Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS 1
PERANCANGAN EMBEDDED
KONTROLER LQR ADAPTIVE
MENGGUNAKAN
MIKROKONTROLER UNTUK
PENGATURAN KECEPATAN MOTOR
DC
Aria Darmawan, Ir. Rusdhianto Effendi A. K., MT., Ir. Ali Fatoni, MT. Jurusan Teknik Elektro FTI – ITS
Abstrak – Motor DC banyak digunakan di berbagai bidang, dari bidang industri, peralatan rumah tangga bahkan mainan anak. Kemampuan mengejar setpoint dan kemampuan menjaga kecepatan sesuai setpoint ketika motor mengalami perubahan beban menjadi parameter baik buruknya kendali kecepatan.
Pada Tugas Akhir ini digunakan motor DC dengan magnet permanen sebagai plant yang akan dikontrol dengan teknik kontrol optimal Linear Quadratic Regulator (LQR) Adaptive. Pada motor DC dengan magnet permanen, perubahan kecepatan motor dapat diatur dengan cara mengubah-ubah besarnya parameter yang diberikan pada motor. Untuk perancangan dan pembuatan kontroler LQR Adaptive dengan meletakkan operasi algoritmanya pada memori mikrokontroler ATMEGA32.
Dari respon dapat dilihat bahwa semakin besar nilai parameter Q bernilai 3, dengan setpoint dan parameter R yang tetap, respon semakin cepat mencapai steady state.
Kata kunci : Motor DC, Kontroler LQR Adaptif, Mikrokontroler ATMEGA32.
I. PENDAHULUAN
Persoalan kontrol optimal telah menarik perhatian yang sangat besar selama dasawarsa terakhir sebagai akibat meningkatnya kebutuhan sistem dengan performansi tinggi disamping tersedianya fasilitas komputer digital. Untuk menyelesaikan persoalan sistem kontrol optimal, perlu dicari suatu aturan untuk menentukan pengambil keputusan sistem kontrol, dengan beberapa kendala tertentu, yang akan meminimumkan suatu ukuran simpangan dari perilaku idealnya. Ukuran ini biasanya ditetapkan berdasarkan indeks unjuk kerja sistem yang bersangkutan.
Pada Tugas Akhir ini digunakan motor DC dengan magnet permanen sebagai plant yang akan dikontrol dengan teknik kontrol optimal Linear Quadratic Regulator (LQR)
Adaptive. Pada motor DC dengan magnet permanen, perubahan kecepatan motor dapat diatur dengan cara mengubah-ubah besarnya parameter yang diberikan pada motor. Untuk perancangan dan pembuatan kontroler LQR
Adaptive dengan meletakkan operasi algoritmanya pada memori mikrokontroler ATMEGA32.
II. DISKRIPSI PLANT MOTOR DC
Motor merupakan perangkat listrik yang mengubah energi listrik menjadi energi mekanik. Motor DC banyak digunakan di berbagai peralatan karena torsinya yang besar seperti pada mesin bubut, mesin CNC, tracking antena atau sistem konveyer.
1. Prinsip Kerja [14]
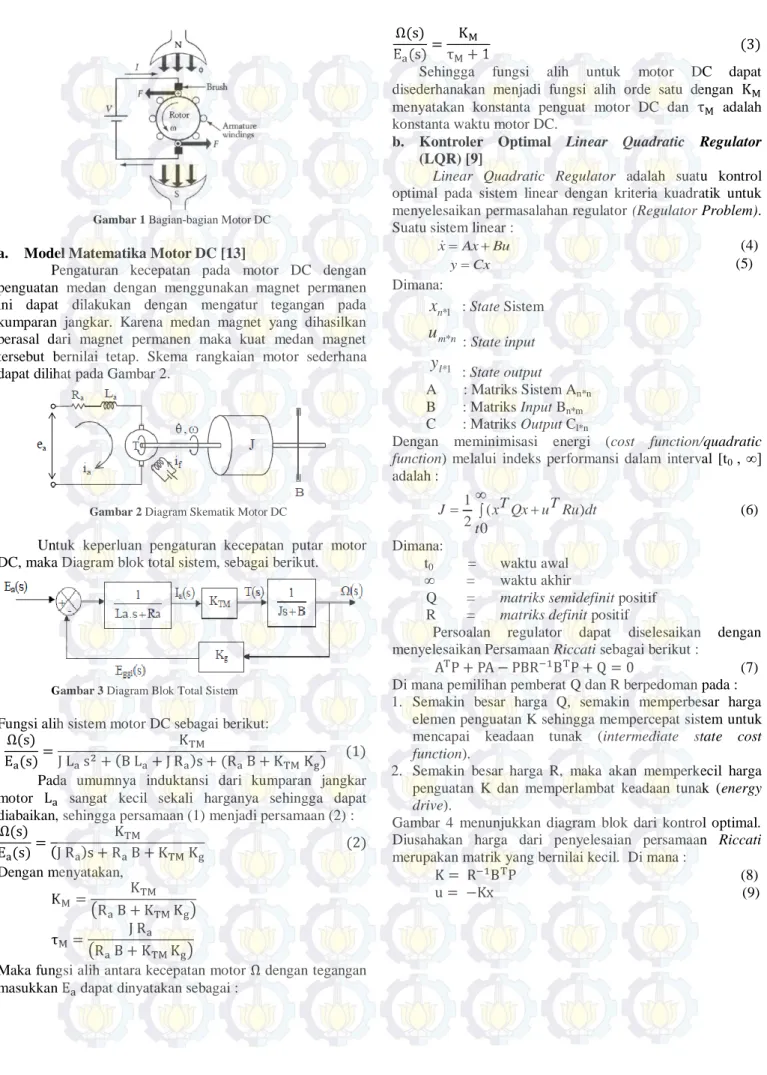
Pada Gambar 1 menggambarkan operasi dari satu mesin arus searah. Medan stator memproduksi fluks ϕ dari kutub U ke kutub S. Sikat-arang menyentuh terminal kumparan rotor dibawah kutub. Bila sikat-arang dihubungkan pada satu sumber arus-searah diluar dengan tegangan V, maka satu arus Imasuk terminal kumparan rotor dibawah kutub U dan keluar dari terminal dibawah kutub S.
