BAB VIII
DESAIN SISTEM KENDALI
MELALUI TANGGAPAN FREKUENSI
Dalam bab ini akan diuraikan langkah-langkah perancangan dan kompensasi dari sistem kendali linier masukan-tunggal keluaran-tunggal yang tidak berubah dengan waktu, dengan pendekatan tanggapan frekuensi. Seperti pada bab 6, pembahasan teknik kompensasi pada bab ini akan dibatasi pada kompensasi fasa maju, kompensasi fasa mundur, dan kompensasi fasa mundur-maju. Disamping itu, kompensator dianggap diletakkan secara seri dengan plant nya.
8.1 Pendahuluan
Dalam sistem kendali, kinerja tanggapan peralihan pada umumnya lebih penting.
Pada pendekatan tanggapan frekuensi, kinerja tanggapan frekuensi ditentukan secara tidak langsung. Yaitu melalui bentuk-bentuk margin fasa, margin penguatan, resonansi besaran puncak (memberikan perkiraaan kasar dai redaman sistem), frekuensi gain crossover, frekuensi resonansi, lebar pita (memberikan perkiraan kasar dari kecepatan tanggapan peralihan) dan konstanta galat kecepatan statik (memberikan ketelitian keadaan tunak). Meskipun korelasi antara tanggapan peralihan dan tanggapan frekuensi tidak langsung, spesifikasi kawasan frekuensi mudah dipahami dengan pendekatan diagram Bode.
Setelah lup terbuka dirancang dengan metoda tanggapan frekuensi, pole dan zero lup tertutup dapat ditentukan. Karakteristik tanggapan frekuensi harus diperiksa untuk melihat apakah sistem yang dirancang memenuhi persyaratan kawasan waktu.
Jika tidak memenuhi harus dimodifikasi dan dianalisa ulang sampai diperoleh suatu hasil yang memuaskan.
Perancangan dalam kawasan frekuensi adalah sederhana dan jelas. Diagram tanggapan frekuensi secara nyata menunjukkan cara sistem yang akan dimodifikasi, meskipun prediksi secara pasti dari karakteristik tanggapan peralihannya tidak dapat dilakukan.
Pada dasarnya terdapat dua pendekatan dalam perancangan kawasan frekuensi, yaitu pendekatan diagram polar dan pendekatan diagram Bode. Bila suatu kompensator ditambahkan, diagram polar harus digambarkan lagi, sehingga cukup menyita waktu dan kurang menarik untuk digunakan. Sedangkan suatu diagram Bode dari kompensator dapat dengan mudah ditambahkan ke diagram Bode sistem semula, sehingga menjadi diagram Bode sistem terkompensasi. Juga bila penguatan lup terbuka diubah, kurva besaran digeserkan ke atas atau ke bawah tanpa mengubah kemiringan kurva dan sudut fasanya.
Pendekatan yang umum untuk diagram Bode adalah pertama-tama dengan mengatur penguatan lup terbuka (gain adjustment) sehingga diperoleh persyaratan ketelitian keadaan tunak. Kemudian gambarkan kurva besaran dan sudut fasa dari lup terbuka tidak terkompensasi (dengan penguatan lup terbuka yang diatur). Jika spesifikasi margin fasa dan margin penguatan tidak dipenuhi, maka perlu ditambahkan suatu kompensator yang sesuai agar persyaratan yang diinginkan terpenuhi.
Perlu juga dicatat bahwa ketiga daerah frekuensi pada diagram Bode suatu sistem menunjukkan karakteristik sbb:
1. Daerah frekuensi rendah ( << gco): menggambarkan karakteristik keadaan tunak (tipe) sistem.
2. Daerah frekuensi tengah (frekuensi sekitar titik -1+j0 pada polar plot):
menggambarkan kestabilan relatif.
3. Daerah frekuensi tinggi ( >> gco): menggambarkan kompleksitas (orde) sistem.
8.2 Kompensasi Fasa Maju
Kompensasi fasa maju bertujuan untuk mengubah kurva respons frekuensi agar diperoleh sudut fasa maju yang cukup untuk mengkompensasi fasa mundur yang disebabkan oleh komponen-komponen sistem. Teknik kompensasi ini dapat digunakan, apabila spesifikasi unjuk kerja sistem yang diinginkan diberikan dalam besaran kawasan frekuensi seperti margin fasa dan margin penguatan, konstanta galat statik dst.
Kompensasi ini digunakan apabila tanggapan transient sistem tak memuaskan, atau bahkan sistem semula tak stabil.
