6
BAB II
DASAR TEORI
Pada bab ini akan dijelaskan teori-teori penunjang yang diperlukan dalam merancang dan merealisasikan skripsi ini. Bab ini dimulai dari pengenalan singkat dari komponen elektronik utama yang dipakai yaitu yang pertama mikrokontroler. Pada skripsi ini dipakai mikrokontroler jenis Arduino Mega 2560 sebagai pengendali utama dari sistem, kemudian modul Voice Recognition V3 Module sebagai alat untuk
melaksanakan proses pengenalan suara. Modul sensor ultrasonik juga ditambahkan dalam sistem untuk mendeteksi halangan supaya kursi roda elektrik tidak menabrak penghalang yang ada di depan maupun belakangnya, digunakan juga buzzer yang berfungsi sebagai penanda bahwa di depan atau di belakang kursi roda elektrik terdapat penghalang.
2.1. Arduino Mega 2560
Mikrokontroler adalah sebuah computer mini yang berfungsi sebagai pengontrol rangkaian elektronik dan umumnya terkandung sebuah inti prosesor, memori, dan perlengkapan input-output di dalamnya. Salah satu mikrokontroler yang sering digunakan di pasaran saat ini adalah Arduino. Arduino adalah perangkat elektronik open source yang di dalamnya terdapat komponen utama, yaitu sebuah IC mikrokontroler dengan jenis AVR dari perusahaan Atmel.
7
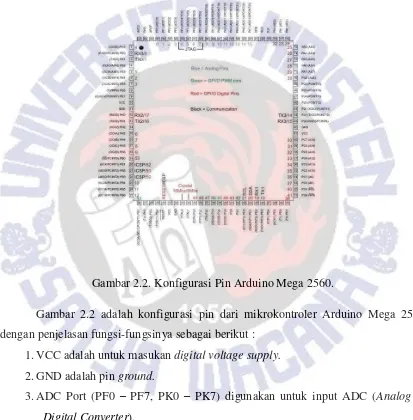
Pada Arduino Mega 2560 digunakan IC mikrokontroler Atmega 2560. Arduino Mega 2560 memiliki 54 pin digital input/output, di mana 15 pin dapat digunakan sebagai output PWM, 16 pin digunakan sebagai output analog, dan 4 pin sebagai UART(port serial hardware), 16Mhz kristal osilator, koneksi USB, jack power, header ICSP, dan tombol reset.
Gambar 2.2.Konfigurasi Pin Arduino Mega 2560.
Gambar 2.2 adalah konfigurasi pin dari mikrokontroler Arduino Mega 2560 dengan penjelasan fungsi-fungsinya sebagai berikut :
1.VCC adalah untuk masukan digital voltage supply. 2.GND adalah pin ground.
3.ADC Port (PF0 – PF7, PK0 – PK7) digunakan untuk input ADC (Analog to Digital Converter).
8
5.Serial:0 (RX) dan 1 (TX); serial 1:19 (RX) dan 18 (TX); serial 2:17 (RX) dan 16 (TX); serial 3:15 (RX) dan 14 (TX) digunakan untuk menerima (RX) dan mengirimkan (TX) data serial TTL. Pin 0 dan 1 juga terhubung ke pin chip ATmega16U2 serial USB-to-TTL.
6.Eksternal interupsi : pin 2 (interrupt 0), pin 3 (interrupt 1), pin 18 (interrupt 5), pin 19 (interrupt 4), pin 20 (interrupt 3) dan pin 21 (interrupt 2). Pin ini yang dapat dikonfigurasikan untuk memicu sebuah interupsi pada nilai yang rendah, meningkat atau menurun, atau perubah nilai.
7.SPI : Pin 50(MISO), pin 51(MOSI), pin 52(SCK), pin 53(SS). Pin ini mendukung komunikasi SPI menggunakan perpustakaan SPI. Pin SPI juga tehubung dengan header ICSP, yang secara fisik kompatibel dengan Arduino Uno, Arduino Duemilanove dan Arduino Diecimila.
8.LED : Pin 13. Tersedia secara built-in pada papan arduino mega 2560. Led terhubung ke pin digital 13. Ketika pin di-set bernilai HIGH, maka LED menyala (ON), dan ketika pin di-set bernilai LOW, maka LED padam (OFF). 9.TWI : Pin 20 (SDA dan pin 21 (SCL). Yang mendukung komunikasi TWI
menggunakan perpustakaan Wire. Pin ini tidak di lokasi yang sama dengan pin TWI pada Arduino Duemilanove dan Arduino Diecimila.
10.RESET. Jalur LOW ini digunakan untuk me-reset (menghidupkan ulang) mikrokontroler. Jalur ini biasanya digunakan untuk menambahkan tombol reset pada shield yang menghalangi papan utama Arduino.
11.XTAL1 dan XTAL2 berfungsi sebagai pin external clock. 12.AVCC adalah pin tegangan supply untuk ADC.