Dengan adanya fluks stator dan arus rotor akan menghasilkan satu gaya F bekerja pada kumparan yang dikenal sebagai gaya Lorentz. Arah F diperlihatkan seperti pada Gambar 1 Gaya ini menghasilkan torsi yang memutar rotor kearah berlawanan dengan jarum-jam. Kumparan yang membawa arus bergerak menjauhi sikat-arang dan dilepas dari sumber suplai luar.
Kumparan berikutnya bergerak dibawah sikat-arang dan membawa arus I. Hal demikian memproduksi satu gaya
F secara terus-menerus (kontinyu) dan rotor berputar secara kontinyu. Perhatikan bahwa fungsi dari komutator dan sikat-arang adalah penyalaan (to switch) secara mekanik.
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS 2 Gambar 1 Bagian-bagian Motor DC
a. Model Matematika Motor DC [13]
Pengaturan kecepatan pada motor DC dengan penguatan medan dengan menggunakan magnet permanen ini dapat dilakukan dengan mengatur tegangan pada kumparan jangkar. Karena medan magnet yang dihasilkan berasal dari magnet permanen maka kuat medan magnet tersebut bernilai tetap. Skema rangkaian motor sederhana dapat dilihat pada Gambar 2.
Gambar 2 Diagram Skematik Motor DC
Untuk keperluan pengaturan kecepatan putar motor DC, maka Diagram blok total sistem, sebagai berikut.
Gambar 3 Diagram Blok Total Sistem
Fungsi alih sistem motor DC sebagai berikut:
Pada umumnya induktansi dari kumparan jangkar motor sangat kecil sekali harganya sehingga dapat diabaikan, sehingga persamaan (1) menjadi persamaan (2) :
Dengan menyatakan,
Maka fungsi alih antara kecepatan motor dengan tegangan masukkan dapat dinyatakan sebagai :
Sehingga fungsi alih untuk motor DC dapat disederhanakan menjadi fungsi alih orde satu dengan menyatakan konstanta penguat motor DC dan adalah konstanta waktu motor DC.
b. Kontroler Optimal Linear Quadratic Regulator
(LQR) [9]
Linear Quadratic Regulator adalah suatu kontrol optimal pada sistem linear dengan kriteria kuadratik untuk menyelesaikan permasalahan regulator (Regulator Problem). Suatu sistem linear :
Bu Ax x (4) Cx y (5) Dimana: 1 * n
x
: State Sistem n mu
* : Stateinput 1 * ly
: Stateoutput A : Matriks Sistem An*n B : Matriks Input Bn*m C : Matriks Output Cl*nDengan meminimisasi energi (cost function/quadratic function) melalui indeks performansi dalam interval [t0 , ∞] adalah : 0 ) ( 2 1 t dt Ru T u Qx T x J (6) Dimana: t0 = waktu awal ∞ = waktu akhir
Q = matriks semidefinit positif R = matriks definit positif
Persoalan regulator dapat diselesaikan dengan menyelesaikan Persamaan Riccati sebagai berikut :
(7)
Di mana pemilihan pemberat Q dan R berpedoman pada : 1. Semakin besar harga Q, semakin memperbesar harga
elemen penguatan K sehingga mempercepat sistem untuk mencapai keadaan tunak (intermediate state cost function).