8.2.1 Karakteristik Kompensator Fasa Maju
Kompensator fasa maju mempunyai fungsi alih
K Ts
Ts K
s T
s T
c c
1 1
1
1 ; (0 < < 1) (8-1)
Zero adalah s
T T
1 1
dan pole . Karena 0 < < 1, zero selalu terletak di sebelah kanan dari pole dalam bidang kompleks. Untuk yang kecil, pole terletak jauh di sebelah kiri (sumbu khayal). Dengan alasan implementasi praktis rangkaiannya, nilai minimum biasanya diambil sekitar 0,05. Hal ini berarti fasa maju maksimum yang dihasilkannya adalah 650.
1
0 Re
Im
m
1
2 (1 ) 1 2 (1 )
0
m
Gambar 8-1: Diagram polar dari kompensator fasa maju (j T 1)
(j T 1) dengan 0 < < 1.
Gambar 8-1 memperlihatkan diagram polar dari K j T
j T
c
1
1 ; (0 < < 1) dengan Kc =1. Untuk suatu nilai yang diberikan, sudut antara sumbu riel positif dan tangen garis yang digambarkan dari titik pusat ke setengah lingkaran memberikan sudut fasa maju maksimum, m. Frekuensi pada titik tangen disebut m. Dari Gambar 8-1 sudut fasa pada = m adalah m, dengan
sin m 1
2 1
2 1
1 ...……… (8-2) Persamaan (8-2) menghubungkan sudut fasa maju maksimum dengan nilai dari .
Gambar 8-2 memperlihatkan diagram Bode dari suatu kompensator bila Kc = 1 dan = 0,1.
0
100 T 100
T
10 T 10
T 1
T
1 T T
0 1,
T 0 1, 20 10 10 dB
m
m
900
00
rad dtk
( / )
rad dtk ( / )
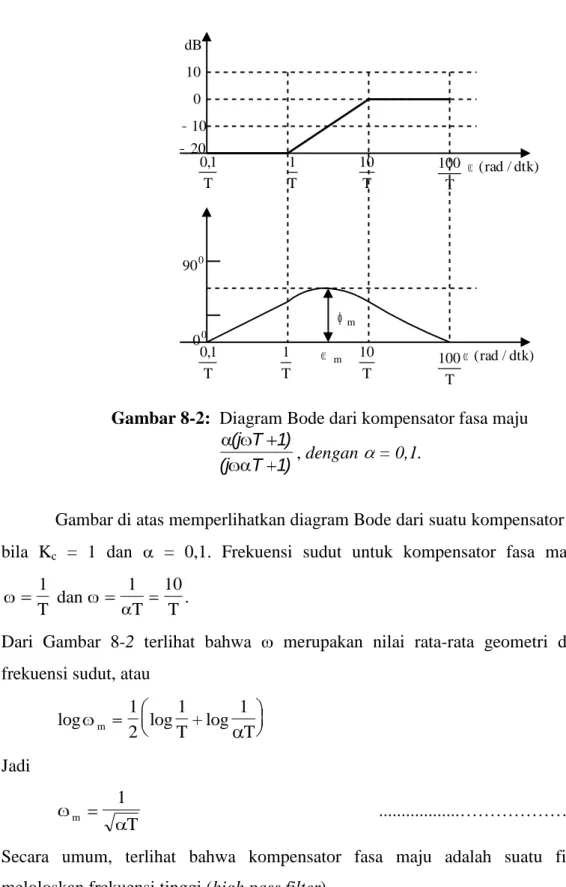
Gambar 8-2: Diagram Bode dari kompensator fasa maju (j T 1)
(j T 1), dengan = 0,1.
Gambar di atas memperlihatkan diagram Bode dari suatu kompensator fasa maju bila Kc = 1 dan = 0,1. Frekuensi sudut untuk kompensator fasa maju adalah
1 1 10
T dan T T .
Dari Gambar 8-2 terlihat bahwa merupakan nilai rata-rata geometri dari kedua frekuensi sudut, atau
log m log log
T T
1 2
1 1
Jadi
m T
1 ...………. (8-3)
Secara umum, terlihat bahwa kompensator fasa maju adalah suatu filter yang meloloskan frekuensi tinggi (high pass filter).
8.2.2 Prosedur Kompensasi Fasa Maju
Dengan mengacu pada Gambar 8-3, dimana G(s) adalah plant semula dan Gc(s) adalah kompensator yang dirancang, maka langkah-langkah perancangan suatu kompensator fasa maju adalah sebagai berikut.
