GEOMETRIS JALAN RAYA & STAKE OUT Disusun Oleh S. HENDRIATININGSIH S Edisi II 1981 JURUSAN GEODESI
Fakultas Teknik Sipil & Perencanaan Institut Teknologi Bandung
KATA PENGANTAR
Geometris Jalan Raya yang dibahas disini hanya lengkungan-lengkungan yang berbentuk sederhana yaitu Lingkaran, Spiral, Lingkaran Spiral dan Spiral-spiral untuk lengkungan Horizonmtal dan untuk lengkunagan Vertikal digunakan Lengkungan Parabola yang simetris berbentuk cekung dan cembung.
Pengetahuan mengenai Geometris Jalan Raya ini untuk dapat membayangkan bagaimana cara menghitung unsur-unsur Lengkungan yangh diperlukan untuk pematokan (stake out).
Seloain itu, juga dapat melaksankan pengukuran-pengukuran yang diperlukan untuk pembuatan pete perencanaan Jalan Raya dan pematokan.
Pada penulisan buku ini kami berpegang pada peraturan-peraturan yang dikeluarkan oleh Direktorat Jendral Binamarga.
Pengetikan dan pencetkannya dilaksankan oleh staf karyawan PPFK & Jurusan Geodesi ; untuk semua ini kami ucapkan terimakasih.
Diktat edisi ke II ini merupakan revisi dari edisi ke I Juni 1979, mudah-mudahan revisi ini lebih sempurna.
Akhir kata, semoga tulisan ini bermanfaat kiranya dan kritik serta saran-saran kami nantikan.
Bandung, Maret ‘81 Penyusun
DAFTAR ISI JUDUL : GEOMETRIS JALAN RAYA & STAKE OUT KATA PENGANTAR
DAFTAR ISI
BAB I PENDAHULUAN
1.1 Syarat Teknis Perencanaan Jalan Raya
1.1.1 Standard Perencanaan Geometri Jalan Raya 1.1.2 Jarak Pandangan
1.1.3 Penampang Melintang 1.1.4 Alinemen Horisontal 1.1.5 Alinemen Vertikal
1.2 Data Persiapan Perencanaan Jalan Raya
1.3 Pengukuran-pengukuran yang diperlukan dalam Perencanaan Jalan Raya 1.3.1. Pengukuran Titik Kontrol Horisontal dan Vertikal
1.3.2. Pengukuran Situasi Daerah Rencana Lokasi Jembatan 1.3.3. Pengukuran Penampang Melintang dan Memanjang 1.3.4. Pemasanagan Patok-Patok Tetap (B.M)
1.3.5. Perhitungan dan Penggambaran BAB II GEOMETRIK JALAN RAYA
2.1 Alinemen Horisontal 2.1.1. Tangen 2.1.2. Lengkungan Horisontal 2.1.2.1. Lingakaran 2.1.2.2. Spiral-Lingkaran-Spiral 2.1.2.3. Spiral-Spiral 2.2 Alinemen Vertikal 3.1.1 Kelandaian 2.3 Stasioning
BAB III PEMATOKAN/STAKE OUT 3.1 Pematokan Jalur Lurus
3.1.1 Pematokan Suatu Titik di Lapangan 3.1.2 Pematokan As Rencana Jalan
3.1.3 Cara Pengukuran Jarak dan Pembuatan Tangen di Lapangan 3.1.4 Pengukuran Jarak
3.1.5 Pembuatan Tangen di Lapangan 3.2 Cara Pembuatan Garis Tegak Lurus di Lapangan
3.3.1 Dengan Alat Ukur Sudut 3.3.2 Dengan Menggunakan Prisma 3.3.3 Dengan Menggunakan Pita Ukur 3.3 Problema Rintangan
3.3.4 Bila Terhalang Suatu Bangunan 3.3.5 Bila Banyak Rintangan
3.3.6 Bila Rintangan Berupa Jurang/Sungai/Danau Besar 3.3.7 Bila Letak PI Terganggu
3.4 Pematikan Lengkung Horizontal 3.5 Pematokan Busur Lingkaran
3.3.1 Cara Selisih Busur Sama Panjang 3.3.2 Cara Selisih Absis Sama Panjang 3.3.3 Cara Perpanjangn Tali Busur 3.3.4 Cara Polar/Sudut Defleksi 3.3.5 Cara Poligon
3.6 Pematokan Busur Spiral
3.3.1 Cara Sudut Defleksi 3.3.2 Cara Absis Ordinat 3.7 Problema rintangan Pada Lengkungan
3.3.1 Bila ada Bangunan disekitar Aa 3.3.2 Bila ada Bangunan Terletak Pada As 3.3.3 Bila ada Bangunan Terletak di TC/CT 3.8 Pematokan Lengkungan Vertikal
DAFTAR RUJUKAN DAFTAR LAMPIRAN
DAFTAR I : Standard Perencanaan Geometrik DAFTAR II : Standard Perencanaan Alinemen
DAFTAR III : Panjang Minimum Spiral dan Kemiringan Melintang. GRAFIK I : Pelebarab Perkerasan Pada Titik Tikungan
GAFIK II : Kebebasan Samping Pada Tikungan GRAFIK III : Panjang Lengkung Vertikal Cembung
GRAFIK IV : Panjang Lengkung Vertikal Cembung (Untuk Jalan Raya Dua Jalur) GRAFIK V : Panjang Lengkung Vertikal Cekung
BAB I PENDAHULUAN
Dalam perencanaan. jalan raya, bentuk geometriknya harus ditetapkan sedemikian hingga jalan yang bersangkutan mem berikan pelayanan yang optimal kepada lalu lintas sesuai de:-ngan fungsinya.
1.1. Syarat Teknia Perencanaan Jalan Raya :
1.1.1. Syarat teknis perencanaan jalan raya yang utama adalah memenuhi ketentuan-ketentuan dasar pera -turan perencanaan geometrik atau standar Perenca naan Geometrik Jalan Raya (lihat Daftar I) yang dikeluarkan oleh Ditjen Bina Marga, Dalam peng-gunaannya, ketentuan-ketentuan tersebut adalah lah ketentuan minum. •
1.1.2. Jarak Pandangan .
Syaratnya untuk mendapaikan keamanan lalu lintaa. Jarak pandangan ini terdiri dari 2 yaitu :
jarak pandangan henti, jarak pandangan menyiap. (lihat Daftar II) !
Jarak pandangan diukur dari ketinggian mata penge mudi kepuncak penghalang. Untuk jarak pandangan henti, ketinggian mata pengemudi adalah 125 cm dan ketinggian penghalang adalah 10 cm,sedangkan untuk pandangan menyiap, ketinggian mata pengemu di adalah 125 cm dan ketinggian penghalang ada -lah 125 cm.
1.1.3 Penampang Melintang
Penampang melintang yang digunakan harus sesuai dengan klasifikasi jalan dan kebutuhan lalu lintas dan lebar badan jalan (lihat Daftar I).
Yang termasuk dalam penampang melintang adalah : - lebar perkerasan
- lebar bahu - drainage
1.1.4 Alinemen Horisontal
Alinemen horisontal direncanakan menurut Daftar I, yang mempertimbangkan hal-hal ; penyediaan drainage dan memperkecil pekerjaan tanah yang diperlukan. Yang perlu diperhatikan pada alinemen horisontal adalah :
- Jari-jari lengkung minimum menurut miring tikungan maksimum dan koefisien gesekan melintang maksimum (Daftar I).
- Jari-jari lengkung minimum dimana miring tikungan tidak diperlukan (Daftar II).
- Lengkung peralihan (lengkung spiral) ; (Daftar II). - Pelebaran perkerasan pada tikungan (Grafik I). - Pandangan bebas pada tikungan (Grafik II). 1.1.5 Alinemen Vertikal
Alinemen vertikal sangat erat hubungannya dengan besarnya biaya pembangunan, biaya penggunaan kendaraan serta jumlah kecelakaan lalu lintas. Rencana alinemen vertikal sebaiknya mengikuti medan sehingga dapat menghasilkan keindahan jalan yang harmonis dengan alam sekelilingnya.
Yang perlu diperhatikan pada alinemen vertikal adalah: Landai maksimum (Daftar I).
Lengkung vertikal yang merupakan lengkung sederhana.parabola
Panjang minimum lengkung vertikal dembung yang berda sarkan pandangan henti dan drainage (Grafik III) untuk semua jalan dan Grafik IV berdasarkan jarak pandangan menyiap yang berlaku untuk jalan raya dua ja lur.
Panjang minimum lengkung vertical cekung yang berdasarkan jarak pandangan waktu malam dan syarat draina se (Grafik V). Khusus untuk lengkung yang berada pa da lintasan dibawah, panjangnya ditentukan oleh be -sarnya kebebasan vertikal dan jarak pandangan (Grafik VI).
1.2. Data/Persiapan Untuk Perencanaan Jalan Raya.
Peta-peta yaitu peta topografi, peta kadaster, peta geologi untuk membuat rencana trase-trase jalan.
Dari peta-peta tersebut diadakan survey penyuluhan pada rencana trase jalan yang telah dibuair.
Pengumpulan data lain, misalnya : data tanah/penyelidikan tanah
data harga tanah/bangunan lokasi material ,dll.
Dari data tersebut di atas, maka dapat dipilih jalur/trase terbaik. Pada jalur terbaik dilakukan survey pendahuluan untuk mendapatkan peta dasar dimana akan digambarkan rencana jalan tersebut.
