Abstrak— Paper ini menyajikan hasil pemodelan dan analisa getaran motor bensin 4 langkah 2 silinder 650cc segaris dengan sudut engkol 90° untuk rubber mount
.
Dalam penganalisaan dibutuhkan data-data teknis mesin yang selanjutnya dapat digunakan dalam pemodelan matematis sistem. Setelah itu dilakukan analisa berdasarkan kinematika dan dinamika mekanisme, selanjutnya dianalisa berdasarkan prinsip mekanika getaran untuk mendapatkan persamaan gerak yang akan dimasukkan kedalam software untuk mendapatkan respon getaran engine (bounching dan pitching). Setelah dilakukan analisa pada grafik yang diperoleh didapatkan suatu kesimpulan bahwa perubahan panjang connecting rod tidak banyak berpengaruh pada respon getaran engine. Untuk respon engine terhadap gaya eksitasi impulsif menunjukkan bahwa sistem telah mencapai kestabilan sebelum t=0,5 detik. Untuk respon engine terhadap eksitasi periodik terdapat 2 kesimpulan yang didapatkan. Yang pertama bahwa respon pitching menunjukkan nilai yang 30x lebih besar dibandingkan respon bouncing. Yang kedua bahwa perubahan kecepatan putaran engine sangat berpengaruh terhadap respon getaran engine, dimana pada respon getaran displacement dan velocity menunjukkan nilai yang semakin kecil saat rpm semakin besar dengan penurunan untuk respon bouncing sebesar ±10%, untuk repon pitching sebesar ±70% dan untuk respon getaran acceleration menunjukkan nilai yang semakin besar saat bertambahnya kecepatan putaran (rpm) dengan peningkatan ±50%.Kata kunci: motor bensin 4 langkah 2 silinder segaris, getaran periodik, connecting rod.
I. PENDAHULUAN
Kebutuhan dan permintaan mobil yang kian meningkat menyebabkan tingkat impor mobil Indonesia dari negara lain semakin meningkat [5]. Untuk itu pemerintah bekerja sama dengan ITS membuat motor bensin 4 langkah 2 silinder 650cc segaris. Oleh karena itu perlu adanya pemodelan dan analisa pada getaran motor tersebut demi kenyamanan saat nantinya mesin tersebut digunakan pada mobil.
Pada tahun 2005 telah dilakukan analisa isolasi getaran untuk mengetahui perbandingan penggunaan antara mounting hidrolik dan elastomeric mount (rubber mount).
Didapatkan properties untuk masing-masing mount, termasuk properties dari rubber mount yang nantinya akan digunakan dalam penelitian ini [3]. Pada tahun 2010 juga telah dilakukan analisis terhadap getaran pada sepeda motor berbasis LABVIEW oleh Benny, mahasiswa S2 Universitas Indonesia. Benny meneliti karakteristik getaran yang terjadi pada mesin sepeda motor jenis satu silinder dan satu piston, satu camshaft [4].
Pada penelitian kali ini akan dilakukan pemodelan dan analisa getaran yang terjadi pada motor bensin 4 langkah jenis double cylinder segaris dengan kapasitas 650cc dan sudut antara engkol 90° dan menggunakan satu jenis mounting yakni rubber mount. Dalam melakukan penelitian ini digunakan beberapa variasi pada kecepatan putaran engine dan panjang connecting rod untuk mengetahui hubungan keterkaitan antara perubahan variabel tersebut dengan respon getaran engine.
II. METODOLOGI PENELITIAN
Pada penelitian ini dilakukan dalam tiga tahap utama.
Tahap awal dari penelitian ini adalah studi literature dan pengumpulan data-data teknis mengenai mesin 4 langkah 2 silinder 650cc segaris ini baik dari buku, jurnal maupun hasil penelitian dan percoban yang telah dilakukan sebelumnya.
Tahap yang kedua adalah pembuatan model matematis dari sistem, dari sana nantinya akan dilakukan analisa sistem secara kinematika dinamika dan kemudian akan mendapatkan persamaan gerak dari sistem.
Tahap ketiga merupakan tahap simulasi, dimana akan dianalisa persamaan gerak sistem yang telah diperoleh dengan variasi panjang connecting rod dan kecepatan putaran (rpm) yang telah ditentukan sebelumnya. Untuk variasi panjang connecting rod adalah 115.6 mm, 125.6 mm, 135.6 mm. Dan variasi kecepatan putaran adalah 1000 rpm, 3000 rpm dan 5000 rpm.
