commit to user
PERENCANAAN JALAN DAN RENCANA
ANGGARAN BIAYA RUAS JALAN
JEPANAN-PANDEYAN KECAMATAN NGEMPLAK
BOYOLALI
Oleh :
Arie Reymond Dau
I.8204030
PROGRAM DIPLOMA III TEKNIK SIPIL TRANSPORTASI
FAKULTAS TEKNIK
commit to user
1
BAB I
PENDAHULUAN
1.1
Latar Belakang Masalah.
Perkembangan jalan raya merupakan salah satu hal yang selalu beriringan dengan kemajuan teknologi dan pemikiran manusia yang menggunakannya, karenanya jalan merupakan fasilitas penting bagi manusia supaya dapat mencapai suatu daerah yang ingin dicapai.
Jalan raya adalah suatu lintasan yang bertujuan melewatkan lalu lintas dari suatu tempat ke tempat yang lain. Arti Lintasan disini dapat diartikan sebagai tanah yang diperkeras atau jalan tanah tanpa perkerasan, sedangkan lalu lintas adalah semua benda dan makhluk hidup yang melewati jalan tersebut baik kendaraan bermotor, tidak bermotor, manusia, ataupun hewan.
Pembuatan jalan yang menghubungkan Jepanan dan Pandeyan yang terletak di Kabupaten Boyolali bertujuan untuk memperlancar arus transportasi, menghubungkan serta membuka keterisoliran antara 2 daerah yaitu Jepanan dan Pandeyan serta daerah – daerah disekitar Jepanan ataupun Pandeyan, demi kemajuan suatu daerah serta pemerataan ekonomi.
1.2
Rumusan Masalah
Perencanaan jalan pada tugas akhir ini, menghubungkan Jepanan dan Pandeyan. Jenis kelas jalan yang akan direncanakan adalah jalan kelas II ( Jalan Arteri ), dengan tiga tikungan yang berbeda.
commit to user
1.3
Tujuan
Dalam perencanaan pembuatan jalan ini ada tujuan yang hendak dicapai yaitu : a. Merencanakan bentuk geometrik dari jalan kelas fungsi arteri.
b. Merencanakan tebal perkerasan pada jalan tersebut.
c. Merencanakan anggaran biaya dan Time Schedule yang dibutuhkan untuk pembuatan jalan tersebut.
1.4
Masalah
Dalam penulisan ini perencanaan yang menyangkut hal pembuatan jalan akan disajikan sedemikian rupa sehingga memperoleh jalan sesuai dengan fungsi dan kelas jalan. Hal yang akan disajikan dalam penulisan ini adalah :
1.4.1. Perencanaan Geometrik Jalan
Dalam perencanaan geometrik jalan raya pada penulisan ini mengacu pada Peraturan Perencanaan Geometrik Jalan Antar Kota Tahun 1997 dan Peraturan Perencanaan Geometrik Jalan Raya Tahun 1970 yang dikeluarkan oleh Dinas Pekerjaan Umum Direktorat Jenderal Bina Marga. Perencanaan geometrik ini akan membahas beberapa hal antara lain :
a) Alinemen Horisontal
Alinemen ( garis tujuan ) horisontal merupakan trace jalan yang terdiri dari :
• Garis lurus ( tangent ), merupakan jalan bagian lurus.
• Lengkungan horisontal yang disebut tikungan yaitu :
¾ Circle – Circle
¾ Spiral – Circle – Spiral
¾ Spiral – Spiral
• Pelebaran perkerasan pada tikungan.
commit to user
b) Alinemen VertikalAlinemen Vertikal adalah bidang tegak yang melalui sumbu jalan atau proyeksi tegak lurus bidang gambar. Profil ini menggambarkan tinggi rendahnya jalan terhadap muka tanah asli.
c) Stationing
d) Overlapping
1.4.2. Perencanaan Tebal Perkerasan Lentur
Penulisan ini membahas tentang perencanaan jalan baru yang menghubungkan dua daerah. Untuk menentukan tebal perkerasan yang direncanakan sesuai dengan Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisis Komponen Dinas Pekerjaan Umum Bina Marga. Satuan perkerasan yang dipakai adalah sebagai berikut :
a) Lapis permukaan ( surface course ) : Laston MS 744 b) Lapis pondasi atas ( base course ) : Batu pecah CBR 100 % c) Lapis pondasi bawah ( sub base course ) : Sirtu CBR 70 %
1.4.3. Rencana Anggaran Biaya
Menghitung rencana anggaran biaya yang meliputi : a) Volume Pekerjaan
b) Harga satuan Pekerjaan, bahan dan peralatan
c) Alokasi waktu penyelesaian masing-masing pekerjaan.
commit to user
4
BAB II
DASAR TEORI
2.1. Tinjauan Pustaka
Perencanaan geometrik jalan adalah perencanaan route dari suatu ruas jalan secara lengkap, meliputi beberapa elemen yang disesuaikan dengan kelengkapan data dan data dasar yang ada atau tersedia dari hasil survei lapangan dan telah dianalisis, serta mengacu pada ketentuan yang berlaku (Shirley L. Hendarsin, 2000)
Jalan raya adalah suatu lintasan yang bertujuan melewatkan lalu lintas dari suatu tempat ke tempat lain. Lintasan tersebut menyangkut jalur tanah yang diperkuat (diperkeras) dan jalur tanah tanpa perkerasan. Sedangkan maksud lalu lintas diatas menyangkut semua benda atau makhluk hidup yang melewati jalan tersebut baik kendaraan bermotor, gerobak, hewan ataupun manusia (Edy Setyawan, 2003)
Perencanaan geometrik secara umum menyangkut aspek-aspek perencanaan bagian-bagian jalan tersebut baik untuk jalan sendiri maupun untuk pertemuan yang bersangkutan agar tercipta keserasian sehingga dapat memperlancar lalu lintas (Edy Setyawan).
Perkerasan jalan adalah konstruksi yang dibangun diatas lapisan tanah dasar (subgrade) yang berfungsi untuk menopang beban lalu lintas (Shirley L. Hendarsin, 2000)
commit to user
2.2. Klasifikasi Jalan
Klasifikasi jalan di Indonesia menurut Bina Marga dalam Tata Cara Perencanaan Geometrik Jalan Antar Kota ( TPGJAK ) No 038 / T / BM / 1997, disusun pada tabel 2.1 :
Tabel 2.1 Ketentuan Klasifikasi : Fungsi, Kelas Beban, Medan
FUNGSI JALAN ARTERI KOLEKTOR LOKAL
KELAS JALAN I II IIIA IIIA IIIB IIIC
Muatan Sumbu Terberat, (ton)
> 10 10 8 8 8 Tidak ditentukan TIPE MEDAN D B G D B G D B G
Kemiringan Medan, (%)
<3 3-25 >25 <3 3-25 >25 <3 3-25 >25
Klasifikasi menurut wewenang pembinaan jalan (administrative) sesuai PP.No. 26 /1985 : Jalan Nasional, Jalan Propinsi, Jalan Kabupaten / Kotamadya,
Jalan Desa dan Jalan Khusus
Keterangan : Datar (D), Perbukitan (B) dan Pegunungan (G)
Sumber TPGJAK 1997
2.3.
Perencanaan Alinemen Horisontal
Pada perencanaan alinemen horisontal, umumnya akan ditemui dua bagian jalan, yaitu : bagian lurus dan bagian lengkung atau umum disebut tikungan yang terdiri dari 3 jenis tikungan yang digunakan, yaitu :
• Lingkaran ( Full Circle = F-C )
• Spiral-Lingkaran-Spiral ( Spiral- Circle- Spiral = S-C-S )
• Spiral-Spiral ( S-S )
2.3.1. Bagian Lurus
commit to user
2.3.2. Tikungan
2.3.2.1. Jari-Jari Minimum
Agar kendaraan stabil saat melalui tikungan, perlu dibuat suatu kemiringan melintang jalan pada tikungan yang disebut superelevasi (e). Pada saat kendaraan melalui daerah superelevasi, akan terjadi gesekan arah melintang jalan antara ban kendaraan dengan permukaan aspal yang menimbulkan gaya gesekan melintang. Perbandingan gaya gesekan melintang dengan gaya normal disebut koefisien gesekan melintang (f).
