Kegiatan Belajar 3 : Mengoperasikan Sistem Aktuator
a. Pendahuluan
Aktuator atau Penggerak adalah setiap alat yang mengubah sinyal listrik menjadi gerakan mekanis atau sistem. Aktuator diaktifkan dengan menggunakan lengan mekanis yang biasanya digerakkan oleh motor listrik, yang proses lanjutan dari keluaran suatu proses kendali oleh media pengontrol otomatis yang dihasilkan oleh suatu sensor atau kontroler. Pada instrumentasi aktuator sebagai output terakhir sebagai penerus perintah dari controller untuk melakukan tindakan eksekusi atau koreksi. Aktuator merupakan elemen yang mengkonversikan besaran listrik analog menjadi besaran lainnya missal kecepatan putaran dan merupakan perangkat elektromagnetikyang menghasilkan daya gerakkan. Untuk meningkatkan tenaga mekanik actuator ini dapat dipasang gearbox. Terdiri dari 3 jenis pokok : Berikut berbagai jenis aktuator sesuai dengan prinsip kerjanya yaitu:
- Aktuator listrik : Aktuator tenaga elektris, biasanya digunakan selenoid, motor arus searah (mesin DC). Sifat mudah diatur dengan torsi kecil sampai sedang.
- Aktuator hidraulik : Aktuator tenaga hidraulik, torsi yang besar konstruksinya sukar - Aktuator pneumatik : Aktuator tenaga pneumatik, sukar dikendalikan
b. Capaian Pembelajaran : Memahami Cara Mengoperasikan Sistem Aktuator
c. Sub Capaian Pembelajaran : Menjelaskan Cara Mengoperasikan Sistem Aktuator Elektromekanik.
d. Uraian Materi
Aktuator atau Penggerak adalah setiap alat yang mengubah sinyal listrik menjadi gerakan mekanis atau sistem. Aktuator diaktifkan dengan menggunakan lengan mekanis yang biasanya digerakkan oleh motor listrik, yang proses lanjutan dari keluaran suatu proses kendali oleh media pengontrol otomatis yang dihasilkan oleh suatu sensor atau kontroler.
Aktuator dalam perspektif kontrol dapat dikatakan sebagai : a. Aktuator : Pintu kendali ke sistem
Aktuator dapat berfungsi sebagai : 1. Penghasil gerakan
2. Gerakan rotasi dan translasi
3. Aktuator dalam simulasi cenderung linier 4. Aktuator riil cenderung non-linier
Jenis-jenis Tenaga Penggerak pada Aktuator 1. Aktuator elektrik
Aktuator yang mempunyai prinsip kerja mengubah
sinyal elektrik menjadi gerakan mekanik, Aktuator elektrik ini memiliki beberapa keunggulan yaitu mudah dalam pengontrolan, mulai dari Mw Sampai MW, berkecepatan tinggi 1000 – 10000 rpm, , akurasi tinggi, torsi ideal untuk pergerakan dan memiiliki efisiensi tinggi. Berikut macam-macam aktuator elektrik
Ø Solenoid.
Gambar Solenoid
Selenoid Valve
Gambar 1. Selenoid
Solenoid valve merupakan katup yang dikendalikan dengan arus listrik baik AC maupun DC melalui kumparan /selenoida. Solenoid valve ini merupakan elemen kontrol yang paling sering digunakan dalam sistem fluida. Seperti pada sistem pneumatik, sistem hidrolik ataupun pada sistem kontrol mesin yang membutuhkan elemen kontrol otomatis.Prinsip kerja dari solenoid valve/katup (valve) solenoida yaitu katup listrik yang mempunyai koil sebagai penggeraknya dimana ketika koil mendapat supply tegangan maka koil tersebut akan berubah menjadi medan magnet sehingga menggerakan plunger pada bagian dalamnya ketika plunger berpindah posisi maka pada lubang keluaran dari solenoid valve pneumatic akan keluar udara bertekanan yang berasal dari supply (service unit), pada umumnya solenoid valve pneumatic ini mempunyai tegangan kerja 100/200 VAC namun ada juga yang mempunyai tegangan kerja DC.