2. Semakin besar harga R, maka akan memperkecil harga penguatan K dan memperlambat keadaan tunak (energy drive).
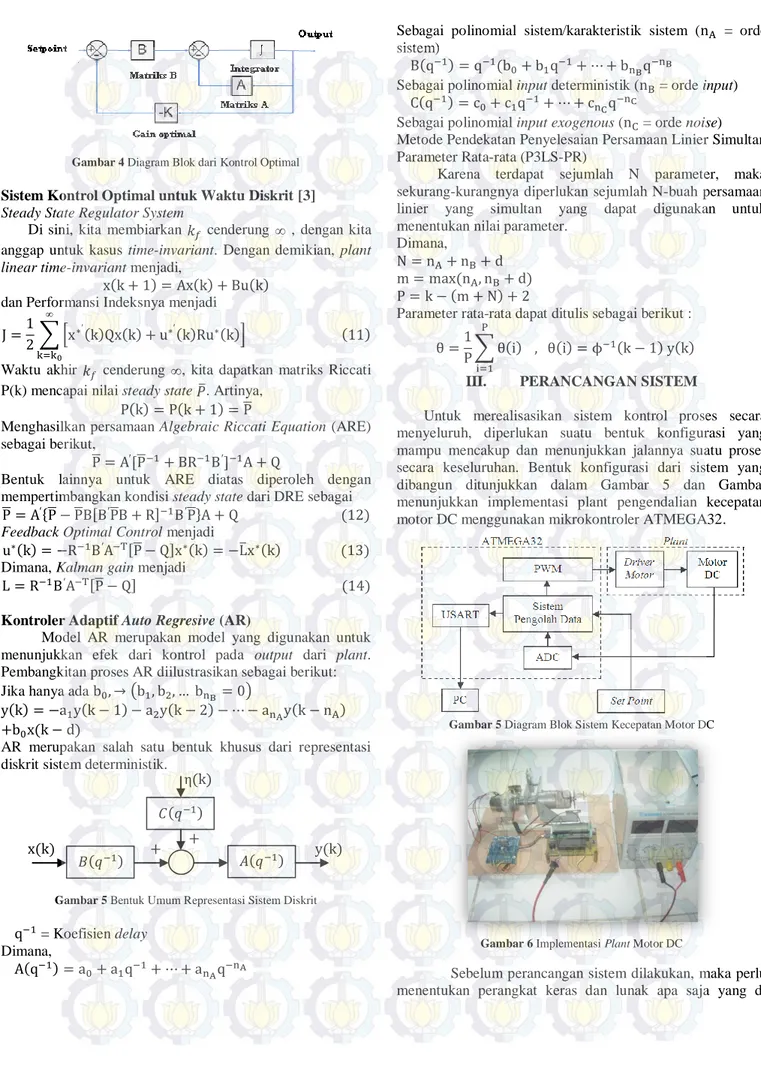
Gambar 4 menunjukkan diagram blok dari kontrol optimal. Diusahakan harga dari penyelesaian persamaan Riccati
merupakan matrik yang bernilai kecil. Di mana :
(8)
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS 3 Gambar 4 Diagram Blok dari Kontrol Optimal
Sistem Kontrol Optimal untuk Waktu Diskrit [3]
Steady State Regulator System
Di sini, kita membiarkan cenderung , dengan kita anggap untuk kasus time-invariant. Dengan demikian, plant linear time-invariant menjadi,
dan Performansi Indeksnya menjadi
∞
Waktu akhir cenderung , kita dapatkan matriks Riccati P(k) mencapai nilai steady state . Artinya,
Menghasilkan persamaan Algebraic Riccati Equation (ARE) sebagai berikut,
Bentuk lainnya untuk ARE diatas diperoleh dengan mempertimbangkan kondisi steady state dari DRE sebagai
Feedback Optimal Control menjadi
Dimana, Kalman gain menjadi
Kontroler Adaptif Auto Regresive (AR)
Model AR merupakan model yang digunakan untuk menunjukkan efek dari kontrol pada output dari plant. Pembangkitan proses AR diilustrasikan sebagai berikut: Jika hanya ada
AR merupakan salah satu bentuk khusus dari representasi diskrit sistem deterministik.