Untuk menghindari terjadinya kecelakaan, maka untuk kecepatan tertentu dapat dihitung jari-jari minimum untuk superelevasi maksimum dan koefisien gesekan maksimum.
fmaks = 0,192 – (0,00065 x Vr) ... (1)
Rmin =
) (
127
2
f e
V
maks R
+ ... (2)
Dmaks = 2
) (
53 , 181913
r
maks maks
V
f
e +
×
... (3)
Keterangan :
Rmin = Jari-jari tikungan minimum, (m)
VR = Kecepatan kendaraan rencana, (km/jam)
emaks = Superelevasi maksimum, (%)
f = Koefisien gesek, untukl perkerasan aspal f = 0,14 – 0,24 Dmaks = Derajat maksimum
Untuk perhitungan, digunakan emaks = 10 % sesuai tabel
Tabel 2.2 Panjang jari-jari minimum (dibulatkan) untuk emaks = 10%
VR(km/jam) 120 100 90 80 60 50 40 30 20 Rmin(m) 600 370 280 210 115 80 50 30 15
Sumber TPGJAK 1997
Untuk kecepatan rencana < 80 km/jam berlaku fmaks = - 0,00065 VR + 0,192
commit to user
2.3.2.2. Lengkung Peralihan (Ls)Dengan adanya lengkung peralihan, maka tikungan menggunakan jenis S-C-S. panjang lengkung peralihan (Ls), menurut Tata Cara Perencanaan Geometrik Jalan Antar Kota, 1997, diambil nilai yang terbesar dari tiga persamaan di bawah ini :
1. Berdasar waktu tempuh maksimum (3 detik), untuk melintasi lengkung peralihan, maka panjang lengkung :
Ls = 6 , 3 VR
T ... (4)
2. Berdasarkan antisipasi gaya sentrifugal, digunakan rumus Modifikasi Shortt:
Ls = 0,022
C R VR
.
3
- 2,727
C ed VR.
... (5)
3. Berdasarkan tingkat pencapaian perubahan kelandaian
Ls =
e R n m
r V e e
. 6 , 3
. ) ( −
... (6)
Keterangan :
T : waktu tempuh = 3 detik VR : Kecepatan rencana (km/jam)
e : Superelevasi
R : Jari-jari busur lingkaran (m)
C : Perubahan percepatan 0,3-1,0 disarankan 0,4 m/det2 em : Superelevasi maximum
en : Superelevasi normal
re : Tingkat pencapaian perubahan kelandaian melintang jalan (m/m/detik),
sebagai berikut:
Untuk VR≤ 70 km/jam, remak = 0,035 m/m/det
commit to user
Gambar 2.1. Bagan Alir Perencanaan Alinemen Horizontal
Perhitungan Data Tikungan
Perhitungan Pelebaran Perkerasan
Perhitungan Daerah Kebebasan Samping
Perhitungan Data Tikungan
Perhitungan Pelebaran Perkerasan
Perhitungan Daerah Kebebasan Samping TIDAK
TIDAK
YA TIDAK
Dicoba tikungan S-S
YA
YA Mulai
Data :
Jari-jari rencana (Rr)
Sudut Luar tikungan (∆)
Kecepatan rencana (Vr)
Dicoba tikungan FC
Rr ≥ Rmin FC
Dicoba tikungan S-C-S
Lc > 20m
Perhitungan Data Tikungan
Perhitungan Pelebaran Perkerasan
Perhitungan Daerah Kebebasan Samping
commit to user
Gambar 2.2. Lengkung Full Circle
2.3.3. Jenis Tikungan
2.3.3.1. Bentuk busur lingkaran (F-C)
Keterangan :
∆ = Sudut Tikungan O = Titik Pusat Tikungan TC = Tangen toCircle
CT = Circle to Tangen Rc = Jari-jari Lingkungan
Tt = Panjang tangen (jarak dari TC ke PI atau PI ke TC) Lc = Panjang Busur Lingkaran
Ec = Jarak Luar dari PI ke busur lingkaran
FC (Full Circle) adalah jenis tikungan yang hanya terdiri dari bagian suatu lingkaran saja. Tikungan FC hanya digunakan untuk R (jari-jari) yang besar agar tidak terjadi patahan, karena dengan R kecil maka diperlukan superelevasi yang besar.
Tt
TC CT
∆
∆
Rc Rc
Et
commit to user
Tabel 2.3 Jari-jari tikungan yang tidak memerlukan lengkung peralihan
VR(km/jam) 120 100 80 60 50 40 30 20
Rmin 2500 1500 900 500 350 250 130 60
Sumber TPGJAK 1997
Tc = Rc tan ½ ∆ ... (7) Ec = Tc tan ¼ ∆ ... (8)
Lc = Rco
360 2π
∆
commit to user
Ya
Gambar 2.3. Bagan Alir Perencanaan Tikungan Full Circle Tidak
Data :
Jari-jari rencana (Rc) Sudut luar tikungan (∆) Kecepatan rencana (Vr)
Perhitungan :
Jari-jari minimum (Rmin) untuk FC Derajat lengkung (D), Superelevasi (e)
Tikungan S-C-S
Perhitungan Data Tikungan : Lengkung peralihan fiktif (Ls′) Panjang tangen (Tc)
Jarak luar dari PI ke busur lingkaran (Ec)
Panjang busur lingkaran (Lc) Rc ≥ Rmin FC
Perhitungan lain : Pelebaran perkerasan Daerah Kebebasan samping
Checking : 2 Tc > Lc….ok
commit to user
2.3.3.2. Tikungan Spiral-Circle-Spiral (S-C-S)
Gambar 2.4 Lengkung Spiral-Circle-Spiral
Keterangan gambar :
Xs = Absis titik SC pada garis tangen, jarak dari titik ST ke SC
Ys = Jarak tegak lurus ketitik SC pada lengkung
Ls = Panjang dari titik TS ke SC atau CS ke ST
Lc = Panjang busur lingkaran (panjang dari titik SC ke CS)
Tt = Panjang tangen dari titik PI ke titik TS atau ke titik ST
TS = Titik dari tangen ke spiral
SC = Titik dari spiral ke lingkaran
Es = Jarak dari PI ke busur lingkaran
θs = Sudut lengkung spiral
Rr = Jari-jari lingkaran
P = Pergeseran tangen terhadap spiral
commit to user
Rumus-rumus yang digunakan :
1. Xs = Ls ⎟⎟
⎠ ⎞ ⎜⎜
⎝ ⎛
×
− 2 2
40 1
Rd Ls
... (10)
2. Ys = ⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛
xRd Ls
6
2
... (11)
3. θs =
Rd Ls x
π 90
... (12)
4. Lc = x s⎟xπ xRd
⎠ ⎞ ⎜
⎝
⎛∆ Θ
180 2
1 ... (13)
5. p = (1 cos ) 6
2
s Rd
Rd x
Ls − − Θ
... (14)
6. k = Rdx s Rd
x Ls
Ls ⎟⎟− Θ
⎠ ⎞ ⎜⎜
⎝ ⎛
− sin
40 ... (15)
7. Ts = Rd+P x ∆1+K
2 1 tan )
( ... (17)
8. Es = (Rd+P)xsec12∆1− Rd ... (18) 9. Ltot = Lc + 2Ls ... (19)
Jika p yang dihitung dengan rumus di bawah, maka ketentuan tikungan yang digunakan bentuk S-C-S.