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah pulsa elektronis menjadi gerakan mekanis diskrit yang disebut step. Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Penggunaan motor stepper memiliki beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa.
Keunggulannya antara lain adalah :
• Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
• Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak • Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
• Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran)
• Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC
• Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke porosnya
• Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
Pada dasaranya terdapat 3 tipe motor stepper yaitu: 1. Motor stepper tipe Variable reluctance (VR)
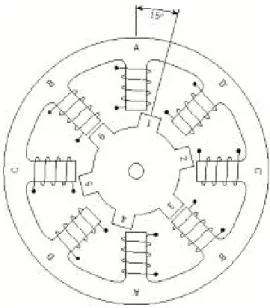
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara struktural paling mudah untuk dipahami. Tipe ini tidak memiliki magnet permanen sehingga dibutuhkan proses pengendalian tersendiri. Tipe ini biasanya dipergunakan dalam aplikasi berskala kecil misalnya mikroposisi.
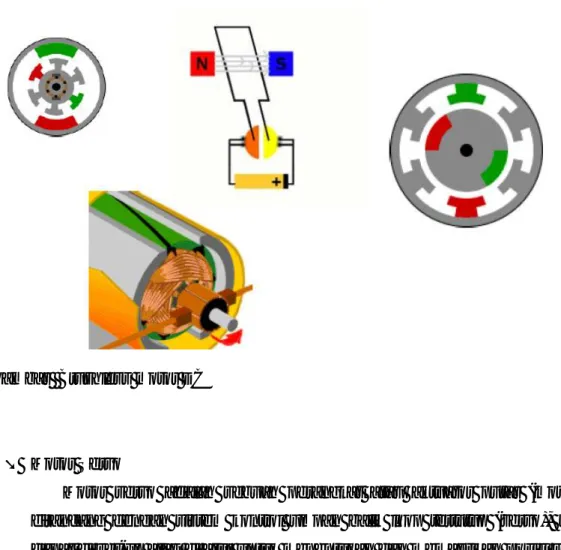
Gambar 2. Penampang melintang dari motor stepper tipe variable reluctance (VR)
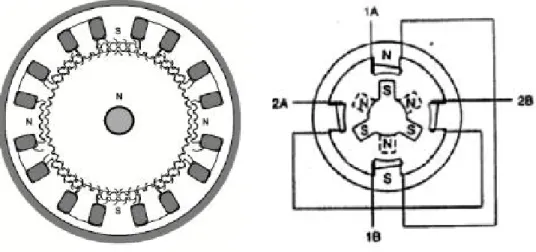
2. Motor stepper tipe Permanent Magnet (PM)
Gambar 3. Ilustrasi sederhana dari motor stepper tipe permanent magnet (PM)
3. Motor stepper tipe Hybrid (HB)
Gambar 3. Penampang melintang dari motor stepper tipe hybrid
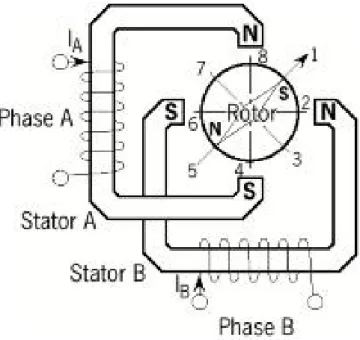
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat dibagi menjadi jenis unipolar dan bipolar. Rangkaian pengendali motor stepper unipolar lebih mudah dirancang karena hanya memerlukan satu switch / transistor setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan perhatikan gambar 4
Gambar 4. Motor stepper dengan lilitan unipolar
terminal lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan sebaliknya (perhatikan gambar 2.12). Karena itu dibutuhkan rangkaian pengendali yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar dalam hal torsi yang lebih besar untuk ukuran yang sama.
