INTISARI
Penelitian ini menghasilkan sebuah aplikasi pengaturan kecepatan kipas AC dengan menggunakan ucapan untuk mengatur kecepatan putaran kipas angin AC. Penelitian ini membantu manusia agar dapat dengan mudah menghidupkan kipas dan mengatur kecepatan kipas angin dengan ucapan.
Ucapan “hidup”, “lambat”, “cepat” dan “mati” digunakan untuk mengatur keadaan putaran kipas angin AC. Proses pengenalan ucapan dimulai dari perekaman pengenalan ucapan, Pre-processing (normalisasi, pemotongan sinyal, windowing dan zero padding), ekstraksi ciri, fungsi jarak divergensi, penentuan keluaran menggunakan metode k-Nearest Neighbor dan data hasil pengenalan ucapan dikirim secara serial ke hardware. Sistem yang dijalankan pada hardware melalui beberapa proses yaitu modul K 125 R, , ATMega 8535, Penguat Arus, rangkaian penggerak kipas, ATMega 8535. Proses tersebut merupakan sistem kendali utama di hardware untuk menggerakan kipas angin AC.
Hasil pengenalan dan pengujian ucapan secara tidak real time dengan menggunakan batas potong 0,2, segment averaging 128 dan k-nearest neighbor 7 menghasilkan tingkat pengenalan terbaik yaitu 81,6 %. Dari data pengujian tidak real time dapat dilakukan pengambilan data secara real time dengan hasil pengenalan ucapan user mencapai 85,8 %. Hasil pengenalan ucapan tersebut menghasilkan putaran kipas dari 43,6 rpm – 2275,1 rpm.
ABSTRACT
This research is to produce an application speed controling of AC fan by using speech to set the pace lap AC fan. This study help a man so as to be easily switch on a fan and set the pace a fan with utterance
Speech of “hidup”, “lambat”, “cepat”, and “mati” used to speed controling of AC fan. The process of the introduction of speech starts from recording the introduction of speech , pre-processing (normalization, cutting a signal, windowing and zero padding), the features extraction, divergence distance function, The determination of output using methods k-Nearest Neighbor and The introduction of the hardware sent in a series. The system that run on hardware through several processes that is module K 125 R, ATMega 8535, current amplifier, The series of fan drive, Atmega 8535. The process is a system of control in key hardware to move the AC fan.
The results of the application of speech and test in no real time by the use of The limit cut 0,2, segment averaging 128 dan K-Nearest Neighbor 7 generate a level of the introduction of best namely 81,6 %. Not the real time data from testing the data can be done in real time with the results of the introduction of users reached 85,6 % of speech. The results of the introduction of the speechs yield the rotation fan than 43,6 rpm - 2275,1 rpm
i
TUGAS AKHIR
APLIKASI PENGENALAN UCAPAN DENGAN EKSTRAKSI CIRI
DCT DAN FUNGSI JARAK DIVERGENSI UNTUK MENGATUR
KECEPATAN KIPAS ANGIN AC
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
HENRY JUAN NDOLU
NIM : 105114016
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
APPLICATION OF SPEECH RECOGNITION USING DCT FEATURE
EXTRACTION AND DIVERGENCE DISTANCE FUNCTION FOR
SPEED CONTROLLING OF AC FAN
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
HENRY JUAN DOLU
NIM : 105114016
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
Skripsi ini saya persembahkan untuk:
Tuhan Yesus yang telah setia menjaga , menyertai dan melindungi saya dalam situasi dan kondisi apapun
Bapak,Mama,Nita,Esti,Ariesto dan semua keluarga yang selalu mendoakan, menasehati, mendukung, menyemangati dan menasehati tanpa henti
Elektro ’10, teman seperjuangan yang selalu mendukung dan menyemangati
Teman, di jogja, Komisi Pemuda dan Mutimedia GKI Gejayan, spesial dan dimanapun beraada yang selalu memberi doa dan semangat
Dan Semua pihak yang mendukung
MOTTO :
“Tuhan menetapkan langkah
-langkah orang yang hidupnya berkenan
kepada-Nya;
apabila ia jatuh, tidaklah sampai tergeletak, sebab TUHAN menopang
tangannya”
viii
INTISARI
Penelitian ini menghasilkan sebuah aplikasi pengaturan kecepatan kipas AC dengan menggunakan ucapan untuk mengatur kecepatan putaran kipas angin AC. Penelitian ini membantu manusia agar dapat dengan mudah menghidupkan kipas dan mengatur kecepatan kipas angin dengan ucapan.
Ucapan “hidup”, “lambat”, “cepat” dan “mati” digunakan untuk mengatur keadaan putaran kipas angin AC. Proses pengenalan ucapan dimulai dari perekaman pengenalan ucapan, Pre-processing (normalisasi, pemotongan sinyal, windowing dan zero padding), ekstraksi ciri, fungsi jarak divergensi, penentuan keluaran menggunakan metode k-Nearest Neighbor dan data hasil pengenalan ucapan dikirim secara serial ke hardware. Sistem yang dijalankan pada hardware melalui beberapa proses yaitu modul K 125 R, , ATMega 8535, Penguat Arus, rangkaian penggerak kipas, ATMega 8535. Proses tersebut merupakan sistem kendali utama di hardware untuk menggerakan kipas angin AC.
Hasil pengenalan dan pengujian ucapan secara tidak real time dengan menggunakan batas potong 0,2, segment averaging 128 dan k-nearest neighbor 7 menghasilkan tingkat pengenalan terbaik yaitu 81,6 %. Dari data pengujian tidak real time dapat dilakukan pengambilan data secara real time dengan hasil pengenalan ucapan user mencapai 85,8 %. Hasil pengenalan ucapan tersebut menghasilkan putaran kipas dari 43,6 rpm – 2275,1 rpm.
ix
ABSTRACT
This research is to produce an application speed controling of AC fan by using speech to set the pace lap AC fan. This study help a man so as to be easily switch on a fan and set the pace a fan with utterance
Speech of “hidup”, “lambat”, “cepat”, and “mati” used to speed controling of AC fan. The process of the introduction of speech starts from recording the introduction of speech , pre-processing (normalization, cutting a signal, windowing and zero padding), the features extraction, divergence distance function, The determination of output using methods k-Nearest Neighbor and The introduction of the hardware sent in a series. The system that run on hardware through several processes that is module K 125 R, ATMega 8535, current amplifier, The series of fan drive, Atmega 8535. The process is a system of control in key hardware to move the AC fan.
The results of the application of speech and test in no real time by the use of The limit cut 0,2, segment averaging 128 dan K-Nearest Neighbor 7 generate a level of the introduction of best namely 81,6 %. Not the real time data from testing the data can be done in real time with the results of the introduction of users reached 85,6 % of speech. The results of the introduction of the speechs yield the rotation fan than 43,6 rpm - 2275,1 rpm
x
KATA PENGANTAR
Syukur kepada Tuhan Yesus Kristus karena telah memberikan rahmat dan penyertaan-Nya sehingga tugas akhir dengan judul “Aplikasi Pengenalan Ucapan Dengan Ekstraksi Ciri DCT Dan Fungsi Jarak Divergensi Untuk Mengatur Kecepatan Kipas Angin AC” dapat diselesaikan dengan baik.
Tugas akhir ini dapat diselesaikan dengan bantuan banyak pihak. Oleh karena itu penulis ingin mengucapkan terima kasih kepada:
1. Petrus Setyo Prabowo, S.T.,M.T., Ketua Program Studi Teknik Elektro Universitas Sanata Dharma.
2. Dr. Linggo Sumarno, dosen pembimbing yang dengan penuh setia, kesabaran dan pengertian untuk membimbing dalam menyelesaikan tugas akhir ini. 3. Bapak Martanto, S.T.,M.T. dan Bapak Pius Yozy Merucahyo, S.T.,M.T. dosen
penguji yang telah bersedia memberi masukan, bimbingan dan saran dalam memperbaiki tugas akhir ini
4. Bapak dan Ibu dosen yang telah yang telah memberikan ilmu dan pengetahuan kepada penulis selama masa kuliah.
5. Segenap laboran dan karyawan Fakultas Sains dan Teknologi yang telah memberikan dukungan secara tidak langsung selama penulis mengerjakan tugas akhir ini.
6. Kedua orang tua, adek-adek dan semua keluarga yang telah banyak memberikan semangat, dukungan doa, kasih sayang dan motivasi selama mengerjakan tugas akhir dan menempuh pendidikan di Universitas Sanata Dharma.
7. Teman–teman seperjuangan Teknik Elektro 2010 yang telah memberikan semangat dalam mengerjakan tugas akhir ini dan menempuh pendidikan di Universitas Sanata Dhama.
