayes. The data adjustment is set by referring to accelerometer data, if the data is more than 4 grams so it is categorized in accident condition. Collecting the data in the running condition obtained the value of accuracy up to 90%, then when collecting in the sudden stop condition obtained up to 78%, and in accident condition obtained up to 98%. The data test results from the classification results using naïve bayes, they are obtained by collecting the test data in each one for 16-time tests in every scenarios. In running condition, it is obtained the value of accuracy up to 98,7%, in the sudden stop condition obtained the value of accuracy up to 87,5% and in the accident condition obtained the value of accuracy up to 98,7%.
1. PENDAHULUAN
Pemerintah Indonesia menargetkan
pembangunan jalan tol yang di rencanakan pada tahun 2015 hingga 2019 yang di targetkan 1000 km, berdasarkan data badan pengatur jalan tol hingga awal tahun 2017 telah dioperaikan 984 km jalan tol di seluruh tanah air, dengan adanya penambahan jalan tol baru sepanjang 1.851 km maka jalan tol di Indonesia hingga akhir tahun 2018 mencapai 2.835 km (BPJT, 2018).
Peningkatan infrastruktur, terutama jalan dan jalan tol, akan membuat industri jasa transportasi semakin menjanjikan. Salah satunya adalah bisnis jasa sewa mobil yaitu meningkat hingga 70% beradasarkan data organisasi
pengusaha rent car daerah (ASPERDA) jumlah
kendaraan yang di miliki angotanya sekitar 10.000 unit, meningkatnya jasa penyewaan ini mencakup penyewaan mobil berbasis aplikasi
atau peyewaan mobil konfensional (Kristianto,
2018).
Berdasarkan data yang di dapat dari meningkatnya usaha jasa sewa mobil perlunya upaya menjaga kenyamanan antara pemberi jasa dengan pelanggan, hal yang perlu diperhatikan ketika pemberi jasa harus menjaga asetnya berupa mobil, ketika mobil sedang disewa. Dan pelanggan harus menjaga mobil yang sedang mereka sewa. Dari data yang di ambil dari
tempat penyewaan mobil yaitu Rent Car Tama
yang bertempat di cileungsi, jawa barat. Perusahaan tersebut memiliki aset mobil yang
tidak sedikit, perusahaan tersebut bisa
mendapatkan pelanggan setidaknya dalam 1 bulan permintaan sewa mobil 200 hingga 800 pelanggan data tersebut mencakup data peminjaman jangka panjang maupun jangka pendek, perusahaan memiliki kendala untuk
menidentifikasi kerusakan pada asetnya
(Hidayat, 2018).
Dari permasalahan yang telah dipaparkan oleh (Hidayat, 2018), diperlukan sebuah sistem dimana dapat memberikan notifikasi akibat kecelakaan untuk menjaga asset dan menjaga dari pelanggan yang terkadang menutupi kesalahannya untuk mengganti kerusaan pada mobil yang di sewa. Oleh karena itu penulis
mengusulkan judul skripsi “Rancang Bangun
Alat Pendeteksi Kecelakaan Mobil
Menggunakan Sensor Akselerometer Dan
Sensor 801S Vibration”. Sistem ini nantinya
akan dapat mendeteksi kecelakaan dengan
menggunakan metode Naïve Bayes, metode ini
merupakan klasifikasi yang didasarkan pada
aturan Bayes dan sekumpulan asumsi
independensi kondisional sehingga metode cocok untuk di terapkan pada kasifikasi tingkat prediksi pada sistem deteksi tabrakan (Astuti, 2016).
Dalam penelitian sebelumnya yang
dilakukan oleh sudaryatmo (2016) tentang Sistem deteksi kecelakaan menggunakan sensor akselerometer sebagai pembaca kondisi dari sistem saat kondisi membaca perubahan
percepatan lebih dari 4g (g-force)
mikrokontroler mengaktifkan buzzer dari sistem deteksi, data yang hasil perubahan dilihat
menggunakan serial monitor dan notifikasi akan
di kirim menggunakan wireless module untuk di
proses mikrokontroler kedua untuk menerima notifikasi. Penelitian mengalami kendala ketika sensor akselerometer tidak bisa membedakan antara pengereman dengan kecelakaan sehingga nilai yang di hasilkan tidak sesuai untuk di jadikan notifikasi kecelakaan.