Gambar 5. Motor stepper dengan lilitan bipolar
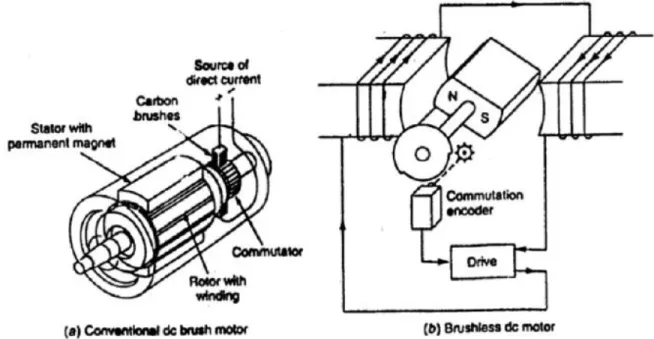
Ø Motor DC.
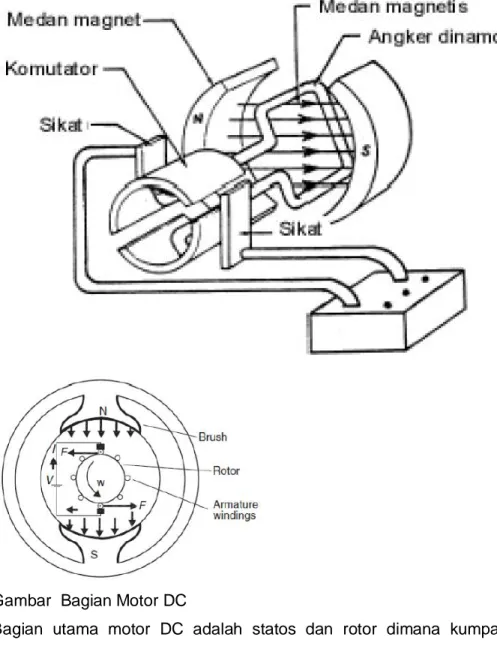
dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bias berputar bebas di antara kutub-kutub magnet permanen.
Gambar Bagian Motor DC
angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet. Sedangkan untuk prinsip kerja dari motor DC dapat dilihat pada gambar dibawah ini
Gambar Motor DC
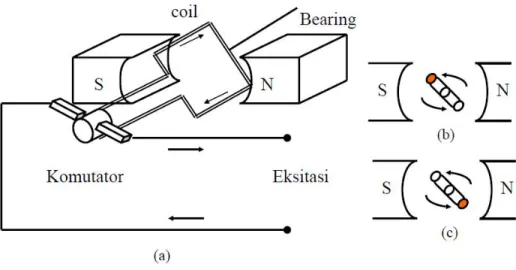
Rangkaian penguat medan yang menghasilkan medan magnet konstan melintang dari dua kutub. Diantara kutub terhubung suatu lilitan kawat yang dapat bebas berotasi dan terhubung ke sumber arus dc yang melewati switch yang ada pada shaft (commutator) seperti anda lihat pada gambar (a). Pada kondisi tersebut arus pada coil akan menghasilkan medan magnet dengan orientasi kutub utara/selatan seperti pada gambar (b). Tolakan dari medan magnet selatan dan coil selatan akan menyebabkan torsi yang akan memutar coil. Jika komutator tidak terbelah coil akan berputar sampai medan magnet dan coil utara dan kutub selatan sejajar, tetapi karena komutator dengan arah putaran arus melalui coil juga berubah maka dengan kondisi seperti pada gambar (c) torsi putar akan tetap ada dan coil akan terus berputar.
Ø Brushless DC-motors.
Gambar Brushless motor DC
Gambar Brushless motor DC
Ø Motor Servo
Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk beberapa keperluan tertentu, motor servo dapat dimodifikasi agar bergerak kontinyu. Pada robot, motor ini sering digunakan untuk bagian kaki, lengan atau bagianbagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi cukup besar. Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya. Motor Servo tampak pada gambar 1.
Gambar Sistem mekanik motor servo
Motor servo adalah motor yang berputar lambat, dimana biasanya ditunjukkan oleh rate putarannya yang lambat, namun demikian memiliki torsi yang kuat karena internal gearnya.