1.3. Pengukuran-pengukuran Yang Diperlukan Untuk Perencanaan Jalan Raya
Pengukuran yang diperlukan adalah pengukuran topografi, yang dilakukan sepanjang sumbu rencana jalan dan jembatan serta daerah-daerah di sekitarnya yang diperlukan dalam pembuatan rencana detail tersebut.
Daerah yang diukur sekurang-kurangnya meliputi :
Daerah selebar 100 m di kiri-kanan rencana sumbu jalan dengan panjang 500 m dari masing-masing lokasi kepala jembatan.
Daerah sungai mencakup selebar 50 m dari masing-masing tepi sungai dengan panjang 200 m dari sumbu rencana jembatan ke arah hilir dan udik sungai.
Pekerjaan pengukuran ini meliputi :
Pengukuran titik kontrol horisontal dan vertikal. Pengukuran situasi daerah rencana lokasi jembatan. Pengukuran penampang memanjang dan melintang. Pemasangan patok-patok tetap atau pilar Bench Mark. Perhitungan dan penggambaran peta.
1.3.1. Pengukuran titik control horizontal dan vertyikal.
Pengukuran titik kontrol horisontal ini dapat berupa pengukuran poligon atau rangkaian segitiga. Pada pengukuran kontrol horisontal ini dilakukan pula pengukuran azimuth matahari.
Pengukuran titik kontrol vertical yaitu melakukan pengukuran waterpas atau sipat datar. Pengukuran tinggi yang melintasi sungai dilaksanakan dengan metoda “double level” atau “reciprocal leveling”.
Titik kontrol vertical harus diikatkan dengan titik yang telah diketahui ketinggiannya dengan pengukuran sipat datar teliti.
1.3.2. Pengukuran situasi daerah rencana lokasi jembatan.
Pengukuran ini harus mencakup semua keterangan yang ada di daerah tersebut, misalnya : rumah – rumah, pohon – pohon, batas – batas sawah, kebun, desa, sungai, saluran irigasi, arah aliran air dan lain – lainnya. Untuk ini, pengukuran dapat dilakukan dengan cara tachymetri.
1.3.3. Pengukuran penampang memanjang dan melintang.
Pengukuran ini dilakukan sepanjang rencana sumbu jalan dan tegak lurus sumbu jalan dengan interval 25 m – 50 m.
Lebar pengukuran penampang melintang meliputi daerah sejauh 50 meter – 100 meter. Titik – titik yang perlu diperhatikan ialah bagian dasar & atas gorong – gorong, atau selokan, saluran irigasi, tebing sungai dan juga dilakukan pengukuran penampang memanjang dan melintang dari sungai yang dilewati rencana sumbu jalan/jembatan.
1.3.4. Pemasangan patok – patok tetap atau pilar Bench Mark.
Patok – patok titik control dibuat dari beton, sedangkan patok – patok polygon dan profil dibuat dari kayu. Patok – patok tersebut ditempatkan pada tempat – tempat yang permanent dan mudah ditemukan kembali, biasanya patok – patok tersebut diberi cat supaya mudah ditemukan kembali.
1.3.5. Perhitungan dan penggambaran peta.
Hitungan yang dilakukan adalah menghitung koordinat titik – titik polygon utama setelah diratakan, dan dihitung tinggi dari pengukuran waterpass serta hitung – hitungan dari pengukuran situasi.
Setelah data – data ukuran selesai dihitung, maka dilakukan penggambaran dengan sustu skala, biasanya untuk horizontal skala 1 : 1000, sedangkan untuk skala vertikal adakalah skala 1 : 100.
BAB II
GEOMETRIK JALAN RAYA 2.1. Alinemen Horisontal
Yang dimaksud dengan alinemen horisontal atau trase suatu jalan adalah proyeksi dari rencana sumbu jalan, tegak lurus pada bidang datar (peta).
2.1.1. Tangen
Tangen merupakan bagian – bagian lurus dari trase.
Tangen tangen tersebut dihubungkan dengan lengkungan – lengkungan yang berupa busur lingkaran atau busur peralihan yang berupa spiral.
Lengkungan – lengkungan yang dihubungkan tangen yang satu dengan yang lainnya disebut dengan istilah tikungan atau lengkungan horisontal.
2.1.2. Lengkungan Horisontal
Bentuk lengkungan yang biasa digunakan adalah a. Lingkaran
b. Spiral – Lingkaran – Spiral c. Spiral – Spiral
Tidak semua lengkungan boleh berbentuk lingakaran ini tergantung pada besarnya kecepatan rencana serta jari – jari lingkaran itu sendiri (Daftar III).
2.1.2.1 Lingkaran
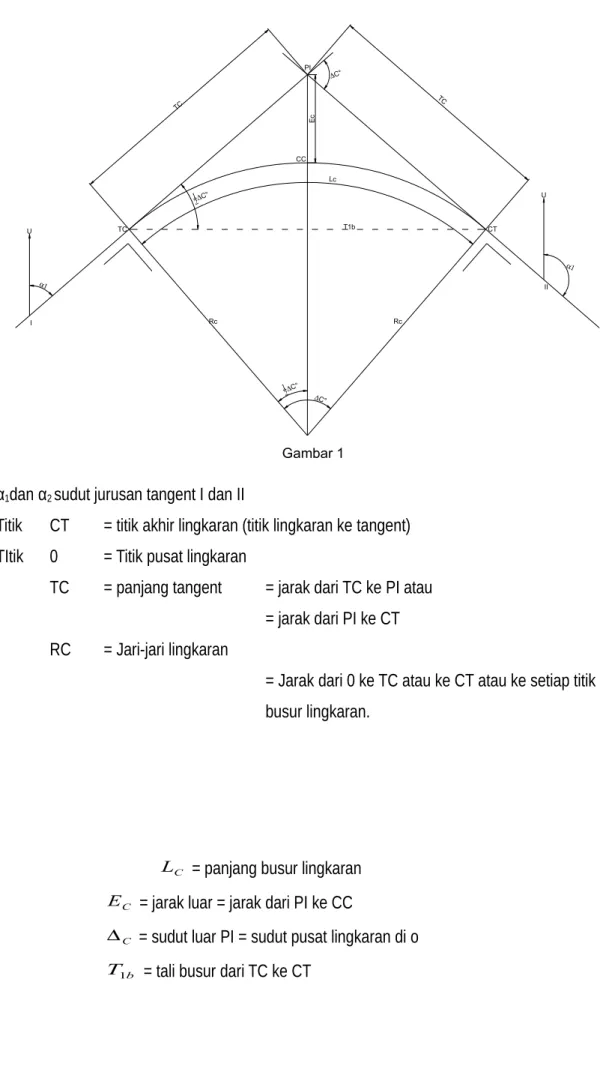
(Lihat gambar 1 dihalaman berikut) ! Keterangan gambar
Titik CC = titik tengah busur lingkaran
Titik TC = titik tengah awal lingkaran (titik tangent ke lingkaran) Titik PI = titik perpotongan tangen (point of intersection)
Gambar 1 U U II I CC TC CT Rc Rc T1b PI C° E c Lc C° C° C° TC TC
α1dan α2 sudut jurusan tangent I dan II
Titik CT = titik akhir lingkaran (titik lingkaran ke tangent) TItik 0 = Titik pusat lingkaran
TC = panjang tangent = jarak dari TC ke PI atau = jarak dari PI ke CT RC = Jari-jari lingkaran
= Jarak dari 0 ke TC atau ke CT atau ke setiap titik di busur lingkaran.
C
L = panjang busur lingkaran
C
E = jarak luar = jarak dari PI ke CC
C
= sudut luar PI = sudut pusat lingkaran di o
b
T1 = tali busur dari TC ke CT
C C b C o C C C C C C C C C C R T R L T cis R E R T 2 1 1 4 1 2 1 2 1 sin 2 ; 2 360 tan 1 1 tan
Untuk dapt menggunakan rumus – rumus tersebut di atas, maka sebelumnya haruslah diketahui jari – jari lingkaran RC dan C yang dihitung dari arah tangent – tangent tersebut
C 2 1
, atau dengan koordinat titik – titik pada tangent.2.1.2.2.Spiral-lingkaran-spiral
Pada bentuk ini, bagian spiral merupakan perubahan dari bagian lurus kebagian lingkaran, sehingga dikenal istilah lengkung peralihan.
Istilah “peralihan” dalam hal ini dimaksudkan untuk menyatakan perubahan jari – jari secara berangsur – angsur dari tak terhingga pada awal lengkungan sampai dengan jari – jari busur lingkaran yang bersangkutan.
Bentuk lengkung spiral-lingkaran-spiral digunakan karena pada perencanaan jalan raya tersebut dipertahankan kecepatan rencananya sedangkan jari – jari lingkaran tersebut tidak dapat memenuhi syarat
standar Geometrik Perencanaan jalan Raya, sehingga jari – jari lingkaran yang digunakan berada di bawah harga – harga yang telah ditetapkan (Daftar III) !
(lihat gambar 2 di halaman berikut) !
Keterangan gambar :
Titik TS = titik awal spiral= titik dari tangen ke spiral. Titik SC = titik dari spiral ke lingkaran.
Titik CC= titik tengah busur lingkaran. Titik CS = titik dari lingkaran ke spiral. Titik TS = titik dari spiral ke tangen.
Titik V = titik perpotongan tangen lingkaran. Titik PI = titik perpotongan tangen spiral.