III. PEMODELAN MATEMATIS ENGINE A. Data Teknis Engine
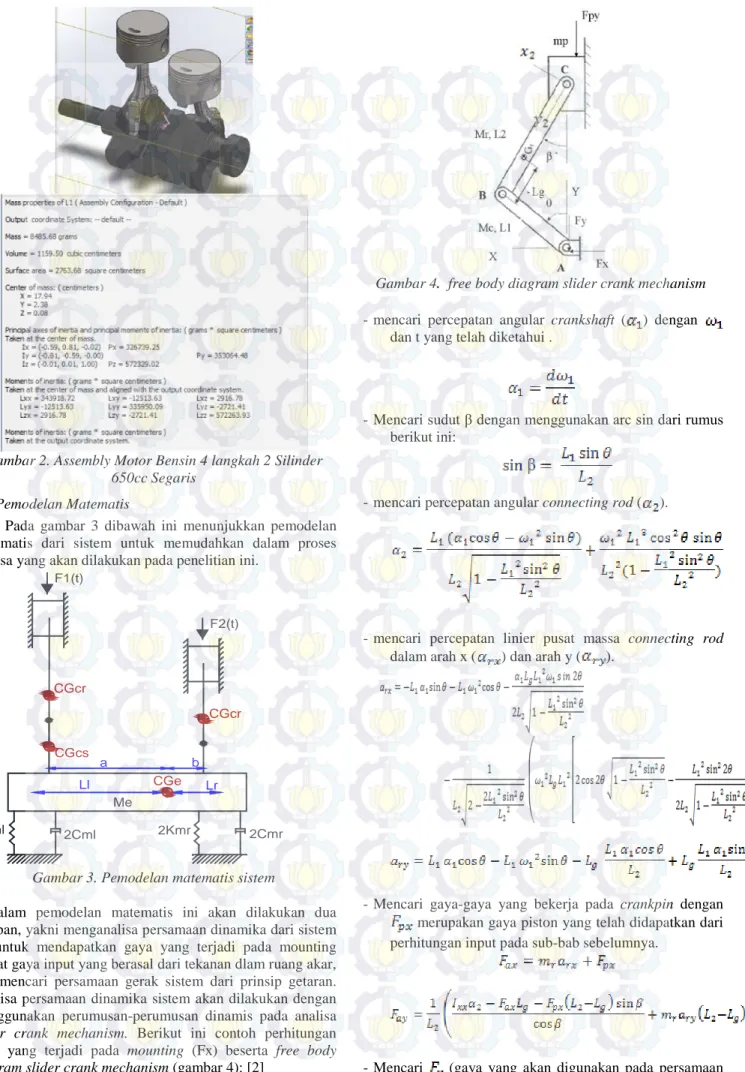
Pada gambar 1 dan gambar 2 dapat diketahui bentuk fisik dan hasil drawing, sehingga dari sini didapatkan dimensi engine yang akan digunakan dalam melakukan pemodelan dan analisa getaran engine ini.
Gambar 1. Motor Bensin 4 langkah 2 Silinder 650cc segaris tampak atas
Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected]
Gambar 2. Assembly Motor Bensin 4 langkah 2 Silinder 650cc Segaris
B. Pemodelan Matematis
Pada gambar 3 dibawah ini menunjukkan pemodelan matematis dari sistem untuk memudahkan dalam proses analisa yang akan dilakukan pada penelitian ini.
Me
2Kml 2Cml
F1(t)
F2(t)
2Kmr 2Cmr
CGe CGcs
CGcr
CGcr
Lr Ll
a b
Gambar 3. Pemodelan matematis sistem
Dalam pemodelan matematis ini akan dilakukan dua tahapan, yakni menganalisa persamaan dinamika dari sistem ini untuk mendapatkan gaya yang terjadi pada mounting akibat gaya input yang berasal dari tekanan dlam ruang akar, dan mencari persamaan gerak sistem dari prinsip getaran.