P =
Rc Ls
24
2
< 0,25 m... (20)
commit to user
Gambar 2.5. Bagan Alir Perencanaan Tikungan Spiral-Circle-Spiral
Mulai
Data :
Jari-jari rencana (Rc)
Sudut luar tikungan (∆)
Kecepatan rencana (Vr)
Syarat :
Rc < Rmin, Lc > 20m, θc > 0
Perhitungan :
Jari-jari minimum (Rmin)
Derajat Lengkung (D)
Superelevasi (e)
Panjang Lengkung peralihan (Ls)
Panjang Busur Lingkaran (Lc)
Sudut lengkung spiral (θs)
Sudut busur lingkaran (θc)
Perhitungan lain : Pelebaran Perkerasan
Daerah Kebebasan Samping
Perhitungan Data Tikungan :
Absis titik SC (Xs) dan Ordinat titik SC (Ys)
Pergeseran Tangen terhadap spiral (p)
Absis dari p pada garis tangen spiral (k)
Panjang tangen total (Ts)
Jarak luar dari PI ke busur lingkaran (Es)
commit to user
2.3.3.3. Tikungan Spiral-Spiral (S-S)Tikungan yang disertai lengkung peralihan.
Gambar 2.6 Lengkung Spiral-Spiral
Keterangan gambar :
Tt = Panjang tangen dari titik PI ke titik TS atau ke titik ST Xs = Absis titik SS pada garis tangen, jarak dari titik TS ke SS Ls = Panjang dari titik TS ke SS atau SS ke ST
Ts = Panjang tangen dari titik PI ke titik TS atau ke titik ST TS = Titik dari tangen ke spiral
Et = Jarak dari PI ke busur lingkaran
θs = Sudut lengkung spiral Rr = Jari-jari lingkaran
p = Pergeseran tangen terhadap spiral k = Absis dari P pada garis tangen spiral Rumus-rumus yang digunakan :
1. θs = 3 2
1 ∆ ... (21)
commit to user
3. Xs =d
R Ls Ls
. 40
3
− ... (23)
4. Ys = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ d R Ls . 6 2 ... (24)
5. P = Υs−Rd
(
1−cosΘs)
... (25)6. K = Χs − Rd xsinΘs ... (26)
7. Tt = (Rd+P)xtan12∆1+K ... (27)
8. Et = Rd+P x ∆1− Rd 2 1 sec ) ( ... (28)
commit to user
Tidak
Ya
Gambar 2.7. Bagan Alir Perencanaan Tikungan Spiral-Spiral
Lc < 20 m
θs = ∆/2
Perhitungan :
Jari-jari minimum (Rmin)
Derajat Lengkung (D)
Superelevasi (e)
Panjang Lengkung peralihan (Ls)
Sudut Lengkung spiral (θs)
Tikungan S-C-S
Data :
Jari-jari Rencana (Rc)
Sudut Luar Tikungan (∆)
Kecepatan Rencana (Vr) Mulai
Perhitungan Data Tikungan :
Absis titik SC (Xs) dan Ordinat titik SC (Ys)
Pergeseran Tangen terhadap spiral (p)
Absis dari p pada garis tangen spiral (k)
Panjang tangen total (Ts)
Jarak luar dari PI ke busur lingkaran (Es)
Perhitungan lain : Pelebaran Perkerasan
Daerah Kebebasan Samping
commit to user
Kemiringan normal pada bagian jalan lurus As Jalan
Kanan = ka -Kiri = ki -
e = - 2% h = beda tinggi
e = - 2%
Kemiringan melintang pada tikungan belok kanan As Jalan
Kanan = ka - Kiri = ki +
emin h = beda tinggi
emaks
Kemiringan melintang pada tikungan belok kiri As Jalan Kanan = ka +
Kiri = ki -
emaks
h = beda tinggi
emin
2.3.4. Diagram Super Elevasi
Super elevasi adalah kemiringan melintang jalan pada daerah tikungan. Untuk bagian jalan lurus, jalan mempunyai kemiringan melintang yang biasa disebut lereng normal atau normal trawn yaitu diambil minimum 2 % baik sebelah kiri maupun sebelah kanan AS jalan. Hal ini dipergunakan untuk sistem drainase aktif.
Harga elevasi (e) yang menyebabkan kenaikan elevasi terhadap sumbu jalan di beri tanda (+) dan yang menyebabkan penurunan elevasi terhadap jalan di beri tanda (-).
commit to user
a) Diagam super elevasi Full - Circle menurut Bina Marga
sisi luar tikungan emax
sisi dalam tikungan
commit to user
Gambar 2.8. Diagram Super Elevasi Full Circle
Untuk mencari kemiringan pada Tc :
Tc = Ls
Ls
4 / 3
=
) 2 max (
) 2 (
+ +
e x
... (30)
Ls pada tikungan circle ini sebagai Ls bayangan yaitu untuk perubahan kemiringan secara berangsur-angsur dari kemiringan normal ke maksimum atau minimum.
(
en ed)
m W
Ls= × × +
2 ... (31)
Keterangan :
Ls = lengkung peralihan. W = Lebar perkerasan m = Jarak pandang
n
e = Kemiringan normal
d
e = Kemiringan maksimum
Kemiringan lengkung di role, pada daerah tangen tidak mengalami kemiringan
• jarak
CT TC
kemiringan min
maks
= 3/4 Ls
• jarak
CT TC
kemiringan awal perubahan = 1/4 Ls
b) Diagram super elevasi pada Spiral – Cricle – Spiral menurut Bina Marga.
-2% en
en -2% 1
TS
1
ST
0 %
2 3 4
S
emax
Lc Ls
e = 0 %
4
C
3 2
Ls
Sisi dalam Bagian lengkung Bagian
lurus
Bagian lurus
Sisi luar tikungan Bagian
lengkung
commit to user
Gambar 2.9 Diagram Super Elevasi Spiral-Cirle-Spiral.
c) Diagram super elevasi pada Spiral – Spiral.
IV
en-2% 0 %
e min
q
en-2%
en-2% q
q
-2% +2%
1)
q
e maks
4) 3)
2)
en - 2%
LS TS
0% 0%
en = - 2% ST
emak
LS
I II III III I II
IV
e = 0 %
Sisi dalam tikungan Sisi luar tikungan
Bagian lurus Bagian lengkung
commit to user
garis pandangE
Lajur Dalam Lajur
Luar
Jh
Penghalang Pandangan
R R' R
Lt
Gambar 2.10. Diagram Super Elevasi Spiral-Spiral
2.3.5. Daerah Bebas Samping Di Tikungan
Jarak Pandang pengemudi pada lengkung horisontal (di tikungan), adalah pandanngan bebas pengemudi dari halangan benda-benda di sisi jalan. Daerah bebas samping di tikungan dihitung bedasarkan rumus-rumus sebagai berikut :
2.3.5.1. Jarak pandangan lebih kecil daripada panjang tikungan (Jh < Lt).
Gambar 2.11. Jarak pandangan pada lengkung horizontal untuk Jh < Lt Keterangan :
q
en-2% en-2%
q
en-2% 0 %
q
-2% +2%
1)
e min
q
e maks
4) 3)
commit to user
PENGHALANG PANDANGANR R'
R Lt
LAJUR DALAM LAJUR LUAR Jh
Lt
GARIS PANDANG E
Jh = Jarak pandang henti (m) Lt = Panjang tikungan (m)
E = Daerah kebebasan samping (m) R = Jari-jari lingkaran (m)
Maka: E = R ( 1 – cos
R Jh
o
. 90
π ) . ... (32)
2.3.5.2. Jarak pandangan lebih besar dari panjang tikungan (Jh > Lt)
Gambar 2.12. Jarak pandangan pada lengkung horizontal untuk Jh > Lt
Keterangan:
Jh = Jarak pandang henti Jd = Jarak pandang menyiap Lt = Panjang lengkung total R = Jari-jari tikungan R’ = Jari-jari sumbu lajur
Maka : E = R (1- cos R
Jh 90o
) + (
(
)
⎟⎟⎠ ⎞ ⎜⎜
⎝ ⎛ −
R Jh Sin
Lt Jh
. . 90 .
2 1
π ... (33)
2.3.6. Pelebaran Perkerasan
commit to user
Gambar dari pelebaran perkerasan pada tikungan dapat dilihat pada gambar berikut ini.
Gambar 2.13 Pelebaran Perkerasan Pada Tikungan
2.3.6.1. Truk / Bus Rumus yang digunakan
B = n (b’ + c) + (n + 1) Td + Z ... (34) b’ = b + b” ... (35) b” = Rr - Rr2 −p2 ... (36)
Td = Rr2+A
(
2p+A)
−R ... (37)Z = ⎟
⎠ ⎞ ⎜ ⎝ ⎛ ×
R V
105 ,
0 ... (38)
ε = B - W ... (39)
Keterangan:
B = Lebar perkerasan pada tikungan n = Jumlah jalur lalu lintas
b = Lebar lendutan truk pada jalur lurus b’ = Lebar lintasan truk pada tikungan
commit to user
A = Tonjolan depan sampai bumperW = Lebar perkerasan
Td = Lebar melintang akibat tonjolan depan Z = Lebar tambahan akibat kelelahan pengamudi c = Kebebasan samping
ε = Pelebaran perkerasan
2.3.7. Kontrol Overlapping
Pada setiap tikungan yang sudah direncanakan, maka jangan sampai terjadi over lapping. Karena kalau hal ini terjadi maka tikungan tersebut menjadi tidak aman untuk digunakan sesuai kecepatan rencana. Syarat supaya tidak terjadi over lapping : aI > 3V
Dimana : aI = daerah tangen (meter)
V = kecepatan rencana
Contoh :
Gambar 2.14. Kontrol over lapping
Vr = 80 km/jam = 22,22 m/det.