Gambar 5 Bentuk Umum Representasi Sistem Diskrit
= Koefisien delay
Dimana,
Sebagai polinomial sistem/karakteristik sistem ( = orde sistem)
Sebagai polinomial input deterministik ( = orde input)
Sebagai polinomial input exogenous ( = orde noise) Metode Pendekatan Penyelesaian Persamaan Linier Simultan Parameter Rata-rata (P3LS-PR)
Karena terdapat sejumlah N parameter, maka sekurang-kurangnya diperlukan sejumlah N-buah persamaan linier yang simultan yang dapat digunakan untuk menentukan nilai parameter.
Dimana,
Parameter rata-rata dapat ditulis sebagai berikut :
III. PERANCANGAN SISTEM
Untuk merealisasikan sistem kontrol proses secara menyeluruh, diperlukan suatu bentuk konfigurasi yang mampu mencakup dan menunjukkan jalannya suatu proses secara keseluruhan. Bentuk konfigurasi dari sistem yang dibangun ditunjukkan dalam Gambar 5 dan Gambar menunjukkan implementasi plant pengendalian kecepatan motor DC menggunakan mikrokontroler ATMEGA32.
Gambar 5 Diagram Blok Sistem Kecepatan Motor DC
Gambar 6 Implementasi Plant Motor DC
Sebelum perancangan sistem dilakukan, maka perlu menentukan perangkat keras dan lunak apa saja yang di η(k)
+ + y(k)
x(k)
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS 4
butuhkan dalam sistem. Adapun perangkat keras dan perangkat lunak yang akan di butuhkan pada perancangan sistem.
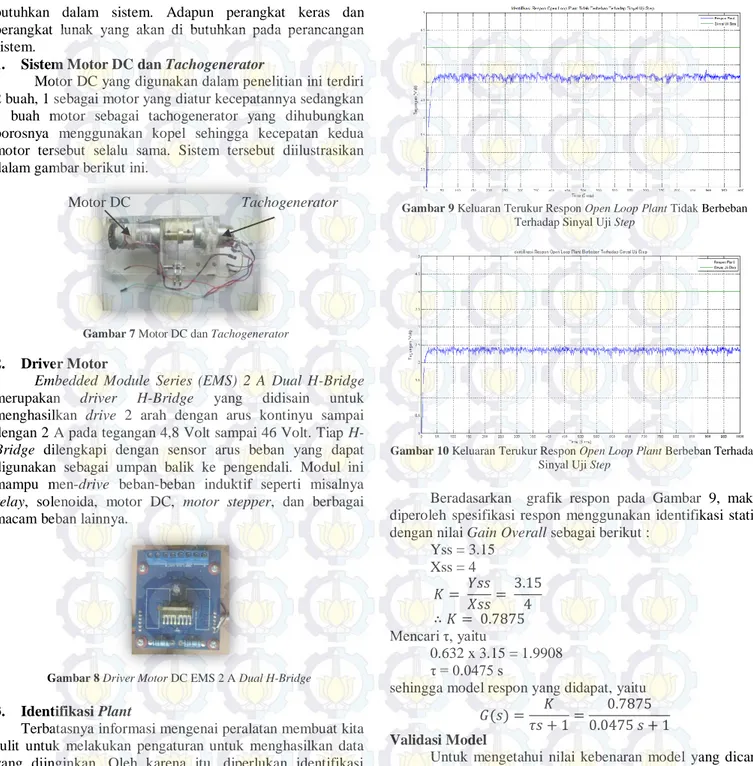
1. Sistem Motor DC dan Tachogenerator
Motor DC yang digunakan dalam penelitian ini terdiri 2 buah, 1 sebagai motor yang diatur kecepatannya sedangkan 1 buah motor sebagai tachogenerator yang dihubungkan porosnya menggunakan kopel sehingga kecepatan kedua motor tersebut selalu sama. Sistem tersebut diilustrasikan dalam gambar berikut ini.