OG
RC = OSC=OCC=OH
RC = jari-jari lingkaran
LC = panjang busur lingkaran = busur SO - CO – OS
EG = jarak luar busur lingkaran = V - CO
∆C = sudut luar di V
TC = panjang tangen lingkaran
p = pergeseran tangen terhadap lingkaran (shift) p = jarak dari A ke G
k = absis dari p pada garis tangen spiral k = jarak dari TS ke A
LT = long tangen = jarak dari TS ke B ST = s short tangent = jarak dari B ke SO
Garis B-SC-V adalah garis singgung di SO yang tegak lurus jari-jari RC, demikian juga
XS = absis titik SO pada garis tangenӨ
YS = ordinat titik SO pada garis yang tegak lurus garistangen.
Tt = panjang tangen total = jarak dari TS ke PI Өs = sudut spiral = I C-B-SC = LA-O-SC = LCS-O-D. ∆= sudut luar di PI = 2 -Өg + ∆ Q
Et = jarak luar total = jarak PI ke CC
C = sudut lentur spiral = PI-TS-SC = PI-ST-GS
I = S S S C L . 1 3 1 2 CS = k»reksi spiral = 0.0031 ӨS3
i= sudut lentur spiral bila li = panjang busur spiral dari TS atau ST ketitik i pada busur spiral (i ti
tik pada busur spiral).
Bila titik i = titik SO atau SO, maka Ii = LS
Jadi = i C S CS 3
1
Biasanya pada perencanaan jalan raya telah diketahui V kecepatan rencana dan jari-jari lengkungan RC. Dari kedua unsur tersebut maka akan didapat harga Ls (Daftar III) dan
harga-harga lainnya yang dihitung dengan menggunakan rumus rumus sbb : 1) C S S R L 2 radial = . 2 C S R L 2) S S S i C L L i 2 3 1 Cs diabaikan bila s
15o Bila s ≤ 15o maka Cs = 0,0031 s(Cs dalam sekon s dalam derajat)
Cs s c 3 1 3) 2 2 5 . 40R LS Ii Ii Xi C
Bila I dititik Cs atau Sc maka :
cos 40 . 40 3 2 S C S S S C S S S L R L L L R L L X 4) S C i L R L Yi . 6 3 ,bila I = SC=CS maka:c L R L L R L Ys S C S S C S sin 6 . 6 3 5). p = Yq - Rr (l - cos -eq) 6). K = Xs - Rr (l - sin -eq) 7). Et = 2 1 cos C R - Rc 8). Tt = (Rc + P) tan 2 1 + K 9). Lt = s YS tan 10) ST = s YS sin 11). c = - 2 s 12). Lc = c . Rc 13). Tc = Rc tan 2 1 c 14). Ec = Tc tan 4 1 c 2.1.2.3. Spiral-spiral
Pada lengkungan yang berbentuk spiral-spiral prin sipnya adalah sama dengan lengkungan spiral ling-karan-spiral , hanya disini panjang busur lingkar-an LC = 0, sehingga c
=0, jadi :
= 2 s + c = 2 s , maka didapat bahwa :
s =
2 1
Menghitung besaran bagian spiral-spiral sama dengan menghitung besaran-besaran pada Bab 2.1.2.1. ; No. 1 s/d 10.
2.2.1. Kelandaian
Kelandaian jalan adalah naik/turunnya jalan yang dinyatakan dalam ± % (persen). Kelandaian + % berarti jalan itu naik, sedangkan kelandaian - % berati jalan itu turun.
Antara kelandaian-kelandaian tersebut dihubungkan dengan suatu lengkungan vertikal yang berbentuk lengkungan parabola sederhana yang simetris.
Lengkungan vertikal pada jalan raya merupakan lengkungan yang dipakai untuk mengadakan peralihan secara berangsur-angsur dari suatu landai berikutnya.
Lengkung vertikal disebut cembung apabila titik potong antara kedua tangent yang bersangkutan (PVI) ada di atas permukaan jalan, dan disebut cekung apabila titik perpotongannya (PVI) berada dibawah permukaan jalan.
Pada lengkungan vertikal digunakan lengkungan parabola sederhana simetris karena pertimbangan-pertimbangan sebagai berikut :
Volume pekerjaan tanah
Panjang jarak pandangan yang dapat di peroleh pada setiap titik lengkungan vertikal. Kenyamanan untuk pemakai jalan
Perhitungan-perhitungannya mudah. Stas. no. O R D I N A T kesalahan THROW t 2(d+t) diukur diperbaiki m 1 0 0 0 0 0 2 5 4 +1 0 +2 3 7 8 -1 +2 +2 4 11 12 -1 +2 +2 5 16 16 0 0 0 6 17 16 +1 -2 -2 7 16 16 0 -2 -4 8 13 12 +1 -2 -2 9 7 8 -1 0 -2 10 4 4 0 0 0 11 0 0 0 0 0 Jumlah 96 96 0
=ordinat-ordinat yang di ukur pada tiap-tiap stasiun dan
m = ordinat-ordinat yang di sesuaikan dengan mengambil ditengah-tengah yang sama (bagian lingkaran) dan di bagian spiral liniair (dengan penambahan yang sama) dan di bagian tangent 0, dengan catatan bahwa jumlah ordinat diukur sama dengan jumlah ordinat-ordinat diperbaik.
Biasanya akan di dapat “throw” terakhir tidak 0, tapi ini harus 0 dengan penyesuaian lagi di beberapa koordinat.
6.8.6. Membuat throw terakhir menjadi 0.
Dengan mengambil dari : ;
kita dapatkan
2.2.2.1. Lengkungan vertikal parabola cembung.
Titik PLV = Titik awal lengkungan parabola Titik PVI = Titik perpotongan kelandain g1 dan g2
Titik PTV = Titik akhir lengkungan parabola
Garis PLV = PVI dan PVI – PTV adalah garis tangent landaian g1 % dan g2 %.
Pada Gambar 4 : g1 % naik, jadi harganya + %
g2 % turun, jadi harganya - %
A = Perbedaan aljabar landai = g2 – g1 dalam %
EV = Pergeseran vertikal titik tengah busur lengkungan.
LV = Panjang lengkung vertikal dihitung secara horizontal.
XI = Jarak horizontal titik I, dihitung dari PLV ketitik I secara horizontal
YI = Pergeseran vertikal titik I, dihitung dari titik pada tangent /
kelandaian ketitik I pada lengkungan secara vertical. Titik I = Titik pada lengkungan
Rumus – rumus yang digunakan untuk menghitung unsur – unsur pada lengkungan parabola cembung adalah :
800
V V
L A
E (dalam meter) ; EV (-) parabola cembung
8 V V L A E EV (+) parabola cekung dimana : Ag2 g1 dalam % V
L panjang lengkung vertikal (dalam meter) yang dihitung/didapat dari Grafik III, IV, V, VI (terlampir) berdasarkan kecepatan rencana V dan A.
2 2 200 2 1 i V V V i i X L A E L X Y Jika Xi 2LV 1 , maka Yi EV % 100 2 1 . . . . 1 V L PLV titik tinggi PVI titik tinggi g % 100 2 1 . . . . 2 V L PVI titik tinggi PTV titik tinggi g
Tinggi titik PVI, PLV dan PTV dilihat dari peta perencanaan. .2.2.2. Lengkungan vertikal parabola cekung
.
Titik PLV = titik awal lengkungan
Titik PVI = titik perpotongan kelandaian g1 dan g2
Titik PTV = titik akhir lengkungan
Pada gambar 5 : g1 % turun, jadi harga g1 adalah - % Lv 1 2 Lv 12 Lv Xi Xn n PLV PTV Yi Ev A Yn PVI g1 % g2 %
g2 % naik, jadi harga g2 adalah + %
A = perbedaan aljabar landai dalam % = g2- g1
EV = pergeseran vertikal.
LV = panjang lengkung vertikal yang dihitung secara horizontal.
Xi = jarak horizontal titik i, dihitung dari titik PLV ke titik i secara horizontal.
Yi = pergeseran vertikal titik i
Titik i titik pada lengkungan.
Rumus-rumus yang digunakan pada lengkungan parabola cekung sama dengan rumus-rumus yang digunakan pada lengkungan vertikal cembung.
Untuk menghitung tinggi titik-titik di lengkungan parabola, baik cembung maupun cekung dapat digunakan rumus sebagai berikut :
TX = TPLV +
100
1X
g
+ Y
dimana : TX = tinggi suatu titik di lengkungan parabola yang berjarak horizontal sebesar X
meter dari titik PLV.
TPLV = tinggi titik PLV (dalam meter).
g1 = kelandaian dalam %
X = jarak horizontal suatu titik pada lengkungan dari titik PLV. Y = . 2
200L X
A V
(dalam meter).
A = Perbedaan aljabar landai (dalam %)
LV = Panjang horizontal lengkung vertical parabola (dalam meter)
Bila tinggi titik-titik tersebut dihitung dari titik PTV, maka menggunakan rumus sbb: TX = TPTV – g2 X + Y
100
Dimana : TX = tinggi suatu titik dilengkungan parabola yang berjarak horizontal sebesar X
meter dari titik PTV.
TPTV= tinggi titik PTV (dalam meter)
X = jarak horizontal suatu titik di lengkungan dari titik PTV. Y = A . X2
200 LV
A = perbedaan aljabar landai dalam %
LV = panjang horizontal lengkung vertical parabola (dalam meter)
Menghitung tinggi titik PLV, PTV dari PVI atau sebaliknya adalah sebagai berikut : TPLV = TPVI – g1 . LV
100 2 TPTV = TPVI – g2 . LV
101 2 Dimana : TPLV, TPVI, TPTV dalam meter
g1, g2 dalam % : LV dalam meter
Atau sebaliknya bila akan menghitung tinggi titik PVI dari PLV dan PTV adalah sbb : TPVI = TPLV + 2 . 100 1 Lv g TPVI = TPTV - 2 . 100 2 Lv g 2.2.3 Diagram Superelevasi
Diagram ini merupakan suatu cara untuk menggambarkan pencapaian superelevasi, dari lereng normal kemiringan melintang ( superelevasi ).