Syarat over lapping a’ ≥ a, dimana a = 3 x V detik
= 3 x 22,22 = 66,67 m bila aI d1 – Tc ≥ 66,67 m aman
d1
d2
d3
d4
ST CS
SC TS
ST TS
TC
CT
PI-1 PI-2
commit to user
aII d2 – Tc – Tt1 ≥ 66,67 m aman
aIII d3 – Tt1 – Tt2≥ 66,67 m aman
aIV d4 – Tt2≥ 66,67 m aman
Contoh perhitungan stationing : STA A = Sta 0+000m STA PI1 = Sta A + d 1
STA TS1 = Sta PI1 – Ts1
STA SC1 = Sta Ts1 + Ls1
STA CS1 = Sta Sc1 + Lc1
STA ST1 = Sta Cs + Lc1
STA PI2 = Sta St1 + d 2 – Ts1
STA TS2 = Sta PI2 – Ts2
STA SC2 = Sta Ts2 + Ls2
STA CS2 = Sta Sc2 + Lc2
STAST2 = Sta Cs2 + Ls2
STA PI3 = Sta St2 + d 3 – Ts2
STA TC3 = Sta PI3 – Tc3
STACT3 = Sta Tc3 + Lc3
STA B = Sta Ct3 + d4 – Tc3
2.4.
Alinemen Vertikal
Alinemen Vertikal adalah perencanaan elevasi sumbu jalan pada setiap titik yang ditinjau, berupa profil memanjang. Pada peencanaan alinemen vertikal terdapat kelandaian positif (tanjakan) dan kelandaian negatif (turunan), sehingga kombinasinya berupa lengkung cembung dan lengkung cekung. Disamping kedua lengkung tersebut terdapat pula kelandaian = 0 (datar).
Macam-macam lengkung vertikal dan rumusnya : 1) Lengkung Vertikal Cembung.
Ketentuan tinggi menurut Bina Marga (1997) untuk lengkung cembung dapat dilihat pada tabel 2.5 :
Tabel 2.4 Ketentuan tinggi untuk jarak pandang
commit to user
Henti (Jh) 1,05 0,15
Mendahului (Jd) 1,05 1,05
Sumber TPGJAK 1997
Panjang L, berdasarkan jarak pandang henti (Jh )
Jh < L, maka : L =
405 J . A h2
... (40)
Jh > L, maka : L = 2 Jh -
A 405
... (41)
Panjang L berdasar jarak pandang mendahului ( Jd)
Jd < L, maka : L =
840 J . A d2
... (42)
Jd > L, maka : L = 2 Jd -
A 840
... (43)
Keterangan :
L = Panjang lengkung vertical (m) A = Perbedaan grade (m)
Jh = Jarak pandangan henti (m)
Jd = Jarak pandangan mendahului atau menyiap (m)
Gambar. 2.15. Lengkung Vertikal Cembung Keterangan :
PLV = titik awal lengkung parabola.
PV1 = titik perpotongan kelandaian g1 dan g2
g = kemiringan tangen ; (+) naik; (-) turun. A = perbedaan aljabar landai (g1 - g2) %.
EV = pergeseran vertikal titik tengah besar lingkaran (PV1 - m) meter.
PLV d1 d2
g2
EV m g1
h2
h1
Jh PL
commit to user
Jh = jarak pandangan.h1 = tinggi mata pengaruh.
h2 = tinggi halangan.
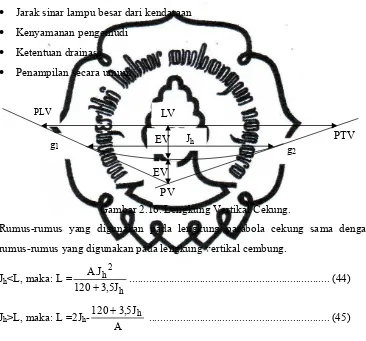
2) Lengkung Vertikal Cekung.
Ada empat kriteria sebagai pertimbangan yang dapat digunakan untuk menentukan panjang lengkung cekung vertikal (L), yaitu :
• Jarak sinar lampu besar dari kendaraan
• Kenyamanan pengemudi
• Ketentuan drainase
[image:30.612.134.500.212.553.2]• Penampilan secara umum
Gambar 2.16. Lengkung Vertikal Cekung.
Rumus-rumus yang digunakan pada lengkung parabola cekung sama dengan rumus-rumus yang digunakan pada lengkung vertikal cembung.
Jh<L, maka: L =
h 2 h
J 5 , 3 120
J . A
+ ... (44)
Jh>L, maka: L =2Jh
-A J 5 , 3 120+ h
... (45)
Hal-hal yang perlu diperhatikan dalam perencanaan Alinemen Vertikal 1) Kelandaian maksimum.
Kelandaian maksimum didasarkan pada kecepatan truk yang bermuatan penuh mampu bergerak dengan kecepatan tidak kurang dari separuh kecepatan semula tanpa harus menggunakan gigi rendah.
Tabel 2.5 Kelandaian Maksimum yang diijinkan
Landai maksimum % 3 3 4 5 8 9 10 10
PLV
EV
g2
EV g1
PV
Jh PTV
commit to user
VR (km/jam) 120 110 100 80 60 50 40 <40
Sumber : TPGJAK 1997
2) Kelandaian Minimum
Pada jalan yang menggunakan kerb pada tepi perkerasannya, perlu dibuat kelandaian minimum 0,5 % untuk keperluan kemiringan saluran samping, karena kemiringan jalan dengan kerb hanya cukup untuk mengalirkan air kesamping.
2.5.
Perencanaan Tebal Perkerasan Lentur
Perencanaan konstruksi lapisan perkerasan lentur disini untuk jalan baru dengan Metoda Analisa Komponen, yaitu dengan metoda analisa komponen SKBI – 2.3.26. 1987. adapun untuk perhitungannya perlu pemahaman istilah-istilah sebagai berikut :
A. Lalu lintas
1. Lalu lintas harian rata-rata (LHR)
Lalu lintas harian rata-rata (LHR) setiap jenis kendaraan ditentukan pada awal umur rencana, yang dihitung untuk dua arah pada jalan tanpa median atau masing-masing arah pada jalan dengan median.
− Lalu lintas harian rata-rata permulaan (LHRP)
(
)
11
1 n
S
P LHR i
LHR = × + ... (46)
− Lalu lintas harian rata-rata akhir (LHRA)
(
)
22
1 n
P
A LHR i
LHR = × + ... (47)
2. Rumus-rumus Lintas ekuivalen
− Lintas Ekuivalen Permulaan (LEP)
E C LHR LEP
n
mp j
Pj× ×
=
∑
=
... (48)
− Lintas Ekuivalen Akhir (LEA)
E C LHR LEA
n
mp j
Aj× ×
=
∑
=
commit to user
− Lintas Ekuivalen Tengah (LET)
2
LEA LEP
LET = + ... (50)
− Lintas Ekuivalen Rencana (LER)
Fp LET
LER= × ... (51)
10
2
n
Fp= ... (52)
Dimana:
i1 = Pertumbuhan lalu lintas masa konstruksi
i2 = Pertumbuhan lulu lintas masa layanan
J = Jenis kendaraan n1 = Masa konstruksi n2 = Umur rencana
C = Koefisien distribusi kendaraan
E = Angka ekuivalen beban sumbu kendaraan Fp = Faktor Penyesuaian
B. Angka ekuivalen (E) Beban Sumbu Kendaraan
Angka ekuivalen (E) masing-masing golongan beban umum (setiap kendaraan) ditentukan menurut rumus daftar sebagai berikut:
−
4
8160 086
, 0
. ⎟
⎠ ⎞ ⎜
⎝ ⎛
= bebansatu sumbutunggaldlmkg
Tunggal Sumbu
E ... (53)
−
4
8160 086
, 0
. ⎟
⎠ ⎞ ⎜
⎝ ⎛
= bebansatusumbu gandadlmkg
Ganda Sumbu
E ... (54)
C. Daya Dukung Tanah Dasar (DDT dan CBR)
Daya dukung tanah dasar (DDT) ditetapkan berdasarkan grafik korelasi DDT dan CBR.