Gc(s) G(s) +
-
Gambar 8-3: Diagram blok sistem kendali terkompensasi
1. Asumsikan fungsi alih kompensator fasa maju seperti pada Persamaan (8-1) berikut ini:
G s K Ts
Ts K
s T
s T
c( ) c 1 c
1
1
1 ; (0 < < 1)
Definisikan
Kc K (8-4)
sehingga
G s K Ts
c( ) Ts 1
1 (8-5)
Fungsi alih lup terbuka dari sistem yang terkompensasi adalah G s G s K Ts
Ts G s Ts
Ts
Ts
c( ) ( ) 1 ( ) Ts 1
1 1
1
KG(s) = 1G (s)1 (8-6) dengan
G1(s) = KG(s) (8-7)
Tentukan penguatan K yang memenuhi syarat seperti pada konstanta galat statik.
2. Dengan menggunakan penguatan K yang telah ditentukan, gambarkan diagram Bode sistem G1(s). Tentukan apakah margin fasanya memenuhi spesifikasi yang diinginkan. Apabila telah terpenuhi, maka perancangan dengan teknik gain adjustment ini telah selesai.
3. Apabila margin fasa sistem pada butir 2 tidak terpenuhi, maka tentukan sudut fasa maju yang perlu ditambahkan ke sistem G1(s) agar margin fasa yang diinginkan tercapai..
4. Tentukan faktor redaman dengan menggunakan Persamaan (8-2). Tentukan frekuensi di mana besaran sistem yang tidak terkompensasi G1(j ) sama dengan - 20log 1
. Pilih frekuensi ini sebagai frekuensi gain crossover yang baru.
Frekuensi ini berhubungan dengan m
T
1 , dan pergeseran sudut fasa m terjadi
pada frekuensi ini.
5. Tentukan frekuensi sudut dari kompensator fasa maju, sebagai berikut : zero kompensator fasa maju : 1
T pole kompensator fasa maju : 1
T
6. Dengan menggunakan nilai K yang ditentukan dalam langkah 1 dan yang ditentukan dalam langkah 4, hitunglah konstanta Kc dari Persamaan (8-4):
K K
c
7. Periksa margin penguatan untuk memastikan bahwa spesifikasinya telah terpenuhi.
Jika belum, ulangi proses perancangan dengan memodifikasi lokasi pole-zero dari kompensator sampai diperoleh suatu hasil yang diharapkan.
Contoh 8-1
Diberikan sistem kendali seperti terlihat pada Gambar 8-4 berikut.
+
-
s s( 42)Gambar 8-4: Diagram blok sistem kendali orde-2
Fungsi alih lup terbukanya adalah G s ( ) s s
( )
4 2
Diinginkan untuk merancang suatu kompensator sistem di atas, sehingga konstanta galat kecepatan statik Kv adalah 20 detik-1, margin fasa setidaknya 500 dan margin penguatan sedikitnya 10 dB.
Solusi:
Gunakan Persamaan (8-1) untuk kompensator :
G s K Ts
Ts K
s T
s T
c( ) c 1 c
1
1 1
Sistem terkompensasi akan memiliki fungsi alih lup terbuka Gc(s)G(s).
Definisikan G1(s) = KG(s) = 4 2 K
s s( ) dengan K Kc .
Langkah pertama dalam perancangan adalah mengatur penguatan K agar spesifikasi kinerja keadaan tunak dipenuhi atau memenuhi konstanta galat kecepatan statik. Karena konstanta yang diinginkan adalah 20 detik-1, maka
K sG s G s s Ts
Ts G s s K
s s K
v s c
s s
lim ( ) ( ) lim ( ) lim
( )
0 0 1
0
1 1
4
2 2 20
atau K = 10
Dengan K = 10, sistem terkompensasi akan memenuhi syarat keadaan tunak.
Kemudian gambarkan diagram Bode dari G j
j j j j
1
40 2
20
0 5 1
( )
( ) ( , )
Gambar 8-5 berikut memperlihatkan kurva besaran dan sudut fasa dari G1(j ).
Gambar 8-5: Diagram Bode dari G(j ) 10G(j ) 40 j (j 2)
1 .
Dari Gambar 8-5, diperoleh margin fasa 170 dan margin penguatan + dB. Margin fasa yang diinginkan adalah 500 (sedikitnya). Jadi perlu ditambahkan fasa maju setidaknya 330. Penambahan suatu kompensator fasa maju akan mengubah kurva besaran dalam diagram Bode, di mana frekuensi gain crossover akan tergeser ke kanan. Untuk menaikkan frekuensi gain crossover harus diimbangi dengan kenaikan fasa mundur dari G1(j ). Perhatikan pergeseran frekuensi gain crossover, asumsikan bahwa m, fasa maksimum yang diinginkan, adalah 380 (yang berarti 50 ditambahkan untuk kompensasi pergeseran frekuensi gain crossover).