Gambar 7 Motor DC dan Tachogenerator
2. Driver Motor
Embedded Module Series (EMS) 2 A Dual H-Bridge
merupakan driver H-Bridge yang didisain untuk menghasilkan drive 2 arah dengan arus kontinyu sampai dengan 2 A pada tegangan 4,8 Volt sampai 46 Volt. Tiap H-Bridge dilengkapi dengan sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini mampu men-drive beban-beban induktif seperti misalnya
relay, solenoida, motor DC, motor stepper, dan berbagai macam beban lainnya.
Gambar 8Driver Motor DC EMS 2 A Dual H-Bridge
3. Identifikasi Plant
Terbatasnya informasi mengenai peralatan membuat kita sulit untuk melakukan pengaturan untuk menghasilkan data yang diinginkan. Oleh karena itu, diperlukan identifikasi tentang sistem tersebut untuk memperoleh model matematis dari plant, sehingga akan diketahui gejala atau karakteristiknya. Proses identifikasi dilakukan secara open loop dengan set point 4 Volt. Selanjutnya respon yang didapat akan direpresentasikan dalam bentuk grafik, sehingga memungkinkan untuk dianalisa dan merancang kontroler yang sesuai dengan sistem tersebut.
.
Gambar 9 Keluaran Terukur Respon Open Loop Plant Tidak Berbeban Terhadap Sinyal Uji Step
Gambar 10 Keluaran Terukur Respon Open Loop Plant Berbeban Terhadap Sinyal Uji Step
Beradasarkan grafik respon pada Gambar 9, maka diperoleh spesifikasi respon menggunakan identifikasi statis dengan nilai Gain Overall sebagai berikut :
Yss = 3.15 Xss = 4 Mencari τ, yaitu 0.632 x 3.15 = 1.9908 τ = 0.0475 s
sehingga model respon yang didapat, yaitu
Validasi Model
Untuk mengetahui nilai kebenaran model yang dicari maka percobaan dilakukan sebanyak 8 kali. Kemudian dicari nilai Mean Square Error (MSE), di mana semakin kecil nilai
MSE maka semakin baik model yang kita buat.
Mean Square Error ( MSE)
Mean Square Error =
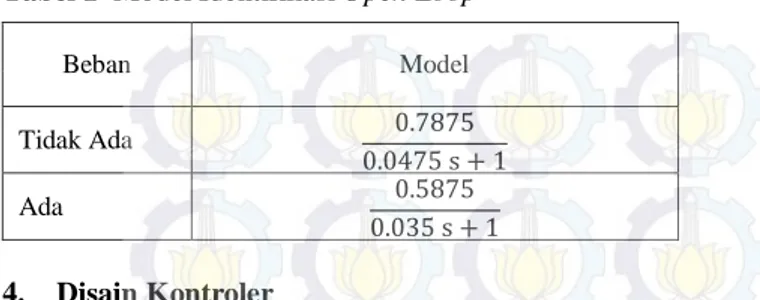
Langkah yang sama dilakukan untuk berbeban. Pemilihan model yang dipilih adalah model dengan nilai
MSE terkecil dengan demikian model plant untuk masing-masing keadaan beban yang digunakan diperlihatkan pada Tabel 1.
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS 5
Tabel 1 Model Identifikasi Open Loop
Beban Model Tidak Ada Ada 4. Disain Kontroler
Pada penelitian ini kontroler optimal LQR digunakan untuk mendapatkan sistem yang stabil, yaitu mendekati set point, matriks pembobot Q dan R didapat dengan melakukan