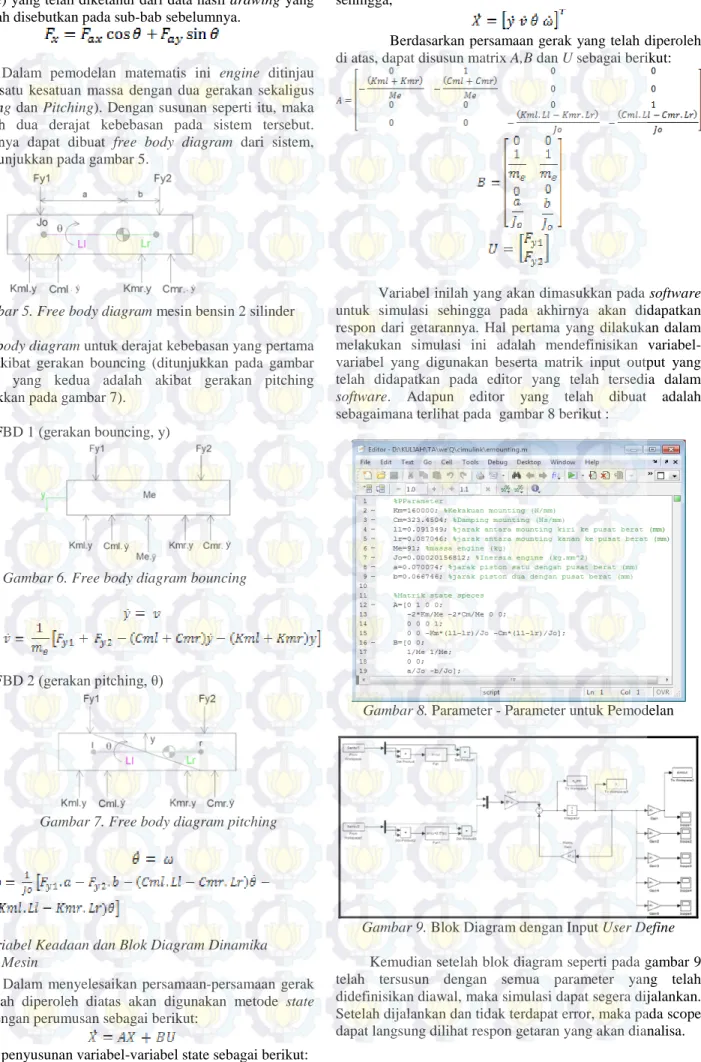
Analisa persamaan dinamika sistem akan dilakukan dengan menggunakan perumusan-perumusan dinamis pada analisa slider crank mechanism. Berikut ini contoh perhitungan gaya yang terjadi pada mounting (Fx) beserta free body diagram slider crank mechanism (gambar 4): [2]
Gambar 4. free body diagram slider crank mechanism
- mencari percepatan angular crankshaft ( ) dengan dan t yang telah diketahui .
- Mencari sudut β dengan menggunakan arc sin dari rumus berikut ini:
- mencari percepatan angular connecting rod ( ).
- mencari percepatan linier pusat massa connecting rod dalam arah x ( ) dan arah y ( ).
- Mencari gaya-gaya yang bekerja pada crankpin dengan merupakan gaya piston yang telah didapatkan dari perhitungan input pada sub-bab sebelumnya.
- Mencari (gaya yang akan digunakan pada persamaan gerak sistem) dengan diketahui nilai (momen inersia connecting rod) dan (massa connecting
sebagai satu kesatuan massa dengan dua gerakan sekaligus (Bouncing dan Pitching). Dengan susunan seperti itu, maka diperoleh dua derajat kebebasan pada sistem tersebut.
Selanjutnya dapat dibuat free body diagram dari sistem, yang ditunjukkan pada gambar 5.
Gambar 5. Free body diagram mesin bensin 2 silinder
Free body diagram untuk derajat kebebasan yang pertama adalah akibat gerakan bouncing (ditunjukkan pada gambar 6), dan yang kedua adalah akibat gerakan pitching (ditunjukkan pada gambar 7).