Lebih dalam dapat digambarkan bahwa sebuah motor servo memiliki : Ø 3 jalur kabel : power, ground, dan control
Ø Sinyal control mengendalikan posisi
Ø Konstruksi didalamnya meliputi internal gear, potensiometer, dan feedback control.
Jenis-Jenis Motor Servo Ø Motor Servo Standar 180°
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
Ø Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
Kegunaan Motor Servo
Kebanyakan motor servo digunakan sebagai : Ø Manipulators.
Ø Moving camera’s. Ø Robot arms.
Pensinyalan Motor Servo
Mode pensinyalan motor servo tampak pada gambar 9.
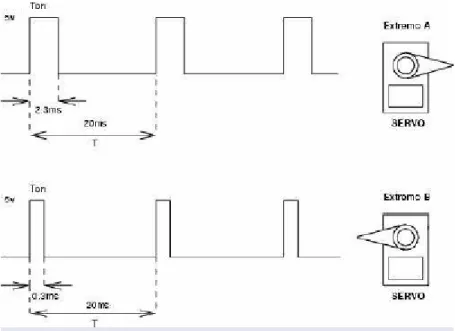
Contoh dimana bila diberikan pulsa dengan besar 1.5ms mencapai gerakan 90 derajat, maka bila kita berikan data kurang dari 1.5 ms maka posisi mendekati 0 derajat dan bila kita berikan data lebih dari 1.5 ms maka posisi mendekati 180 derajat. Contoh Posisi dan Waktu Pemberian Pulsa tampak pada gambar 10.
Gambar 10. Contoh Posisi dan Waktu Pemberian Pulsa
· Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50Hz.
· Dimana pada saat sinyal dengan frekuensi 50Hz tersebut dicapai pada kondisi Ton duty cycle 1.5ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0° / netral).
Bentuk-Bentuk Motor Servo tampak pada gambar 11.
Gambar 11. Bentuk-Bentuk Motor Servo Dimensi Motor Servo tampak pada gambar 12.
Gambar 13. Pin-Pin dan Pengkabelan Pada Motor Servo
Pengendalian Motor Servo
Pengendalian sebuah motor servo dengan menggunakan mikrokontroler : Ilustrasi pengendalian motor servo tampak pada gambar 14.
Driver motor DC Servo
Gambar 14. Pergerakan motor servo terhadap perubahan lebar pulsa
Keunggulan aktuator elektrik adalah sebagai berikut : Ø Mudah dalam pengontrolan
Ø Mulai dari mW sampai MW.
Ø Berkecepatan tinggi, 1000 – 10.000 rpm. Ø Banyak macamnya.
Ø Akurasi tinggi
Ø Torsi ideal untuk pergerakan. Ø Efisiensi tinggi.
2. Aktuator Pneumatic
Aktuator pneumatic adalah aktuator yang memanfaatkan udara bertekanan menjadi
Gambar 6. Aktuator Pneumatik
Gaya piston yang dihasilkan oleh silinder bergantung pada tekanan udara, diameter
silinder dan tahanan gesekan dari komponen perapat. Gaya piston secara teoritis dihitung menurut rumus berikut :
Aktuator pneumatik gerak lurus dibedakan menjadi 2: 1. Silinder Kerja Tunggal
Dengan memberikan udara bertekanan pada satu sisi permukaan piston, sisi yang lain terbuka ke atmosfir. Silinder hanya bisa memberikan gaya kerja ke satu arah . Gerakan piston kembali masuk diberikan oleh gaya pegas yang ada didalam silinder direncanakan hanya untuk mengembalikan silinder pada posisi awal dengan alasan agar kecepatan kembali tinggi pada kondisi tanpa beban.
2. Silinder Kerja Ganda
maka gaya diberikan pada sisi permukaan piston tersebut sehingga batang piston akan terdorong keluar sampai mencapai posisi maksimum dan berhenti. Gerakan silinder kembali masuk, diberikan oleh gaya pada sisi permukaan batang piston (arah mundur) dan sisi permukaan piston (arah maju) udaranya terbuka ke atmosfir.