tuning (trial and error), sehingga diharapkan matriks pembobot yang didapat, mampu melakukan proses optimasi dan penambahan kontroler adaptif disini adalah untuk melakukan proses identifikasi online, diharapkan plant akan mempertahankan keadaanya pada keadaan steady state. Mengacu dari identifikasi yang dilakukan, diketahui bahwa
plant merupakan orde satu dengan input U(s), output Y(s) dan fungsi alih plant, di mana:
Persamaan diatas merupakan bentuk waktu kontinyu, maka perlu diubah dalam waktu diskrit di MATLAB terlebih dahulu karena proses selanjutnya berada di mikrokontoler. Maka persamaan diatas menjadi
Dengan Sampling time (Ts) = Tr / 10 = 0.2835
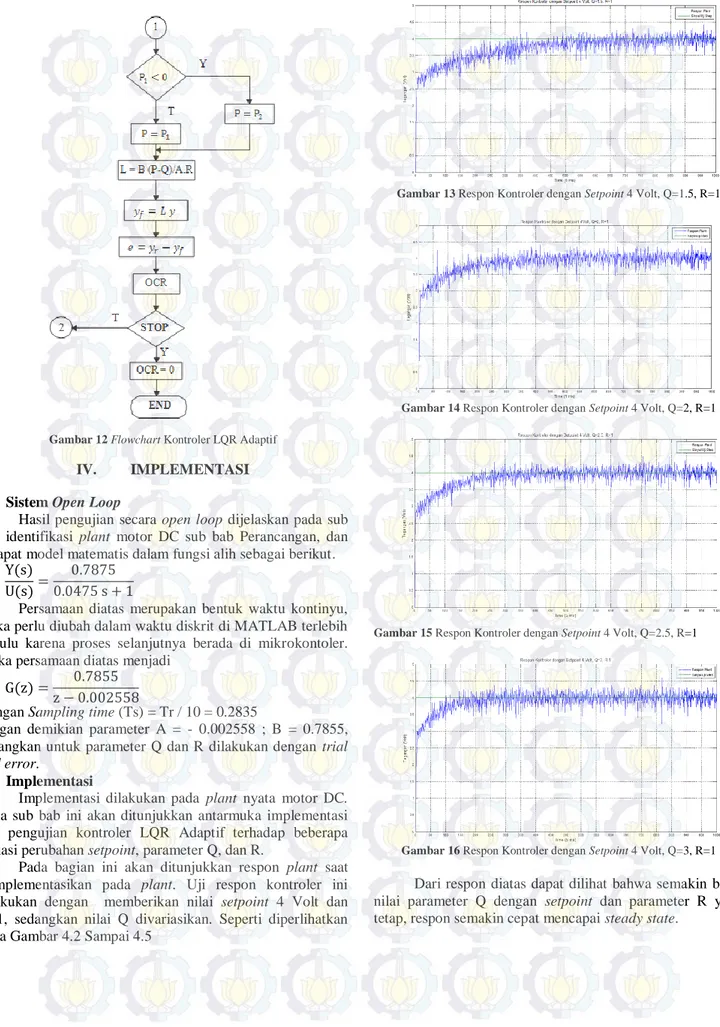
Gambar 11 Diagram Blok Kontroler LQR Adaptif
Berikut adalah flowchart dari pengendalian kecepatan motor DC menggunakan kontroler LQR Adaptif.
Untuk keadaan awal dilakukan identifiaksi offline, guna mendapatkan nilai parameter A dan B dari model matematika
plant dalam waktu diskrit, parameter Q dan R juga dimasukkan untuk mendapatkan nilai P, dimana nilai P bernilai semi definit positif, proses disini melibatkan kontroler LQR. Nilai P ini untuk menghitung sinyal kontrol u, apabila nilainya belum sesuai kriteria (mencapai setpoint) maka kontroler adapatif bekerja untuk melalukan identifikasi
online, guna mendapat nilai A dan B yang baru, proses terjadi secara terus menerus sampai respon yang bekerja pada daerah steady state mendekati sunyal uji step yang diharapkan.
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS 6 Gambar 12Flowchart Kontroler LQR Adaptif
IV. IMPLEMENTASI 1. Sistem Open Loop
Hasil pengujian secara open loop dijelaskan pada sub bab identifikasi plant motor DC sub bab Perancangan, dan didapat model matematis dalam fungsi alih sebagai berikut.
Persamaan diatas merupakan bentuk waktu kontinyu, maka perlu diubah dalam waktu diskrit di MATLAB terlebih dahulu karena proses selanjutnya berada di mikrokontoler. Maka persamaan diatas menjadi
Dengan Sampling time (Ts) = Tr / 10 = 0.2835
dengan demikian parameter A = - 0.002558 ; B = 0.7855, sedangkan untuk parameter Q dan R dilakukan dengan trial and error.
2. Implementasi
Implementasi dilakukan pada plant nyata motor DC.
Pada sub bab ini akan ditunjukkan antarmuka implementasi dan pengujian kontroler LQR Adaptif terhadap beberapa variasi perubahan setpoint, parameter Q, dan R.