a. FBD 1 (gerakan bouncing, y)
Gambar 6. Free body diagram bouncing
b. FBD 2 (gerakan pitching, θ)
Gambar 7. Free body diagram pitching
C. Variabel Keadaan dan Blok Diagram Dinamika Struktur Mesin
Dalam menyelesaikan persamaan-persamaan gerak yang telah diperoleh diatas akan digunakan metode state space dengan perumusan sebagai berikut:
dengan penyusunan variabel-variabel state sebagai berikut:
Variabel inilah yang akan dimasukkan pada software untuk simulasi sehingga pada akhirnya akan didapatkan respon dari getarannya. Hal pertama yang dilakukan dalam melakukan simulasi ini adalah mendefinisikan variabel- variabel yang digunakan beserta matrik input output yang telah didapatkan pada editor yang telah tersedia dalam software. Adapun editor yang telah dibuat adalah sebagaimana terlihat pada gambar 8 berikut :
Gambar 8. Parameter - Parameter untuk Pemodelan
Gambar 9. Blok Diagram dengan Input User Define
Kemudian setelah blok diagram seperti pada gambar 9 telah tersusun dengan semua parameter yang telah didefinisikan diawal, maka simulasi dapat segera dijalankan.
Setelah dijalankan dan tidak terdapat error, maka pada scope dapat langsung dilihat respon getaran yang akan dianalisa.
VI. ANALISA GRAFIK
A. Respon Engine Terhadap Eksitasi Impulsif (Transient Respon)
Gambar 10. Respon Linear Displacement Engine
Gambar 11. Respon Angular Displacement Engine
Gambar 12. Respon Linear Velocity Engine
Gambar 13. Respon Angular Velocity Engine
Gambar 14. Respon Linear Acceleration Engine
Gambar 15. Respon Angular Acceleration Engine
Pada Grafik-Grafik diatas (gambar 10 sampai gambar 15) dapat diketahui bahwa dengan adanya eksitasi impuls yang terjadi pada sistem , respon engine telah stabil pada waktu yang relatif singkat, yakni dalam waktu kurang dari 0,5
detik. Selain itu juga dapat diketahui bahwa pada sistem ini respon engine yang angular (pitching) dan respon yang linear (bouncing) menunjukkan waktu kestabilan yang hampir sama, yakni kurang dari 0,5 detik dengan nilai respon engine angular lebih besar daripada respon yang linear (bouncing). Hal ini terjadi karena pada kondisi kerjanya, mesin bensin 2 silinder 650 cc dengan sudut engkol 90° ini menerima gaya yang diakibatkan oleh tekanan pada silinder ruang bakar pada waktu yang tidak bersamaan, dengan delay waktu 0,075 detik.
B. Respon Engine Terhadap Eksitasi Periodik (Steady State Respon)
Gambar 16. Displacement Bouncing, L1
Gambar 17. Displacement Pitching, L1
Dari grafik pada gambar 16 dan gambar 17 diatas dapat diketahui semakin besar kecepatan putaran semakin kecil range dari respon yang terjadi. Hal ini terjadi karena ketiga variasi kecepatan putaran (1000 rpm, 3000 rpm, 5000 rpm) telah melewati frekuaensi natural yang terjadi pada sistem, yakni pada nilai ωn = 59,28 rad/s atau sama dengan 566,37 rpm, sehingga dengan nilai damping ratio= 0,5 nilai respon getaran displacement yang terjadi pada engine akan terus menurun saat kecepatan putaran semakin besar.[1]
Pada gambar 16 dan gambar 17 juga dapat dilihat bahwa semakin panjang connecting rod semakin kecil nilai respon getaran yang terjadi. Dari grafik diatas juga menunjukkan bahwa respon getaran pitching mempunyai nilai yang lebih besar daripada respon getaran bouncing yang terjadi pada mesin tersebut. Hal ini terjadi karena memang pada kondisi kerjanya kedua silinder mendapat tekanan pada waktu yang berbeda (dengan delay waktu 0,075 s), sehingga mengakibatkan respon pitching yang lebih besar dibandingkan respon bouncingnya.
Gambar 18. Velocity Bouncing, L1
Gambar 19. Velocity Pitching, L1
Dapat dilihat pada grafik diatas (gambar 18 dan 19) bahwa fenomena yang terjadi pada grafik respon getaran berupa velocity ini hampir sama dengan displacement, bahwa semakin besar kecepatan putaran dan panjang connecting rod, maka respon getaran yang diberikan adalah semakin kecil. Dari perbandingan respon bouncing dan pitching pada velocity ini dapat diketahui bahwa kecepatan respon engine pada pitching jauh lebih besar dibandingkan respon bouncing. Selain itu dari perbandingan grafik respon kecepatan engine bouncing dan grafik respon kecepatan engine pitching diatas juga dapat dilihat bahwa pada respon bouncing kecepatan respon cenderung seimbang antara kecepatan keatas dan kebawah, sedangkan pada respon pitching kecepatan respon keatas cenderung lebih besar dari pada yang kebawah.