Karena sin m 1
1 dan m 380, maka 0 24, .
Selanjutnya adalah menentukan frekuensi sudut 1 1
T dan T dari kompensator fasa maju. Sudut fasa maju maksimum m terjadi pada rata-rata geometrik dari dua frekuensi sudut, atau 1
T . Banyaknya modifikasi dalam kurva besaran pada
1
T yang termasuk bentuk Ts Ts
1
1adalah 1 1
1 1
1 1
1
1
j T
j T
j
T j
sehingga 1 1
0 24 1
0 49 6 2
, , , dB
dan G1(j ) 6 2, dB pada = 9 radian/detik. Frekuensi ini diperoleh sebagai frekuensi gain crossover yang baru c
T
1 , atau
1 4 41
T c , atau 1
T 18 4
c ,
Kompensator fasa maju yang ditentukan adalah G s K s
s K s
c( ) c , c s
,
, , 4 41
18 4
0 227 1 0 054 1 dengan nilai Kc ditentukan sebagai K K
c
10
0 24 41 7
, ,
Jadi fungsi alih kompensator menjadi G s s s
s
c( ) , , s
,
, 41 7 4 41 ,
18 4 100 227 1 0 054 1
Ingat bahwa : G s
K G s G s
G s G s G s
c c
c
( ) ( ) ( )
( ) ( ) ( )
1 10 10
Kurva besaran dan kurva sudut fasa untuk Gc(j )
10 terlihat pada Gambar 8-6. Sistem terkompensasi mempunyai fungsi alih lup terbuka G s G s s
s s s
c( ) ( ) , ,
, ( )
41 7 4 41 18 4
4 2
Gambar 8-6: Diagram Bode sistem terkompensasi.
Kompensator fasa maju menyebabkan frekuensi gain crossover naik dari 6,3 radian/detik menjadi 9 radian/detik. Kenaikan frekuensi ini berarti kenaikan dalam lebar pita, yang berimplikasi pada meningkatnya tanggapan. Margin fasa dan margin penguatan masing-masing 500 (kira-kira) dan + dB. Sistem terkompensasi terlihat dalam Gambar 8-7 berikut.
+
- 41 7, (s s18 44 41,, ) s s( 42)
Gambar 8-7: Diagram blok sistem terkompensasi.
8.3 Kompensasi Fasa Mundur
Kompensasi ini bertujuan untuk meredam daerah frekuensi tinggi agar diperoleh cukup margin fasa. Hal ini dicapai dengan memperbesar penguatan sistem pada frekuensi rendah. Dengan demikian, kompensasi ini menghasilkan perbaikan dalam ketelitian tanggapan tunak sistem, meskipun dengan akibat sedikit memperlambat tanggapan transientnya.
8.3.1 Karakteristik Kompensator Fasa Mundur
Kompensator fasa mundur mempunyai fungsi alih
G s K Ts
Ts K
s T
s T
c( ) c 1 c
1
1
1 ; ( > 1) (8-8)
Dalam bidang kompleks, kompensator fasa mundur mempunyai zero pada s T 1 dan
pole pada s
T
1 . Pole terletak di sebelah kanan zero.
0 Im
Re
Kc Kc
0
Gambar 8-8: Diagram polar suatu kompensator fasa mundur K (j T 1)
j T 1
c .
0
10 T 1
T T 0 1, 10
dB
00
rad dtk
( / )
rad dtk
( / )
0 01, T 900 30 20
Gambar 8-9: Diagram Bode suatu kompensator fasa mundur (j T 1)
j T 1 untuk =10 . Gambar 8-9 memperlihatkan suatu diagram Bode kompensator fasa mundur, dengan Kc = 1 dan = 10. Frekuensi sudut kompensator fasa mundur adalah pada
1 1
T dan T. Dari Gambar 8-9 terlihat bahwa kompensator fasa mundur adalah suatu filter yang melalukan sinyal frekuensi rendah (low pass filter).
8.3.2 Prosedur Kompensasi Fasa Mundur
Langkah-langkah perancangan kompensator fasa mundur untuk sistem pada Gambar 8-3 adalah seperti berikut.