Dengan adanya penelitian ini harapannya dapat membuat pihak perusahaan penyewaan mobil dapat menggunakan alat ini untuk menjaga aset mereka dari kecurangan pelanggan akibat kecelakaan kecil misal menyebabkan mobil rusak, ataupun menjadikan alat ini sebagai kenyamanan untuk pelanggan agar jika ada kecelakaan dapat memberikan notifikasi secepat mungkin.
2. PERANCANGAN DAN
IMPLEMENTASI
2.1 Gambaran umum sistem
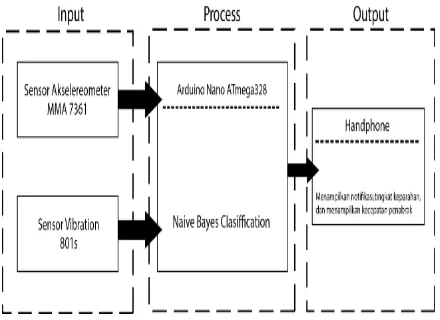
Berikut Gambar 1 menjelaskan diagram blok dari sistem yang terdiri dari tiga blok yaitu input, proses dan output.
Gambar 1 Diagram Blok Sistem
pendeteksi kecelakaan mobil menggunakan
sensor akselerometer dan sensor 801S vibration
akan memiliki input berupa nilai getaran dan nilai perubahan akselerometer dari sumbu X dan sumbu Y. sistem akan di klaibrasi untuk nilai awal akselerometer selama 1000ms, sensor getar
akan di jadikan triger jika amplitude yang
dihasilkan telah melebihi batas, setelah sensor getar mengizinkan untuk pengambilan data maka mikrokontroler akan memproses data menggunakan naïve bayes, klasifikasi di dalam perhitungan naïve bayes dibagi menjadi tiga
yaitu berjalan, berhenti mendadak, dan
kecelakaan. Setelah klasifikasi menggunakan naïve bayes dihitung dan hasil yang di dapat hanya masuk kedalam perhitungn berjalan atau berhenti mendadak maka proses tidak akan diteruskan untuk di kirmkan notifikasinya, jika perhitungan menunjukan klasifikasi masuk kedalam perhitungan kecelakaan maka sistem akan mengirimkan melalui module SIM 800l.
2.2 Perancangan perangkat keras
Sistem akan menggunakan 6 jenis
perangkat keras yang terdiri dari Arduino nano, sebagai mikrokontroler yang di pakai pada sistem ini, sensor akselerometer MMA 7361 untuk membaca akselerasi mobil dari sumbu X
dan Y, sensor vibration 801s untuk menjadikan
nilai tambahan pendukung pada data yang akan diproses, Module SIM800l untuk mengirim notifikasi hasil perhitungan melalui SMS, Module Bluetooth HC-05 di pakai untuk pengujian untuk mendapatkan nilai hasil.
Pada Gambar 2 adalah desain rangkaian perangkat keras sistem, dan Gambar 3 adalah desain schemantic perangkat keras sistem.
Gambar 2 Desain Rangkaian Perangkat Keras
2.3 Perancangan perangkat lunak
Perancangan perangkat lunak dibagi
menjadi 2 yaitu perancangan perangkat lunak untuk pengambilan data latih dan perancangan perangkat lunak untuk pengambilan data uji.
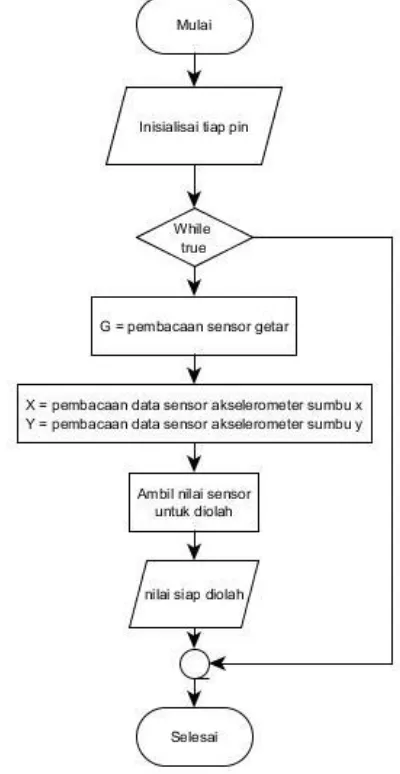
Perancangan perangkat lunak untuk
pengambilan data di jelaskan pada flowchart yang tertera pada gambar 4.
