DESAI N SI STEM KENDALI MELALUI
TANGGAPAN FREKUENSI
Ì
Pendahuluan
Ì
Tahap Awal Desain
Ì
Kompensasi Lead
Ì
Kompensasi Lag
Ì
Kompensasi Lag-Lead
Ì
Kontroler P, PI , PD dan PI D
Ì
Hubungan antara Kompensator Lead,
Lag & Lag-Lead dengan Kontroler PD,
*
*
PENDAHULUAN
♦
Dalam desain sistem kendali (secara konvensional), unjuk kerja respons transient umumnya merupakan hal yang terpenting .♦
Spesifikasi transient dinyatakan (secara tak langsung) dalam:⇒
phase margin (faktor redaman)⇒
gain margin (batas kestabilan)⇒ lebar bidang frekuensi (kecepatan transient
)⇒
simpangan puncak resonansi (faktor redaman)⇒
frekuensi resonansi⇒
frekuensi gain crossover⇒ konstanta-konstanta error statik (ketelitian
steady state)
♦
Alat bantu perancangan: Bode Plot (lebih praktis) , Nyquist, dst.♦
Terbatas pada SI SO, linear, invarian waktu.•
Spesifikasi dicoba dipenuhi melalui gain adjustment dengan cara coba-coba.•
Tak selalu berhasil mengingat plant tak selalu dapat diubah.♦
Kompensator Lead, Lag dan Lag-lead Lead: fasa output mendahului inputLag : fasa output terbelakang dari input
Lag-lead : phase lag terjadi pada daerah frekuensi rendah,
phase lead terjadi pada daerah frekuensi tinggi.
♦
Karakteristik respons transient harus di cek lagi setelah perancangan selesai.♦
Perancangan dengan pendekatan Diagram
Bode:
1. Atur penguatan lup terbuka (untuk memenuhi spek akurasi steady state).
2. Gambar diagram Bode sistem semula.
3. Tentukan apakah gain & phase margins memenuhi spek.
4. Bila tidak, tentukan kompensator yang sesuai agar diperoleh respons frekuensi yang sesuai.
♦
I nformasi pada Diagram Bode:
•
Daerah frekuensi rendah (ω
< <ω
gco): menggambarkan karakteristik steady state sistem.•
Daerah frekuensi tengah (frekuensi sekitar titik -1+ j0 pada polar plot): menggambarkan kestabilan relatif.•
Respons Frekuensi (Loop Terbuka) I deal:
•
Gain pada daerah frekuensi rendah harus cukup tinggi.•
Slope kurva log magnitude (Bode Plot) dekat fgco : -20db/ decade dan memanjang yang memadai agar diperoleh phase margin yang memadai.*
KOMPENSASI LEAD
•
Tujuan Kompensasi Lead: Mengubah kurva respons frekuensi agar diperoleh sudut phase lead yang cukup untuk mengkompensasi phase lag yang disebabkan oleh komponen-komponen sistem.•
Asumsi:•
Spesifikasi unjuk kerja diberikan dalam phase & gain margins, konstanta error statik dst.•
Respons transient tak memuaskan.•
Kompensasi dapat dicapai dengan penambahan kompensator seri.•
Karakteristik Kompensator LeadE s E s R C R C s R C s R C K Ts Ts K s T s T o i c c ( ) ( ) = + + = + + = + + 4 1 3 2 1 1 2 2 1 1 1 1 1 1 α α α dengan: T = R1C1; αT= R2C2; Kc = R4C1/ R3C2;
•
Untuk Domain Frekuensi:G
j
K
j T
j
T
c
(
ω
)
cα
;
(
)
ω
ωα
α
=
+
+
< <
1
1
0
1
•
Polar Plotnya (untuk Kc= 1)•
Bode Plotnya (untuk Kc= 1): HPFPerhatikan bahwa :
ω
m = frekuensi tengah geometri antara 2 frekuensi sudut, sehingga:sinφ
α α
α α m =
−
+ = −+
1 2 1
2
] T 1 log T 1 log [ 2 1 log m α
ω = + atau
ω
α
m
T
=
1
•
Prosedur Perancangan:
1. Anggap kompensator lead:G s K Ts
Ts K
s T
s T
c( ) = c c ( )
+ + =
+
+ < <
α α α α 1 1 1
1 0 1
atau:
G s K Ts
Ts dengan K K
c( ) = c
+
+ =
1 1
α α
Sehingga OLTF sistem terkompensasi:
G s G s K Ts
Ts G s G s G s
c( ) ( ) ( ) c ( ) ( )
| = + + = 1 1 1 α dengan:
G s
KG s
G s
Ts
Ts
c 11
1
( )
( )
( )
|=
=
+
+
α
Tentukan K melalui konstanta error statik yang diinginkan.