1. Asumsikan kompensator fasa mundur memiliki fungsi alih seperti Persamaan (8-8):
G s K Ts
Ts K
s T
s T
c( ) c 1 c
1
1
1 ; ( > 1)
Definisikan Kc K (8-9)
Maka G s K Ts
c( ) Ts 1
1 (8-10)
Fungsi alih lup terbuka sistem terkompensasi adalah G s G s K Ts
Ts G s Ts
Ts KG s Ts
Ts G s
c( ) ( ) 1 ( ) ( ) ( )
1
1 1
1
1 1 (8-11) dengan G s1( ) KG s( )
Tentukan penguatan K untuk memenuhi syarat pada konstanta galat statik.
2. Jika sistem tak terkompensasi G1(j ) KG j( )tidak memenuhi spesifikasi margin fasa dan margin penguatan, maka carilah tititk frekuensi di mana sudut fasa fungsi alih lup terbuka = -1800 ditambah margin fasa yang diinginkan. Margin fasa yang diinginkan margin fasanya ditentukan ditambah 50 sampai 120. (Penambahan 50 sampai 120 mengkompensasi fasa mundur dari kompensator fasa mundur). Pilih frekuensi ini sebagai frekuensi gain crossover yang baru.
3. Untuk mencegah efek gangguan fasa mundur terhadap kompensator fasa mundur, pole dan zero dari kompensator fasa mundur harus ditempatkan pada lokasi yang lebih rendah dibanding frekuensi gain crossover yang baru. Jadi, pilih frekuensi sudut 1
T (berkaitan dengan zero kompensator fasa mundur) 1 oktaf atau 1 dekade di bawah frekuensi gain crossover yang baru.
4. Tentukan redaman yang penting yang memberikan kurva besaran turun ke 0 dB pada frekuensi gain crossover yang baru. Redaman -20log menentukan nilai . Selanjutnya frekuensi sudut lainnya (berhubungan dengan pole kompensator fasa mundur) ditentukan dari 1
T .
5. Dengan menggunakan nilai K yang ditentukan dalam langkah 1 dan yang ditentukan dalam langkah 5, hitunglah konstanta Kc dari Persamaan (8-9) : K K
c .
Contoh 8-2
Perhatikan sistem seperti yang terlihat pada Gambar 8-10 berikut.
+
- 1
1 0 5 1 s s( )( , s )
Gambar 8-10: Sistem kendali bertipe-1
Fungsi alih lup terbukanya: G s
s s s
( ) ( )( , )
1 1 0 5 1
Diinginkan untuk mengkompensasi sistem sehingga konstanta galat kecepatan statik Kv adalah 5 detik-1, margin fasa sedikitnya adalah 400, dan margin penguatan setidaknya 10 dB.
Solusi:
Akan digunakan suatu kompensator fasa mundur pada Persamaan (8-8):
G s K Ts
Ts K
s T
s T
c( ) c 1 c
1
1
1 ; ( > 1)
Didefinisikan Kc K
Juga didefinisikan G s KG s K
s s s
1( ) ( ) 1 0 5 1
( )( , )
Langkah pertama dalam perancangan adalah mengatur penguatan K untuk memperoleh konstanta galat kecepatan statik yang diinginkan. Jadi
K sG s G s s Ts
Ts G s sG s
sK
s s s K
v s c
s s
s
lim ( ) ( ) lim ( ) lim ( )
lim ( )( , )
0 0 1
0 1
0
1 1
1 0 5 1 5
atau K = 5
Dengan K = 5, sistem terkompensasi memenuhi syarat kinerja keadaan tunak.
Selanjutnya gambarkan diagram Bode dari G j
j j j
1
5
1 0 5 1
( )
( )( , )
Gambar 8-11 memperlihatkan kurva besaran dan kurva sudut fasa dari G1(j ). Dari gambar tersebut diperoleh margin fasa = -200, yang berarti sistem tidak stabil.
Gambar 8-11: Diagram Bode untuk sistem tak terkompensasi (G1).
Gambar 8-12: Diagram Bode untuk kompensator (Gc).
Gambar 8-13: Diagram Bode untuk sistem terkompensasi (GcG).
Penambahan kompensator fasa mundur mengubah kurva fasa dari diagram Bode, harus ditambahkan antara 50 sampai 120 terhadap margin fasa yang dikompensasi untuk memodifikasi kurva fasa. Karena frekuensi yang berkaitan dengan margin fasa 400 adalah 0,7 radian/detik, maka frekuensi gain crossover yang baru (dari sistem terkompensasi) harus dipilih dekat dengan nilai ini. Untuk menghindari konstanta waktu yang terlalu besar, dipilih frekuensi sudut 1
T (yang berkaitan dengan zero kompensator fasa mundur) adalah 0,1 radian/detik. Karena frekuensi sudut ini tidak terlalu jauh di bawah frekuensi gain crossover yang baru, modifikasi dalam kurva fasa boleh tidak kecil. Selanjutnya ditambahkan 120 untuk margin fasanya. Margin fasanya menjadi 520. Sudut fasa fungsi alih lup terbuka yang tidak terkompensasi adalah -1280 pada = 0,5 radian/detik. Selanjutnya dipilih frekuensi gain crossover adalah 0,5 radian/detik. Untuk membuat kurva besaran turun ke 0 dB pada frekuensi gain crossover yang baru, dalam hal ini adalah -20 dB. Jadi 20 1
20
log atau = 10.