8. Teman-teman serta pembina Komisi Pemuda dan Multimedia GKI Gejayan yang memberi semangat, dukungan doa, motivasi selama mengerjakan tugas akhir dan menempuh pendidikan di Universitas Sanata Dharma.
xii
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL ... xix
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penelitian ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 2
BAB II DASAR TEORI ... 5
2.1. Ucapan/Suara ... 5
2.2. Mikrofon ... 6
2.3. Kartu suara (Sound Card) ... 6
2.4. Matlab ... 7
2.4.1 Windowing utama matlab ... 8
2.4.2 Comand window ... 8
xiii
2.5. Sampling ... 9
2.6. Windowing ... 9
2.6.1 Hamming ... 10
2.7. Discrete Cosine Transform (DCT) ... 10
2.8. Fungsi Jarak Divergensi ... 11
2.9. Metode Template Matching ... 12
2.10. Metode k-nearest neighbor ... 12
2.11. Modul Serial (K 125 R) ... 13
2.12. Mikrokontroler ATMega 8535 ... 13
2.12.1. Arsitektur ATMega 8535 ... 14
2.13. Penguat Arus ... 15
2.14. Triac ... 16
2.15. Relay ... 17
2.16. Rangkaian Pengendali Fase ... 18
2.16.1 Hubungan Arus dan Tegangan Sinyal Sinusoida di R dan C ... 18
2.16.2 Hubungan Seri RLC ... 19
2.17. Regulator Tegangan ... 20
2.17.1 Pengaturan Tegangan IC 78XX ... 20
BAB III PERANCANGAN PENELITIAN ... 24
3.1. Gambaran Umum Perancangan Alat ... 23
3.2. Perancangan Software, Proses Pengenalan dan Kerja Sistem ... 26
3.2.1 Perancangan Proses Pengenalan Ucapan ... 26
3.2.2 Pre-processing ... 28
a. Normalisasi ... 39
b. Pemotongan Sinyal ... 30
c. Windowing ... 30
d. Zero Padding ... 31
3.2.3 Ekstraksi Ciri ... 32
3.2.4 Pembanding (Jarak Divergensi) ... 33
3.2.5 Perancangan Penentuan Keluaran ... 34
3.2.6 Perancangan Pengiriman Pengenalan Ucapan ... 35
xiv
3.4. Perancangan Ucapan Uji ... 37
3.5. Perancangan Tampilan GUI Matlab ... 37
3.6. Perancangan Hardware Pengaturan Kipas AC ... 39
3.6.1 Masukan (input) ... 39
3.6.2 Perancangan Mikrokontroler ATMega 8535 ... 40
3.6.3 Perancangan ULN 2803 ... 41
3.6.4 Perancangan Keadaan Kipas AC ... 41
3.6.4 Perancangan Keadaan Kipas AC ... 42
3.6.5 Rangkaian Relay ... 43
3.6.6 Rangkaian Penggerak Kipas ... 44
3.6.7 Perancangan Catu Daya ... 47
BAB IV HASIL DAN PEMBAHASAN ... 49
4.1. Pengujian Program Pengenalan Ucapan dengan Ekstraksi Ciri DCT dan Pembanding (jarak divergensi) ... 49
4.1.1. Pop up menu 1 ”VARIABEL BATAS POTONG” , Pop up menu 2 “SEGMENT AVERAGING”, Pop up menu 3 “KNN” dan Pop up menu 7 “USER” ... 52
4.1.2. Pushbutton 1 Tombol “REKAM” ... 55
4.1.3. Tombol “RESET” ... 66
4.1.4. Tombol “KELUAR” ... 66
4.2. Pengujian Program Pengenalan Ucapan terhadap Tingkat Pengenalan Ucapan user Secara Real Time Dan Tidak Real Time ... 67
4.2.1. Pengurangan Jumlah Elemen Koefisien Ekstraksi Ciri ... 67
4.2.2. Pengujian Tidak Real Time ... 70
4.2.3. Pengujian Real Time ... 78
4.3. Gambaran Fisik Alat (Hardware) ... 81
4.3.1 Subsistem Elektronik ... 82
4.4. Pengujian Alat (Hardware) ... 86
4.4.1 Pengujian Rangkaian Catu Daya ... 86
xv
BAB V KESIMPULAN DAN SARAN ... 91
5.1. Kesimpulan ... 91
5.2. Saran ... 91
DAFTAR PUSTAKA ... 92
LAMPIRAN A ... L1
LAMPIRAN B ... L7
LAMPIRAN C ... L9
LAMPIRAN D... L15
LAMPIRAN E ... L16
LAMPIRAN F ... L17
LAMPIRAN G ... L45
xvi
DAFTAR GAMBAR
1.1 Blok diagram model perancangan ... 3
2.1 Ucapan ... 5
2.2 Bentuk fisik mikrofon ... 6
2.3 Kartu suara (Sound Card) ... 7
2.4 Window utama matlab ... 8
2.5 Comand Window ... 8
2.6 Window Editor ... 9
2.7 Spektrum dengan window Hamming ... 10
2.8 Contoh DCT Dari Sinyal Dengan Menggunakan DCT 256 Titik ... 11
2.9 Bentuk fisik modul serial (K125 R) ... 12
2.10 Bentuk fisik port ISP ... 13
2.11 Bentuk fisik mikrokontroler ATMega 8535 ... 14
2.12 Konfigurasi Pin ATMega 8535 ... 14
2.13 Bentuk fisik ULN 2803 ... 15
2.14 Bentuk Schematik ULN 2803 ... 16
2.15 Simbol Triac dan rangkaian ekuivalen Triac ... 16
2.16 Normally Close ... 17
2.17 Normally Open ... 17
2.18 Rangkaian (a) Resistor (b) Kapasitor ... 18
2.19 Rangkaian RLC seri ... 19
2.20 Rangkaian dasar regulator 78XX ... 21
3.1 Gambaran umum system kerja alat ... 23
3.2 Diagram blok proses sistem pengenalan ... 26
3.3 Diagram alir proses pencuplikan ucapan ... 27
3.4 Diagram alir proses pre-processing ... 28
3.5 Diagram alir proses normalisasi ... 39
3.6 Diagram alir proses pemotongan sinyal ... 30
3.7 Diagram alir proses windowing ... 31
3.8 Diagaram alir proses zero padding ... 32
3.9 Diagram alir proses ekstraksi ciri ... 32
xvii
3.11 Diagram alir proses penentuan keluaran ... 34
3.12 Diagram alir pengiriman serial ... 36
3.13 Diagram blok proses pengambilan referensi ucapan ... 37
3.14 Tampilan GUI Matlab pengenalan ucapan untuk pengaturan kipas AC ... 38
3.15 Diagram Blok Perangkat Keras ... 39
3.16 Rangkaian ATMega 8535 ... 40
3.17 Rangkaian ULN 2803 ... 41
3.18 Diagram alir pengaturan putaran keadaan kipas AC pada mikrokontroler ... 42
3.19 Rangkaian Relay ... 43
3.20 Rangkaian Penggerak Kipas AC ... 44
3.21 Rangkaian catu daya 12 volt dan 5 volt ... 47
4.1 Simbol Matlab ... 49
4.2 Tampilan awal matlab ... 50
4.3 Tampilan Utama GUI setelah enter ... 51
4.4 Tampilan Utama GUI ... 51
4.5 Listing program Pop up menu 1 ... 53
4.6 Listing program “SEGMENT AVERAGING” ... 53
4.7 Listing program “KNN” ... 54
4.8 Listing program “USER” ... 55
4.9 Listing program “REKAM”... 55
4.10 Listing program ekstraksi ciri DCT ... 56
4.11 Listing program pemanggilan database ... 57
4.12 Listing program pembuatan database ... 63
4.13 Listing program perhitungan fungsi k-nearest neighbor ... 64
4.14 Listing program pengiriman data serial ke mikrokontroler ... 65
4.15 Listing program tombol “RESET” ... 66
4.16 Listing program tombol “KELUAR” ... 67
4.17 Listing program segment averaging ... 68
4.18 Pengaruh nilai batas potong tanpa segment averaging terhadap pengenalan ucapan . 69 4.19 Pengaruh nilai k-nearest neighbor tanpa segment averaging terhadap pengenalan ucapan ... 69
xviii
4.21 Pengaruh perubahan nilai batas potong tanpa menggunakan k-nearest neighoar
(K=1) terhadap ucapan ... 72
4.22 Pengaruh perubahan nilai batas potong menggunakan k-nearest neighbor (k=3) terhadap ucapan ... 73
4.23 Pengaruh perubahan segment averaging menggunakan k-nearest neighbor (K=3) terhadap ucapan ... 74
4.24 Pengaruh perubahan nilai batas potong menggunakan k-nearest neighbor (K=5) terhadap ucapan ... 75
4.25 Pengaruh perubahan segment averaging menggunakan k-nearest neighbor (K=5) terhadap ucapan ... 76
4.26 Pengaruh perubahan nilai batas potong menggunakan k-nearest neighbor (K=7) terhadap ucapan ... 77
4.27 Pengaruh perubahan nilai segment averaging menggunakan k-nearest neighbor (K=7) terhadap ucapan ... 77
4.28 Bentuk fisik alat ... 80
4.29 Terminal AC dan Saklar on-off ... 81
4.30 Tampak bagian dalam kotak ... 82
4.31 Rangkaian catu daya 5 volt dan 12 volt ... 83
4.32 Rangkaian minimum sistem mikrokontroler ... 84
4.33 Modul serial (K 125 R) ... 85
4.34 Rangakaian relay dan rangkaian penggerak ... 85
xix
DAFTAR TABEL
2.1 Tipe IC 78XX ... 20
3.1 Spesifikasi Mikrofon Genius ... 24
3.2 Tabel Pengenalan Pada Mikrokontroler ... 35
3.3 Keterangan Tampilan Utama GUI Matlab ... 38
3.4 Konfigurasi Pin Mikrokontroler ... 40
3.5 Tabel Keadaan Kipas AC ... 41
3.6 Keluaran Variabel B ... 43
3.7 Pengukuran Kipas ... 45
4.1 Tabel Pengenalan pada Mikrokontroler ... 66
4.2 Hasil Tingkat Pengenalan terbaik setelah Pembagian Data Awal dengan menggunakan segment averaging ... 68
4.3 Tingkat Pengenalan (%) Untuk Hasil Nilai Batas Potong dan K-Nearest Neighbor Tanpa Menggunakan segment averaging ... 68
4.4 Tingkat Pengenalan (%) Untuk Hasil Nilai Batas Potong dan segment averaging tanpa menggunakan K-Nearest Neighbor ... 71
4.5 Tingkat Pengenalan (%) Untuk Hasil Nilai Batas Potong dan segment averaging menggunakan K-Nearest Neighbor (K=3) ... 73
4.6 Tingkat Pengenalan (%) Untuk Hasil Nilai Batas Potong dan segment averaging menggunakan K-Nearest Neighbor (K=5) ... 75