2. Gambar diagram Bode G1(j
ω
) dengan K yang diperoleh dari butir 1.Tentukan phase margin.
dicapai melalui gain adjustment.
3. Hitung sudut phase lead
φ
yang perlu ditambahkan pada sistem.4. Hitung faktor redaman
α
melalui rumus:sin
φ
α
α
m
= −
+
1
1
Hitung frekuensi gain crossover baru pada diagram Bode sistem G1(j
ω
) dengan mengingat bahwa frekuensi tsb terjadi pada:magnitude = −20log 1
α
Hitung T melalui rumus:
ω
α
m
T
= 1 ;
ωm
= frekuensi gain crossover.5. Tentukan kedua frekuensi sudut kompensator sbb:
zero
T
pole
T
:
ω
;
:
ω
α
=
1
=
1
6. Tentukan penguatan kompensator Kc melalui:
K
=
K
cα
CONTOH SOAL
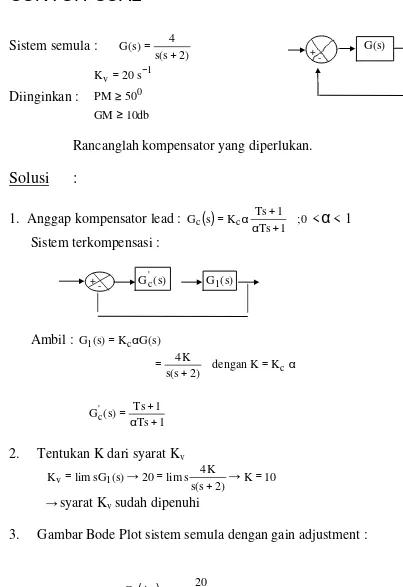
Sistem semula : G s s s ( ) ( ) = + 4 2 Diinginkan : K s PM GM db v = ≥ ≥ − 20 50 10 1 0
Rancanglah kompensator yang diperlukan.
Solusi
:
1. Anggap kompensator lead : G s
( )
K Ts Ts c = cαα ++11 ;0 <α< 1
Sistem terkompensasi :
Ambil : G s1( )=KcαG s( )
=
+ =
4 2 K
s s( ) dengan K Kcα G s Ts
Ts c ' ( )= + + 1 1 α
2. Tentukan K dari syarat Kv
K sG s s K
s s K v =lim ( )→ =lim + → =
( )
1 20 4
2 10
→syarat Kv sudah dipenuhi
3. Gambar Bode Plot sistem semula dengan gain adjustment :
( )
G j j j 1 20 2 1 ω ω ω = + G(s)G sc' ( ) G s1( ) +
-Hitung ωgco :→ terjadi pd g1
( )
jω =1 20 2 1 1 2 ω ω + =Pers : 400=ω2
(
0 25, ω2 + ⇒1)
ωgco =6 17, rad s/( )
Lead r kompensato perlu , terpenuhi tak PM ~ 18 ) ( 180 162 2 17 , 6 tan 90 0 17 , 6 1 0 0 1 0 17 , 6 1 ⇒ = = − = − = − − = ∠ = − = GM j G PM j G ω ω ω ω4. Phase lead yang perlu dikontribusi oleh kompensator :
φm =500 −180 +50 = 370
offset : perlu untuk kompensasi pergeseran ωgcokekanan akibat penambahan kompensator lead.