Jika silinder harus menggerakkan massa yang besar, maka dipasang peredam di akhir langkah untuk mencegah benturan keras dan kerusakan silinder.
Aktuator pada Pneumatik Valve
Gambar berikut contoh dari sebuah actuator control valve: 1. Upper Diaphragm Case
2. Lower Diaphragm Case 3. Diaphragm
4. Spring. 5. Yoke
6. Travel Indicator 7. Actuator Stem 8. Signal Air Pressure
Prinsip kerja actuator tekanan sinyal pneumatic yang terakumulasi didalam ruang (diaphragm dan diaphragm case) menimbulkan gaya yang bekerja melawan pegas sehinga akan menggerakkan bagian stem untuk bergerak membuka atau menutup body valve. Karena konstruksinya, body valve akan menjadi terbuka dengan turunnya stem dan ada pula yang menjadi tertutup dengan turunnya stem.
Actuator Pneumatik Kerja Putar
Actuator pneumatik kerja putar contoh nya adalah motor aliran. Motor aliran hanya dapat dipakai untuk daya yang kecil. Tetapi jumlah putarannya sangat tinggi. Salah satu contoh aplikasi pneumatik kerja putar ada lah bor gigi.
Karakteristik motor pneumatik:
· Aman pada pembebanan lebih
· Tidak peka terhadap debu, air, panas, dingin. · Tidak akan meledak (aman terhadap ledakan). · Biaya pemeliharaan yang ringan.
· Arah putaran mudah dikendalikan. Daerah kecepatan yang bisa diatur lebar
3. Aktuator Hydraulic
Aktuator hydraulic merupakan aktuator yang memanfaatkan aliran fluida/oli bert ekanan menjadi gerakan mekanik. Sama seperti halnya pada sistem Pneumatik, akt uator hidrolik dapat berupa silinder tapi inputannya hydraulic.
Gambar 7. Aplikasi Penggunaan sistem hydraulic Kelebihan
Ø Fluida hidrolik bisa sebagai pelumas dan pendingin. Ø Dengan ukuran kecil dapat menghasilkan gaya/torsi besar Ø Mempunyai kecepatan tanggapan yang tinggi
Ø Dapat dioperasikan pada keadaan yang terputus-putus Ø Kebocoran rendah
Kekurangan
Ø Daya hidrolika tidak siap tersedia dibanding dengan daya listrik Ø Biaya sistem lebih mahal
Ø Bahaya api dan ledakan ada Ø Sistem cenderung kotor
Ø Mempunyai karakteristik redaman yang rendah
Rangkuman
Selamat, anda telah menyelesaikan kegiatan pembelajaran memahami mengoperasikan sistem Aktuator, dengan mempelajari kegiatan pembelajaran ini anda telah menguasai bagaimana cara mengoperasikan aktuator. Hal – Hal penting yang telah anda pelajari dapat dirangkum sebagai berikut :
1. Aktuator sebuah peralatan mekanis untuk menggerakan atau mengontrol sebuah mekanisme atau sIstem. berfungsi untuk menguatkan sinyal kontrol yang berasal dari kontroler menjadi sinyal baru dengan daya yang besar dan sesuai dengan daya yang dibutuhkan oleh plant.
2. Berdasarkan daya yang dihasilkan, aktuator dapat diklasifikasikan menjadi aktuator elektrik, aktuator mekanik, aktuator pneumatik dan aktuator hidrolik
3. Aktuator pneumatic adalah aktuator yang memanfaatkan udara bertekanan menjadi gerakan mekanik. Sedangkan Aktuator hidrolik merupakan aktuator yang memanfaatkan aliran fluida/oli bertekanan menjadi gerakan mekanik
Penilaian
Pilihlah salah satu jawaban yang paling sesuai dengan kemampuan Saudara berdasarkan kriteria penilaian berikut ini:
Skor 4 : tingkat kemampuan yang dicapai 90%-100% Skor 3 : tingkat kemampuan yang dicapai 80%-89% Skor 2 : tingkat kemampuan yang dicapai 70%-79% Skor 1 : tingkat kemampuan yang dicapai ≥ 69%
Saya sudah menguasai materi pembelajaran on line tentang karakteristik dan kesulitan belajar peserta didik
a. Telah menyelesaikan kegiatan belajar 3 dengan benar
d. Belum menyelesaikan kegiatan belajar 3
Tugas
Jangkar sebuah motor DC tegangan 230 volt dengan tahanan 0.312 ohm dan mengambil arus 48 A ketika dioperasikan pada beban normal.