Frekuensi sudut lainnya 1
T , yang berkaitan dengan pole dari kompensator fasa mundur, ditentukan dengan 1
T 0 01, radian/detik.
Jadi, fungsi alih kompensator fasa mundur adalah
G s K s
s K
c( ) c(10) 10 1 c
100 1
s + 1 10 s + 1
100
Karena penguatan K telah ditentukan besarnya = 5 dan ditentukan = 10, maka
K K
c
5
10 0 5,
Fungsi alih lup terbuka sistem terkompensasi adalah
G s G s s
s s s s
c( ) ( ) ( )
( )( )( , )
5 10 1
100 1 1 0 5 1
Kurva besaran dan kurva sudut fasa Gc(j )G(j ) terlihat pada Gambar 8-13. Dari gambar ini terlihat bahwa margin fasa sistem terkompensasi sekitar 400, margin penguatan sekitar 11 dB, dan konstanta galat kecepatan statik adalah 5 detik-1, semuanya sesuai dengan yang diinginkan. Jadi sistem terkompensasi memenuhi syarat pada keadaan tunak dan kestabilan relatif.
Frekuensi gain crossover yang baru menurun dari 2 radian/detik menjadi 0,5 radian/detik, yang berarti lebar pita frekuensi nya berkurang (menyebabkan tanggapan sistem lebih lambat).
8.4 Kompensasi Fasa Mundur-Maju
Kompensasi ini menggabungkan kedua kompensasi fasa maju dan fasa mundur yang telah dibahas sebelumnya. Pada frekuensi rendah kompensasi ini memiliki fasa mundur, sedang fasa majunya berada pada daerah frekuensi tinggi. Dengan demikian, kompensasi ini akan memperbesar lebar bidang frekuensi (disebabkan oleh bagian fasa majunya) dan memperbesar penguatan pada frekuensi rendah (disebabkan oleh bagian fasa mundurnya).
8.4.1 Karakteristik Kompensator Fasa Mundur-Maju
Fungsi alih kompensator fasa mundur-maju adalah
G (s K
s 1
T s 1
T
s T s 1
T
c c
1 2
1 2
) ...………. (8-12)
dengan > 1 dan > 1.
Bentuk
s 1
T s T
1
1
1 1
1
1 1
T s T s
; ( > 1) merupakan jaringan fasa maju.
Sedang bentuk s 1
T
s T
; ( > 1)
2
2
1
1 1
2 2
T s
T s merupakan jaringan fasa mundur.
Dalam perancangan suatu kompensator fasa mundur-maju, seringkali dipilih = untuk memudahkan masalah. Dalam masalah ini, dipilih = . Diagram polar kompensator fasa mundur-maju dengan Kc = 1 dan = terlihat pada Gambar 8-14 berikut.
0 1
Im
Re
1 0
Gambar 8-14: Diagram polar dari suatu kompensator mundur-maju yang diberikan oleh Persamaan (8-3), dengan Kc = 1 dan = .
Terlihat bahwa untuk 0 < < 1, kompensator berlaku sebagai kompensator fasa mundur; sementara untuk 1< < , berlaku sebagai kompensator fasa maju.
Frekuensi 1 adalah frekuensi di mana sudut fasa = 0, yang diberikan oleh
1
1 2
1
T T (8-13)
Gambar 8-15 memperlihatkan diagram Bode dari suatu kompensator fasa mundur- maju, bila Kc = 1, = dan T2 10T1. Terlihat bahwa kurva besaran mempunyai nilai 0 dB pada daerah frekuensi rendah dan tinggi.
Gambar 8-15: Diagram blok dari suatu kompensator mundur-maju yang diberikan oleh Persamaan (8-3) dengan Kc = 1, = dan T2 10T1.
8.4.2 Prosedur Kompensasi Fasa Mundur-Maju
Pada prinsipnya, prosedur perancangan kompensasi fasa mundur-maju adalah kombinasi dari prosedur perancangan kompensasi fasa mundur dan kompensasi fasa maju yang telah dibahas sebelumnya.