Gambar 20. Acceleration Bouncing, L1
Gambar 21. Acceleration Pitching, L1
Dari grafik diatas (gambar 20 dan 21) dapat diketahui bahwa semakin besar kecepatan putaran engine menyebabkan semakin besar pula respon percepatan yang terjadi pada engine. Hal ini sesuai dengan teori force transmissibility yang menyebutkan bahwa dengan nilai damping ratio = 0,5 didapatkan nilai force transmissibility yang semakin besar saat kecepatan putaran ditambah, dan besarnya gaya adalah berbanding lurus dengan besarnya percepatan. Dari perbandingan tersebut juga dapat diketahui bahwa nilai respon pitching jauh lebih besar dari pada nilai respon bouncing akibat adanya delay waktu antara silinder 1 dengan silinder 2 saat menerima tekanan. [4]
Gambar 22. Grafik RMS untuk Dispacement Bouncing
Gambar 23. Grafik RMS untuk Dispacement Pitching
Gambar 24. Grafik RMS untuk Velocity Bouncing
Gambar 25. Grafik RMS untuk Velocity Pitching
Pada grafik diatas (gambar 22 sampai gambar 25) dapat diketahui bahwa semakin bertambahnya RPM maka
respon yang terjadi pada engine akan semakin menurun, dengan variasi panjang connecting rod yang tidak begitu berpengaruh dengan adanya kurva diatas yang berimpit antara L1, L2, L3.
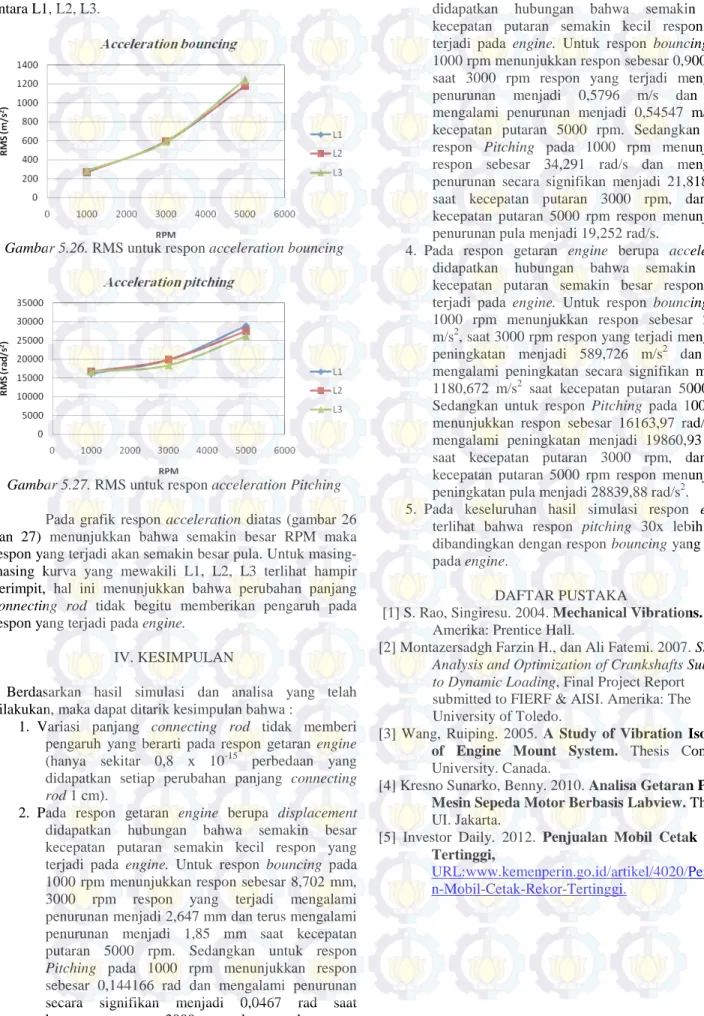
Gambar 5.26. RMS untuk respon acceleration bouncing
Gambar 5.27. RMS untuk respon acceleration Pitching
Pada grafik respon acceleration diatas (gambar 26 dan 27) menunjukkan bahwa semakin besar RPM maka respon yang terjadi akan semakin besar pula. Untuk masing- masing kurva yang mewakili L1, L2, L3 terlihat hampir berimpit, hal ini menunjukkan bahwa perubahan panjang connecting rod tidak begitu memberikan pengaruh pada respon yang terjadi pada engine.