sin φ α ,
α α φ
m = −1+ ⇒ = untuk m =
1 0 24 38
0
5. Tentukan pole dan zero kompensator :
zero
T pole T
= 1 ; = 1 α
Ingat φm terjadi pada tengah-tengah kedua frekuensi diatas atau pada
ω α = 1
T
Besarnya perubahan kurva magnitude pada ω
α = 1
T akibat
G s Ts
untuk α
α
=0 24 ⇒ 1 = 1 =
0 49 6 2 ,
, , db
Sehingga untuk mengkompensasi kenaikan gain 6,2 db, maka
( )
G j1 ω = −6 2, db, atau:
20 20 2 1 6 2 2 log , ω ω +
= − db
Persamaan : 40 8, 2 =0 25, ω4+ω2⇒ωgeo' =8 92, rad s/ ≅9rad s/
Sehingga frekuensi gain cross over baru
ω
α
gco rad s
T T
' =9 / = 1 ⇒ =0 227, ,
Diperoleh :
G s s
s c( ) ,
,
= +
+
100 227 1 0 054 1
6 Menentukan Kc = K = =
α
10
0 24, 41 7,
Catatan :
G s Ts Ts
s s
G s G s s s
c( ) ,
, ( ) ( ) ( ) 10 1 1
0 227 1 0 054 1
10 40 1 1 = + + = + + = = + α
7. Pengecekan ulang setelah kompensasi : OLTF Sistem terkompensasi :
(
)
(
)
G s G s s
s s s
c( ) ( )
, ( ) ,
= +
+ +
40 0 227 1 2 0 054 1
sudut fasa pada frekuensi gain crosssover 8,92 rad/s
G s G sc
s j
( ) ( )
=
tan tan , tan ,
, , , ,
− − − − − − =
− − − = −
1 0 1 1
0 0 0 0 0
2 1 90
8 92 2
0 48 1 63 4 90 77 4 25 6 129 6
• PM = 1800 - 129,60 = 50,40
⇒
terpenuhi• GM = ~
⇒
terpenuhi• Terjadi kenaikan frekuensi gain crossover 6,17 rad/s
⇒
8,92 rad/s : berarti kenaikan bandwidth (kenaikan kecepatan respons)*
KOMPENSASI LAG
•
Tujuan:
Meredam daerah frekuensi tinggi agar diperoleh cukup phase margin.•
Karakteristik Kompensator LagE
s
E s
K
Ts
Ts
K
s
T
s
T
oi
c c
( )
( )
=
;
+
+
=
+
+
>
β
β
β
β
1
1
1
1
1
dengan:
T = R1C1;
β
T= R2C2;β
= R2C2/ R1C1 > 1•
Bode Plotnya (untuk Kc= .1; β= 10)Prosedur:
1. Anggap kompensator lag:
G s K Ts
Ts K s
T
s T
c( ) = c c ;
+ + = + + > β β β β 1 1 1 1 1
atau:
G s
K
Ts
Ts
dengan
K
K
c
( )
=
c+
+
=
1
1
β
β
Sehingga OLTF sistem terkompensasi:
G s G s K Ts
Ts G s G s G s
c( ) ( ) ( ) c ( ) ( )
| = + + = 1 1 1 β dengan:
1
1
)
(
)
(
)
(
| 1+
+
=
=
Ts
Ts
s
G
s
KG
s
G
cβ
Tentukan K melalui konstanta error statik yang diinginkan.
2. Gambar diagram Bode G1(j
ω) dengan K yang diperoleh
dari butir 1. Bila gain & phase margins tak dipenuhi, tentukan frekuensi gain crossover baru sbb:f*gco= frekuensi pada sudut fasa sistem G1(j
ω)
bernilai = -180o + spek phase margin + φoffset. dengan φoffset.= 5o sampai 12o untuk3. Pole dan zero kompensator harus terletak jauh lebih rendah dari pada frekuensi gain crossover baru untuk menghindari efek detrimental.
Pilih frekuensi sudut ω = 1
T lebih rendah 1 octave
sampai 1 decade dari f*gco. (Hindari konstanta waktu kompensator terlalu besar).
4. Tentukan redaman yang diperlukan untuk membawa kurva magnitude turun 0 db pada f*gco.
β
dapat ditentukan dengan mengingat : redaman = -20 logβ.