Gambar 4 Diagram alur perancangan perangat lunak pengambilan data latih
Tahapan pengambilan data latih yaitu awal semua sensor harus di inisialisasi sesuai perancangan yang telah di buat terlebih dahulu, lalu sensor getar dan akselerometer bisa membaca hasil dari perubahan perubahan, jika bisa ambil data dari nilai sensor, pada tahap ini hasil data latih akan disimpan dan di ambil nilai amplitude pada setiap kondisi yaitu kondisi berjalan, berhenti mendadak dan tabrakan.
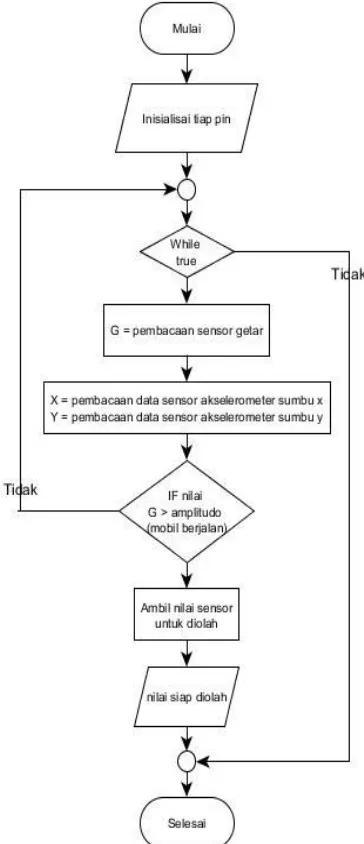
berikut adalah flowchart dari perancangan klasifikasi naïve bayes yang akan di jelaskan pada gambar 5
Proses klasifikasi menggunakan metodde naïve bayes di jabarkan pada Gambar 5 proses pertama pembacaan sensor yang dimana nilai pembacaan dapat mempengaruhi klasifikasi nilai akhirnya, data klasifikasi di pengaruhi oleh data latih yang telah dibuat. Tahap perhitungan dimulai dengan menentukan nilai fungsi dari data prior(), nilai fungsi Gausian(), dan menentukan nilai fungsi Posterior(), adapun penjelasan dari fungsi fungsi tersebut sebagai berikut.
Tahap prior untuk menghitung nilai klasifikasi pada masing masing keadaan dengan cara membagi banyak data dalam satu kelas di dalam sistem ini di bagi menjadi tiga kelas yaitu mobil berjalan, mobil berhenti mendadak dan mobil kecelakaan.
Gambar 5 Diagram alur perancangan perangat lunak Klasifikasi naïve bayes
Tahap Gausian pada tahap ini menentukan nilai dari masing masing fitur pada sistem ini menggunakan 3 fitur yaitu 2 fitur dari pembacaan sensor MMA7361 akselerometer diambil nilai dari sumbu X dan nilai dari sumbu Y. serta 1 fitur dari nilai sensor getar 801s.
Tahap terakhir adalah tahap posterior
tahapan dimana untuk menentukan besar peluang dari masing-masing kelas yang akan di hitung ketika terjadi ketika adanya masukan dari setiap fitur.
Perancangan perangkat lunak terakhir adalah perancangan pengambilan data uji, dimana peroses ini mengabungkan data hasil uji dan memasukkan proses perhitungan klasifikasi
naïve bayes. Berikut adalah flowchart
perancangan pengambilan data uji yang dipaparkan pada gambar 6.
Pengambilan nilai data uji dilakukan setelah pengambilan data latih, pengambilan data uji menggunakan nilai atau amplitude tertinggi dari sensor getar. Yang akan di jelaskan sebagai berikut:
2.4 Implementasi perangkat keras
Setelah melakukan perancangan perangkat keras, berikut hasil implementasi perancangan perangkat keras yang akan ditampilkan pada Gambar 7.