4.7 Tingkat Pengenalan (%) Untuk Hasil Nilai Batas Potong dan segment averaging menggunakan K-Nearest Neighbor (K=7) ... 76
4.8 Percobaan Real time user 1 ... 79
4.9 Percobaan Real time user 2 ... 79
4.10 Percobaan Real time user 3 ... 79
4.11 Percobaan Pengenlan Secara Real Time Dari Masing-Masing User ... 80
4.12 Hasil Perbandingan Keluaran Tegangan Catu Daya ... 87
4.13 Data Hasil Pengujian Secara Tidak Real Time Pada Mikrokontroler ... 88
4.14 Data Hasil Pengujian Kecepatan Putaran Kipas Secara Real Time ... 89
xx
1
BAB I
PENDAHULUAN
1.1
Latar Belakang
Seiring dengan berjalannya waktu, kini bumi mengalami suatu perubahan iklim yaitu terjadinya Pemanasan Global. Pemanasan Global adalah kenaikan suhu permukaan bumi yang disebabkan oleh peningkatan emisi karbon dioksida dan gas-gas lain yang dikenal sebagai gas rumah kaca yang menyelimuti bumi dan memerangkap panas[1]. Dampak dari Pemanasan Global yang terjadi pada saat ini menyebabkan suhu di bumi menjadi lebih panas, hal ini sangat mengganggu kegiatan dan aktivitas manusia[2]. Akibat dari suhu udara yang panas ini sangat mengganggu kegiatan dan aktivitas manusia di dalam atau luar ruangan. Pada saat ini manusia selalu mencari ide baru untuk mengurangi suhu panas di dalam atau luar ruangan yang terjadi akibat dari Pemanasan Global. Untuk mengurangi suhu panas maka dibuat alat atau kipas yang dapat dikendalikan secara otomatis dengan menggunakan ucapan. Kipas juga merupakan alat yang menghasilkan angin, fungsi umumnya adalah untuk pendingin udara, penyegar udara atau pengering.[3]
Berdasarkan penjelasan di atas maka penulis ingin membuat alat dengan memanfaatkan ilmu yang telah penulis pelajari di Teknik Elektro yaitu aplikasi pengenalan ucapan dengan ekstraksi ciri DCT dan pembanding (jarak divergensi) untuk mengatur kecepatan kipas angin AC. Alat ini dapat dikendalikan secara otomatis dengan menggunakan ucapan hidup, lambat, cepat dan mati. Hasil putaran kecepatan kipas berupa hidup, lambat, cepat dan mati. Alat ini dapat mengganti pengoperasian kipas yang sekarang banyak dilakukan secara manual. Dengan alat ini pengguna secara otomatis dapat menghidupkan kipas, mengatur kecepatan kipas maupun mematikannya.
Dimana Mikrokontroler ATMega8535 yang akan mengontrol kecepatan putaran kipas angin AC.
1.2
Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah menghasilkan atau menciptakan sebuah aplikasi pengaturan kecepatan kipas AC dengan menggunakan ucapan. Manfaat dari penelitian ini adalah membantu manusia agar dapat dengan mudah menghidupkan kipas dan mengatur kecepatan kipas angin dengan menggunakan ucapan.
1.3
Batasan Masalah
Batasan masalah dalam penelitian ini adalah :
a. Sistem pengenalan ucapan untuk Pengatur kecepatan kipas menggunakan hardware dan software
b. Menggunakan hardware untuk mendapat masukan (input) dan mengolah keluaran (output)
c. Menggunakan software untuk proses masukan (input) dan keluaran (output) d. Jarak antara user dan mikrofon ± 10 cm
e. Menggunakan ekstraksi ciri DCT dan pembanding (jarak divergensi) f. Menggunakan mikrokontroler AVR ATMega 8535
g. Menggunakan Code vision AVR untuk program mikrokontroler h. Menggunakan Matlab untuk pengenalan ucapan
i.
Ucapan yang dikenali untuk menggerakan kipas adalah ucapan hidup, lambat, cepat, dan matij.
Menggunakan ucapan dari tiga user untuk menggerakkan kipas.1.4
Metodologi Penelitian
Langkah-langkah dalam mengerjakan tugas akhir ini adalah
a. Pengumpulan bahan-bahan referensi berupa buku-buku dan artikel serta referensi dari internet berupa jurnal-jurnal.
b. Perancangan subsistem software dan hardware. Tahap ini bertujuan untuk
telah ditentukan. Gambar 1.1. memperlihatkan blok diagram model yang akan dirancang.
Gambar 1.1. Blok diagram model perancangan
c. Secara garis besar gambar 1.1 blok diagram model perancangan diatas menunjukan bagian perangkat keras dan perangkat lunak. Sistem dari blok diagram model perancangan akan bekerja ketika menerima masukan ucapan manusia menggunakan mikrofon yang akan diproses di-souncard menggunakan matlab. Kemudian diserialkan menggunakan modul K 125 R ke mikrokontroler ATMega 8535. Setelah itu mikrokontroler akan mengontrol relay yang sebelumnya dikuatkan oleh penguat arus untuk menggerakan relay secara bergantian. Relay ini selanjutnya akan terangkai dengan rangkaian kendali kipas. d. Pengujian sistem. Setelah mendapatkan ukuran batas potong, segment averaging
dan k-nearest neighbor (KNN) yang menghasilkan tingkat pengenalan yang terbaik secara tidak real time maka selanjutnya akan dilakukan pengujian secara real time. Pengujian secara tidak real time dilakukan terhadap 120 ucapan dari tiga orang user. Setiap ucapan dari masing-masing user akan diuji sebanyak 10 kali. Hal ini diharapkan bisa merepresentasikan tingkat pengenalan ucapan yang dilakukan secara tidak real time dan real time.
e. Proses pengambilan data pada software. Cara pengambilan data dilakukan dengan cara mengambil data secara tidak real time dari batas potong, segment averaging dan k-nearest neighbor (KNN) yang menghasilkan tingkat pengenalan yang terbaik. Data hasil pengenalan ucapan terbaik dipakai untuk mengambil data
Ucapan user
Mikrofon Komputer/Laptop
Penguat arus ATMega
8535 Soundcard
Modul serial K 125 R
Rangkaian penggerak
kipas Kipas angin
secara real time sebanyak sepuluh kali pengucapan dari masing-masing ucapan untuk menguji tingkat keberhasilan program yang dibuat.
5
BAB II
DASAR TEORI
2.1
Suara/Ucapan
Suara merupakan suatu hal yang unik dan memiliki rentang yang bisa didengar dan tidak bisa didengar oleh manusia, mempunyai frekuensi tertentu dan juga intensitas. Satuan dari frekuensi suara adalah Hertz diambil dari nama Fisikawan Heinrich Rudolf Hertz untuk menghargai jasa atas kontribusinya dalam bidang elektromagnetisme. Suara mempunyai rentang yang bisa didengar dan tidak bisa didengar. Rentang suara tersebut dibagi menjadi tiga bagian yaitu audible, infrasonik dan ultrasonik. Frekuensi audible adalah frekuensi yang bisa didengar oleh manusia, dengan frekuensi 20Hz - 20Khz. Frekuensi infrasonic adalah frekuensi di bawah 20 Hz, sementara frekuensi ultrasonik di atas 20 KHz.
Gambar 2.1. Ucapan
2.2
Mikrofon
Mikrofon adalah suatu alat yang dapat mengubah getaran suara menjadi getaran listrik. Mikrofon merupakan masukan untuk merekam suara. Karena sangat peka dalam menerima getaran suara, peletakan mikrofon memerlukan pengaturan yang khusus agar suara-suara yang tidak diperlukan tidak ikut masuk menggetarkan membrane mikrofon. Media penghantar getaran listriknya merambat melalui kabel[6]. Untuk mendapatkan hasil rekaman yang baik maka harus mengunakan mikrofon yang baik. Hal-hal yang harus diperhatikan untuk mendapatkan mikrofon yang baik adalah : prinsip cara kerja mikrofon dari jenis mikrofon itu sendiri, daerah respon frekuensi suara yang mampu dicuplik oleh mikrofon, keluaran sinyal listrik yang dihasilkan mikrofon dan bentuk fisik mikrofon. Gambar 2.2. memperlihatkan jenis mikrofon yang digunakan.
Gambar 2.2. Bentuk fisik mikrofon
2.3
Kartu Suara (Sound Card)
Gambar 2.3. Kartu suara (Sound Card)
2.4
Matlab
2.4.1
Window Utama Matlab
Window ini merupakan window induk untuk pengaksesan ke seluruh lingkungan kerja
menu-menu yang ada dalam Matlab. Gambar 2.4. memperlihatkan tampilan window.
Gambar 2.4. Window utama Matlab
2.4.2
Comand Window
[image:30.595.95.521.156.438.2]Command window ini dapat diakses dengan mengaksesnya pada menu window utama Matlab. Window ini berfungsi menerima perintah dari user untuk menjalankan seluruh fungsi yang ada di matlab. Gambar 2.5. memperlihatkan tampilan Comand window.
[image:30.595.86.527.158.712.2]2.4.3
Matlab Editor
Ketika membuka window utama Matlab, window editor ini tidak akan langsung muncul tetapi harus diakses lewat prompt matlab atau dengan cara mengklik menu file, new dan pilih M-File sehingga muncul window editor. Gambar 2.6. memperlihatkan tampilan window editor.
