37
Perbaikan Respon Transient Pengaturan Kecepatan Motor DC
Menggunakan Kontroler "
Look Up Table
" Berbasis FLC-PI
dengan "
Scheduling
Gain
"
Ari Santoso
Delon
Rusdhianto EAK
A. Fatoni
Laboratory of Control Engineering, Department of Electrical Engineering - ITS, Kampus Keputih, Sukolilo, Surabaya 60111, Indonesia
Phone : +62-31-5947302, Fax : +62-31-5931237, Email : [email protected]
Abstrak - Pada motor DC jika diberikan beban yang berubah sekitar 20% dari beban nominalnya maka responnya akan mengalami perubahan yang sangat signifikan walaupun kontroler telah diberikan. Ada beberapa cara untuk mengatasi permasalahan ini salah satunya adalah dengan menggunakan kontroler adaptif, akan tetapi untuk motor DC akan mengalami kesulitan karena time responnya lebih cepat dari frekuensi perhitungan dari kontroler adaptifnya. Untuk itu pada penelitian ini kami memanfaatkan FLC-PI yang ditransformasikan ke dalam sebuah kontroler Look Up Table dengan menggabungkan dengan Scheduling Gain untuk mengatasi kekasaran kontroler tsb. Untuk menguji fungsi dari kontroler ini maka plant diuji dengan menggunakan perubahan beban mekanik sekitar 20% dan kontroler yang didesain tsb diberlakukan hanya jika sistem mengalami perubahan parameter. Dan ternyata hasil dari penelitian ini sangat memuaskan untuk mengatasi perubahan beban yang signifikan pada plant dengan time respon yang cepat.
Kata kunci: kontroler Look Up Table, FLC-PI,
Scheduling Gain.
1. PENDAHULUAN
Pada sistem dengan frekuensi kerja yang tinggi akan mengalami kesulitan untuk mengendalikannya dan akan dibutuhkan kontroler yang mempunyai waktu perhitungan algoritma yang lebih cepat dengan demikian frekuensi kontroler tersebut akan lebih cepat, jika frekuensi kontrolernya lebih lambat dari time respon maka kontroler tersebut menyebabkan sistem menjadi sistem terlambat [7], untuk sistem seperti ini maka kestabilan dari sistem akan bergantung dari parameter sistem dan parameter waktu terlambatnya [7].
Motor DC jika diberi beban yang berubah-ubah maka akan menyebabkan parameter-parameter plant akan berubah [14] dimana perubahan itu merupakan fungsi dari perubahan beban yang diberikan. Jika dianggap perubahan beban tersebut menyebabkan adanya ketidakpastian parameter model maka penyelesaian yang sering dilakukan dengan tidak
mengabaikan karakteristik respon yang diinginkan maka digunakanlah kontroler robust dan ini telah dilakukan penelitian pendahuluan oleh Paulus SN [14] yaitu secara simulasi dengan menggunakan data real dari pengukuran sebuah motor DC yang diberi beban mekanik. Hasil dari penelitian ini secara keseluruhan baik sekali akan tetapi secara on-line belum dilakukan penelitian lebih lanjut.
Perubahan beban yang tidak terlalu besar dan untuk sistem yang tidak mempunyai respon yang terlalu cepat maka sistem pengaturan fuzzy adaptif (Neuro-Fuzzy Controller) bisa diaplikasikan [4][11][13] terlebih plantnya mempunyai komponen nonlinier. Akan tetapi hasil dari penelitian [4][11][13] menunjukkan bahwa sistem mempunyai keterbatasan daerah kerja yang bebannya berubah melebihi 30 % juga akan mengalami gangguan kestabilan untuk sistem yang mempunyai respon yang cepat.
Ada beberapa methode yang bisa diaplikasikan untuk mengatasi permasalahan tersebut salah satunya adalah PID dengan self tunning gain control [10], kana tetapi pada daerah kerja yang mengalami perubahan besar maka kontroler ini akan mengalami kesulitan.