Yang dimaksud dengan kemiringan melintang jalan ( superelevasi ) adalah profil dari badan jalan secara melintang.
Pada jalan lurus, kemiringan melintang badan jalan ( superelevasi ) e = 2 % atau e = 0,02 m/m merupakan kemiringan melintang yang minimum ( normal ). Kemiringan melintang maksimum untuk jalan adalah :
e = 10 % = 0,1 m/m hal ini untuk keperluan system pola aliran ( drainage ) yang efektif. Kemiringan melintang dapat dilihat pada Daftar III dengan menggunakan kecepatan rencana V dan jari-jari Rc.
As jalan
Badan jalan
ki=kiri(-) kanan=ka(-) Lebar jalan
Gambar 6 kemiringan melintang pada jalan lurus.
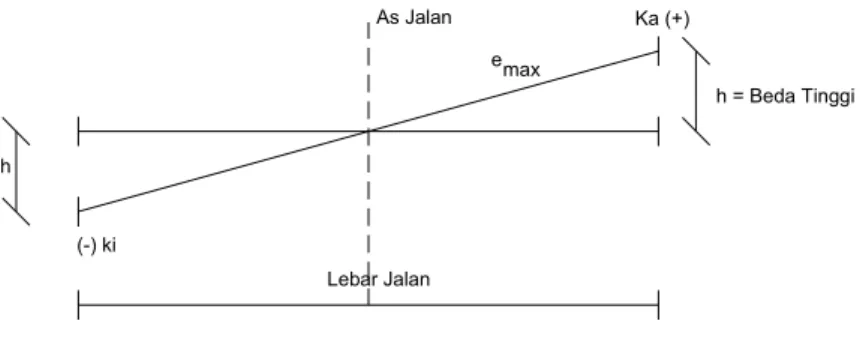
Lebar Jalan Ka (-) h = Beda Tinggi As Jalan e (+) ki h max
Gambar 7 Kemiringan melintang pada tikungan yang belok kekanan
h = Beda Tinggi (-) ki Ka (+) As Jalan emax h Lebar Jalan
Gambar 8 Kemiringan melintang pada tikungan yang belok kekiri h = beda tinggi, dalam meter
b = lebar jalan, dalam meter e = super elevasi, dalam %
h = b.e % h = b.
Diagram super-elevasi pada tikungan bentuknya ter gantung dari bentuk lengkungan yang ada, yaitu
1. lingkaran
3. spiral-spiral
2.2.3.1 Diagram super-elevasi pada lingkaran
Dari peta rencana tercantum data lengkungan diantaranya ada data emax, V dan b.
Dengan data V maka Lm = landai relative dari Daftar II. Dengan data emax dalam %,b dalam meter.
maka dapat dihitung Ls untuk lengkungan lingkaran untuk menggambar diagram super-elevasinya,
LS = m x e total x b
Dimana : e total = e max + e normal (dalam satuan m/m) Dengan uraian sebagai berikut :
Dimana : e max = e % = e m/m
100
e normal = 2 % = m/m
100 2
kemudian dirubah kedalam satuan meter ,maka : e max = e b eb m 100 . 100
total
eb b
e
b
meter meter b bmeter b normal b e b e 100 2 100 2 100 2 2 100 2 Jadi : LS m b
2e
100 meterSetelah didapat LS maka didapat gambar sbb : S
L
4 1
dilukis sebelah kanan garis TCTC
S L
4 1
dilukis sebelah kiri garis CT CT
S L
4 3
dilukis sebelah kiri garis TCTC
S L
4 3
Gambar 9.a : Gambar lengkungan horisontal berbentuk lingkaran (jalan/belokan dilihat dari atas)
Gambar 9.b : Diagram super-elevasi lengkungan lingkaran.
Gambar 9. c : Gambar profil melintang badan jalan dari lengkungan lingkaran
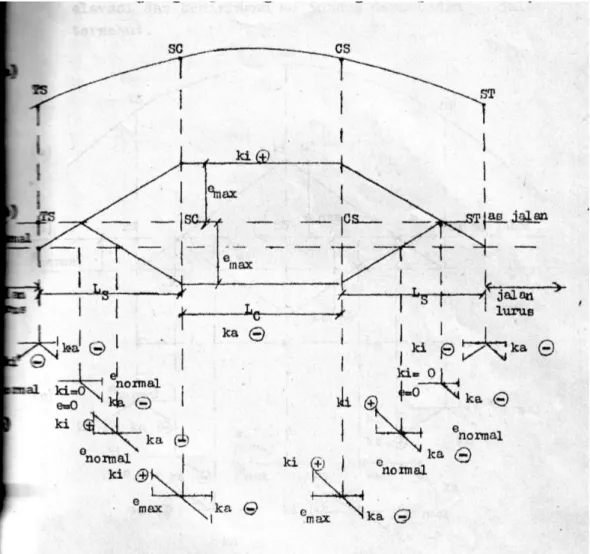
2.2.3.2. Diagram super-elevasi lengkungan spiral-lingkaran-spiral: Dari peta perencanaan lengkungan horisontal terdapat data Ls,LC,emax
Jadi langsung dapat digambar diagram super-elevasinya.
10a : Gambar lengkungan horisontal berbentuk spiral-lingkaran spiral. 10b : Diagram super-el'evasi lengkungan apiral-lingkaran-spi -ral.
27
2.2.3.3. Diagram Super Elevasi Lengkungan Spiral – Spiral
Dari peta perancanaan lengkungan Horizontal terdapat data – data Ls dan emax .
Dari data – data tersebut dapat digambar diagram – diagram Super Elevasi dan kemringan melintang dari badan jalan tersebut.
gamabar
Gambar 11. a : gambar lengkungan horizontal berbentuk spira – spiral Gambar 11. b : Diagram Super Elevasi Lengkungan Spiral - Spiral Gambar 11. c : gambar profil badan jalan dari lengkungan Spiral - Spiral
28
3.3 Stasioning
Stasioning dimulai dari titk awal proyek dengan nomor stasion 0 + 000. Angka sebelah kiri tanda + menunjukan kilometer sedangkan sebekah kianan tanda + menunjukan meter. Angka stasiona bergerak keatas dan tiap 50 meter dituliskan pada gambar perencanaan. Kemudian nomor stasion pada titik utama stasion yaitu : TS, SC, CS, ST atau TC serta Pi harus dicantumkan ; pemberian nomor diakhiri pada titik akhir proyek.
GAMBAR
Cara melkukan stasioning adalah sebagai berikut : dengan diketahuinya koordinat titik awal proyek pada sta 0 + 000 dan koordinat titik – titik PI1 , PI2 ...dst. maka dapat dihitung jarak –
jarak d1, d2, d3,….dst
Jarak – jarak d ini untuk menghitung stasion PI sebagai berikut : PI 1 sta . . + . . = (Sta 0 + 000 ) + d1
PI 2 sta . . + . . = (PI 1 sta . . + . . ) + d2
TS sta . . + . . = (PI 1 sta . . + . . ) - Tt
SC sta . . + . . = (TS sta . . + . . ) + Ls
CS Sta . . + . . = (SC Sta . . + . .) + LC
ST Sta . . + . . = ( CS Sta . . + . .) + LS
Kemudian untuk lengkungan yang kedua juga dihitung dari (PI2 Sta . . + . .), jadi :
TS Sta . . + . . = (PI2 Sta . . + . .) - TS
SS Sta . . + . . = (TS Sta . . + . .) + LS
ST Sta . . + . . = (SS Sta . . + . .) + LS
Untuk stationing selanjutnya sampai dengan stasion akhir, cara melakukannya sama dengan cara sebelumnya (dihitung dulu Sta PI).
BAB III.
PEMATOKAN/STAKE OUT
Pematokan/Stake out adalah memindahkan atau mentransfer titik-titik yang ada dipeta perencanaan kelapangan (permukaan bumi).
3.1 Pematokan Jalur Lurus
Pematokan jalur lurus pada jalan raya adalah pematokan tangent atau garis lurus yang menghubungkan antara dua titik PI.
Pada pematokan tangent, dilakukan pada jarak setiap 50cm dan pemasangan pilar (Bench Mark) pada jarak maximal 500 meter.
Sebelum melakukan pematokan pada tangent, maka haruslah ditentukan terlebih dahulu station awal/titik awal rencana sumbu jalan tersebut.
3.1.1 Pematokan suatu titik dilapangan
Untuk menentukan titik/station awal dari rencana sumbu, diperlukan minimal dua pilar Bench Mark yang ada dilapangan dengan diketahui koordinatnya. Jadi pada waktu akan membuat peta perencanaan, harus dipasang minimal dua buah pilar BM pada awal sumbu rencana jalan dan diukur/dihitung koordinatnya.
Misalkan Sta 0 + 000 mempunyai koordinat (X0 + Y0) yang didapat dari peta perencanaan
secara grafis, dan Sta 0 + 000 adalah titik yang akan dicari letaknya dilapangan dan dalam hal ini, sebagai pegangan (referensi) dipakai titik-titik Bench Mark (Xa,,Ya) dan Bench Mark B (Xb,,Yb).
Untuk menentukan titik awal Sta 0 + 000 dapat dilakukan dari A atau dari B, tergantung dari situasi dan kondisi dari medannya tetapi sebaiknya dilakukan dua kali yaitu dari A dan B, sehingga ada suatu koreksi.