commit to user
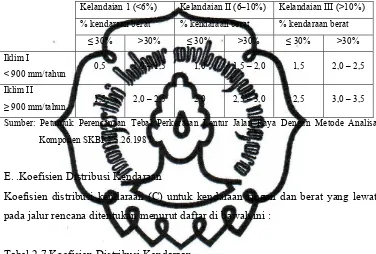
Faktor regional bisa juga juga disebut faktor koreksi sehubungan dengan perbedaan kondisi tertentu. Kondisi-kondisi yang dimaksud antara lain keadaan lapangan dan iklim yang dapat mempengaruhi keadaan pembebanan daya dukung tanah dan perkerasan. Dengan demikian dalam penentuan tebal perkerasan ini Faktor Regional hanya dipengaruhi bentuk alinemen ( kelandaian dan tikungan)
Tabel 2.6 Prosentase kendaraan berat dan yang berhenti serta iklim (curah hujan)
Kelandaian 1 (<6%) Kelandaian II (6–10%) Kelandaian III (>10%) % kendaraan berat % kendaraan berat % kendaraan berat
≤ 30% >30% ≤ 30% >30% ≤ 30% >30% Iklim I
< 900 mm/tahun 0,5 1,0 – 1,5 1,0 1,5 – 2,0 1,5 2,0 – 2,5 Iklim II
≥ 900 mm/tahun 1,5 2,0 – 2,5 2,0 2,5 – 3,0 2,5 3,0 – 3,5 Sumber: Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa
Komponen SKBI 2.3.26.1987
E. .Koefisien Distribusi Kendaraan
[image:33.612.129.505.215.469.2]Koefisien distribusi kendaraan (C) untuk kendaraan ringan dan berat yang lewat pada jalur rencana ditentukan menurut daftar di bawah ini :
Tabel 2.7 Koefisien Distribusi Kendaraan
Jumlah lajur Kendaraan ringan *) Kendaraan berat **) 1 arah 2 arah 1 arah 2 arah 1 lajur
2 lajur 3 lajur 4 lajur 5 lajur 6 lajur
1,00 0,60 0,40 - - -
1,00 0,50 0,40 0,30 0,25 0,20
1,00 0,70 0,50 - - -
1,00 0,50 0,475
0,45 0,425
0,40
commit to user
Sumber: Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa Komponen SKBI 2.3.26.1987
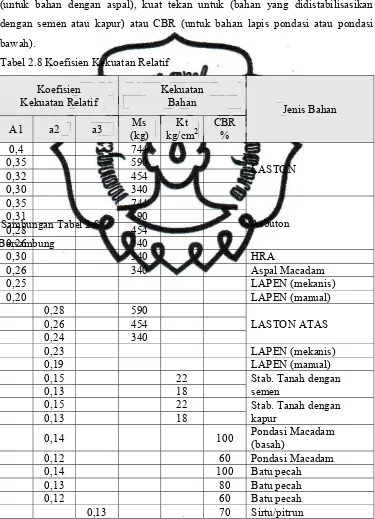
F. Koefisien Kekuatan Relatif (A)
Koefisien kekuatan relative (a) masing-masing bahan dan kegunaan sebagai lapis permukaan pondasi bawah, ditentukan secara korelasi sesuai nilai Marshall Test
[image:34.612.133.508.190.709.2](untuk bahan dengan aspal), kuat tekan untuk (bahan yang didistabilisasikan dengan semen atau kapur) atau CBR (untuk bahan lapis pondasi atau pondasi bawah).
Tabel 2.8 Koefisien Kekuatan Relatif
Koefisien Kekuatan Relatif
Kekuatan Bahan
Jenis Bahan A1 a2 a3 Ms
(kg)
Kt kg/cm2
CBR %
0,4 744 LASTON 0,35 590 0,32 454 0,30 340 0,35 744
Asbuton 0,31 590 0,28 454 0,26 340
0,30 340 HRA
0,26 340 Aspal Macadam 0,25 LAPEN (mekanis) 0,20 LAPEN (manual)
0,28 590
LASTON ATAS 0,26 454
0,24 340
0,23 LAPEN (mekanis) 0,19 LAPEN (manual) 0,15 22 Stab. Tanah dengan
semen 0,13 18
0,15 22 Stab. Tanah dengan kapur
0,13 18
0,14 100 Pondasi Macadam (basah)
0,12 60 Pondasi Macadam 0,14 100 Batu pecah 0,13 80 Batu pecah 0,12 60 Batu pecah 0,13 70 Sirtu/pitrun Bersambung
commit to user
0,12 50 Sirtu/pitrun 0,11 30 Sirtu/pitrun 0,10 20 Tanah / lempung
kepasiran
Sumber: Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa Komponen SKBI 2.3.26.1987
G. Analisa komponen perkerasan
Penghitungan ini didstribusikan pada kekuatan relatif masing-masing lapisan perkerasan jangka tertentu (umur rencana) dimana penetuan tebal perkerasan dinyatakan oleh Indeks Tebal Perkerasan (ITP) dengan rumus:
3 3 2 2 1
1D a D a D
a
ITP= + + ... (55) D1,D2,D3 = Tebal masing-masing lapis perkerasan (cm)
a1, a2, a3 = Koefisien kekuatan relatif bahab perkerasan (SKBI 2.3.26.1987)
Angka 1,2,3 masing-masing lapis permukaan, lapis pondasi atas dan pondasi bawah
2.6. Rencana Anggaran Biaya (RAB)
Untuk menentukan besarnya biaya yang diperlukan terlebih dahulu harus diketahui volume dari pekerjaan yang direncanakan. Pada umumnya pembuat jalan tidak lepas dari masalah galian maupun timbunan. Besarnya galian dan timbunan yang akan dibuat dapat dilihat pada gambar long profile. Sedangkan volume galian dapat dilihat melalui gambar Cross Section.
Selain mencari volume galian dan timbunan juga diperlukan untuk mencari volume dari pekerjaan lainnya yaitu:
1. Volume Pekerjaan a. Umum
− Pengukuran
− Mobilisasi dan Demobilisasi
− Pembuatan papan nama proyek
commit to user
− Administrasi dan Dokumentasi b. Pekerjaan tanah
− Pembersihan semak dan pengupasan tanah
− Persiapan badan jalan
− Galian tanah (biasa)
− Timbunan tanah (biasa)
c. Pekerjaan Drainase
− Galian saluran
− Pasangan batu dengan mortar
− Plesteran
− Siaran
d. Pekerjaan perkerasan
− Lapis pondasi bawah (sub base course)
− Lapis pondasi atas (base course)
− Prime Coat
− Lapis Laston e. Pekerjaan pelengkap
− Marka jalan
− Rambu jalan
− Patik kilometer
2. Analisa Harga Satuan
Analisa harga satuan diambil dari Harga Satuan Dasar Upah Dan Bahan Serta Biaya Operasi Peralatan Dinas Bina Marga Jawa Tengah, tahun 2003 untuk penghitungan Rencana Anggaran Biaya digunakan analisa K.
3. Kurva S
commit to user
35
BAB III
PERENCANAAN JALAN
3.1 Perencanaan Trace Jalan dari Desa Jepanan sampai Pandeyan
Perencanaan Jalan dari Desa Jepanan sampai Pandeyan,mempunyai kontur tanah datar dengan melewati 1 buah sungai dengan bentang 100 meter, kedalaman 12 m dan terdapat 3 tikungan.