Gambar 7 Implementasi perangkat keras
Pada perancangan perangkat keras diatas, semua komponen diletakan pada bagian dalam mobil remot control yang telah dibuat. Hal ini dikarenakan agar mempermudah pada proses pengambilan data data latihnya. hasil rangkain implementasi dimana sensor MMA7361 dan sensor 801s di rangkai sesuai perancangan dan di masukkan kedalam mobil remote kontrol diletakkan pada titik tengah mobil. Dihubungkan melalui kabel dan dirangkai di atas PCB. Dan untuk modul SIM800l di hubungan dengan
regulator DC dikarenakan SIM 800l
membutuhkan tegangan antara 3.6v-4.5v Hasil impelementasi prototipe beserta peletakan komponen elektoronik yang digunkan di tunjukan pada Gambar 8 sebagai berikut.
Gambar 8 Prototipe Sistem
3. PENGUJIAN
Pengujian yang dilakukan antara lain pengujian Sistem deteksi tabrakan pada setiap kondisi, pengujian deteksi tabrakan dengan
klasifikasi naïve bayes, dan pengujian
pengiriman SMS menggunakan module SIM 800l.
3.1 Pengujian Sistem Deteksi Tabrakan Pada Setiap Kondisi
Tujuan dilakukannya pengujian ini untuk mengetahui apakah nilai yang di baca oleh sensor dapat di gunakan sebagai nilai data latih yang di mana nilai tersebut dimasukkan kedalam program naïve bayes, acuan yang di gunakan sesuai dengan skenario dan sesuai dengan penelitian terdahulu dimana nilai yang di dapat sensor akselerometer pada saat kejadian kecelakaan adalah >4g.
Prosedur pengujian dalam pengujian
fungsional sistem, yaitu :
1. Menghubungkan sistem deteksi tabrakan
pada mobil remote control dengan laptop
melalui kabel serial.
2. Dilakukan pengujian dengan 3 skenario
untuk mendapatkan nilai pembacaan dari sensor dari setiap kondisi. Yang di jelaskan sebagai berikut :
a. Pengujian mobil remote control dalam
kondisi berjalan kedepan tanpa
mengerem, dilakukan sebanyak 10 kali pengambilan data.
b. Pengujian mobil remote control dalam
kondisi berjalan lalu mengerem,
dilakukan sebanyak 14 kali
pengambilan data.
c. Pengujian mobil remote control dalam
kondisi di tabrakkan kea rah tembok, dilakukan sebanyak 16 kali pengamilan data.
Total pengambilan data dari setiap kondisi yaitu 40 kali percobaan. Semua percobaan di
lakukan dengan jarak percobaan dari titik “A” ke titik “B” sejauh 3 meter.
Setelah dilakukan pengujian setiap kondisi maka di dapat berapa hasil dari beberapa sensor pada gambar 9 untuk sensor getaran dan pada
gambar 10 untuk sensor akselerometer
Gambar 9 Hasil penambilan data latih getaran (berjalan)
Gambar 10 Hasil penambilan data latih akselerometer (berjalan)
Gambar di atas menunjukan grafik dari sensor 801s pada Gambar 9 dapat dilihat nilai perubahan nilai sensor getaran pada sisi vertical adalah besaran nilai sensor getar yang di dapat
Gambar 10 menunjukan grafik sensor MMA7361 perubahan nilai sensor pada sisi vertical adalah pembacaan percepatan dan sisi horizontal adalah data sempel dari pembacaan percepatan, untuk nilai maksimum pada sumbu X sebesar 5.72 dan sumbu Y sebesar 4.56. untuk rata-rata dari masing masing sumbu ,untuk X yaitu 2,8g dan Y adalah 2.8g
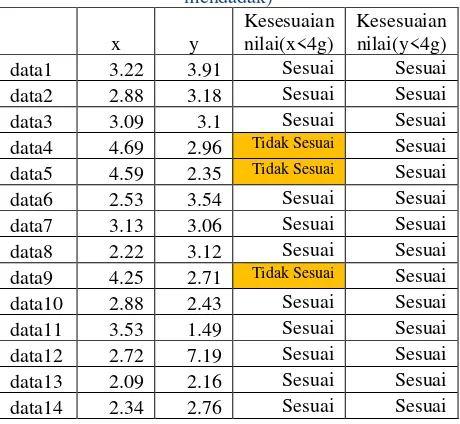
Berikut merupankan tabel kesuaian
pengambilan nilai dari akselerometer, yang di paparkan pada table 1.