Gambar 2.6. Window editor
2.5
Sampling
Sampling merupakan proses pencuplikan gelombang suara yang akan menghasilkan gelombang diskret [9]. Dalam proses sampling, ada yang disebut dengan laju pencuplikan (sampling rate). Sampling rate menandakan berapa banyak pencuplikan gelombang analog dalam satu detik. Satuan dari sampling rate ialah Hertz (Hz). Kriteria Nyquist perlu diperhatikan dalam melakukan sampling. Kriteria Nyquist menyatakan bahwa sebuah sinyal harus memiliki sampling rate yang lebih besar dari 2 dengan adalah frekuensi paling tinggi yang muncul di sebuah sinyal.
2.6
Windowing
2.6.1
Hamming
Hamming adalah suatu jendela yang dapat digunakan untuk keperluan windowing. Hamming window digunakan untuk menaikan dan menghimpitkan bentuk gelombang sehingga bantuk gelombang yang turun mempunyai nilai puncak. Hamming window dapat juga digunakan untuk perhitungan sinyal yang efektif dengan meminimalkan sinyal yang terdiskontinuitas. Hamming window dapat dirumuskan sebagai berikut[11] :
Gambar 2.7. memperlihatkan contoh hamming window.
Gambar 2.7. Spektrum dengan Window Hamming.
2.7
Discrete Cosine Transform (DCT)
DCT merupakan suatu jenis transformasi yang banyak digunakan untuk pemampatan sinyal. DCT dari suatu runtun u (n) dengan panjang N titik, dirumuskan secara matematis sebagai berikut [12]:
Dengan:
{
√ (2.3)
Gambar 2.9 memperlihatkan contoh pengaruh windowing. Pada gambar terlihat sinyal DCT hasil windowing terlihat lebih rapat, karena sinyal-sinyal frekuensi tinggi tidak tampak.[10].
Gambar 2.8. Contoh DCT Dari Sinyal Dengan Menggunakan DCT 256 Titik
2.8
Fungsi Jarak Divergensi
Fungsi jarak divergensi digunakan untuk pengenalan ucapan atau suara. Jarak divergensi dirumuskan dengan[13]
∑
Di mana:
= Jarak Divergensi
2.9
Metode Template Matching
Template Matching adalah sebuah operasi dalam pengenalan pola yang digunakan untuk menentukan ada tidaknya perbedaan antara dua entitas (titik, kurva atau bentuk) dari jenis template (acuan) yang sama. Metode template matching adalah salah satu metode terapan, biasanya digunakan untuk mengidentifikasi citra angka, sidik jari dan aplikasi pencocokan citra lainnya. Secara umum template matching diartikan sebagai suatu cara untuk membandingkan dua deret angka untuk menentukan kesamaannya.[14]
2.10
Metode K-Nearest Neighbor (KNN) [15]
Algoritma k-nearest neighbor adalah sebuah metode untuk melakukan klasifikasi terhadap obyek berdasarkan data pembelajaran yang jaraknya paling dekat dengan obyek tersebut. Dari gambar yang diberi vector x dan ukuran jarak, maka:
a. Dari vector N, mengidentifikasi k-nearest neighbor (KNN),yang lepas dari label kelas. k adalah yang dipilih untuk menjadi dua kelas bermasalah, dan secara umum tidak menjadi kelipatan dari jumlah kelas M.
b. Dari sample k, mengidentifikasi untuk jumlah vector, , yang termasuk dalam kelas , i = 1,2,…,M. tentunya∑
c. Penetapan x untuk kelas dengan maksimal jumlah sampel dari .
2.11
Modul Serial (K 125 R)
Modul serial (K 125 R) merupakan USB atmel AVR ISP Programmer yang dilengkapi dengan komunikasi USB ke serial. K 125 R membantu dalam memprogram Mikrokontroler. Bentuk fisik K 125 R diperlihatkan pada gambar 2.9.
Gambar 2.10. Bentuk fisik port ISP pada modul serial (K 125 R) Modul K 125 R memiliki spesifikasi sebagai berikut:
a. Format file yang didukung adalah *.hex b. Target In system Programmer (ISP)
c. Kompatibel dengan Windows XP, Windows Vista dan Windows 7
d. Didukung oleh software CodeVision AVR Evaluasi, AVR OSP II dan AVR Studio 4. e. Tidak membutuhkan catu daya tambahan dari luar.
f. Terdapat selector jumper untuk power board mikrokontroler AVR jika membutuhkan power dari USB untuk download program[16]
2.12
Mikrokontroler ATMega8535
Atmel adalah salah satu vendor yang bergerak di bidang mikroelektronika, telah mengembangkan AVR (Alf and Vegard’s Risc Processor). Berbeda dengan mikrokontroler MCS51, AVR menggunakan arsitektur RISC (Reduce Instruction Set Computer) yang mempunyai lebar bus data 8 bit. Perbedaan ini bisa dilihat dari frekuensi kerjanya. MCS51 memiliki frekuensi kerja seperduabelas kali frekuensi osilator sedangkan frekuensi kerja AVR sama dengan frekuensi osilator. Jadi dengan frekuensi osilator yang sama kecepatan AVR dua belas kali lebih cepat dibandingkan dengan MCS51. Secara umum AVR dibagi menjadi 4 kelas, yaitu ATtiny, AT90Sxx, ATMega dan AT86RFxx[18].
2.12.1
Arsitektur ATMega 8535
a. Fitura. 8 bit AVR berbasis RISC dengan performa tinggi dan konsumsi daya rendah b. Kecepatan maksimal 16 MHz
d. Timer/Counter : 2 buah 8 bit timer/counter, 1 buah 16 timer/counter, 4 kanal PWM e. 8 kanal 10/8 bit ADC
f. Programable Serial USART g. Komparator Analog
h. 6 pilihan sleep mode untuk penghematan daya listrik i. 32 jalur I/O yang bisa diprogram
Gambar 2.11. Bentuk fisik mikrokontroler ATMega 8535
b. Konfigurasi PIN Mikrokontroler ATMega 8535
Mikrokontroler AVR memiliki arsitektur RISC 8 bit, sehingga semua instruksi dikemas dalam kode 16 bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam satu siklus instruksi clock. Mikrokontroler AVR ATMega 8535 mempunyai 40 kaki, 32 kaki diperlukan untuk keperluan port pararel. Setiap port terdiri dari 8 pin. Gambar 2.12. memperlihatkan konfigurasi pin ATMega 8535.
a. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya b. GND merupakan pin Ground
c. Port A ( PA0, PA1, PA2, PA3, PA4, PA5, PA6, PA7) merupakan pin I/O dan pin masukan ADC.
d. Port B ( PB0, PB1, PB2, PB3, PB4, PB5, PB6, PB7) merupakan pin I/O dan pin yang mempunyai fungsi khusus yaitu Timer/Counter, Comparator Analog dan SPI
e. Port C (PC0, PC1, PC2, PC3, PC4, PC5, PC6, PC7) merupakan Port I/O dan pin yang mempunyai fungsi khusus, yaitu komparator analog dan Timer Oscillator.
f. Port D (PD0, PD1, PD2, PD3, PD4, PD5, PD6, PD7) merupakan port I/O dan pin fungsi khusus yaitu komparator analog dan interrupt eksternal serta komunikasi serial. g. RESET merupakan pin yang di gunakan untuk mereset mikrokontroler
h. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal i. AVCC merupakan pin masukan untuk tegangan ADC
j. AREF merupakan pin masukan tegangan referensi untuk ADC[17]
2.13
Penguat Arus
Penguat arus yang digunakan adalah ULN 2803 yang didalamnya terdapat delapan transistor darlington yang dikemas di dalam satu IC (integrated circuit) dan mempunyai 18 pin. Setiap transistor bekerja secara individu atau terpisah sehingga beban yang dapat dipasang pada ULN 2803 sebanyak 8 buah. Gambar 2.13. Bentuk fisik ULN 2803.
Gambar 2.13. Bentuk fisik ULN 2803
sebagai keluaran dengan hasil penguatan memiliki tegangan maksimal 50 V dan arus 500 mA. Gambar 2.14 memperlihatkan bentuk Schematik kaki input dan output ULN 2803[19].
Gambar 2.14. Bentuk Schematik ULN 2803
2.14
Triac
Triac atau Triode for Alternating Current (Trioda untuk arus bolak-balik) adalah komponen elektronika yang ekivalen dengan dua SCR yang disambungkan anti paralel dan kaki gerbangnya disambung bersama. TRIAC (Bidirectional Triode Thyristor) mempunyai tiga piranti yang dapat melewatkan arus dalam kedua arah melalui jalur utamanya. Terminal-terminal arus utama dikenal sebagai terminal utama-1 (T1) dan terminal utama-2 (T2). Seperti yang diperlihatkan pada gambar 2.15 a
(a) (b) Gambar 2.15. Simbol Triac dan rangkaian ekuivalen Triac
Triac tersusun dari dua buah SCR yang di pasang paralel berkebalikan seperti pada gambar 2.15 b
arus DC. Jika dua SCR digabung secara pararel berkebalikan maka didapatkan suatu pengendali fasa AC dan disebut dengan triac.
2.15
Relay
Relay adalah suatu komponen elektronika yang akan bekerja bila ada arus yang melalui kumparannya. Sebuah relay terdiri dari kumparan yang dililitkan pada inti besi dan kontak-kontak penghubung. Apabila kumparan yang melilit inti besi dilalui arus listrik maka akan menimbulkan induksi medan magnet, dan induksi ini akan menarik kontak-kontak penghubung relay. Relay mempunyai dua keadaan yaitu NC (Normally Close) dan NO (Normally Open) .Gambar 2.16. memperlihatkan keadaan relay NC.