A
PI1
PI2
PI3
B
U
(0; 0)
(1,129; 6,401) (8,418; 15,284)
( 12,608; 21,505)
(15,272; 30,656)
d
X Y
U U
U U
A
-1
1-2
d d2-3
3-B
d
αΑ- 1 =10, 000
α1- 2 = 39,372
α2- 3 = 33,966
α3- B = 16,226
∆1 =29,372 ∆2 =5,406
[image:37.612.174.443.223.471.2]∆3 =17,740
Gambar 3.1 Azimuth Jalan
commit to user
Dari peta diketahui rencana jalan raya dengan titik koordinatnya:
A : ( 0 ; 0 )
PI1 : ( 112,9 ; 640,1 )
PI2 : ( 841,8 ; 1528,4 )
PI3 : ( 1260,8 ; 2150,5 )
B : ( 1527,2 ; 3065,6 )
commit to user
3.1.1. Penghitungan sudut ∆PI
" 12 ' 22 29 " 0 ' 0 10 " 12 ' 22 39 ) ( ) ( 0 0 0 1 2 1 1 = − = − =
∆ α− αA−
" 36 ' 24 5 " 36 ' 57 33 " 12 ' 22 39 ) ( ) ( 0 0 0 3 2 2 1 2 = − = − = ∆ α− α − " 48 ' 43 17 " 48 ' 13 16 " 36 ' 57 33 ) ( ) ( 0 0 0 3 3 2 3 = − = − =
∆ α − α −B
3.1.2. Penghitungan jarak
a. Dengan rumus Phytagoras
m
y y x
x
dA A A
98 , 649 ) 0 1 , 640 ( ) 0 9 , 112 ( ) ( ) ( 2 2 2 1 2 1 1 = − + − = − + − = − m y y x x d 07 , 1149 ) 1 , 640 4 , 1528 ( ) 9 , 112 8 , 841 ( ) ( ) ( 2 2 2 1 2 2 1 2 2 1 = − + − = − + − = − m y y x x d 05 , 750 ) 4 , 1528 5 , 2150 ( ) 8 , 841 8 , 1260 ( ) ( ) ( 2 2 2 2 3 2 2 3 3 2 = − + − = − + − = − m y y x x
d B B
commit to user
b. Dengan rumus Sinusm Sin xA x d A A 98 , 649 " 0 ' 0 10 sin 0 9 , 112 0 1 1 1 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − − α m x x d 07 , 1149 " 12 ' 22 39 sin 9 , 112 8 , 841 sin 0 2 1 1 2 2 1 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − − α m x x d 05 , 750 " 36 ' 57 33 sin 8 , 841 8 , 1260 sin 0 3 2 2 3 3 2 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − − α m x x d B B B 09 , 953 " 48 ' 13 16 sin 8 , 1260 2 , 1527 sin 0 3 3 3 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − − α
c. Dengan rumus Cosinus
commit to user
m y y d 05 , 750 " 36 ' 57 33 cos 4 , 1528 5 , 2150 cos 0 3 2 2 3 3 2 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − − α m y y d B B B 09 , 953 " 48 ' 13 16 cos 5 , 2150 6 , 3065 cos 0 3 3 3 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − − α 3.1.3.Kelandaian MelintangUntuk mengklarifikasi jenis medan dalam perencanaan jalan raya perlu diketahui kelandaian melintang pada medan dengan ketentuan :
a. Kelandaian dihitung tiap 50 m
b. Potongan melintang 200 m dengan tiap samping jalan masing-masing sepanjang 100 m dari as jalan
c. Harga kelandaian melintang dan ketinggian samping kiri dan samping kanan jalan sepanjang 100 m , diperoleh dengan :
i = L
h
∆
x 100 %
h = ⎥
⎦ ⎤ ⎢
⎣ ⎡
− xbedatiggi
kontur antar jarak titik terhadap kontur jarak kontur Elevasi dimana:
i : Kelandaian melintang L : Panjang potongan (200m)
commit to user
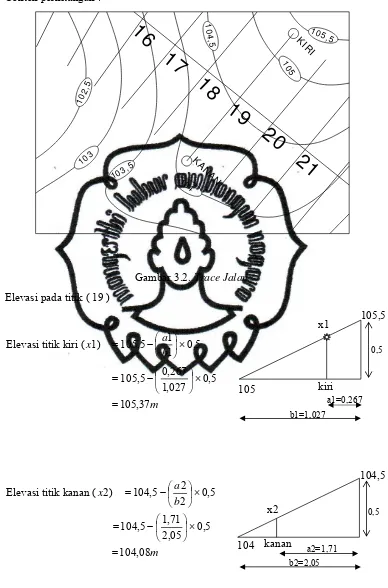
Contoh perhitungan :20
21
16
17
18
19
10 2,5 104 103, 5 103 105,5 1 0 4 ,5 1 0 5 KA N AN K I RIGambar 3.2. Trace Jalan
Elevasi pada titik ( 19 )
[image:42.612.128.516.89.677.2]commit to user
Bersambung kehalaman berikutnyaTabel 3.1. Kelandaian melintang dan memanjang
No STA
Elevasi ∆h
Kelandaian melintang
Kelandaian melintang
(%)
Klasifikasi medan Kiri Tengah Kanan
1 0+000 100,22 99,91 99,35 0,88 0,44 Datar
2 0+050 100,87 100,32 99,44 1,43 0,72 Datar
3 0+100 101,37 100,57 99,57 1,80 0,90 Datar
4 0+150 101,66 100,66 99,64 2,02 1,01 Datar
5 0+200 101,76 100,60 99,62 2,14 1,07 Datar
6 0+250 101,68 100,59 99,60 2,08 1,04 Datar
7 0+300 101,71 100,63 100,00 1,71 0,85 Datar
8 0+350 101,74 100,60 100,00 1,74 0,87 Datar
9 0+400 101,72 100,53 100,00 1,72 0,86 Datar
10 0+450 101,68 100,52 101,00 0,68 0,34 Datar
11 0+500 101,70 100,54 101,00 0,70 0,35 Datar
12 0+550 101,73 100,81 101,21 0,52 0,26 Datar
13 0+600 101,91 101,48 101,50 0,41 0,20 Datar
14 0+650 102,59 102,31 101,50 1,09 0,54 Datar
15 0+700 103,09 102,74 101,30 1,79 0,90 Datar
16 0+750 103,70 103,11 102,50 1,20 0,60 Datar
17 0+800 104,25 103,47 102,63 1,62 0,81 Datar
18 0+850 104,76 103,89 103,08 1,68 0,84 Datar
19 0+900 105,14 104,33 103,58 1,57 0,78 Datar
20 0+950 105,37 104,58 104,08 1,28 0,64 Datar
21 1+000 105,26 104,59 104,08 1,18 0,59 Datar
22 1+050 104,92 104,46 104,50 0,42 0,21 Datar
23
commit to user
Bersambung kehalaman berikutnyaSambungan Tabel 3.1
24
1+150 104,00 103,40 103,34 0,66 0,33 Datar
25 1+200 102,79 102,68 102,70 0,09 0,05 Datar
26 1+250 100,59 100,54 100,67 0,08 0,04 Datar
27 1+300 94,65 95,38 95,72 1,07 0,54 Datar
28 1+350 94,70 95,50 93,62 1,08 0,54 Datar
29 1+400 100,35 103,56 99,79 0,56 0,28 Datar
30
1+450 102,20 102,96 102,60 0,40 0,20 Datar
31 1+500 103,39 104,22 103,83 0,44 0,22 Datar
32 1+550 104,63 105,20 104,90 0,28 0,14 Datar
33 1+600 105,44 105,85 105,57 0,13 0,06 Datar
34 1+650 106,20 105,92 105,17 1,03 0,51 Datar
35 1+700 106,50 105,37 104,62 1,88 0,94 Datar
36 1+750 105,41 104,72 104,05 1,35 0,68 Datar
37 1+800 104,93 104,09 103,30 1,63 0,81 Datar
38 1+850 104,42 103,46 102,77 1,65 0,82 Datar
39 1+900 104,10 103,07 102,00 2,10 1,05 Datar