Sta 0+000 (Xo, Yo) dbo U BM . B(Xb, Yb) bo ba dab dao BM . A(Xa, Ya) ao ab U Gambar 13
a). Mematok Sta 0 + 000 dari titik A :
Sebelum melakukan pematokan, terlebih dahulu menghitung besaran-besaran yang diperlukan untuk pematokan, adalah sebagai berikut.
1. Hitung azimuth / sudut jurusan garis AB (ab) : Ya Yb Xa Xb ab tan ab = … … ‘ …’’
2. Hitung sudut jurusan garis AO ((ao) : Ya Yo Xa Xo ao tan ao = … … ‘ …’’
3. Hitung sudut α = < OAB α = ab – αao 4. Hitung jarak AO = dao
2
2 cos sin a o a o ao a o ao a o ao Y Y X X atau Y Y atau X X d 5. Cara pematokannya sebagai berikut :
Letakan alat ukur sudut diatas titik Bench Mark A dan atur alat tersebut
Arahkan alat ukur tersebut ketitik BM-B, misalkan bacaan lingkaran horisontalnya = I1
Kemudian putar alat ukur searah jarum jam sehingga bacaan lingkaran horisontalnya = I1
+ (3600 - α ).
Ukurkan jarak sepanjang dao yang searah dengan garis bidik teropong pada.***).
Dengan demikian letak titik Sta 0 + 000 dapat dipatok
b). Mematok Sta 0 + 000 dari titik B : 1. Hitung sudut jurusan garis BA ( αba) :
b a b a ba Y Y X X tan
...'..."
...
0
ba
PI2 (X2,Y2) 12 PI1 (X1,Y1) tangen II tangen I ab BM.B(Xb,Yb) Sta 0+000
2. Hitung sudut jurusan BO (αbo) :
b a b a ba Y Y X X tan
...'..."
...
0
ba
3. Hitung sudut = < OBA Β = αao – αba 4. Hitung jarak BO = dbo
2
2 cos sin b o b o bo b o bo b o bo Y Y X X atau Y Y atau X X d 5. Cara pematokannya sebagai berikut :
Letakkan alat ukur sudut diatas titik BM-B dan atur alat tersebut
Arahkan alat tersebut ketitik BM-A, dan baca lingkaran horisontalnya, misalkan= I2
Kemudian putar teropong tersebut searah dengan arah jarum jam , sehingga bacaan
lingkaran horisontalnya = I2 + β
Ukurkan jarak sepanjang dbo yang searah dengan garis bidik teropong pada ***).
Dengan demikian letak titik Sta 0 + 000 dapat dipatok.
3.1.2. Pematokan As/Sumbu Rencana Jalan
Pematokan As/Sumbu rencana jalan disini adalah pematokan tangent atau garis lurus yang menghubungkan antara dua titik PI atau titik awal dengan titik PI.
Pematokan pada lengkungan, dimana lengkungan juga termasuk sumbu rencana jalan akan dibicarakan tersendiri.
Sebelum dilakukan pematokan jarak setiap 50 m pada tangent, terlebih dahulu harus menetapkan arah dari tangent tersebut dilapangan.
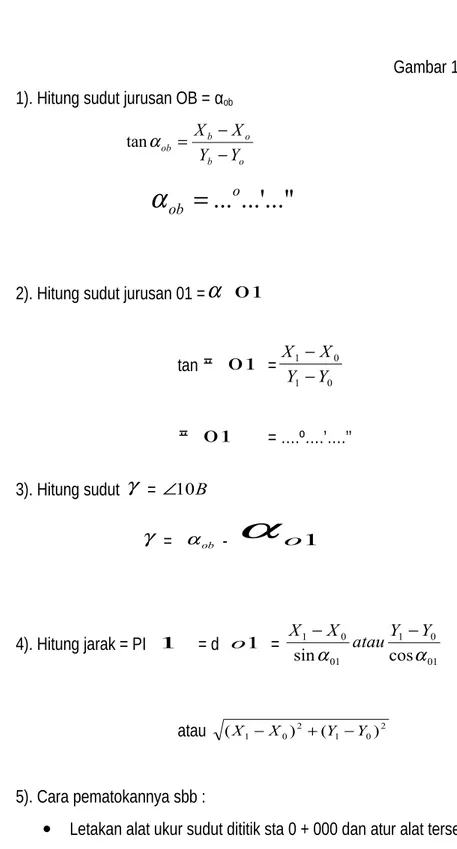
Gambar 14 1). Hitung sudut jurusan OB = αob
o b o b ob Y Y X X tan
ob
...
o...'..."
2). Hitung sudut jurusan 01 =
01tan 01 = 0 1 0 1 Y Y X X 01 = ….º….’….’’ 3). Hitung sudut = 10B = ob -
o1 4). Hitung jarak = PI 1 = d o1 = 01 0 1 01 0 1 cos sin Y Y atau X X atau 2 0 1 2 0 1 ) ( ) (X X Y Y 5). Cara pematokannya sbb : Letakan alat ukur sudut dititik sta 0 + 000 dan atur alat tersebut.
Arahkan alat tersebut ketitik B dan baca lingkaran horisontalnya, misalkan = 13
Kemudian putar teropong tersebut searah jarum jam sehingga bacaan lingkaran horisontalnya = 13 + ( 360 - )
Ukurkan jarak setiap 50 m yang searah dengan garis bidik teropong sampai dengan jarak dari Sta 0 + 000 ketitik P11 sehingga titik P1 1 dapat dipatok.
Gambar 15c Gambar 15b Gambar 15a A A B h X C B D d D d A d B pita ukur
Setelah titik P11 dipatok maka titik P1 2 juga dapat dipatok dengan data – data
hitungan 12 atau dari data lengkungan.()
Gambar 15a.
Dua titik A dan B diukur jaraknya, langsung diatas tanah didapat sebesar d, dimana d adalah jarak miring, bila permukaan tanah antara A dan B miring seperti gambar 15b dan 15c.
3.1.3. Cara pengukuran jarak dan pembuatan tangent (garis lurus) dilapangan 3.1.3.1. Pengukuran jarak :
Cara pengukuran jarak dengan pita ukur tergantung pada situasi medannya. Ada beberapa cara, yaitu sbb :
a. Diletakan langsung diatas tanah (gambar 15)
b. Jarak mendatar diukur langsung dengan memakai unting-unting(gambar 16) Pada cara a), harus diperhitungkan kemiringan/kelandaian permukaan tanah yang di ukur, hal ini dapat dipecahkan dengan cara mengukur sudut vertika Ѳatau beda tinggi antara titik-titik yang diukur jaraknya.
Gambar 15 d
Jarak yang diukur adalah d = jarak miring, yang diperlukan adalah jarak mendatar D Diukur sudut Ѳ dengan alat ukur sudut vertikal (clinometers)
Maka jarak mendatar D = d cos Ѳ. Sudut Ѳ dibaca dari clinometers. Gambar 15c
Cara mengukur jarak dengan memakai koreksi Koreksi kemiringan = x.
Jarak yang diukur jarak miring d. Beda tinggi titik A dan B = h.
Jarak yang diperlukan adalah jarak datar D, maka dari ABC di dapat : d 2 = D2 + h2
dari gambar terlihat : D = ( d – x ) maka : d2 = ( d – x )2 + h2 d2 = d2 - 2d x + x2 + h2 2dx = x2 + h2 d h d x x 2 2 2 2
karena x kecil, maka
d
x
2
2
kecil sekali, sehingga :
d
x
2
2 0 ( diabaikan ) jadi : d h X 2 2 = koreksi kemiringan jarak mendatar D = d = d h 2 2pada cara b), yaitu jarak mendatar diukur langsung dengan menggunakan unting-unting adalah sebagai berikut :
D Pita ukur A Unting-unting B unting gambar 16a d1 A d2 d3 d4 d5 D B Gambar 16 b.
Pada gambar 16a. cara pengukuran jarak titik A dan B, bila A dan B berdekatan. Gambar 16b.
Bila jarak antara titik A dan B jauh, maka dilakukan pengukurannya sebagian-sebagian, jadi jarak datar D = d1 +d2 +d3 + d4 ………
3.1.3.2. Pembuatan Tangen di Lapangan :
Setelah letak titik awal, arah dan panjang tangent di ketahui, maka pada prinsipnya pembuatan tangen dilapangna dapat dilakukan sebagai berikut :
U
α tangen PI
Sta 0+00 Sta 0+100 Sta 0+150 Sta 0+200 Sta 0+300
Sta 0+050 Sta 0.250
Gambar 17.
Misalkan titik Sta 0 + 000 telah diketahui letaknya dilapangan dan arah tangen tersebut telah diketahui pula, maka pemasangan patok setiap 50 m pada pada garis tangen adalah sebagai berikut :
Berdirikan alat ukur pada titik Sta 0 + 000, buat arah α1 (arah tengen tersebut) dan
ukuran pita ukur 50 m kemudian dipasang patok kayu yang merupakan titik Sta 0 + 050, demikian seterusnya sampai ±300 m.
Kemudian pindahkan alat ukur sudut di Sta 0 + 300, arahkan ke titik Sta 0 + 000 putar terpotong dalam keadaan luar biasa, ukur jarak 50 m, pasang patok pada Sta 0 + 350, demikian seterunya sampai dengan PI.
3.1.4 Cara Pembuatan Garis Saling Tegak Lurus di Lapangan
Ada beberapa cara pembuatan garis saling tegak lurus di lapangan, diantaranya dengan menggunakan alat-alat sbb :
a. Dengan menggunakan alat ukur sudut (theodolite) b. Dengan menggunakan prisma
c. Dengan menggunakan pita ukur
3.1.4.1 Dengan menggunakan alat ukur sudut
Misalkan alat ukur sudut di titik TC (lihat Gbr 18a). Arahkan alat tersebut (teropong) ke titik P1, baca lingkaran horisontalnya sampai menunjukan angka 1+900, maka garis
Gambar 18a.