a. Hitunglah GGL lawan (Ea) dan daya yang timbul pada jangkar.
b. Jika tahanan jangkar 0.417 ohm, keadaan yang lain sama. Berapa GGL lawan (Ea) dan daya yang timbul pada jangkar. Penurunan tegangan pada sikat-sikat sebesar 2 volt untuk soal a dan b.
Tugas Formatif
1. Salah satu jenis aktuator putar yang dirancang dengan sistem kontrol umpan balik loop tertutup adalah
A. Motor Stepper B. Motor DC C. Motor servo D. Brushless motor DC
2. Perhatikan gambar dibawah ini dengan baik
Yang merupakan bagian dari solenoid adalah A. 1. dan 4
E. 2 dan 5
3. Berdasarkan gambar pada no 1 , solenoid merupakan peralatan yang mengubah sinyal elektrik menjadi gerakan linear, bagian yang memberikan dorongan terletak pada nomor
A. 1 B. 2 C. 3 D. 4 E. 5
4. Motor stepper memiliki beberapa keunggulan, yang tidak termasuk adalah
A. Motor dapat langsung memberikan torsi penuh pada setelah mulai bergerak B. Posisi dan pergerakan linear dapat ditentukan secara akurat
C. Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran) D. Sangat realibel karena adanya sikat yang bersentuhan dengan rotor seperti pada
motor DC
E. Dapat menghasilkan perputaran yang cepat sehingga beban dapat dikopel langsung ke porosnya
5. Jenis motor stepper yang cocok diterapkan pada peralatan komputer adalah A. Motor stepper tipe hybrid
B. Motor stepper tipe Variabel reluctance
C. Motor stepper tipe permanent dan variabel reluctance D. Motor stepper tipe permanent magnet
E. Motor stepper dengan lilitan unipolar
Catu tegangan DC dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, Komutator ditunjukkan oleh nomor
A. 1 B. 2 C. 3 D. 4 E. 5
7. Bagian manakah yang merupakan komponen yang berputar di antara medan magnet A. 1
B. 2 C. 3 D. 4 E. 5
8. Atuator elektrik memiliki beberapa keunggulan, manakah dari pilihan dibawah ini yang tidak termasuk
A. Mudah dalam pengontrolan B. Mulai dari mW sampai MW. C. Berkecepatan sedang D. Banyak macamnya
E. Torsi ideal untuk pergerakan.
9. Ciri khas dari aktuator peneumatik dengan silinder kerja tunggal adalah A. Tidak mempunyai pegas pengembali
B. Silinder hanya bisa memberikan gaya kerja ke satu arah
C. Gerakan piston kembali masuk diberikan oleh gaya pegas yang ada di luar silinder D. Gerakan silinder kembali masuk, diberikan oleh gaya pada sisi permukaan batang
piston (arah mundur)
E. Direncanakan hanya untuk mengembalikan silinder pada posisi awal
10. Kharakteritik dari motor pneumatik adalah
A. Pengaturan kecepatan dan momen putar yang stabil dan sinkron B. Dimensinya kecil, dan ringan.
D. Peka terhadap debu, air, panas, dingin. E. Biaya pemeliharaan yang ringan.
Kunci Jawaban 1. C 2. B 3. B 4. C 5. D 6. B 7. E 8. C 9. B 10. B Daftar Pustaka
Zuhal, Dasar Teknik Tenaga Listrik dan Elektronika Daya. Jakarta: Gramedia, 1988 Sumanto, Mesin Arus Searah. Jogjakarta: Penerbit ANDI OFFSET, 1994