Gambar 2.16. Normally Close
Pada gambar di atas ditunjukan pada saat elektromagnetik tidak diberikan sumber tegangan maka tidak ada medan magnet yang menarik armature, sehingga saklar relay tetap terhubung ke terminal NC (Normally Close) seperti terlihat pada gambar di atas. Kemudian pada saat electromagnet diberikan sumber tegangan maka terdapat medan magnet yang menarik armature, sehingga saklar relay terhubung ke terminal NO (Normally Open) seperti gambar 2.17.
V1 VR (t) IR
Vs = Vm sin wt Is = Im sin wt
VC (t) IC
Vs = Vm sin wt Is
2.16
Rangkaian Pengendali Fase
2.16.1
Hubungan Arus dan Tegangan Sinyal Sinusoida di R dan C
a. Rangkaian arus bolak-balik dengan resistor murniTegangan sinusoida dapat ditulis dalam bentuk persamaan tegangan sebagai fungsi waktu. Persamaan di bawah ini menunjukan tegangan yang melewati resistor pada waktu t
Tegangan yang melewati resistor berbentuk sinusoida. Dengan demikian arus yang dihasilkan juga sinusoida dan dapat dinyatakan dengan
Dimana dan adalah tegangan dan arus maksimum pada rangkaian. Dari kedua persamaan di atas dapat dilihat bahwa tegangan dan arus pada resistor adalah sefase.
(a) (b)
Gambar 2.18. Rangkaian (a) Resistor (b) Kapasitor
b. Rangkaian arus bolak-balik dengan kapasitor murni
Pada gambar 2.18.b rangkaian di atas menunjukan suatu rangkaian seri antara sumber AC dengan sebuah kapasitor. Persamaan untuk tegangan dalam sebuah kapasitor adalah
L
R
C
Vs
Dengan , maka:
)
Dengan reaktansi kapasitif:
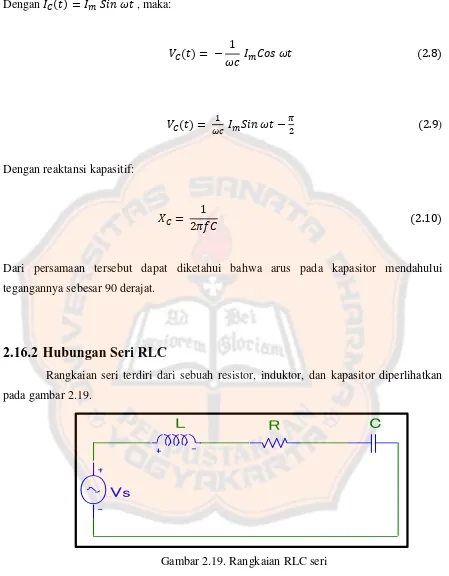
Dari persamaan tersebut dapat diketahui bahwa arus pada kapasitor mendahului tegangannya sebesar 90 derajat.
2.16.2
Hubungan Seri RLC
[image:41.595.82.531.74.650.2]Rangkaian seri terdiri dari sebuah resistor, induktor, dan kapasitor diperlihatkan pada gambar 2.19.
Gambar 2.19. Rangkaian RLC seri Tegangan catu daya yang diberikan:
Dimana Z adalah impedansi rangkaian, dan besarnya adalah
√ 2.12
Dan besarnya sudut fase:
Tegangan pada kapasitor dapat dicari dengan pembagi tegangan:
2.17
Regulator Tegangan
Pengatur tegangan (voltage regulator) berfungsi menyediakan suatu tegangan keluaran DC tetap yang tidak dipengaruhi oleh perubahan tegangan masukan, arus beban keluaran, dan suhu. Pengatur tegangan adalah salah satu bagian dari rangkaian catu daya DC. Dimana tegangan masukannya berasal dari tegangan keluaran filter, setelah melalui proses penyearahan tegangan AC menjadi DC[20].
2.17.1. Pengatur Tegangan IC 78XX
IC 78XX adalah regulator tegangan positif dengan tiga terminal, masing-masing input, ground dan output. IC 78XX tersedia untuk beberapa nilai tegangan keluaran seperti diperlihatkan pada tabel 2.1[20].
Tabel 2.1. Tipe IC 78XX
Type VOUT (Volt IOUT (A) VIN (Volt)
78XXC 78LXX 78MXX Min Maks
7805 5 1 0,1 0,5 7,5 20
7806 6 1 0,1 0,5 8,6 21
7808 8 1 0.1 0.5 10.5 23
7809 9 1 0.1 0.5 11,5 24
7810 10 1 0.1 0.5 12,5 25
Tabel 2.1. (lanjutan) Tipe IC 78XX
7815 15 1 0.1 0.5 17,5 30
7818 18 1 0.1 0.5 21 33
7824 24 1 0.1 0.5 27 38
Meskipun semula dirancang untuk regulator tegangan tetap, namun regulator ini dapat dikembangkan untuk tegangan dan arus yang dapat diatur. Untuk tegangan dan arus output sesuai nilai nominalnya rangkaian dasar 78XX ditunjukkan pada gambar 2.20.
Gambar 2.20 Rangkaian dasar regulator 78XX
C1 diperlukan jika regulator jauh dari Kapasitor filter pencatu daya sedangkan C2 diperlukan untuk memperbaiki tanggapan kilasan dan penindasan kerut (trancient response)[20]. Dalam penerapannya, tegangan masukan VIN harus lebih besar dari tegangan keluaran, jika kurang maka regulator tidak berfungsi tetapi bila melebihi nilai VIN maksimumnya dapat merusak regulator. Perhitungan nilai kapasitor C1 menggunakan persamaan:
dengan
C : Kapasitor dalam Farad
: Arus beban dalam Ampere
f : Frekuensi dalam Hz
Di mana nilai dapat dicari dengan menggunakan persamaan[20]:
dengan adalah tegangan ripple peak to peak yang merupakan selisih antara tegangan masukan regulator dengan tegangan masukan minimum IC regulator yang digunakan atau dapat dirumuskan sebagai berikut:[21]
dengan:
: Tegangan masukkan regulator dalam volt
: Tegangan masukkan minimum IC regulator
Apabila tegangan masukan regulator berasal dari tegangan AC yang kemudian disearahkan menggunakan dioda, nilai dicari menggunakan persamaan[20]:
23
BAB III
PERANCANGAN ALAT
3.1
Gambaran Umum Perancangan Alat
Perancangan sistem kerja alat adalah gambaran umum untuk mengidentifikasi seluruh sistem kerja alat. Secara garis besar alat ini terdiri dari perangkat lunak dan perangkat keras. Gambar 3.1. memperlihatkan gambaran umum sistem kerja alat.
Perangkat lunak merupakan program matlab di laptop yang berfungsi untuk menyimpan data hasil rekaman ucapan seperti hidup, lambat, cepat dan mati. Program matlab ini juga berperan untuk pengenalan tiga ucapan user mulai dari perekaman hingga menampilkan data hasil rekaman. Selain itu perangkat lunak yang lainnya yaitu program di dalam mikrokontroler yang berfungsi untuk menggerakan kipas AC sedangkan yang termasuk dalam perangkat keras yaitu Modul K 125 R untuk mendukung Mikrokontroler dan rangkaian mikrokontroler ATMega 8535 yang berfungsi untuk menerima data user dari Matlab kemudian mengolahnya untuk menggerakan kipas AC. Keluaran dari mikrokontroler ATMega 8535 berupa data yang terhubung ke penguat tegangan dan arus dan selanjutnya mikrokontroler akan menggerakan relay. Relay ini yang selanjutnya akan berfungsi sebagai saklar elektronis yang terangkai dengan rangkaian kendali kipas AC.
3.1.1
Ucapan
Masukan berupa ucapan dengan jarak user dan mikrofon ± 10 cm. Ucapan yang diucpakan yaitu hidup, lambat, cepat dan mati. Setiap kata diucapkan sebanyak sepuluh kali untuk pembentukan database dan 10 kata untuk proses pengenalan. Proses terbentuknya ucapan terjadi ketika udara yang dikeluarkan oleh paru-paru menggerakkan pita suara. Gerakan membuka dan menutup pita suara itu menyebabkan udara di sekitar pita suara itu bergetar. Perubahan bentuk saluran suara yang terdiri atas rongga faring, rongga mulut, dan rongga hidung menghasilkan bunyi bahasa yang berbeda-beda.
3.1.2
Mikrofon
Mikrofon yang digunakan adalah mikrofon merk genius. Tujuan menggunakan mikrofon adalah untuk menangkap sinyal analog masukan dan ucapan hidup, lambat, capat, dan mati lalu diteruskan menuju sound card pada laptop melalui line in yang ada pada sound card. Spesifikasi mikrofon dapat dilihat pada table 3.1.
Tabel 3.1. Spesifikasi Mikrofon genius
Frequency Response 100 Hz - 10 KHz
Sensitivity -62dB
3.1.3
Kartu Suara (Sound Card)
Kartu suara (Sound card) merupakan salah satu subsistem elektronik yang berada di laptop untuk merubah sinyal ucapan berupa sinyal analog menjadi sinyal digital sehingga dapat diproses di Matlab. Kartu suara juga digunakan untuk merekam suara masukan dari mikrofon yang terhubung pada laptop.
3.1.4
Matlab
Matlab digunakan untuk mengolah data ucapan. Pada matlab dibuat program untuk pembentukan database, pengenalan ucapan, komunikasi dan pengiriman data.