3.1.4.2. Dengan menggunakan prisma : Ada tiga macam alat prisma, yaitu : a. Cermin sudut
b. Prisma segitiga
c. Prisma double (prisma ganda)
- Dengan menggunakan cermin sudut, prinsipnya adalah sbb :
Gambar 18b.
Prinsip kerjanya sama dengan prisma
segitiga, tetapi disini dalam hal membuat Sudut 900
Gambar 18d.
Berdiri dititik P diarahkan Ke Q, bila bayangan titik A dan B terlihat pada prisma tersebut berarti garis PQ tegak lurus AB.
3.1.4.3. Dengan menggunakan pita ukur :
Banyak cara dalam hal menggunakan pita ukur untuk membuat garis saling tegak lurus dilapangan, diantaranya sbb : Q 5 4 R 3 P Gambar 18e. A P B
Dengan mengukur jarak-jarak dimana perbandingan PR : PQ : QR = 3 : 4 : 5,maka garis PQ akan tegak lurus PR.
Q
A P B Gambar 18f.
Dengan membuat jarak PA = PB,kemudian dari A dan B dibuat jarak-jarak AQ = BQ mka perpotongan AQ dan BQ adalah titik Q dimana PQ tegak lurus AB.
3.1.5 Problema Rintangan
Pada pematokan jalur lurus/tangent seperti pada Bab 3.1.3 tidak sselamanya dapat dilaksanakan,ini tergantung keadaan /situasi lapangannya
Bila ternyata dilapangan ternyata ada halangan/rintangan pada jalur/tangent, maka banyak cara pematokan jalur/ tangent tersebut, diantaranya adalah :
3.1.5.1 Bila terhalang oleh sebuah bangunan/ sungai kecil. Ada empat cara mengatasinya, adalah sebagai berikut :
a. Dengan meuat empat kali sudut 90°
Jarak CF = jarak DE =
bangunan
Jarak CD = jarakEF b. Dengan cara membuat segitiga samasisi
A B D E F C tangen 90° 90° 90° 90° Gambar 19a
Jarak BD = jarak BC = jarak CD
c)
Gambar 19c. Jarak CD = jarak DE
Jarak CE = 2 CD cos α = 2 DE cos α. d) Dengan cara membuat segitiga siku-siku
Jarak CE = CD tan α CE = A B D C tangen 60° 60° 120° 120° Gambar 19b sungai A B C D E tangen 540-2 A B C D E tangen 270 -90°
CE =
Gambar 19d. 3.1.5.2. Bila ternyata banyak rintangan di lapangan.
Cara pembuatan tangen adalah sebagai berikut. a). Dengan membuat garis sejajar jalur/tangent
Gambar 20a. Jarak BC = Jarak DE = d Jarak BE = Jarak CD b). Dengan cara membuat segitigfa segitiga sebangun
Gambar 20b 4 2 4 1 d BF BD d d BF BC D d3 = . d4 E D d A d A d A d C d B A d4 d3 d2 d1 F E D C B A
Jarak BG = . d4
3.1.5.3. Bila rintangannya berupa jurang atau sungai besar a). Dengan cara membuat segitiga siku – siku.
A B sungai C γ Gambar 21a. Jarak BD = BC tan γ A α C sungai 900 B Gambar 21b. Jarak AC = AB cos α
b). Dengan cara segitiga sama sisi Danau A C 60 240 240 0 0 0 Gambar 21d. Jarak AC = Jarak AB = Jarak BC c). Dengan cara segitiga sembarangan
A C
B
Sungai
DANAU 2 AC = AB2 + BC2 - 2 AB
BC
cos
Dimana BC = AC
sinsincos Jadi : AC2= AB2 + (AC
sin sin )2 - 2 AB
AC
sin cos sinMaka AC dapat dihitung Yang diukur
, dan ABd). Dengan cara segitiga sebangun.
Gambar 21f. Yang diukur jarak-jarak : AC, CE, ED,
, & 180 -
. Maka jarak AB = AC
EC DE atau = CB
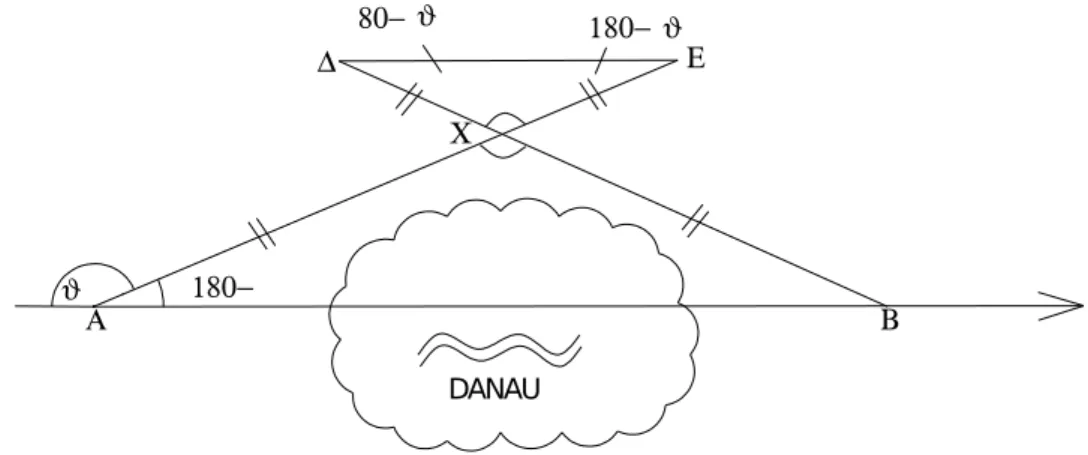
CD DEe). Dengan cara segitiga sama dan sebangun
Gambar 21g. danau C D E B A 180 - 180 -
Maka jarak AB = Jarak DE
3.1.5.4 Bila letak PI terganggu (tidak dapat) ditempati alat ukur sudut
Dalam hal mengukur sudut di PI bila letak PI terganggu dapat dilaksanakan sebagai berikut :
Pada garis tangen terletak titik B pada tangent I dan C pada tangent II. Maka untuk mendapatkan sudut ∆ di PI dapat dihitung dengan mengatur sudut-sudut di titik B dan C yaitu β dan γ.
Jadi ∆= β + γ
3.2 Pematokan Lengkungan Horisontal
Pematokan pada lengkungan horizontal dibedakan atas bentuk lengkungan tersebut yaitu: 1. Lingkaran
2. Spiral
Pada pematokan lengkungan berbentuk lingkaran ada 5 cara, dari titik TC. a. Cara dengan selisih busur yang sama panjang
b. Cara dengan selisih absis yang sama panjang c. Cara dengan perpanjangan tali busur
d. Cara dengan koordinat polar (metode sudut defleksi) e. Cara dengan membuat politon.
Dan cara dari titik O dan titik PI
Sedangkan pada lengkungan berbentuk spiral ada 2 cara yaitu: a. Cara / metoda sudut defleksi
b. Cara absis dan ordinat 3.2.1 Pematokan Pada Busur Lingkaran
A. 3.2.1.1. Cara dengan selisih busur yang sama panjang dari titik TC. Dari data lengkungan diketahui unsur-unsur Rc, ∆c, dan Lc.
d
BC CB
PI
D
Misalkan panjang busur yang sama panjang = a meter = ; dimana n adalah banyaknya titik (harga a diambil antara 8 m s/d 12,5 m).
Gambar 23a.
Dari segitiga TC - 1 - 0 (lihat Gambar 22.a diatas). Panjang busur a membentuk sudut ,
maka : .
Koordinat titik 1, 2, 3, 4, n = CT pada salib sumbu garis tangen (TC - PI) dengan garis yang tegak lurus pada (TC-0) adalah sebagai berikut :
Untuk titik 1 = Untuk titik 2 = Untuk titik 3 = Untuk titik 4 =
Untuk titik ke n dilengkungan :
.
Cara ini banyak hitungannya tetapi letak titik-titik patok/patok pada lengkungan teratur. 3.2.1.2. Cara dengan selisih absis yang sama panjang dari titik Tc.
Gambar 23b.
Selisih absis = a Untuk titik 1 :
Untuk titik 2 :
Untuk titik n :
Cara ini banyak juga perhittingannya dan letak titik-titik -nya pada lengkungan tidak teratur.
3.2.1.3. Dengan cara perpanjangan tali busur dari TC (lihat gambar 23c dihalaman berikut) ! Panjang talibusur = a
Gambar 23 c Untuk titik 1 : X1 = a cos 2 Y1 = a sin 2
Dengan cara ini untuk titik 1 dapat diukur x1 dan y1 dengan sudut 900, juga dapat mengukur
sudut
2
jarak a. Demikian pula untiik titik 2, selain diukurkan ^arafc-jaralr x
2r ian y2 dengan
sudut 90° (perpanjangan tali busur) frisa juga iengan mengukurkan sudut dari jar&k a.
Hetapi dengan cara perpanjangan tali busur ini selain tidak effisien juga terjadi pertiunpukan kesalahan.
3.2.1.4. Dengan cara menggunakan koordinat polar atau metoda sudut defleksi. a). Dari Titik Tc
0 3 0 a 2 /2 a b a /2 Tc 1 3 Rc
Dengan cara polar ini yaitu mengukur sudut , , , ,… ; dimana , a = panjang talibusur atau jarak antara titik.