Pada penelitian ini akan dibahas mengenai sistem pengaturan dengan menggunakan Look Up Table Controller berbasis logika fuzzy yang dikombinasikan dengan scheduling gain control yang diaplikasikan ke sistem pengaturan kecepatan motor DC karena plant ini mempunyai respon yang cepat. Kontroler Look Up Table sangat cepat responnya dan sangat cocok untuk plant-plant yang mempunyai kecepatan respon tinggi dan sangat sederhana pemrogrammannya kedalam bahasa dasar Assebly akan tetapi mempunyai kelemahan yang tidak bisa diabaikan yaitu responnya kasar dan seringkali responnya akan mengalami osilasi disekitar daerah steady state. Untuk mengatsi kelemahan tersebut maka digunakan scheduling gain control.
2. DISAIN SISTEM
38
u
E(x)3 -2
-4 -3 -1 1 2 4
NB NS NK SN PK PS PB
1
0.7
0.3
0
-5 5 (E)
pengendali dari plant untuk mengendalikan plant agar selalu mengikuti setting point meskipun dikenahkan perubahan parameter model maupun beban yang diberikan dalam hal ini sistem hanya diuji dengan memberikan perubahan beban.
3. PERANGKAT KERAS
Karena parameter dari plant motor DC akan berubah jika diberikan perubahan beban, maka diperlukan suatu kontroler dimana algoitma pengendalinya (parameter kontroler) dapat berubah mengikuti perubahan parameter plant tersebut. Untuk mengatasi problema ini secara sederhana dapat kita eliminasi dengan merancang suatu hardware gain kontrol, dimana gain ini bekerja berpedoman pada masukan error dan dikendalikan secara program melalui mikrokontroler. Karena algoritma yang akan digunakan pada rancangan ini adalah algoritma fuzzy Look Up Table berbasis PI, maka pengaturan gain dapat dilakukan pada parameter proporsional dari kontroler PI. Sehingga diharapkan dapat memperbaiki kinerja dari sistem dan mendapatkan respon output yang cepat menuju setpoint. Peracangan rangkain gain kontrol ini terdiri dari 8 variasi gain yang dapat disetting sesuai kebutuhan, seperti yang terlihat pada gambar 1.
Gambar 1. Rangkaian Gain Kontrol
4. KONTROLER
LOOK UP TABLE
Prinsip perancangan konroler fuzzy Look Up Table
sebenarnya hampir sama dengan kontroler fuzzy
biasa (statik). Bahkan penurunan anturan kontrol dari fuzzy Look Up Table berdasakan atas tahap-tahap penurunan kontroler fuzzy. Keunggulan konroler fuzzy Look Up Table dari kontroler fuzzy
adalah sinyal kontrol yang dihasilkan lebih cepat, karena sinyal kontrol telah tersedia dalam bentuk tabel, tanpa harus menjalankan proses fuzzy dalam beroperasi. Dengan alasan tersebut maka konroler
fuzzy Look Up Table lebih sederhana dan lebih mudah diimplementasikan pada sebuah minimum sistem (mikrokontroler). Ada beberapa tahap dalam merancang suatu konroler fuzzy Look Up Table
sebagai berikut:
Menentukan fungsi keangotaan bagi masukan, pada perancangan ini digunakan fungsi keanggotan segitiga dengan 7 variabel linguistik yaitu : NB (Negatif Besar), NS (Negatif Sedang), NK (Negatif Kecil) ,Z (Nol), PK(Positif Kecil), PS (Positif Sedang) PB (Positif Besar), seperti yang terliahat pada gambar 2.
Menentukan tingkat kuantisasi berdasarkan range variasi masukan dan keluaran, semangkin banyak level atau tingkat kuatisasi maka semakin peka kontroler terhadap perubahan masukan. Pada penelitian ini menggunakan 11 tingkat kuantisasi.