IV. KESIMPULAN
Berdasarkan hasil simulasi dan analisa yang telah dilakukan, maka dapat ditarik kesimpulan bahwa :
1. Variasi panjang connecting rod tidak memberi pengaruh yang berarti pada respon getaran engine (hanya sekitar 0,8 x 10-15 perbedaan yang didapatkan setiap perubahan panjang connecting rod 1 cm).
2. Pada respon getaran engine berupa displacement didapatkan hubungan bahwa semakin besar kecepatan putaran semakin kecil respon yang terjadi pada engine. Untuk respon bouncing pada 1000 rpm menunjukkan respon sebesar 8,702 mm, 3000 rpm respon yang terjadi mengalami penurunan menjadi 2,647 mm dan terus mengalami penurunan menjadi 1,85 mm saat kecepatan putaran 5000 rpm. Sedangkan untuk respon Pitching pada 1000 rpm menunjukkan respon sebesar 0,144166 rad dan mengalami penurunan secara signifikan menjadi 0,0467 rad saat kecepatan putaran 3000 rpm, dan saat kecepatan
putaran 5000 rpm respon menunjukkan penurunan pula menjadi 0,4269 rad.
3. Pada respon getaran engine berupa velocity didapatkan hubungan bahwa semakin besar kecepatan putaran semakin kecil respon yang terjadi pada engine. Untuk respon bouncing pada 1000 rpm menunjukkan respon sebesar 0,9008 m/s, saat 3000 rpm respon yang terjadi mengalami penurunan menjadi 0,5796 m/s dan terus mengalami penurunan menjadi 0,54547 m/s saat kecepatan putaran 5000 rpm. Sedangkan untuk respon Pitching pada 1000 rpm menunjukkan respon sebesar 34,291 rad/s dan mengalami penurunan secara signifikan menjadi 21,818 rad/s saat kecepatan putaran 3000 rpm, dan saat kecepatan putaran 5000 rpm respon menunjukkan penurunan pula menjadi 19,252 rad/s.
4. Pada respon getaran engine berupa acceleration didapatkan hubungan bahwa semakin besar kecepatan putaran semakin besar respon yang terjadi pada engine. Untuk respon bouncing pada 1000 rpm menunjukkan respon sebesar 271,25 m/s2, saat 3000 rpm respon yang terjadi mengalami peningkatan menjadi 589,726 m/s2 dan terus mengalami peningkatan secara signifikan menjadi 1180,672 m/s2 saat kecepatan putaran 5000 rpm.
Sedangkan untuk respon Pitching pada 1000 rpm menunjukkan respon sebesar 16163,97 rad/s2 dan mengalami peningkatan menjadi 19860,93 rad/s2 saat kecepatan putaran 3000 rpm, dan saat kecepatan putaran 5000 rpm respon menunjukkan peningkatan pula menjadi 28839,88 rad/s2.
5. Pada keseluruhan hasil simulasi respon engine, terlihat bahwa respon pitching 30x lebih besar dibandingkan dengan respon bouncing yang terjadi pada engine.
DAFTAR PUSTAKA
[1] S. Rao, Singiresu. 2004. Mechanical Vibrations.
Amerika: Prentice Hall.
[2] Montazersadgh Farzin H., dan Ali Fatemi. 2007. Stress Analysis and Optimization of Crankshafts Subject to Dynamic Loading, Final Project Report submitted to FIERF & AISI. Amerika: The University of Toledo.
[3] Wang, Ruiping. 2005. A Study of Vibration Isolation of Engine Mount System. Thesis Concordia University. Canada.
[4] Kresno Sunarko, Benny. 2010. Analisa Getaran Pada Mesin Sepeda Motor Berbasis Labview. Thesis UI. Jakarta.
[5] Investor Daily. 2012. Penjualan Mobil Cetak Rekor Tertinggi,
URL:www.kemenperin.go.id/artikel/4020/Penjuala n-Mobil-Cetak-Rekor-Tertinggi.