40 1+950 103,81 102,84 101,42 2,39 1,20 Datar
41 2+000 103,63 102,80 101,34 2,29 1,14 Datar
42 2+050 103,54 102,83 101,45 2,09 1,05 Datar
43 2+100 103,53 102,88 101,91 1,63 0,81 Datar
44 2+150 103,57 103,00 102,29 1,28 0,64 Datar
45 2+200 103,63 103,18 102,61 1,01 0,51 Datar
46 2+250 103,76 103,37 102,92 0,84 0,42 Datar
47 2+300 104,50 103,66 103,22 1,28 0,64 Datar
48 2+350 104,34 104,02 103,57 0,78 0,39 Datar
commit to user
50
2+450 104,96 104,62 104,22 0,74 0,37 Datar
51 2+500 105,35 104,95 104,63 0,72 0,36 Datar
52 2+550 105,67 105,30 104,77 0,90 0,45 Datar
53 2+600 105,79 105,20 104,59 1,2 0,60 Datar
54 2+650 105,83 105,43 104,96 0,87 0,44 Datar
55 2+700 105,91 105,46 105,05 0,86 0,43 Datar
56 2+750 105,88 105,31 104,84 1,04 0,52 Datar
57 2+800 105,65 105,13 104,60 1,05 0,53 Datar
58 2+850 105,48 104,98 104,43 1,04 0,52 Datar
59 2+900 105,41 104,90 104,39 1,02 0,51 Datar
60 2+950 105,41 104,87 104,39 1,02 0,51 Datar
61 3+000 105,46 104,90 104,42 1,04 0,52 Datar
62 3+050 105,02 104,97 104,46 0,56 0,28 Datar
63 3+100 105,50 105,02 104,50 1,00 0,50 Datar
64 3+150 105,38 105,03 104,47 0,91 0,46 Datar
65 3+200 105,20 104,89 104,43 0,77 0,39 Datar
66 3+250 105,50 104,69 104,36 1,14 0,57 Datar
67 3+300 104,72 104,44 104,23 0,49 0,25 Datar
68 3+350 104,46 104,22 104,50 0,04 0,02 Datar
69 3+400 104,25 103,99 103,81 0,44 0,22 Datar
70 3+450 104,04 103,78 103,59 0,45 0,22 Datar
commit to user
3.2 Penghitungan Alinemen Horizontal
Data-data standar Perencanaan Geometri Antar Kota 1997 untuk jalan arteri. Vr = 80 km/jam
en = 2 %
emax = 10 %
w = ( 2 x 3,5 m ) C = 0,4 m = 200 n = 2 m c = 0,8 m b = 2,6 m p = 7,6 m a = 2,1 m Jh = 150 m Jd = 600 m
(
)
14 , 0
80 00125 , 0 24 , 0
max
=
× −
=
f
(
)
( )
(
)
m f e
Vr R
974 , 209
14 , 0 1 , 0 127
80 127
2 max max
2 min
=
+ =
+ =
min 39 , 1432
max
R
D =
0
822 , 6
974 , 209
39 , 1432
= =
3.2.1. Tikungan PI 1 Data tikungan : ∆1 = 29o22’12”
commit to user
1. Mencari superelevasi
0 183 , 3 450 39 , 1432 39 , 1432 = = = Rren D % 15 , 7 0715 , 0 822 , 6 183 , 3 1 , 0 2 822 , 6 183 , 3 1 , 0 . 2 2 2 max max 2 max 2 max = = × × + × − = × × + × − = D D e D D e etjd ! ... 1 , 0 0715 , 0 max ok e
etjd < = <
2. Penghitungan lengkung peralihan (Ls)
1. Berdasarkan waktu tempuh maximum (3 detik) untuk melintasi lengkung peralihan, maka panjang lengkung :
m t Vr Ls 667 , 66 3 6 , 3 80 6 , 3 = × = × =
2. Berdasarkan rumus modifikasi Short :
commit to user
3. Berdasarkan tingkat pencapaian perubahan kelandaian :
(
)
(
)
m Vr e e Ls normal 111 , 71 80 025 , 0 6 , 3 02 , 0 1 , 0 Re 6 , 3 max = × × − = × × − =4. Berdasarkan rumus bina marga
m m e en w Ls tjd 085 , 64 200 ) 0715 , 0 02 , 0 ( 2 5 , 3 2 ) ( 2 = × + × × = × + × =
Dipakai nilai Ls yang terbesar yaitu 71,111m
3. Perhitungan besaran tikungan
" 48 ' 31 4 450 2 14 , 3 2 360 111 , 71 2 2 360 0 = × × × × = × × = Rr Ls Qs π
(
)
(
)
" 36 ' 18 20 " 48 ' 31 4 2 " 12 ' 22 29 2 0 0 0 1 = × − = × − ∆ =∆c Qs
m Rr c Lc 459 , 159 180 450 14 , 3 " 36 ' 18 20 180 0 = × × = × × ∆ = π
Syarat tikungan S-C-S
commit to user
(
)
(
)
m Qs Rr Rr Ls P 468 , 0 " 48 ' 31 4 cos 1 450 450 6 111 , 71 cos 1 6 0 2 2 = − − × = − − × = m Qs Rr Rr Ls Ls K 530 , 35 " 48 ' 31 4 sin 450 ) 450 ( 40 ) 111 , 71 ( 111 , 71 sin 40 0 2 3 2 3 = × − × − = × − × − =(
)
(
)
m K P Rr Ts 590 , 153 530 , 35 " 12 ' 22 29 / tan 468 , 0 450 / tan 0 2 1 1 2 1 = + × + = + ∆ × + = m Rr P Rr Es 681 , 15 450 " 12 ' 22 29 / cos 468 , 0 450 / cos 0 2 1 1 2 1 = − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∆ + = m Ls Lc Ltotal 681 , 301 ) 111 , 71 2 ( 459 , 149 ) 2 ( = × + = × + = 681 , 301 181 , 307 2 > > ×Ts Ltotal(Tikungan S-C-S bisa digunakan)
4. Perhitungan pelebaran perkerasan
commit to user
m Rr Vr z 396 , 0 450 80 105 , 0 105 , 0 = × = × = m z Td n c b n B 365 , 7 396 , 0 0404 , 0 ) 1 2 ( ) 8 , 0 664 , 2 ( 2 ) 1 ( ) ' ( = + − + + = + − + + = m W B E tambahan lebar E 365 , 0 ) 5 , 3 2 ( 365 , 7 = × − = − = =B>W maka pada tikungan PI1 diperlukan pelebaran perkerasan 0,365 m
5. Perhitungan kebebasan samping
m W Rr dalam jalan AS jari Jari R 25 , 448 / 450 / ' 4 7 4 1 = − = − = − = m W jalan penguasaan daerah lebar Mo 5 , 11 2 7 30 2 . . . = − = − = m Ls Lc horisontal lengkung total panjang L 681 , 301 ) 111 , 71 2 ( 459 , 159 2 = × + = + = =
Berdasarkan jarak pandang henti untuk Jh < L → 150 < 301,681 m
commit to user
Berdasarkan jarak pandang menyiapuntuk Jm > L → 600 > 301,681 m
(
)
(
)
m R L L Jm R L R m 442 , 74 25 , 448 14 , 3 681 , 301 90 sin 681 , 301 600 / 25 , 448 14 , 3 681 , 301 90 cos 1 25 , 448 ' 90 sin / ' 90 cos 1 ' 2 1 2 1 = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − = π πKarena Mo < M sehingga ruang bebas samping yang tersedia tidak mencukupi, sehingga perlu dipasang rambu dilarang menyiap sebelum masuk tikungan.