Tabel 1 kesesuaian pengambilan data (berjalan)
x y pada gambar 12 untuk sensor akselerometer merupakan hasil pengambilan data latih dari kondisi berhenti mendadak.
Gambar 11 Hasil penambilan data latih getaran (Berhenti mendadak)
Gambar 12 Hasil penambilan data latih akselerometer(Berhenti mendadak)
Gambar di atas menunjukan grafik dari sensor 801s pada Gambar 6.3 dapat dilihat nilai perubahan nilai sensor getaran pada sisi vertical adalah besaran nilai sensor getar yang di dapat
Gambar 6.4 menunjukan grafik sensor MMA7361 perubahan nilai sensor pada sisi vertical adalah pembacaan percepatan dan sisi horizontal adalah data sempel dari pembacaan percepatan, untuk nilai maksimum pada sumbu X sebesar 7,19 dan sumbu Y sebesar 4,59. untuk rata-rata dari masing masing sumbu ,untuk X yaitu 3,15g dan Y adalah 3,14g.
Berikut merupankan tabel kesuaian pengambilan nilai dari akselerometer pada kondisi berhenti mendadak, yang di paparkan pada table 2.
Tabel 2 kesesuaian pengambilan data (Berhenti mendadak) pada gambar 14 untuk sensor akselerometer merupakan hasil pengambilan data latih dari kondisi kecelakaan.
Gambar 13 Hasil penambilan data latih getaran (kecelakaan)
Gambar 14 Hasil penambilan data latih akselerometer (kecelakaan)
Gambar di atas menunjukan grafik dari sensor 801s pada Gambar 6.5 dapat dilihat nilai perubahan nilai sensor getaran pada sisi vertical adalah besaran nilai sensor getar yang di dapat
Gambar 6.4 menunjukan grafik sensor MMA7361 perubahan nilai sensor pada sisi vertical adalah pembacaan percepatan dan sisi horizontal adalah data sempel dari pembacaan percepatan, untuk nilai maksimum pada sumbu X sebesar 25,12 dan sumbu Y sebesar 21,79. untuk rata-rata dari masing masing sumbu ,untuk X yaitu 11.28g dan Y adalah 8,33g.
Berikut merupankan tabel kesuaian
pengambilan nilai dari akselerometer pada kondisi berhenti mendadak, yang di paparkan pada table 3.
Tabel 3 kesesuaian pengambilan data (kecelakaan)
x y
3.2 Pengujian deteksi tabrakan
menggunakan naïve bayes.
Tujuan dilakukannya pengujian ini di maksudkan untuk mengetahui keakurasian sistem melakukan klasifikasi menggunakan metode naïve bayes.
Prosedur pengujian dalam pengujian
fungsional sistem, yaitu :
1. Menghubungkan sistem deteksi tabrakan
melalui kabel serial.
2. Pengujian dilakukan sebanyak 15 kali , pada
setiap kejadian berjalan, kejadian berhenti mendadak, dan kejadian menabrak.
3. Sistem akan membaca dan menghitung nilai
klasifikasi ketika sensor getar mamberi nilai >5000.
4. Hasil klasifikasi menghasilkan prediksi dari
presiksi nilai sensor dan menampilakan prediksi.
5. Penentuan hasil akurasi klasifikasi sistem
akan di bandingkan dengan pengamatan secara langsung.