Asumsikan bahwa kompensator fasa mundur-maju berbentuk Persamaan (8-12) dengan = :
2 1
2 1
c 2
1
2 1
c c
T s 1 s T
T s 1 T s 1 K 1 T T 1
) 1 T )(
1 T K ( ) (s G
s s
s ………... (8-14)
Bagian fasa maju dari kompensator ini (bagian yang menyangkut T1) mengubah kurva tanggapan frekuensi dengan menambah sudut fasa maju dan mengurangi margin fasa pada frekuensi gain crossover. Bagian fasa mundur (bagian yang menyangkut T2) mengubah redaman dekat dan di atas frekuensi gain crossover dan selanjutnya mengizinkan peningkatan pada rentang frekuensi rendah untuk memperbaiki kinerja keadaan tunak.
Contoh 8-3
Perhatikan sistem umpan balik satuan yang mempunyai fungsi alih lup terbuka
G s K
s s s
( ) ( 1)( 2)
Diinginkan konstanta galat kecepatan statik Kv 10 detik-1, margin fasa 500, dan margin penguatan 10 dB atau lebih.
Solusi:
Asumsikan bahwa digunakan kompensator fasa mundur-maju seperti dalam persamaan (8-14). Fungsi alih lup terbuka sistem terkompensasi adalah Gc(s)G(s).
Karena penguatan K dari kendalian dapat diatur, asumsikan Kc = 1, sehingga lim ( )
s G sc
0 1.
Dari persyaratan konstanta galat kecepatan statik, diperoleh
K sG s G s sG s K
s s s
K
v s c
s c
lim ( ) ( ) lim ( )
( )( )
0 0 1 2 2 10
Jadi K = 20
Selanjutnya buat diagram Bode sistem tak terkompensasi dengan K = 20 seperti terlihat pada Gambar 8-16. Dari gambar ini terlihat bahwa margin fasa sistem tak terkompensasi adalah -32o , yang berarti sistem semula tidak stabil.
Langkah selanjutnya adalah memilih frekuensi gain crossover yang baru. Dari kurva sudut fasa G(j ), terlihat G(j ) = -1800 pada = 1,5 radian/detik. Frekuensi ini selanjutnya dipilih sebagai frekuensi gain crossover yang baru, selanjutnya sudut fasa maju yang diinginkan pada = 1,5 radian/detik kira-kira 500.
Sekali dipilih frekuensi gain crossover adalah 1,5 radian/detik, dapat ditentukan frekuensi sudut bagian fasa mundur dari kompensator fasa mundur-maju. Selanjutnya dipilih frekuensi sudut 1
T2 yang berkaitan dengan zero dari bagian fasa mundur kompensator menjadi 1 dekade di bawah frekuensi gain crossover yang baru, atau pada
= 0,15 radian/detik.
Gambar 8-16 : Diagram Bode untuk sistem tak terkompensasi (G).
Untuk kompensator fasa maju, sudut fasa maju maksimum, m diberikan oleh persamaan (8-2), di mana dalam persamaan (8-2) adalah 1
dalam kasus ini. Dengan
mensubstitusikan 1
ke dalam persamaan (8-2), maka
sin m
1 1 1 1
1
1 (8-15)
Gambar 8-17 : Diagram Bode untuk kompensator (Gc ).
Gambar 8-18 : Diagram Bode untuk sistem terkompensasi (GcG).
Bila = 10, maka m = 54,90. Karena diinginkan margin fasa 50 , dapat dipilih = 10.
Jadi = 10, sehingga frekuensi sudut 1
T2 (yang berkaitan dengan pole bagian fasa mundur dari kompensator) menjadi = 0,015 radian/detik. Fungsi alih bagian fasa mundur dari kompensator fasa mundur-maju akan menjadi s
s
s s 0 15
0 015 10 6 67 1 66 7 1 ,
,
, ,
Bagian fasa maju dapat ditentukan seperti berikut. Karena frekuensi gain crossover yang baru adalah = 1,5 radian/detik, dari Gambar 8-17, G(j1,5) didapat 13 dB. Jadi jika kompensator fasa mundur-maju menyumbang -13 dB pada = 1,5 radian/detik, maka frekuensi ini adalah frekuensi gain crossover baru, seperti yang diinginkan. Dari persyaratan ini, adalah mungkin untuk menggambar sebuah garis lurus dengan kemiringan 20 dB/dekade, melalui titik (-13 dB, 1,5 radian/detik). Perpotongan garis ini dan garis 0 dB serta garis -20 dB menentukan frekuensi sudut. Jadi frekuensi sudut untuk bagian mendahului adalah = 0,7 radian/detik dan = 7 radian/detik.