13.AREF. Referensi tegangan untuk input analog. Digunakan dengan fungsi analogReference.
2.2. Voice Recognition V3 Module
9
Suara apapun dapat direkam sebagai perintah dengan catatan suara yang direkam mempunyai lama pengucapan selama 1,5 detik. Pengguna harus merekam suara pada modul terlebih dahulu sebelum modul ini dapat mengenali setiap perintah suara yang diucapkan oleh pengguna. Selanjutnya perintah suara yang tersimpan dapat digunakan sebagai perintah untuk mengendalikan aktuator.
Modul Voice Recognition V3 ini memiliki beberapa parameter dan fitur antara lain adalah:
a. Parameter
1. Memiliki tegangan operasi 5 volt. 2. Konsumsi arus kurang dari 40 mA.
3. Analog interface : 3,5mm mono-channel michrophone connector+ michrophone pin interface.
4. Dimensi 31mm x 50mm.
5. Recognition accuracy 99% (under ideal environment). b. Fitur
1. Support maksimum 80 perintah suara, dengan setiap pengucapan 1,5detik.
2. Maksimum 7 perintah suara digunakan dalam waktu yang bersamaan.
3. Arduino library is supplied. 4. Easy control : UART /GPIO. 5. User control General Pin Output.
10
2.3. Sensor Ultrasonik (SRF-04)
Dalam perancangan dan pembuatan skripsi ini akan digunakan sensor ultrasonik sebagai pendeteksi penghalang yang ada di depan maupun belakang kursi roda elektrik.
Sensor ultrasonik bekerja dengan cara memancarkan sinyal ultrasonik sesaat dan menghasilkan pulsa output yang sesaat dan menghasilkan pulsa output yang sesuai dengan waktu pantul sinyal ultrasonik sesaat kembali menuju sensor. Dengan mengukur lebar pulsa pantulan tersebut jarak target di depan
Modul sensor ultrasonik SRF-04 ini memiliki spesifikasi sebagai berikut:
1. Tegangan kerja : 5volt.
2. Konsumsi arus : 30 mA (maksimal 50mA). 3. Frekuensi kerja : 40KHz.
4. Jangkauan : 3 cm- 300 cm
11
Gambar 2.4.Sensor Ultrasonik SRF-04
Gambar 2.5.Diagram Waktu Sensor Ultrasonik SRF-04
12
2.4. Buzzer.
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah energi listrik menjadi getaran suara. Buzzer terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet. Kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya. Karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
Pada skripsi ini, buzzer digunakan sebagai indikator yang terpasang pada kursi roda elektrik, yang berfungsi antara lain sebagai indicator adanya penghalang di depan maupun di belakang kursi roda elektrik.
Gambar 2.6. Buzzer.
2.5. Baterai.
Karena pada perancangan dan pembuatan skripsi kali ini akan dibuat sebuah alat yang portable, maka digunakan baterai untuk menyuplai tegangan pada mikrokontroler, sensor dan aktuator. Baterai yang dipakai adalah aki mobil yang memiliki tegangan sebesar 12 volt .
13
2.6. Motor DC
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Bagian utama motor DC adalah stator dan rotor dimana kumparan medan pada motor DC disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Gambar 2.8. Gambar Umum Motor DC
Motor DC ini merupakan aktuator utama pada kursi roda elektrik ini yang
berfungsi untuk menggerakan kursi roda untuk bergerak maju, mundur, kanan dan kiri.
2.
14 2.7. Driver Motor
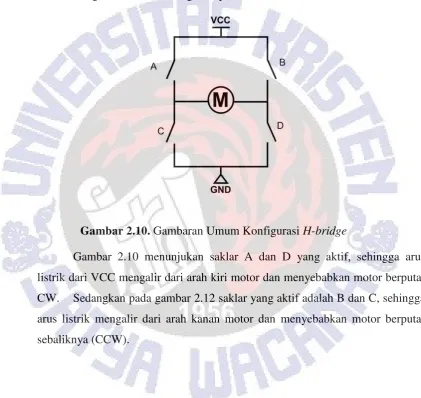
Pada skripsi ini, kursi roda yang akan direalisasikan diharuskan untuk bergerak maju, mundur, berputar searah jarum jam/Clockwise (CW), dan berputar berlawanan dengan jarum jam/CounterClockwise (CCW). Maka digunakanlah driver motor H-bridge. Fungsi utama dari rangkaian H-bridge itu adalah untuk mengubah arah arus listrik di motor (M) ,baik dari kiri atau kanan. Perubahan arah arus tersebut digunakan untuk mengubah putaran motor, CW atau CCW.
Gambar 2.10. Gambaran Umum Konfigurasi H-bridge
15
Gambar 2.11. H-Bridge Saat Motor Gambar 2.12. H-bridge Saat Motor