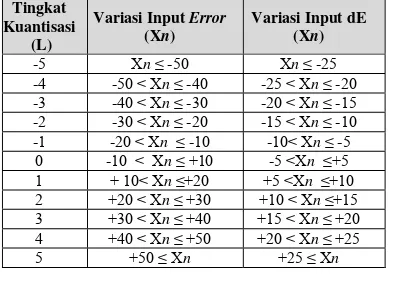
Tabel 1. Tingkat kuantisasi error(E) dan delta
error(dE) dalam diskrit
Tingkat Kuantisasi
(L)
Variasi Input Error
(Xn)
Variasi Input dE (Xn)
-5 Xn ≤ -50 Xn ≤ -25
-4 -50 < Xn ≤ -40 -25 < Xn ≤ -20 -3 -40 < Xn ≤ -30 -20 < Xn ≤ -15 -2 -30 < Xn ≤ -20 -15 < Xn ≤ -10 -1 -20 < Xn ≤ -10 -10< Xn ≤ -5
0 -10 < Xn ≤ +10 -5 <Xn ≤+5 1 + 10< Xn ≤+20 +5 <Xn ≤+10 2 +20 < Xn ≤ +30 +10 < Xn ≤+15 3 +30 < Xn ≤ +40 +15 < Xn ≤ +20 4 +40 < Xn ≤ +50 +20 < Xn ≤ +25
5 +50 ≤ Xn +25 ≤ Xn
Sehingga kita dapat memperbaruhi kurva fungsi keanggotaan terhadap masukan error (E) dan masukan perubahan error (dE) berdasarkan tingkatan kuantisasi., seperti yang terlihat pada gambar 2.
Gambar 2. Fungsi keanggotaan error dengan 7 variabel linguistik terhadap tingkatan kuantisasi
39
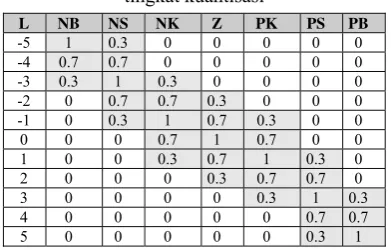
keanggotaan dari masing-masing variabel linguistik. Seperti yang terlihat pada Tabel 2.
Tabel 2. Diskrit semesta pembicaraan dengan 11 tingkat kuantisasi
Untuk mendapatkan nilai aksi kontrol (u) pada Look Up Table, diperlukan aturan kontrol (rule base). Dalam menyusun aturan kontrol untuk Look Up Table menggunakan Tabel 3 sebagai acuan.
Tabel 3. Tabel Keputusan Aturan Kontrol Fuzzy[3]
PERUBAHAN ERROR
Setelah didapat sinyal-sinyal masukan E dan dE dalam bentuk sinyal kuantisasi–5, –4, –3, –2, –1, 0, 1, 2, 3, 4, 5, kemudian dilakukan penyusunan dalam bentuk tabel. Untuk mendapatkan nilai aksi kontrol (u) perlu dilakukan proses deffuzifikasi, dalam hal ini menggunakan metoda COA (center of area).
Berpedoman pada tabel 2 dan tabel 3 diatas maka dapat dilakukan perhitungan deffuzifikasi untuk mendapatkan nilai aksi kontrol (u).Sehingga dapat disusun suatu tabel aksi kontrol seperti terlihat pada tabel 4.
Tabel 4. Tabel Look Up Table hasil perancangan [3]
Pada perancangan kontroler fuzzy PI, parameter proposional (gain) dari kontroler PI dapat diatur (schedulle) berdasarkan nilai masukan error (E) dengan tujuan agar respon ouput lebih cepat mencapai nilai setting point. Jadi dapat diasumsikan bahwa parameter gain dari kontroler PI merupakan fungsi dari error (E), seperti pada persamaan berikut ini:
)
(e
f
K
=
dimana K = proposional gainSecara sederhana dapat diturunkan suatu aturan kontrol (R) yang menyangkut kinerja dari
scheduling gain pada suatu kontroler fuzzy PI sebagai berikut :
R1 : Jika error (E) Besar maka K adalah Besar R2 : Jika error (E) Sedang maka K adalah Sedang R3 : Jika error (E) Kecil maka K adalah Kecil Akhir dari perancangan kontroler fuzzy PI maka dapat diperoleh suatu persamaan sinyal kontrol (u) sebagai berikut:
5. HASIL EKSPERIMEN DAN
ANALISIS
Pemberian scheduling gain ditentukan dengan cara pemilihan nilai gain yang terbaik, yang berpedoman pada kurva respon keluaran. Terdapat beberapa kondisi kritis yang perlu diperhatikan yaitu pada saat respon naik, nilai mendekati setting point
dan overshoot.