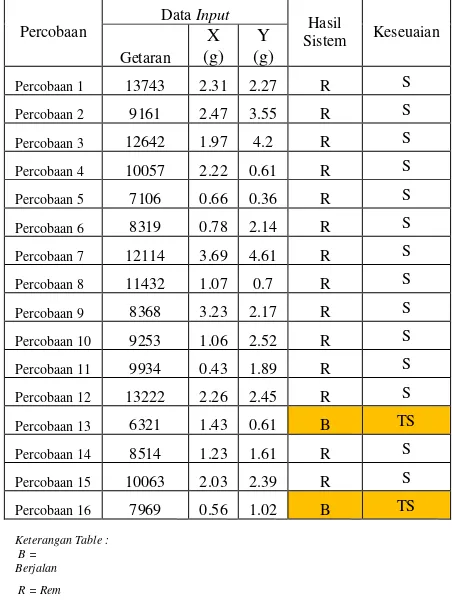
Pada pengujian ini di dapat hasil dari beberapa kejadian pengujian pertama yaitu pengujian saat mobil remote control berjalan menggunakan klasifikasi naïve bayes. Berikut merupakan hasil pengujian pada tabel 4.
Tabel 4 Pengujian Saat Mobil Berjalan
Percobaan
Data Input
Hasil
Sistem Keseuaian Getaran
Keterangan Table : B = Berjalan R = Rem S = Sesuai TS = Tidak Sesuai
Berdasarkan pengujian klasifikasi keadaan kondisi mobil menggunakan metode naïve bayes yang di tunjukan pada tabel 4, menunjukan bahwa dari 16 data dari kedaan berjalan terdapat 1 data yang tidak sesuai dengan keadaan yaitu terbaca keadaan berhenti mendadak. Berikut proses perhitungan akurasi adalah sebagai berikut:
Berdasarkan perhitungan didapat nilai sebesar 93,7 % dari pengujian sistem dalam kondisi berjalan, dengan menggunakan metode naïve bayes.
Pengujian kedua yaitu pengujian saat mobil
remote control berhenti mendadak
menggunakan klasifikasi naïve bayes. Berikut merupakan hasil pengujian pada tabel 5.
Tabel 5 Pengujian Saat Mobil berhenti mendadak
Percobaan
Data Input Hasil
Sistem Keseuaian Getaran
Keterangan Table : B =
Berdasarkan pengujian klasifikasi keadaan kondisi mobil menggunakan metode naïve bayes yang di tunjukan pada tabel 5, menunjukan bahwa dari 16 data dari kedaan berjalan terdapat 2 data yang tidak sesuai dengan keadaan yaitu terbaca keadaan Berjalan. Berikut proses perhitungan akurasi adalah sebagai berikut:
Akurasi = 𝑇𝑜𝑡𝑎𝑙 𝐷𝑎𝑡𝑎−𝐷𝑎𝑡𝑎 𝑇𝑖𝑑𝑎𝑘 𝑆𝑒𝑠𝑢𝑎𝑖
𝑇𝑜𝑙𝑎𝑙 𝑑𝑎𝑡𝑎 × 100%
=
16−216
× 100%
= 87,5 %
Berdasarkan perhitungan didapat nilai sebesar 87,5% dari pengujian sistem dalam
kondisi Berhenti Mendadak, dengan
menggunakan metode naïve bayes.
P
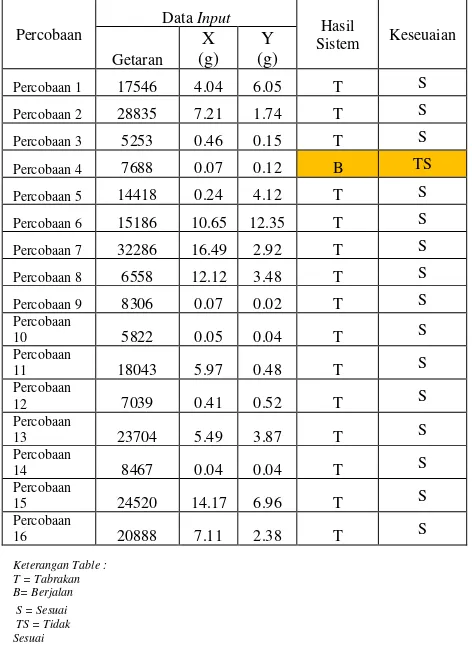
engujianketiga
yaitu pengujian saatklasifikasi naïve bayes. Berikut merupakan hasil pengujian pada tabel 6.