Tentukan frekuensi sudut kedua:
ω
β
=
1
T
5. Tentukan penguatan kompensator Kc melalui:
*
KOMPENSASI LAG-LEAD
•
Kompensator Lead:
- memperbesar bandwidth: - mempercepat respons,
- memperkecil % Mp pada respons step.
•
Kompensator Lag:
-
memperbesar gain pada frekuensi rendah(akurasi steady state membaik),
- memperlambat respons (bandwidth mengecil).
•
Kompensator Lag- Lead:
-
memperbesar bandwidth dan••
Karakteristik Kompensator Lag- Lead
G s K
s T s T s T s T lead lag
c( ) = c ; ;
+ + + + > > ⇓ ⇓ 1 1
1 1 1
1 1 2 2 γ β γ β
• Polar Plotnya (K
c= 1; β=γ)
dengan:
ω
1 1 21
=
T T
•
Prosedur Perancangan:
Kombinasi prosedur Perancangan untuk Kompensasi Lead dan Kompensasi Lag.
Anggap OLTF sistem semula G(s) dan kompensator
G s
K
T s
Kontroler PI dan Kompensator Lag:
•
Kontroler PI :
G s K
T s
K T
T s s
c p
i
p i
i
( ) = +
= +
1 1 1
•
Kompensator Lag:
G s K Ts
Ts
c( ) = c ;
+
+ >
β
β β
1
1 1
•
Kontroler PI adalah kompensator Lag, dengan zero s= -1/ Ti dan pole pada s= 0 (penguatan∞
pada frekuensi 0)•
Kontroler PI memperbaiki karakteristik respons steadystate.
•
Kontroler PI menaikkan tipe sistem terkompensasi dengan 1, sehingga sistem tsb kurang stabil atau bahkan tak stabil.Kontroler PD dan Kompensator Lead
Kontroler PD:
G s
c( )
=
K
p(
1
+
T s
d)
Kompensator Lead:
G s
K
Ts
Ts
c
( )
=
c(
)
+
+
< <
α
α
α
1
1
0
1
•
Kontroler PD = versi sederhana dari kompensator lead.•
Kp ditentukan dari spesifikasi steady state•
Frekuensi sudut 1/ Td dipilih agar phase lead terjadi sekitarω
gco.Bila phase margin dinaikkan, maka magnitude kontroler naik terus untuk frekuensi tinggi
ω
> 1/ Td, sehingga memperkuat derau pada frekuensi tinggi.•
Kompensator Lead dapat menaikkan phase lead, tetapi kenaikan magnitude pada frekuensi tinggi sangat kecil dibandingkan dengan kontroler PD.•
Realisasi dengan rangkaian elektronik dapat menyebabkan masalah derau, meskipun tidak ada masalah bila direalisasikan dengan elemen-elemen hidraulik dan pneumatik.Kontroler PI D dan Kompensator Lag-Lead:
•
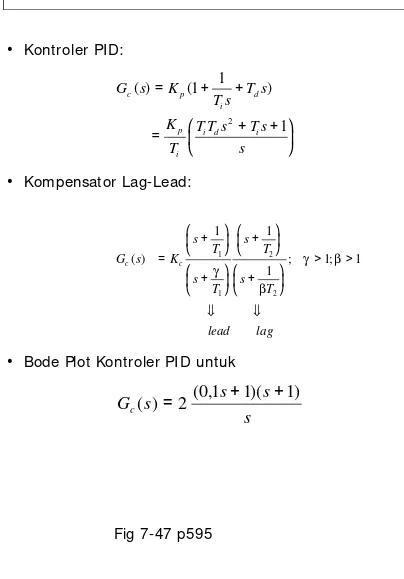
Kontroler PI D:G s K
T s T s
K T
T T s T s
s c p i d p i
i d i
( ) = ( + + ) = + + 1 1 1 2
•
Kompensator Lag-Lead:G s K
s T s T s T s T lead lag
c( ) = c ; ; + + + + > > ⇓ ⇓ 1 1
1 1 1
1 1 2 2 γ β γ β
•
Bode Plot Kontroler PI D untukG s
s
s
s
c( )
( ,
)(
)
=
2
0 1
+
1
+
1
•
Kontroler PI D adalah Kompensator Lag-Lead.