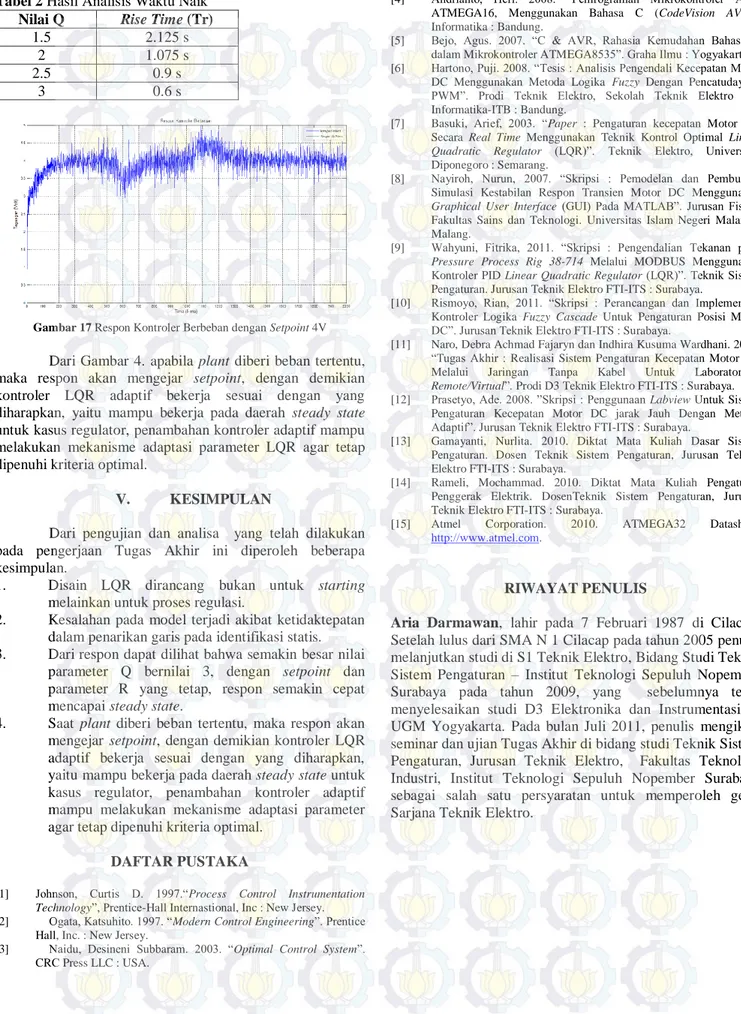
Pada bagian ini akan ditunjukkan respon plant saat diimplementasikan pada plant. Uji respon kontroler ini dilakukan dengan memberikan nilai setpoint 4 Volt dan R=1, sedangkan nilai Q divariasikan. Seperti diperlihatkan pada Gambar 4.2 Sampai 4.5
Gambar 13 Respon Kontroler dengan Setpoint 4 Volt, Q=1.5, R=1
Gambar 14 Respon Kontroler dengan Setpoint 4 Volt, Q=2, R=1
Gambar 15 Respon Kontroler dengan Setpoint 4 Volt, Q=2.5, R=1
Gambar 16 Respon Kontroler dengan Setpoint 4 Volt, Q=3, R=1
Dari respon diatas dapat dilihat bahwa semakin besar nilai parameter Q dengan setpoint dan parameter R yang tetap, respon semakin cepat mencapai steady state.
Proceeding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS 7
Tabel 2 Hasil Analisis Waktu Naik
Nilai Q Rise Time (Tr)
1.5 2.125 s
2 1.075 s
2.5 0.9 s
3 0.6 s
Gambar 17 Respon Kontroler Berbeban dengan Setpoint 4V
Dari Gambar 4. apabila plant diberi beban tertentu, maka respon akan mengejar setpoint, dengan demikian kontroler LQR adaptif bekerja sesuai dengan yang diharapkan, yaitu mampu bekerja pada daerah steady state
untuk kasus regulator, penambahan kontroler adaptif mampu melakukan mekanisme adaptasi parameter LQR agar tetap dipenuhi kriteria optimal.
V. KESIMPULAN
Dari pengujian dan analisa yang telah dilakukan pada pengerjaan Tugas Akhir ini diperoleh beberapa kesimpulan.
1. Disain LQR dirancang bukan untuk starting
melainkan untuk proses regulasi.
2. Kesalahan pada model terjadi akibat ketidaktepatan dalam penarikan garis pada identifikasi statis. 3. Dari respon dapat dilihat bahwa semakin besar nilai
parameter Q bernilai 3, dengan setpoint dan parameter R yang tetap, respon semakin cepat mencapai steady state.
4. Saat plant diberi beban tertentu, maka respon akan mengejar setpoint, dengan demikian kontroler LQR adaptif bekerja sesuai dengan yang diharapkan, yaitu mampu bekerja pada daerah steady state untuk kasus regulator, penambahan kontroler adaptif mampu melakukan mekanisme adaptasi parameter agar tetap dipenuhi kriteria optimal.