Tabel 6 Pengujian Saat Mobil berhenti mendadak
Percobaan
Data Input Hasil
Sistem Keseuaian Getaran
Keterangan Table : T = Tabrakan B= Berjalan S = Sesuai TS = Tidak Sesuai
Berdasarkan pengujian klasifikasi keadaan kondisi mobil menggunakan metode naïve bayes yang di tunjukan pada tabel 6, menunjukan bahwa dari 16 data dari kedaan berjalan terdapat 1 data yang tidak sesuai dengan keadaan yaitu terbaca keadaan Berjalan. Berikut proses perhitungan akurasi adalah sebagai berikut:
Akurasi = 𝑇𝑜𝑡𝑎𝑙 𝐷𝑎𝑡𝑎−𝐷𝑎𝑡𝑎 𝑇𝑖𝑑𝑎𝑘 𝑆𝑒𝑠𝑢𝑎𝑖
𝑇𝑜𝑙𝑎𝑙 𝑑𝑎𝑡𝑎 × 100%
= 16−1
16 × 100%
= 93,7 %
Berdasarkan perhitungan didapat nilai sebesar 93,7% dari pengujian sistem dalam kondisi Kecelakaam, dengan menggunakan metode naïve bayes.
3.3 Pengujian Pengiriman Notifikasi
Menggunakan SIM 800l
Berdasarkan pengujian saat pengujian
Kecelakaan mobil Remote Control dari 16 kali
percobaan yang di terangkan pada tabel 6.6
pengiriman notifikasi melalui SMS
menggunakan module SIM 800l akan dijalankan
ketika mobil terindentikasi kecelakaan makan dari Hasil pengiriman yang berhasil adalah 15 kali berhasil terkirim dan 1 kali gagal.
4. KESIMPULAN
1. Pada perancangan deteksi kecelakaan ini
dilakukan rekayasa pengambilan data menggunakan scenario yang dibagi menjadi tiga yaitu berjalan, berhenti mendadak dan kecelakaan. Dari scenario tersebut di dapat nilai terendah untuk sensor getar yaitu 5000, nilai tersebut di jadikan trigger perhitungan metode naïve bayes.
2. Pada implementasi sistem dilakukan proses
pengamilan data uji dengan cara manual untuk di jadikan data masukan untuk perhitungan naïve bayes. Penyesuaian data di tetapkan dengan mengacu pada data akselerometer jika data lebih dari 4g maka
masuk dalam kondisi kecelakaan.
Pengambilan data dari kondisi berjalan di dapat persentase kesesuaian sebesar 90%, lalu pada saat pengambilan dalam kondisi berhenti mendadak sebesar 78%, dan saat kondisi kecelakaan sebesar 98%.
3. Hasil data uji dari hasil klasifkasi
menggunakan metode naïve bayes didapat degan pengambilan data uji pada masing masing 16 kali pengujian pada setiap skenario, pada kondisi berjalan didapat nilai keakurasian sebesar 98,7 %, kondisi berhenti mendadak didapat nilai keakurasian sebesar 87,5 %, dan kondisi kecelakaan didapat nilai keakurasian sebesar 98,7 %.
5. DAFTAR PUSTAKA
Astuti, E. H. (2016). Sistem Pendukung
Keputusan Deteksi Dini Penyakit Stroke Menggunakan Metode Naive Bayes.
Malang: Universitas Brawijaya.
BPJT. (2018). Badan Pengatur Jalan Tol
Kementrian PUPR Republik Indonesia. Retrieved February 25, 2018, from http://bpjt.pu.go.id/konten/progress/ber operasi
Hidayat, A. (2018, March 12). Supervisor.
Invensense. (2013). MPU-6000/MPU-6050
Product Specification (3.4 ed.). Sunnyvale: Invensense.
Kristianto, F. (2018, 02 25). bisnis rental mobil.
5/12/742925/bisnis-rental-mobil-diprediksi-terdongkrak-70-persen
Sudaryatmo, D. (2016). Sistem deteksi tabtakan
pada mobil menggunakan sensor akselerometer (- ed.). malang: universitas brawijaya.
Weiner, S. J. (2010). Feasibility of a 802.11