Atau harga bias didapat dari . Dengan jarak :
a = n b = 2 3 sin 2Rc c 2 sin 2R n n C
2 sin 2 1b R c T n c
Alat berdiri dititik TC dan a merupakan jarak yang konstan.
Metoda ini effisien untuk lingkaran yang berjari-jari besar, dimana harga a diambil antara 8-12, 5m.
3.2.1.5. dengan cara membuat suatu poligon.
Gambar 23e.
Dengan cara poligon, jarak-jaraknya antara titik adalah konstan = a.m. dan sudut-sudutnya (
2 90 ),
(180 -φ) atau
2 dan (180 + φ), tetapi karena cara mengukurnya disetiap titik pada
busur lengkungan, maka kesalahan akan bertumpuk.
Untuk memperkecil kesalahan, dilakukan sentering paksaan dan jarak a diambil sebesar mungkin.
Cara ini digunakan apabila tempatnya sempit, seperti terowongan.
2 90 180 180
B. Dari titik 0
Alat terdiri di 0 dengan sudut-sudut defleksi φdan jarak nya Rc (Gambar 23 f)
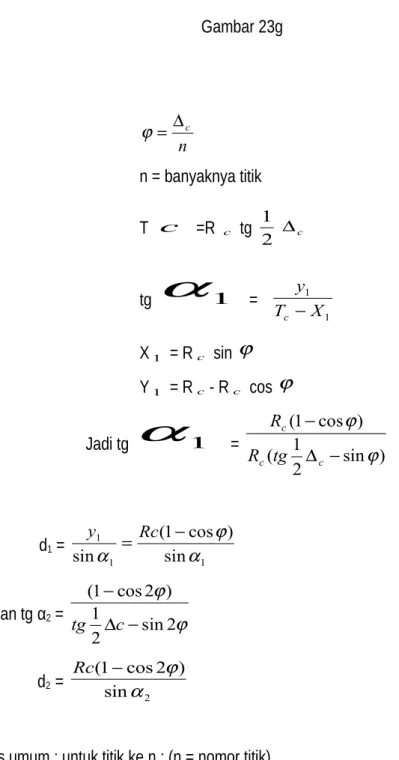
Gambar 23 f c. Dari titik PI
Gambar 23g n c n = banyaknya titik T c =R c tg 2 1 c tg
1 = 1 1 X T y c X1 = Rc sin Y1 = Rc - Rc cos Jadi tg
1 = ) sin 2 1 ( ) cos 1 ( c c c tg R R d1 = 1 1 1 sin ) cos 1 ( sin Rc y dan tg α2 = 2 sin 2 1 ) 2 cos 1 ( c tg d2 = 2 sin ) 2 cos 1 ( RcMaka rumus umum : untuk titik ke n : (n = nomor titik)
tg αn= n c tg n sin 2 1 ) cos 1 ( dn = n n Rc sin ) cos 1 (
Jadi dari titik P dihitung harga-harga αn dan dn.
3.2.2.Pematokan Pada Busur Spiral Pematokan ini ada 2 cara, yaitu :
1). dengan cara sudut defleksi 2). dengan cara absis dan ordinat
3.2.2.1. Dengan Cara Sudut Defleksi
Dengan cara sudut defleksi ini, diperlukan data ukuran sudut dan jarak dimana data tersebut harus dihitung dahulu dari data lengkungan yaitu Ls dan θs.
Gambar 24a. Data ukuran sudut dihitung sebagai berikut :
' .
01 = 1/3 ( L1/Lb)2 0s - Cs
0^ = Sudut lentur tltik 1, 2, 3, 4, 5, 6 = sudut defleksi. L1 = Jarak titik dengan titik 1
I = 1,2,3,4,5,6…………..
Bila i = Sc, maka 11= Ls dan 0 1= 1/3 0s – 0s’
dimana :
Cs= koreksi spiral = 0,0031
(Cs satuan detik sedangkan 0s derajat).
Alat didirikan diatas titik TS, kemudian diukurkan sudut-sudut 0 dan jarak-jarak l1
2.2.2. Dengan cara absis dan orclinat,
Pada cara absis dan ordinat diperlukan data ukuran-absis (X. ) pada tangen dan ordinat (Y^) pada garis yang tegaklurus tangen pada setiap titik ditangen. Data ukuran terbut untuk keperluan pematokan harus dihitung terleBih dahulu dari data lengkungan yang ada misalnya
Ls,Rc dan s
Gambar 24 b
Dari data lengkungan yaitu LS,RC dan S dapat dihitung data untuk pematokan
sbb :
a) li = jarak antara titik TS dengan titik – titik I pada busur spiral. i = titik – titik pada busur spiral
b) Xi = jarak titik TS ke titik i’ pada garis tangen i’ = titik – titik pada garis tangent
i i S C i i i l L R l l X cos
40 2 2 5 dimana : = sudut spirlal dalam derajat i = S S S i C L l 2 3 1 LS = Panjang spiral
CS = 0,0031
3
S
c) Yi = jarak titik I’ pada garis tangent ke titik I pada busur spiral.
i i S C i S i i R L l l l Y sin 6 3 3
Bila titik I = SC, maka li LS
C S S C S S S L L R L L X X cos
40 2 2 5 6 C S C S S S S L R L L Y X sin 6 3 2 6 dimana : C 3S CS 1Setelah data tersebut dihitung untuk setiap titik, maka jalannya pengukuran adalah sbb : Bila arah garis tangn yaitu dari TS ke PI sudah diketahui,
Maka :
Dirikan alat di TS, arahkan ke PI
Kemudian ukuran jarak-jarak Xi sehingga didapat titik-titik i!.
Dari titik-titik i! Dibuat garis-garis yang tegak lurus garis tangen atau dibuat
sudut-sudut sebesar 90 kemudian diukurkan jarak-jarak Yi, sehingga di dapat
titik-titik i pada busur spiral. 3.2.3. Problema Rintangan Pada Lengkungan
Problema Rintangan Pada Lengkungan, dapat terjadi pada busur lengkung lingkaran dan spiral.
Disini akan dibahas bila pada pematokan busur lingkaran dengan cara polar atau sudut defleksi ternyata ada gangguan/rintangan berupa bangunan atau lainnya. Sedangkan pada lengkungan spiral pada prinsipnya sama saja bila menggunakan metoda sudut defleksi.
3.2.3.1. Bila ada bangunan disekitar as/sumbu ;
Gambar 25a.
Dian buat sudut defleksi yang besarnya sama dengan sudut defleksi dari titik TC ketitik 3 ditambah 2 , yaitu 2 4
, maka akan didapat titik 4.
Bila titik 5 dan CT masih dapat terlihat dari titik 3, maka untuk mendapatkan titik 5 dan TC hanya dengan menambahkan sudut
2 dan . Dimana : C R a 2 2 sin
A = panjang tali busur (jarak antara titik). RC = Jari – jari lingkaran
Secara umum, bila pematokan hanya dapat dilakukan sampai dengan titik i, maka di titik i tersebut alat dibuat sudut sebesar (i + 2)
2
dengan jarak a, maka akan didapat titik (i + 1). Dan titik CT dapat ditentukan dari titik TC dengan membuat sudut 2C
1
dari arah tangen (TC – PI) dan jarak TC ke CT = 2RC sin C
2 1
.
Juga titik CT dapt ditentukan dari titik PI dengan membuat sudut (180 + C) dari arah TC
dan jarak PI ke CT sebesar TC = RC tan C 2 1
. 3.2.3.2. Bila bangunannya terletak dias/sumbu.
Bila ada rintangan pada as/sumbu, misalnya rintangan tersebut merupakan bangunan yang terletak pad as/sumbu lingkaran, maka pematokannya hanya titik – titik yang tidak melintasi bangunan tersebut.
Pertama-tama dipasang dahulu titik-titik TC, PI, dan CT. Kemudian dengan cara sudut defleksi dari titik TC dan CT dipatok titik-titik 1, 2, 5 dan 6. Sedangkan titik-titik 3 dan 4 tidak perlu dipasang.
Jarak antara titik = a meter ( 5 m – 12 m ). Sedangkan sudutnya sin
Rc a
2
2
Gambar.25b.
Untuk menggantikan titik 3 dan 4, maka dibuat titik P dan Q disisi bangunan, dari TC dan CT dengan jarak TC – P = p dan jarak CT – Q = q dimana sudut yang dibuat di TC dan CT adalah
dan β, dimana:
sin1/2 α = p/2.RC dan sin ½ β = c/2.RC
Jadi dapat dihitung sudut α dan β
3.2.3.3. Bila bangunannya terletak dititik TC atau CT :
Bila bangunan terletak di TC atau CT, maka pematokan nya dilakukan dari CT atau TC dengau cara sudut defleksi dan ditambah titik-titik lain di sekitar bangunan dan pada garis tangen untuk menentukan nomor-nomor stasion.
Pada gambar 24c, penentuan titik-titik 1, 2, 3, 4, dan 5 ditentukan dari titik CT dengan cara sudut defleksi.
Kemudian alat diletakan di titik 2, arahkan ke CT, buat sudut sebesar
( ) 2 1 180 C maka
akan didapat titik Q, ukur jarak 2.Q dan setelah titik Q didapat, tentukan titik R dengan jarak
QR = 2P = (RC - RC cos ) dan sudut 90, karena garis PR dibuat sejajar dengan garis 2.Q.