DAFTAR PUSTAKA
[1] Johnson, Curtis D. 1997.“Process Control Instrumentation Technology”, Prentice-Hall Internastional, Inc : New Jersey.
[2] Ogata, Katsuhito. 1997. “Modern Control Engineering”. Prentice Hall, Inc. : New Jersey.
[3] Naidu, Desineni Subbaram. 2003. “Optimal Control System”.
CRC Press LLC : USA.
[4] Andrianto, Heri. 2008. “Pemrograman Mikrokontroler AVR ATMEGA16, Menggunakan Bahasa C (CodeVision AVR)”. Informatika : Bandung.
[5] Bejo, Agus. 2007. “C & AVR, Rahasia Kemudahan Bahasa C dalam Mikrokontroler ATMEGA8535”. Graha Ilmu : Yogyakarta. [6] Hartono, Puji. 2008. “Tesis : Analisis Pengendali Kecepatan Motor
DC Menggunakan Metoda Logika Fuzzy Dengan Pencatudayaan PWM”. Prodi Teknik Elektro, Sekolah Teknik Elektro dan Informatika-ITB : Bandung.
[7] Basuki, Arief, 2003. “Paper : Pengaturan kecepatan Motor DC Secara Real Time Menggunakan Teknik Kontrol Optimal Linear Quadratic Regulator (LQR)”. Teknik Elektro, Universitas Diponegoro : Semarang.
[8] Nayiroh, Nurun, 2007. “Skripsi : Pemodelan dan Pembuatan Simulasi Kestabilan Respon Transien Motor DC Menggunakan
Graphical User Interface (GUI) Pada MATLAB”. Jurusan Fisika, Fakultas Sains dan Teknologi. Universitas Islam Negeri Malang : Malang.
[9] Wahyuni, Fitrika, 2011. “Skripsi : Pengendalian Tekanan pada
Pressure Process Rig 38-714 Melalui MODBUS Menggunakan Kontroler PID Linear Quadratic Regulator (LQR)”. Teknik Sistem Pengaturan. Jurusan Teknik Elektro FTI-ITS : Surabaya.
[10] Rismoyo, Rian, 2011. “Skripsi : Perancangan dan Implementasi Kontroler Logika Fuzzy Cascade Untuk Pengaturan Posisi Motor DC”. Jurusan Teknik Elektro FTI-ITS : Surabaya.
[11] Naro, Debra Achmad Fajaryn dan Indhira Kusuma Wardhani. 2009. “Tugas Akhir : Realisasi Sistem Pengaturan Kecepatan Motor DC Melalui Jaringan Tanpa Kabel Untuk Laboratorium
Remote/Virtual”. Prodi D3 Teknik Elektro FTI-ITS : Surabaya. [12] Prasetyo, Ade. 2008. ”Skripsi : Penggunaan Labview Untuk Sistem
Pengaturan Kecepatan Motor DC jarak Jauh Dengan Metode Adaptif”. Jurusan Teknik Elektro FTI-ITS : Surabaya.
[13] Gamayanti, Nurlita. 2010. Diktat Mata Kuliah Dasar Sistem Pengaturan. Dosen Teknik Sistem Pengaturan, Jurusan Teknik Elektro FTI-ITS : Surabaya.
[14] Rameli, Mochammad. 2010. Diktat Mata Kuliah Pengaturan Penggerak Elektrik. DosenTeknik Sistem Pengaturan, Jurusan Teknik Elektro FTI-ITS : Surabaya.
[15] Atmel Corporation. 2010. ATMEGA32 Datasheet.
http://www.atmel.com.
RIWAYAT PENULIS
Aria Darmawan, lahir pada 7 Februari 1987 di Cilacap. Setelah lulus dari SMA N 1 Cilacap pada tahun 2005 penulis melanjutkan studi di S1 Teknik Elektro, Bidang Studi Teknik Sistem Pengaturan – Institut Teknologi Sepuluh Nopember Surabaya pada tahun 2009, yang sebelumnya telah menyelesaikan studi D3 Elektronika dan Instrumentasi di UGM Yogyakarta. Pada bulan Juli 2011, penulis mengikuti seminar dan ujian Tugas Akhir di bidang studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya sebagai salah satu persyaratan untuk memperoleh gelar Sarjana Teknik Elektro.