Dengan demikian, fungsi alih bagian mendahului dari kompensator fasa mundur-maju menjadi s
s
s s 0 7
7 1 10
1 43 1 0 143 1
, ,
,
Kombinasi fungsi alih dari bagian tertinggal dan mendahului dari kompensator menjadi fungsi alih kompensator fasa mundur-maju. Karena dipilih Kc = 1, maka
G s s
s
s s
s s
s
c( ) , , s
,
, ,
, , 0 7
7
0 15 0 015
1 43 1 0 143 1
6 67 1 66 7 1
Kurva besaran dan sudut fasa dari kompensator fasa mundur-maju yang dirancang terlihat pada Gambar 8-17. Fungsi alih lup terbuka sistem terkompensasi adalah
G s G s s s
s s s s s
c( ) ( ) ( , )( , )
( )( , ) ( )( )
0 7 0 15 20
7 0 015 1 2
10 1 43 1 6 67 1
0 143 1 66 7 1 1 0 5 1
( , )( , )
( , )( , )( )( , )
s s
s s s s s
Kurva besaran dan kurva sudut fasa sistem dalam persamaan diatas juga terlihat dalam Gambar 8-18. Margin fasa sistem terkompensasi adalah 500, margin penguatan adalah 16 dB, dan konstanta galat kecepatan statik adalah 10 detik-1. Semua persyaratan dipenuhi dan perancangan telah dilengkapi.
8.5 Perbandingan Antar Kompensasi
1. Kompensasi fasa maju mencapai hasil yang diinginkan melalui manfaat kontribusi fasa maju; sedangkan kompensasi fasa mundur mencapai hasil yang diinginkan melalui sifat peredamannya pada frekuensi tinggi. (Dalam beberapa masalah perancangan kedua kompensasi fasa mundur dan kompensasi fasa maju dapat memenuhi spesifikasi).
2. Kompensasi fasa maju biasanya digunakan untuk memperbaiki kestabilan margin.
Kompensasi fasa maju menghasilkan frekuensi gain crossover yang lebih tinggi berarti memperbesar lebar pita. Suatu lebar pita yang besar akan mereduksi waktu settling. Lebar pita sistem dengan kompensasi fasa maju selalu lebih besar dibandingkan dengan kompensasi fasa mundur. Jadi, jika diinginkan suatu lebar pita yang besar atau tanggapan yang cepat, sebaiknya digunakan kompensasi fasa maju.
Tetapi jika terdapat sinyal derau, maka tidak diinginkan suatu lebar pita yang besar, karena hal ini akan membuat sistem lebih rentan terhadap sinyal derau karena menambah penguatan frekuensi tinggi.
3. Kompensasi fasa maju memerlukan suatu kenaikan tambahan dalam penguatan untuk mengimbangi peredaman yang terdapat dalam jaringan fasa maju. Hal ini berarti kompensasi fasa maju akan memerlukan suatu penguatan yang lebih besar dari yang dibutuhkan oleh kompensasi fasa mundur. Dalam beberapa kasus, suatu penguatan yang lebih besar, secara tidak langsung memperbesar ruang, memperbesar berat dan meningkatkan biaya.
4. Kompensasi fasa mundur mereduksi penguatan sistem pada frekuensi tinggi tanpa mereduksi penguatan sistem pada frekuensi rendah. Karena lebar pita sistem direduksi, tanggapan sistem menjadi lebih lambat. Karena penguatan frekuensi tinggi dikurangi, penguatan total sistem dapat dinaikkan Dengan demikian penguatan frekuensi rendah dapat dinaikkan dan ketelitian keadaan tunak dapat diperbaiki. Juga derau frekuensi tinggi yang meliputi sistem dapat diredam.
5. Jika diinginkan tanggapan yang cepat dan ketelitian statik yang baik, dapat digunakan suatu kompensator fasa mundur-maju. Dengan kompensator jenis ini penguatan frekuensi rendah dapat dinaikkan (yang berarti akan memperbaiki
ketelitian keadaan tunak), sementara pada waktu yang sama lebar pita sistem dan kestabilan margin dapat ditingkatkan.
6. Meskipun sejumlah besar tugas-tugas kompensasi praktis dapat dilakukan dengan kompensator fasa maju, fasa mundur atau fasa mundur-maju, untuk sistem yang rumit, kompensasi sederhana dengan menggunakan kompensator-kompensator ini tidak mungkin memberikan hasil yang memuaskan, sehingga harus digunakan kompensator lain yang mempunyai konfigurasi pole-zero yang berbeda.