Untuk checking stationing, maka :
Sta R = Sta 2 - (2 sin)
C C Q R R dimana : = 57,296. 5 4 3 2 1 CT RC TC R ? C PI ? C a Gambar 25.d
Pada gambar 25d titik c tidak dapat dilokasikan, maka seperti pada gambar 25c, dibuat garis 4Q sejajar PR .Setelah titik titik 1, 2, 3, 4 dan 5 ditentukan (dipatok) dari titik TC dengan cara sudut defleksi, maka berdirikana alat di titik 4, arahkan ke titik TC kemudian puter teropong dengan membuat sudut sebesar { 1800 - ½ ( ∆ + alpaha)} sehingga didapat titik Q. ukur jarak
4Q. Setelah titik Q didapat ukurkan sudut 900 dan jarak QR =4P = (RC – RC COS alpha), maka
Untuk checking stationing, maka :
Sta R = sta 4 + ( 0 . RC) / PO + (4Q - R
C sin alpha)
Dimana PO = 570 ,296.
3.3 Pematokan Lengkungan Vertikal
Sebelum mematok pada lengkungan vertikal telebih dahulu dilakukan pematokan kelandaian.
Gambar 26.a
Misalkan patok 1, 2, 3 • • • •• dst. adalah patok di as sumbu yang berjarak setiap 50 m. Tinggi titik 1 telah diketahui (Sta 0 + 000) = t1. m.
Dititik 1 menurut peta perencanaan harus digali sedalam x meter. Jadi tinggi rencana titik 1 = T1 = t1 - x.
Rencana kelandaian adalah g %, dari rencana kelandaian ini dapat dihitung tinggi rencana titik 2 (Sta 0 + 050)f yaitu,
T2=T1+g/100x50 Demikian juga titik 3 (Sta 0 + 100) dan selanjutnya. Untuk titik 3 :
Untuk titik n :
Tn=T1+g/100xdn dn=Jarak dari titik 1 ketitik n.
Setelah mengetahui tinggi rencana dari titik-titik stasion, maka dilakukan pengukuran beda tinggi dengan cara tinggi garis bidik.
Rambu-rambu ukur diletakan pada titik-titik stasion 1, 2, 3, ... n.
Baca rambu yang dibidik tersebut misalkan bacaannya adalah a, b, c ... z. " Jadi tinggi garis bidik adalah tg b = t1 + a
Dapat dihitung tinggi titik-titik 2, 3, ...n adalah T2=tg b – b T3= tg b – c . . . . . Tn=tg n - z
Semudian dibandingkan dengan tinggi rencana titik-titik stasion 2, 3,…n n.
bila Tn > tn maka pada titik n ditulis : F= Tn-tn atau fill (ditimbun) = Tn - tn . m
bila Tn < tn maka pada titik n ditulis : G= Tn-tn atau cut ( digali)= tn-Tn.m dimana
Tn = Tinggi rencana titik n.
tn = Tinggi permukaan tanah asli titik n.
Gambar 26 b. * ' . - " Gambar. 26b adalah rencana kelandaian negatif.
Terlebih dahulu dihitung tinggi rencana titik-titik 4, 5> 6 (T ) kemudian dengan cara tinggi gar is bidik dihitung ting*-gi permukaan tanah titik-titik 4, 5, 6 (tn)„ sehingga dapat dihitung galian
atau timbunan pada titik-titik tersebut.
Dengan cara yang-sama, bila pada peta perencanaan ada sta -tion-station PLV, PVI dan PTV, maka pada station-station tersebut dipasang patok selain station-station tiap 25m-50ni. G-ambar 26c (dihalaman berikut) adalah gambar rencana leng -kungan vertikal cembung.
Gambar 26c TPVI = rencana titik PVI rencana
G1 dan g2 % = kelandaian rencana
LV =Panjang horisontal keluk rertikal atau jarak dari Sta PLV ke Sta PT7. Dari data-data tersebut diatas dapat dihitung tinggi renca na titik-titik 16, 17, 18, 19 dan 20 (0?n)
dengan cara sbb:
T16 = TPLV = TPVI –(g1/100). (LV/2)
T20 = TPTV = TPVI –(g2/100). (LV/2)
Sedangkan titik-titik 17, 18 dan 19 dihitung dengan rumus:
Tx = TPLV + (g1.x/100) + Y
dan :
bila dihitung dari titik PTV. dimana :
X = Jarak mendatar suatu titik dilengkungan dari titik PLV atau PTV. Y = dalam meter
A = g2 – g1 dalam persen (%)
Setelah didapat (dihitung) tinggi rencana titik-titik pada lengkungan, kemudian dilakukan pengukuran tinggi dengan cara tinggi garis bidik sehingga dapat dihitung tinggi titik-titik pada permukaan tanah dan dihitung dalamnya galian atau tingginya timbunan untuk setiap titik.
Gambrar 26d.
Demikian juga hitungan-hltungan untuk lengkungan vertikal, cekung (Gbr 26d), dalam menenttLkan/menghituing tinggi rencana titik-titik pada lengkungan yaltu : 23, 24, 25, 26 dan 27 (T ) dapat digtuiakan rumus-rumus seperti diatas (untult Gbr. 26c).
Supaya pekerjaan penggalian dan penimbunan berjalan lancax hendaknya pada waktu pematokan vertikal, patok terseBut di beri warna (cat) yang berlainan. Misalkan untuk patok yang harua digali menggunakan warna kuning dan untuk patok tim-bunan menggunakan warna merah atau memasang patok bambu di sebelah patok merah teraebut setinggi timbunannya
Pada pematokan sis/pinggir jalan (untuk membuat badan jalan) dapat dilakukan bersama – sama pematokan as jalan dengan melihat rencana diagram super-elevasi (Bab 2.2.3).
Dengan cara yang sama pada pematokan as jalan dapat juga mematok pinggir jalan tersebut. Pada waktu pekerjaan tanah berlangsung yaitu galian & timbunan, maka dilakukan pula pengukuran profil memanjang sepanjang as jalan dan sisi/pinggir jalan untuk memeriksa apakah sudah atau belum bentuk profil jalan tersebut, atau dengan perkataan lain, sesuai rencana atau tidak bentuk profil jalan tersebut.
DAFTAR I
STANDAR PERENCANAAN GEOMETRIK KLASIFIKASI JALAN JALAN RAYA
UTAMA
JALAN RAYA SEKUNDER
JALAN PENGHUBUNG
I IIA IIB IIC III
Klasifikasi Medan D B G D B G D B G D B G D B G LHR dalam SMP Kecepatan Rencana (KM/Jam) Lebar Daerah Penguasaan Min (m) Lebar Perkerasan (m) Lebar Median Min (m) Lebar Bahu (m)
Lereng Melintang Perkerasan
Lereng Melinmtang Bahu Jenis Lapisan Permukaan Jalan
Miring Tikungan Maks Jari-jari Lengkung Min (m) Landai Maks. >20.000 120 100 80 60 60 60 Min 2x(2x3,75) 10 3,00 3,00 3,00 2 % 4% Aspal Beton ( Hot-Mix) 10% 560 350 210 3% 5% 6% 6.000 - 20.000 100 80 60 40 40 40 2x3,50 atau 2x(2x3,50) 1,50 3,00 2,50 2,50 2 % 4% Aspal Beton 10% 350 210 115 4% 6% 7% 1.500-8.000 80 60 40 30 30 30 2x3,50 -3,00 2,50 2,50 2% 6% Penitrasi Berganda Atau setaraf 10% 210 115 50 5% 7% 8% <2.000 60 40 30 30 30 30 2x3,00 -2,50 1,50 1,00 3% 6% Paling Tinggi Penitrasi Tunggal 10% 115 50 30 6% 8% 10% -60 40 30 20 20 20 3,50 – 6,00 -1,50 2,50 -4% 6% Maks pelaburan Dengan aspal 10% 115 50 30 6% 8% 12% Catatan : * = Menurut keadan setempat
DAFTAR II Kecepatan rencana (km/jam) Jarak Pandangan henti (m) Jarak pandangan menyiap (m) Jari-jari lengkung minum dimana miring tikungan tak
perlu (m)
Batas jari-jari lengkung tikungan dimana harus menggunakan busur peralihan (m) Landai relatif anatara tepi perkerasan maksimum 120 225 790 3000 2000 1/280 100 165 670 2300 1500 1/240 80 115 520 1600 1100 1/200 60 75 380 1000 700 1/160
50 55 220 660 440 1/140
40 40 140 420 300 1/140
30 30 80 240 180 1/100
STANDAR PERENCANAAN ALINYEMEN
DAFTAR RUJUKAN
1). BINA MARGA : 1. Standard Perencanaan Geometrik Jalan Raya 2. Staking Out
3. Pedoman Cara Menghitung Tikungan Jalan Raya
2). Ir. Lien Tumewu : Route Survey, Diktat Jurusan Geodesi, FTSP-ITB,Bandung,1977.
3.) Prof.Ir.Soetomo Wongsotjitro : Ilmu Ukur Tanah 4.) Thomas F. Hickerson : Route Surveys and Design
DAFTAR LAMPIRAN Daftar I : STANDAR PERENCANAAN GEOMETRIK Daftar II : STANDAR PERENCANAAN ALINYEMEN
Daftar III : PANJANG MINIMUM SPIRAL DAN KEMIRINGAN MELINTANG
Grafik I : PELEBARAN PERKERASAN PADA TIKUNGAN Grafik II : KEBEBASAN SAMPING PADA TIKUNGAN Grafik III : PANJANG LENGKUNG VERTIKAL CEMBUNG Grafik IV : PANJANG LENGKUNG VERTIKAL CEMBUNG
( UNTUK JALAN RAYA DUA JALUR )
Grafik V : PANJANG LENGKUNG VERTIKAL CEKUNG Grafik VI : PANJANG LENGKUNG VERTIKAL CEKUNG PADA