5.1. Respon Sistem Motor DC dengan Beban Nominal
Respon keluaran setelah diimplementasikan kontroler fuzzy PI dengan setting point ( 170 (desimal) = 3,33 Volt = 1870 rpm ), maka didapat respon output sebagai berikut :
¾ Percobaan 1 : Set Point 170(des), Gain
Proporsional 1
20 40 60 80 100 120
Time Sampling (200 ms)
BI
Respon Output Motor DC, Gain = 1
Output
u(k) Set Poi nt (170)
40
Respon Output Motor DC, K1=10,K2=1,K3=1
Output
Respon Output Motor DC, K1=16,K2=6,K3=4
Output
Pada percobaan satu gain scheduling dari kontroler PI (K1 sampai K8) disetting 1, sehingga dapat dilihat respon output yang lambat menuju
setting point atau mempunyai waktu naik (tr) yang lama sekitar 10,6 detik, tidak terjadi overshoot, dan
error steady state 0.6%.
Pada percobaan dua gain scheduling dari kontroler PI disetting dengan varaiasi sebagai berikut: K1 = 10 (des), K2 = 2 (des), K3 = 1 (des). Sehingga kelambatan respon dari ouput menuju
setting point dapat dikurangi atau lebih baik dari percobaan satu dengan waktu naik (tr) sekitar 4,2 detik, tidak terjadi overshoot, dan error steady state
0.6% .
Pada percobaan tiga gainscheduling dari kontroler PI disetting dengan variasi sebagai berikut : K1 = 16 (des), K2 = 6 (des), K3 = 4 (des). Respon dari ouput lebih cepat dengan waktu naik sekitar 0,6 detik, terjadi overshoot sekitar 11,88% dengan settling time 2,8 detik, dan error steady state 0.6%. Spesifikasi kontrol untuk masing-masing gain
kontrol K dari percobaan diatas dirangkum dalam tabel 5.
Tabel 5. Spesifikasi kontrol dengan K bervariasi untuk set point 170
Spesifikasi
Jadi dapat disimpulkan bahwa pemberian
gain yang terlalu kecil saat awal (rise time) akan meneyebabkan respon output yang lambat dalam mencapai nilai setting point, begitu juga pemberian
gain yang terlalu besar pada saat mendekati setting point, akan menyebabkan respon output yang berosilasi.
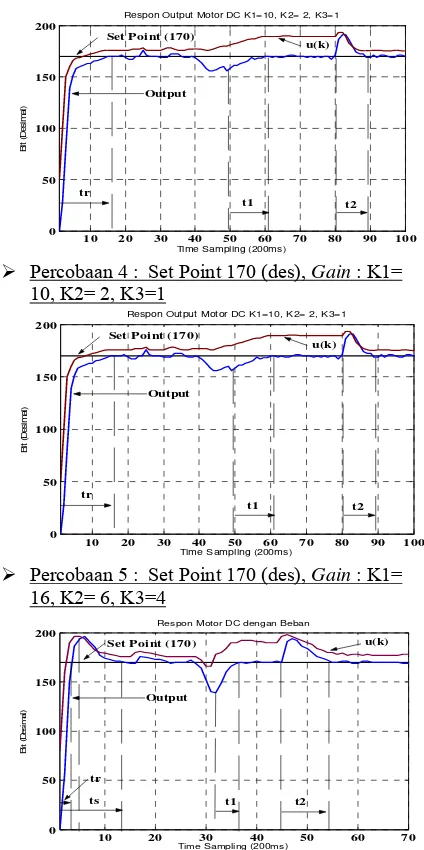
5.2. Respon Sistem Motor DC Dengan Perubahan Beban
Respon keluaran setelah diimplementasikan kontroler fuzzy PI dengan setting point ( 170 (desimal) = 3,33 Volt = 1870 rpm ), dengan diberikan beban magnetik pada motor DC, maka didapat respon output sebagai berikut :
10 20 30 40 50 60 70 80 90 100
Respon Output Motor DC K1=10, K2= 2, K3=1
Output
Respon Output Motor DC K1=10, K2= 2, K3=1
Output
Respon Motor DC dengan Beban
Output
Set Poi nt (170) u(k)
ts t1 t2
tr
41
waktu pemulihan (t2) ketika beban dilepas sekitar 1,8 detik.