3.1.5
Modul Serial K 125 R
Modul serial K 125 R berfungsi untuk komunikasi data secara serial. Modul ini mengirimkan data pengenalan ucapan dari laptop yang diolah dalam software Matlab ke mikrokontroler ATMega 8535.
3.1.6
ATMega 8535
ATMega 8535 digunakan untuk menerima data serial pengolahan pengenalan ucapan dan mengolah data serial untuk mengatur kecepatan kipas AC.
3.1.7
Penguat Arus
Penguat arus yang digunakan pada perancangan ini yaitu ULN 2803. Tujuan penggunaan ULN 2803 adalah untuk menguatkan keluaran tegangan dan arus dari mikrokontroler untuk dapat menggerakan relay.
3.1.8
Penggerak Kipas
Rangkaian penggerak kipas merupakan rangkaian yang digunakan untuk menggerakan kipas AC berdasarkan ucapan dari user.
3.1.9
Kipas Angin
Perekaman Pre processing Ekstraksi ciri DCT
Pembanding (jarak divergensi)
Penentuan keluaran Pengiriman serial
Database
3.2
Perancangan Software, Proses Pengenalan dan Kerja Sistem
3.2.1 Perancangan Proses Pengenalan Ucapan
Proses perancangan untuk pengenalan ucapan user yang direkam dan akan dikenali ucapannya di database melalui proses sampling. Proses pengenalan ucapan dimulai dari proses perekaman pengenalan ucapan, Pre-processing, ekstraksi ciri, database, Pembanding (jarak divergensi), penentuan keluaran dan pengiriman data secara serial ke hardware. Gambar blok diagram 3.2. memperlihatkan proses kerja sistem.
Gambar 3.2. Diagram blok proses sistem pengenalan
Proses sampling merupakan proses pencuplikan ucapan user. Pencuplikan ucapan user dipengaruhi oleh frekuensi sampling dan banyaknya waktu pencuplikan. Penentuan frekuensi sampling ditentukan berdasarkan rentang suara manusia yang berkisar 300 - 3000 Hz. Penentuan ini diambil berdasarkan teori Kriteria Nyquist menyatakan bahwa sebuah sinyal harus memiliki sampling rate yang lebih besar dari 2 dengan adalah frekuensi paling tinggi yang muncul disebuah sinyal. Hasil perekaman juga akan ditunjukan dalam bentuk plot pada matlab.
Panjang Pencuplikan MULAI
Rentang waktu Pencuplikan
Masukan : (Ucapan Manusia (User))
Keluaran : (data ucapan tercuplik)
SELESAI Rekam
Gambar 3.3. Diagram alir proses pencuplikan ucapan
Panjang pencuplikan merupakan banyaknya jumlah data sinyal ucapan yang tercuplik selama rentang waktu pencuplikan. Panjang pencuplikan ini diperoleh sebagai berikut :
2 .
.2
Normalisasi
Pemotongan sinyal
Windowing
Zero padding
SELESAI
Masukkan : Hasil pencuplikan ucapan
Keluaran : Hasil pre-processing
MULAI
3.2.2
Pre-Processing
Pengkondisi sinyal data hasil ucapan pengenalan maupun database merupakan proses pre-processing. Proses pre-processing ini meliputi proses normalisasi, pemotongan sinyal, windowing dan zero padding. Gambar diagram alir 3.4. memperlihatkan proses pre-processing.
MULAI
Masukkan : Hasil pencuplikan ucapan
Normalisasi
Keluaran : Hasil normalisasi
SELESAI a. Normalisasi
Proses normalisasi merupakan proses lanjutan dari hasil sampling. Tujuan dari normalisasi adalah untuk menyamakan besar nilai amplitudo maksimum database sehingga efek dari kuat lemahnya ucapan tidak mempengaruhi pada proses pengenalan database. Pada proses normalisasi hasil pencuplikan ucapan akan disamakan nilai amplitudo dengan skala maksimum amplitudo maksimum 1 atau -1 dengan menggunakan rumus normalisasi sebagai berikut :
Dimana : x0 = Data masukan x1 = Hasil normalisasi
Gambar 3.5. memperlihatkan proses normalisasi.
b. Pemotongan sinyal
Data hasil normalisasi akan dimasukan ke proses pemotongan sinyal yang bertujuan untuk menghilangkan atau memotong sinyal yang bukan merupakan data hasil ucapan dan untuk mendapatkan data ucapan yang diperlukan. Proses pemotongan sinyal memiliki variabel batas potong yang bertujuan untuk membatasi data sinyal ucapan yang akan dipotong. Pemotongan sinyal dimulai dari bagian kiri sinyal yang tidak mengandung data sinyal ucapan dan terakhir pada bagian kanan sinyal. Pemotongan sinyal ini ditentukan oleh variabel batas potong yang sudah ditentukan yaitu 0,2; 0,3; 0;4; 0,5. Gambar diagram alir 3.6. memperlihatkan proses pemotongan sinyal.
Gambar 3.6. Diagram alir proses pemotongan sinyal
c. Windowing
Proses selanjutnya setelah proses pemotongan sinyal adalah proses windowing . Windowing yang digunakan adalah Hamming window. Tujuan dari menggunakan Windowing ini adalah untuk mengurangi efek diskontinuitas dari data sinyal pada ucapan,
MULAI
Masukkan : Hasil normalisasi
SELESAI Potong kiri
Potong kanan
MULAI
Masukkan : (hasil pemotongan sinyal)
Proses windowing
Keluaran : hasil windowing
SELESAI
dan mengatur nilai standar deviasi sehingga membantu keakuratan hasil ekstraksi ciri Proses windowing diperlihatkan pada gambar diagram alir 3.7.
Gambar 3.7. Diagram alir proses windowing
d. Zero padding
MULAI
Masukan (hasil processing)
A SELESAI
Keluaran : hasil Zerro padding
MULAI
Proses zerro padding
Masukan (hasil windowing)
Gambar 3.8. Diagram alir proses zero padding
3.2.3
Ekstraksi Ciri
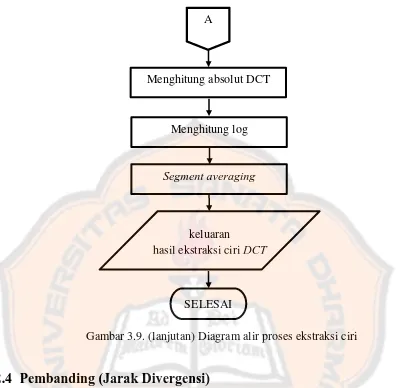
Setelah proses Zero Pading, proses selanjutnya yaitu ekstra ciri. Ekstraksi ciri terdiri dari proses downsampling dan transformasi. Proses downsampling bertujuan untuk mencuplik data sinyal ucapan menjadi lebih sedikit. Proses selanjutnya adalah proses transformasi, transformasi yang digunakan adalah transformasi DCT (Discrete Cosine Transform). Gambar 3.9. memperlihatkan diagram alir ekstraksi ciri.
SELESAI Menghitung log
keluaran hasil ekstraksi ciri DCT
Segment averaging Menghitung absolut DCT
A
MULAI
Masukan (hasil ekstraksi ciri DCT)
[image:55.595.101.498.73.461.2]B
Gambar 3.9. (lanjutan) Diagram alir proses ekstraksi ciri
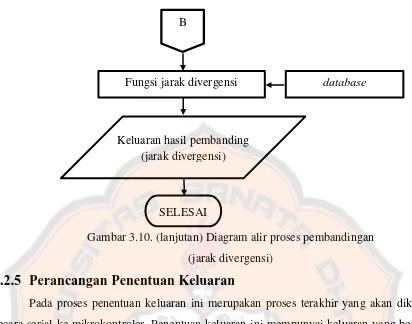
3.2.4
Pembanding (Jarak Divergensi)
[image:55.595.84.505.459.733.2]Proses pembandingan menggunakan jarak divergensi. Jarak divergensi digunakan untuk membandingkan masukan data sinyal ucapan dengan database ucapan. Hasil proses pembandingan ini digunakan sebagai penentu hasil pengenalan ucapan. Gambar 3.10. memperlihatkan proses pembanding (jarak divergensi).
Fungsi jarak divergensi
SELESAI
Keluaran hasil pembanding (jarak divergensi)
database B
Masukan hasil pembanding (jarak divergensi)
MULAI
C
[image:56.595.92.504.68.392.2]Proses k-nearest neighbor (KNN)
Gambar 3.10. (lanjutan) Diagram alir proses pembandingan (jarak divergensi)
3.2.5
Perancangan Penentuan Keluaran
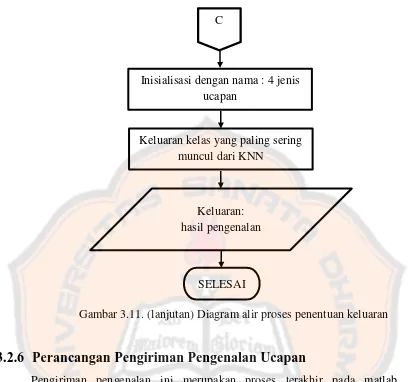
[image:56.595.85.526.378.730.2]Pada proses penentuan keluaran ini merupakan proses terakhir yang akan dikirim secara serial ke mikrokontroler. Penentuan keluaran ini mempunyai keluaran yang berupa data hasil pengenalan ucapan yang ditentukan berdasarkan kelas yang paling banyak muncul dengan menggunakan metode k-nearest neighbor (KNN). Setelah itu hasil dari nilai kelas yang paling banyak muncul tersebut akan menjadi keluaran berupa teks ucapan yaitu hidup, lambat, cepat dan mati. Gambar 3.11 memperlihatkan proses penentuan keluaran.
Inisialisasi dengan nama : 4 jenis ucapan
SELESAI
Keluaran: hasil pengenalan
Keluaran kelas yang paling sering muncul dari KNN
[image:57.595.89.498.74.456.2]C
Gambar 3.11. (lanjutan) Diagram alir proses penentuan keluaran
3.2.6
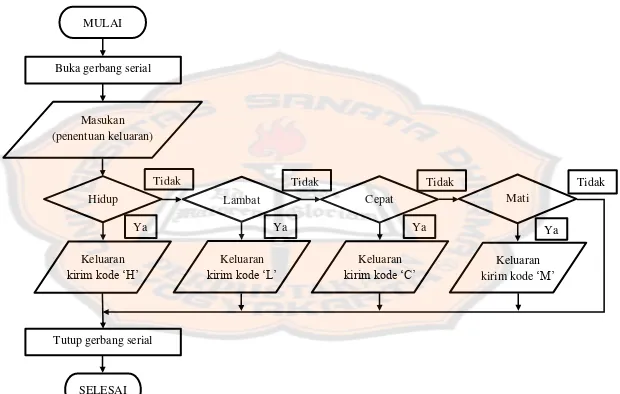
Perancangan Pengiriman Pengenalan Ucapan
Pengiriman pengenalan ini merupakan proses terakhir pada matlab. Hasil pengenalan berupa teks akan dikirim secara serial dari matlab ke mikrokontroler melalui modul K 125 R dalam bentuk karakter kode ascii dan akan dilanjutkan pada proses selanjutnya. Tujuan dari penggunaaan kode ascci adalah mengubah karakter ke dalam bentuk hexadesimal sehingga bisa dikenali mikrokontroler. Tabel 3.2. memperlihatkan inisialisasi dari ucapan, hidup, lambat, cepat dan mati.
Tabel 3.2. Tabel Pengenalan pada mikrokontroler
Pengenalan Kode Ascii Bilangan Hexa
Hidup H 048
Lambat L 04C
Cepat C 043
Mati M 04D
Ya Tidak MULAI
SELESAI Buka gerbang serial
Masukan (penentuan keluaran)
Tutup gerbang serial
Hidup Lambat Cepat Mati
Keluaran kirim kode ‘H’
Keluaran kirim kode ‘M’ Keluaran
kirim kode ‘C’ Keluaran
kirim kode ‘L’
Tidak Tidak Tidak
[image:58.842.139.759.83.477.2]Ya Ya Ya
Ucapan Perekaman Normalisasi
Zero Padding Ekstraksi ciri
Hasil ekstraksi ciri
Pemotongan Sinyal
Windowing
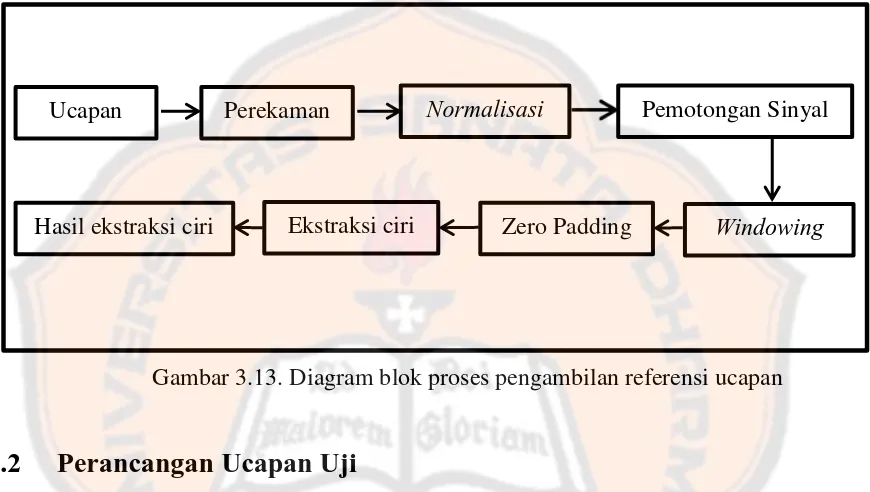
3.1
Perancangan Referensi Ucapan
Pada perancangan ini ucapan hidup, lambat, cepat dan mati digunakan sebagai referensi. Terdapat 12 set sampel yang berasal dari kombinasi variasi batas potong (0,2 ; 0,3 ; 0,4 ; 0,5) , Segment averaging (8, 16, 32, 64, 128, 256) , dan KNN (1, 3, 5, 7).
[image:59.595.92.527.203.449.2]Setiap sampel akan melalui proses sampling, windowing, zerro padding DCT dan KNN. Diagram blok proses diperlihatkan pada gambar 3.13.
Gambar 3.13. Diagram blok proses pengambilan referensi ucapan
3.2
Perancangan Ucapan Uji
Pembuatan ucapan uji untuk menentukan batas potong dan segment averaging, dan KNN yang optimal. Ucapan uji ada 40 (4 kata X 10 ucapan) dengan tiga user sehingga total ucapan uji adalah 120 (40 kata X 3 user).
3.3
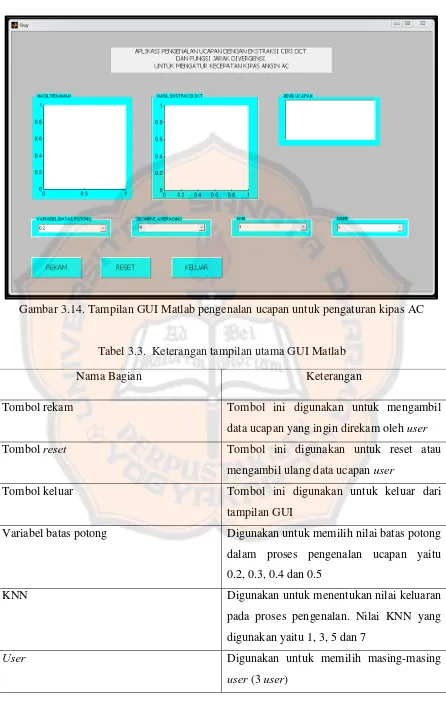
Perancangan Tampilan GUI Matlab
Gambar 3.14. Tampilan GUI Matlab pengenalan ucapan untuk pengaturan kipas AC
Tabel 3.3. Keterangan tampilan utama GUI Matlab
Nama Bagian Keterangan
Tombol rekam Tombol ini digunakan untuk mengambil
data ucapan yang ingin direkam oleh user
Tombol reset Tombol ini digunakan untuk reset atau
mengambil ulang data ucapan user
Tombol keluar Tombol ini digunakan untuk keluar dari
tampilan GUI
Variabel batas potong Digunakan untuk memilih nilai batas potong dalam proses pengenalan ucapan yaitu 0.2, 0.3, 0.4 dan 0.5
KNN Digunakan untuk menentukan nilai keluaran
pada proses pengenalan. Nilai KNN yang digunakan yaitu 1, 3, 5 dan 7
User Digunakan untuk memilih masing-masing
Laptop Modul Serial K 125 R
ATMega 8535
Kipas angin
Penguat Arus
Rangkaian Penggerak Kipas
Tabel 3.3. (Lanjutan) Keterangan tampilan Utama GUI Matlab
Segment averaging Digunakan untuk memilih nilai segment averaging dalam proses pengenalan ucapan. segment averaging yang digunakan yaitu 8, 16, 32, 64, 128 dan 256
Hasil rekaman Digunakan untuk menampilkan grafik data
hasil perekaman
Hasil Ekstraksi DCT Digunakan untuk menampilkan grafik data hasil ekstraksi DCT
3.4
Perancangan Hardware Pengaturan Kipas AC
[image:61.595.78.532.87.301.2]Perancangan perangkat keras terdiri dari modul K 125 R, ATMega 8535, penguat arus, penggerak kipas, ATMega 8535 merupakan kendali utama di hardware untuk menggerak kipas angin AC dengan menerima data secara serial dari program matlab. Keluaran dari mikrokontroler berupa data yang berhubungan dengan suatu penguat tegangan dan arus. Mikrokontroler akan akan menggerakan relay secara bergantian. Relay ini selanjutnya berfungsi sebagai saklar elektronis yang terangkai dengan rangkaian kendali kipas. Diagram blok rangkaian perangkat keras ditunjukan pada gambar 3.15.
Gambar 3.15. Diagram Blok Perangkat Keras (Hardware)
3.6.1
Masukan (Input)
3.6.2
Perancangan Mikrokontroler ATMega 8535
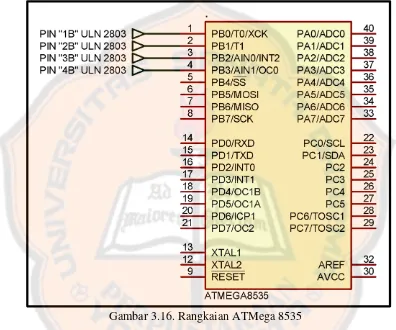
Penerimaan data hasil inisialisasi dari matlab ke mikrokontroler akan diproses selanjutnya untuk menentukan nilai yang mengatur relay sehingga dapat menentukan keadaan kipas AC. Mikrokontroler merupakan pusat untuk mengontrol kipas. Mikrokontroler mempunyai 4 port A, B, C dan D, dan setiap port memiliki 8 pin. Rangkaian ATMmega 8535 ditunjukan pada gambar 3.16.
Gambar 3.16. Rangkaian ATMega 8535
[image:62.595.99.495.200.530.2]Konfigurasi penggunaan port ATMega 8535 sebagai masukan data serial adalah port ISP dan port yang digunakan output adalah port B.0 sampai port B.3. Konfigurasi pin diperlihatkan pada tabel 3.4.