Pada percobaan lima dengan varaiasi gain
sebagai berikut: K1 = 16 (des), K2 = 6 (des), K3 = 4 (des). Pada saat beban diberikan maka waktu naik yang dibutuhkan (t1) untuk mencapai setting point
lebih cepat dari percobaan 8, yaitu sekitar 1 detik. Sedangkan waktu pemulihan (t2) ketika beban dilepas sekitar 1,8 detik. Jadi dapat disimpulkan penentuan gain yang tepat akan membantu pada saat proses pebebanan motor DC.
6. KESIMPULAN
Dari hasil implementasi kontroler dan analisa data yang dilakukan dapat diambil kesimpulan sebagai berikut :
1. Kontroler fuzzy sistem look up table ini lebih baik bekerja pada daerah hysterisis yaitu disekitar setting point.
2. Fungsi dari scheduling gain dapat mempercepat respon output menuju setting point, serta membantu pada saat pembebanan.
7. DAFTAR PUSTAKA
[1]. Li-Xin Wang, 1997. A Course in Fuzzy Sistems and Control. Prentice-Hall International, Inc. [2]. Li Xin Wang, 1994, “Adaptive Fuzzy Sistem
and Control : Design and Stability Analysis”, Prentice Hall International.
[3]. Ari Santoso, 2000. “Sistem Pengaturan Cerdas” Lab. Sistem Pengaturan , JT Elektro ITS.
[4]. Nurlita Gamayanti, 2001, “Identifikasi Dan Desain Kontroller Logika Fuzzy Adaptif Pada Modul Process Control Simulator PCS 327 MK2”, Tugas Akhir, Teknik Elektro-ITS. [5]. Katsuhiko Ogata, 1997. Teknik Kontrol
Automatik, Jilid 1 Edisi Kedua. Penerbit Erlangga.
[6]. M.Rashid, 1992. Power Electronic Circuit, Device and Aplication, London: Pratice Hall. [7]. Ari SANTOSO, “Criteria Kestabilan Sistem
Linier Terlambat untuk Kasus Skalar”, IES’2001,ITS,Nopember 2001.
[8]. Ari SANTOSO, “Methode Optimal untuk Perhitungan dari Akar-akar Karakteristik Sistem Linier terlambat untuk Kasus scalar”, IES’2001,ITS,Nopember 2001.
[9]. Ari SANTOSO, Melina K. D., Rusdhianto EAK, A. Fatoni, “Sistem Pengaturan Proses menggunakan Kontroler Logika Fuzzy dengan Menggunakan Genetic Algorithms sebagai optimasi Parameternya”, SITIA '2002, ITS, 7 Mai 2002.
[10]. Ari SANTOSO, Iksanul Mokhtar, Rusdhianto EAK, A. Fatoni, “Tuning Parameter Kontroler Kp pada Sistem Pengaturan Kecepatan Motor AC-Servo Dengan Menggunakan PID-Self
Tuning Berbasis Fuzzy Logic”, SITIA'2002, ITS, 7 Mai 2002.
[11]. Ari SANTOSO, Nurlita Gamayanti,
Rusdhianto EAK, A. Fatoni, “Invers Kontrol dengan Menggunakan Model Logika Fuzzy pada Sistem Pengaturan Proses”, SITIA'2002, ITS, 7 Mai 2002.
[12]. Ari SANTOSO, Belier B., Nuh, M., Jazidi, A., Rameli, M., Castagne M, Falgayrettes P, ” Applied of Look Up Table Controller based of FLC (Fuzzy Logic Controller) in Non-linear Sistem : AFM(Atomic Force Microscopy)/PSTM (Photon Scanning Tunnel Microscope)”, IEEE-APCCAS’02 Bali-Singapore, 16-18 December 2002.
[13]. Ari SANTOSO, Wrastawa Ridwan,
Rusdhianto EAK, A. Fatoni, ”Memperbaiki Karakteristik Plant yang Mengalami Perubahan Parameter pada Daerah Kerja Steady State menggunakan Kontrol : Hybrid Logika Fuzzy Adaptif dan Kontroler PI”, Journal Java April 2003, JTE ITS.
[14]. Paulus Setiyo Nugroho, Ari SANTOSO,
Pengaturan Robust berbasiskan Quantitative Feedback Theory (QFT) untuk Mengatasi Ketidak pastian Parameter model Motor DC, Tugas Akhir, Maret 2003.