Tabel 3.4. Konfigurasi Pin Mikrokontroler
Fungsi Hardware Port yang digunakan
Masukan Penerima serial Port ISP
Keluaran Relay Port B.0
3.6.3
Perancangan ULN 2803
[image:63.595.97.515.141.358.2]ULN 2803 digunakan untuk menguatkan relay. ULN 2803 memiliki 16 pin seperti untuk masukan dan keluarannya seperti pada gambar 3.17.
Gambar 3.17. Rangkaian ULN 2803
Pin satu, pin dua, pin tiga dan pin empat dihubungkan ke ATMega 8535 dengan tegangan masukan pada ULN 2803 sebesar 30 volt dan arus maksimalnya adalah 25 mA. Pin lima belas, pin enam belas, tujuh belas, delapan belas dihubungkan ke relay. Pin delapan dihubungkan ke ground dan pin delapan belas dihubungkan ke VCC.
3.6.4
Perancangan Keadaan Kipas AC
[image:63.595.84.524.148.627.2]Keadaan kipas untuk ucapan hidup, cepat, lambat dan mati dibagi ke dalam 5 level dengan kecepatan putaran yang berbeda seperti diperlihatkan pada tabel di bawah. Keadaan kipas AC di perlihatkan pada tabel 3.5.
Tabel 3.5. Tabel Keadaan Kipas AC Keadaan
Sekarang
Masukan
Hidup Lambat Cepat Mati
Level 0 Level 4 Level 0 Level 1 Level 0
Level 1 Level 4 Level 0 Level 2 Level 0
Level 2 Level 4 Level 1 Level 3 Level 0
Level 3 Level 4 Level 2 Level 4 Level 0
Level 4 Level 4 Level 3 Level 4 Level 0
Dari diagram alir di atas ditentukan tiga variabel yaitu A, B dan C. Variabel A dan C digunakan untuk menentukan keadaan, sedangkan B sebagai variabel untuk menentukan keluaran seperti diperlihatkan pada tabel 3.6.
Tabel 3.6. Keluaran Variabel B
Keluaran variabel B
0
1
2
3
4
Selektor 0000 1000 0100 0010 0001
3.6.1
Rangkaian Relay
Rangkaian relay merupakan rangkaian yang terhubung dengan mikrokontroler. Relay yang digunakan adalah relay lima kaki. Kumparan magnetik pada relay akan bekerja jika ada masukan 12 Volt DC. Sehingga memberikan kondisi close untuk NO dan kondisi open untuk NC. Karena tidak dimungkinkan untuk menggerakan kipas langsung dari mikrokontroler karena keluaran dari mikrokontroler hanya sebesar 5 Volt dan arus 15 mA maka harus ditambah penguatan tegangan dan penguat arus untuk dapat menggerakkan relay. Gambar 3.19. memperlihatkan rangkaian relay.
Penyangga tegangan yang dimiliki ULN 2803 adalah 8 (delapan) penyangga tegangan dan arus. Perancangan ini menggunakan 4 (empat) penyangga untuk menggerakan relay, sesuai dengan 4 (empat) keadan putaran level 0 sampai level 3.
3.6.2
Rangkaian Penggerak Kipas
[image:66.595.97.503.229.510.2]Rangkaian penggerak kipas menggunakan triac atau dua buah thyristor yang dirangkai secara paralel dengan satu elektroda pintu (gate). Gambar 3.20. memperlihatkan rangkaian penggerak kipas.
Gambar 3.20. Rangkaian Penggerak Kipas AC
Triac dipicu dalam conducting mode-nya oleh kondisi yang dipasang pada gerbangnya. Jika tegangan yang dipasang pada gerbang adalah nol, triac mencegah aliran arus dalam kedua arah apapun polaritas dari kedua terminal utamanya. Dari data sheet diketahui tegangan break over untuk memicu triac adalah 1.5 Volt. Pada gambar 3.18 diketahui bahwa VG (tegangan gerbang) adalah tegangan pada kapasitor (Vc), dari
persamaan (2.14) di dapat :
⁄
) = 3183,099 Ω
Jika tegangan sumber yang digunakan adalah 220 Volt, maka :
⁄
(1.5/220) = (3183,099/ Z) Z = 466854,52 Ω
[image:67.595.86.520.258.707.2]Perancangan alat ini, kipas angin memiliki spesifikasi 220V / 20 W / 50 Hz dan berdasarkan hasil pengukuran didapat hasil pengukuran seperti ditunjukan tabel 3.7.
Tabel 3.7. Pengukuran Kipas Kecepatan Putar kipas
(rpm)
Tegangan sumber (V)
Arus (A)
43,6 rpm – 2275,1 rpm 221,2 V 200 mA
Dari tabel hasil pengukuran dapat dihitung reaktansi dari kipas sebagai berikut :
= 44 VA
Jadi nilai reaktansi pada kipas adalah 5324 . Pada gambar 2.20 memperlihatkan gambar rangkaian seri RLC, maka dari gambar tersebut dapat dicari nilai hambatan (R) sebagai berikut:
√
√ √
= 4,7
[image:68.595.82.516.52.617.2]3.6.3
Perancangan Catu Daya
[image:69.595.96.515.250.609.2]Rangkaian catu daya memperoleh sumber tegangan dari jala-jala listrik PLN. Tegangan AC 220 volt harus diturunkan terlebih dahulu melalui trafo 1 A. Penurunan tegangan menjadi sekitar 15 volt. Tegangan AC tersebut kemudian disearahkan oleh dioda, sehingga menghasilkan gelombang penuh. Rangkaian catu daya berfungsi untuk menghasil tegangan DC sebesar +12 volt dan +5 volt dengan menggunakan IC LM7812 dan IC LM7805. Catu daya digunakan untuk memberikan suplai tegangan ke seluruh sistem hardware alat. Gambar 3.21. memperlihatkan rangkaian catu daya.
Gambar 3.21. Rangkaian catu daya 12 volt dan 5 volt
Nilai kapasitor C1 dihitung dengan menggunakan persamaan 2.15 dengan sebesar 1 A dan frekuensi 50 Hz. Nilai dihitung menggunakan persamaan 2.16,
dihitung menggunakan persamaan 2.17, dan dihitung menggunakan
Kapasitor C1 1924 μF dan kapasitor C2 799 μF tidak ada di pasaran, sehingga digunakan kapasitor C1 2200 μF dan kapasitor C2 1000 μF. Nilai kapasitor C1 dan C2 merupakan nilai kapasitor minimum yang dibutuhkan oleh rangkaian regulator yang akan dirancang, sehingga digunakan kapasitor yang lebih besar. Semakin besar nilai kapasitansi C, nilai tegangan ripple juga akan semakin kecil. Nilai kapasitor C3 dan C4 adalah 0,1μF diperoleh dari datasheet.
b. LM7805
� ���√
� √
� �
� � � � � �
� � �
� � � �
� � �� � �
√
� � √
� � �
� √ ∗��∗�
�
� √ ∗ ∗
� µ� � ���√
� √ a. LM7812
� �
� � � � � �
� � �
� � � �
� � �� � �
√
� � √
� � �
� √ ∗��∗�
�
� √ ∗ ∗
49
BAB IV
HASIL DAN PEMBAHASAN
Bab hasil dan pembahasan berisikan pemaparan mengenai pengujian sistem software dan hardware yang sudah dirancang, gambaran tentang hardware, software yang dibuat dan hasil pengambilan data. Pengujian yang dilakukan dengan empat ucapan dari tiga user yaitu hidup, lambat, cepat dan mati. Hasil pengujian berupa data-data yang diperoleh untuk memperlihatkan bahwa alat dan program yang dirancang telah bekerja dengan baik atau tidak. Hasil pengambilan data-data dapat dilakukan analisis terhadap proses kerja alat yang akan digunakan untuk memberikan kesimpulan.
4.1
Pengujian Program Pengenalan Ucapan dengan Ekstraksi Ciri
DCT dan Pembanding (Jarak Divergensi)
Proses pengujian program bertujuan untuk mengetahui hasil kerja dari program pengenalan ucapan yang telah dibuat berjalan sesuai dengan perancangan yang dibuat. Proses pengujian didukung dengan perangkat keras dan lunak yang digunakan yaitu processor intel Core I3 2350M 2.3M , RAM 2 GB dan Matlab 7.0.4.
Proses menjalankan program Matlab 7.0.4 dapat dijalankan dengan langkah-langkah sebagai berikut:
a. Klik gambar atau simbol Matlab pada desktop laptop. Gambar 4.1. memperlihatkan simbol matlab yang tertera pada desktop laptop.
[image:71.595.87.528.379.703.2]
b. Setelah selesai klik simbol matlab pada desktop maka akan muncul tampilan awal matlab seperti diperlihatkan pada gambar 4.2.
Gambar 4.2. Tampilan awal matlab
Keterangan gambar : 1. Directory
2. Current directory 3. Command window
c. Setelah muncul tampilan awal seperti yang ditunjukkan pada gambar 4.1 maka klik pada directory dan diganti dengan directory file yang digunakan untuk menyimpan program. Pada current directory akan muncul semua file program yang sudah dibuat seperti ditunjukkan pada tanda nomor 2. Tanda nomor 3 adalah command window digunakan untuk memanggil file GUI. Cara memanggil GUI yaitu dengan mengetik nama file “Guy” pada command window setelah itu Enter maka akan muncul tampilan GUI seperti diperlihatkan pada gambar 4.3.
1
Gambar 4.3. Tampilan utama GUI setelah enter
d. Pada Tampilan utama GUI terdapat tampilan nilai-nilai sebagai variabel p