6. Data tikungan PI1
Jenis Tikungan : Spiral – Circle – Spiral ∆1 : 29022’12”
Vren : 80km/jam
Rmin : 209,974 m
Rren : 450 m
enormal : 2 %
emax : 10 %
etjd : 7,15 %
∆c : 20018’36”
Lc : 159,459 m m : 200 m
Dmax : 6,822 m
commit to user
B : 7,365 m E : 0,365 m Jh : 150 m Jm : 600 m Mo : 11.5 mMhenti : 6,266 m
Msiap : 74,442 m
commit to user
3.2.2. Tikungan PI 2 Data tikungan : ∆2 = 5o24’36”
Rren = 1000 m
1. Mencari superelevasi
432 , 1 1000 39 , 1432 39 , 1432 = = = Rren D % 76 , 3 0376 , 0 822 , 6 432 , 1 1 , 0 2 822 , 6 432 , 1 1 , 0 . 2 2 2 max max 2 max 2 max = = × × + × − = × × + × − = D D e D D e etjd ! ... 1 , 0 0376 , 0 max ok e
etjd < = <
2. Penghitungan lengkung peralihan (Ls)
1. Berdasarkan waktu tempuh maximum (3 detik) untuk melintasi lengkung peralihan, maka panjang lengkung :
m t Vr Ls 667 , 66 3 6 , 3 80 6 , 3 = × = × =
2. Berdasarkan rumus modifikasi Short :
commit to user
3. Berdasarkan tingkat pencapaian perubahan kelandaian :
(
)
(
)
m Vr e e Ls normal 111 , 71 80 025 , 0 6 , 3 02 , 0 1 , 0 Re 6 , 3 max = × × − = × × − =4. Berdasarkan rumus bina marga
m m e en w Ls tjd 310 . 40 200 ) 0376 , 0 02 , 0 ( 2 5 , 3 2 ) ( 2 = × + × × = × + × =
Dipakai nilai Ls yang terbesar yaitu 71,111 m
3. Perhitungan besaran tikungan
m Rc Tc 211 , 47 " 36 ' 24 5 / tan 1000 / tan 0 2 1 2 2 1 = × = ∆ × = m Tc Ec 114 , 1 " 36 ' 24 5 / tan 211 , 47 / tan 0 4 1 2 4 1 = × = ∆ × = m Rr Lc 304 , 94 360 1000 14 , 3 2 " 36 ' 24 5 360 0 2 = × × × = × × ∆ = π
Syarat tikungan FC
! ... 20 304 , 94 211 , 47 2 2 10 " 36 ' 24
50 0 2
ok Lc
Tc> = × > >
< =
commit to user
m Lc Ltotal 304 , 94 = = m Ltotal Tc 304 , 94 422 , 94 2 > > ×(Tikungan FC bisa digunakan)
4. Perhitungan pelebaran perkerasan
m P Rr Rr b b 629 , 2 6 , 7 1000 1000 6 , 2 ' 2 2 2 2 = − − + = − − + = m Rr A P A Rr Td 0182 , 0 1000 ) 1 , 2 6 , 7 2 ( 1 , 2 100 ) 2 ( 2 2 = − + × + = − + + = m Rr Vr z 266 , 0 1000 80 105 , 0 105 , 0 = × = × = m z Td n c b n B 142 , 7 266 , 0 0182 , 0 ) 1 2 ( ) 8 , 0 629 , 2 ( 2 ) 1 ( ) ' ( = + − + + = + − + + = m W B E tambahan lebar E 142 , 0 ) 5 , 3 2 ( 142 , 7 = × − = − = =
B>W maka pada tikungan PI1 diperlukan pelebaran perkerasan 0,142 m
5. Perhitungan kebebasan samping
commit to user
m W jalan penguasaan daerah lebar Mo 5 , 11 2 7 30 2 . . . = − = − = m Lc horisontal lengkung total panjang L 304 , 94 = = =Berdasarkan jarak pandang henti untuk Jh > L → 150 > 94,304 m
m R Jh R m 819 , 2 ) 25 , 998 14 , 3 150 90 cos 1 ( 25 , 998 ) ' 90 cos 1 ( ' = × × − = × × − = π
Berdasarkan jarak pandang menyiapuntuk Jm > L → 600 > 94,304 m
(
)
(
)
m R L L Jm R L R m 947 , 23 25 , 998 14 , 3 304 , 94 90 sin 304 , 94 600 / 25 , 998 14 , 3 304 , 94 90 cos 1 25 , 998 ' 90 sin / ' 90 cos 1 ' 2 1 2 1 = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − = π πKarena Mo < M sehingga ruang bebas samping yang tersedia tidak mencukupi, sehingga perlu dipasang rambu dilarang menyiap sebelum masuk tikungan.
6. Data tikungan PI2
Jenis Tikungan : Full – Circle ∆2 : 5024’36”
Vren : 80km/jam
Rmin : 209,974 m
Rren : 1000 m
enormal : 2 %
commit to user
etjd : 3,76%Ls : 71,111 m m : 200 m
Dmax : 6,822 m
D : 1,432 m Lc : 94,304 m Ec : 1,114 m Tc : 47,211 m B : 7,142 m E : 0,142 m Jh : 150 m Jm : 600 m Mo : 11,5 m
Mhenti : 2,819 m
Msiap : 23,947 m
commit to user
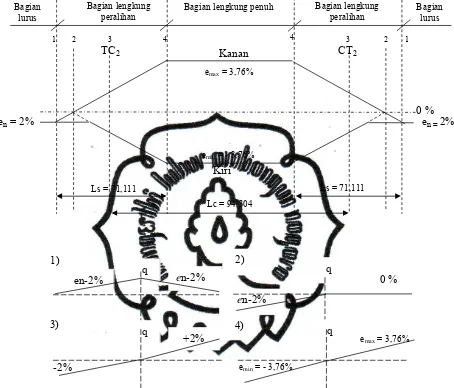
Bagian lengkung penuh Bagianlurus
Bagian lurus Bagian lengkung
peralihan
[image:58.612.91.545.110.498.2]Bagian lengkung peralihan
Gambar 3.4. Diagram Super Elevasi Tikungan PI 2
( Full Circle) q
en-2% en-2%
q
en-2%
0 %
q
-2%
+2% 1)
q 4)
3)
2)
emax = 3,76%
emin = - 3,76%
0 %
3
TC2 2
1 4
en = 2% en = 2%
4 3 2 1
CT2
emax = 3,76%
emin = - 3,76%
Kanan
Kiri
Lc = 94,304
commit to user
3.2.3 Tikungan PI3 Data tikungan : ∆3 = 17o43’48”
Rren = 300 m
1. Mencari superelevasi
0 775 , 4 300 39 , 1432 39 , 1432 = = = Rren D % 1 , 9 091 , 0 822 , 6 775 , 4 1 , 0 2 822 , 6 775 , 4 1 , 0 . 2 2 2 max max 2 max 2 max = = × × + × − = × × + × − = D D e D D e etjd ! ... 1 , 0 091 , 0 max ok e
etjd < = <
2. Penghitungan lengkung peralihan (Ls)
1. Berdasarkan waktu tempuh maximum (3 detik) untuk melintasi lengkung peralihan, maka panjang lengkung :
m t Vr Ls 667 , 66 3 6 , 3 80 6 , 3 = × = × =
2. Berdasarkan rumus modifikasi Short :
commit to user
3. Berdasarkan tingkat pencapaian perubahan kelandaian :
(
)
(
)
m Vr e e Ls normal 111 , 71 80 025 , 0 6 , 3 02 , 0 1 , 0 Re 6 , 3 max = × × − = × × − =4. Berdasarkan rumus bina marga
m m e en w Ls tjd 696 , 77 200 ) 091 , 0 02 , 0 ( 2 5 , 3 2 ) ( 2 = × + × × = × + × =
Dipakai nilai Ls yang terbesar yaitu 77,696m
3. Perhitungan besaran tikungan
" 12 ' 25 7 300 2 14 , 3 2 360 696 , 77 2 2 360 0 = × × × × = × × = Rr Ls Qs π
(
)
(
)
" 24 ' 53 2 " 12 ' 25 7 2 " 48 ' 1743 17 2 0 0 0 3 = × − = × − ∆ =∆c Qs
m Rr c Lc 143 , 15 180 300 14 , 3 " 24 ' 53 2 180 0 = × × = × × ∆ = π
Syarat tikungan S-S
! ... 20 143 , 15 ok
commit to user
m Rr P Rr Es 846 , 4 300 " 48 ' 43 17 / cos 201 , 1 300 / cos 0 2 1 3 2 1 = − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∆ + = 839 , 92 364 , 93 > >Ls Ts( Tikungan S-S bisa digunakan )
4. Perhitungan pelebaran perkerasan
m P Rr Rr b b 696 , 2 6 , 7 300 300 6 , 2 ' 2 2 2 2 = − − + = − − + = m Rr A P A Rr Td 0605 , 0 300 ) 1 , 2 6 , 7 2 ( 1 , 2 300 ) 2 ( 2 2 = − + × + = − + + = m Rr Vr z 485 , 0 300 80 105 , 0 105 , 0 = × = × = m z Td n c b n B 538 , 7 485 , 0 0605 , 0 ) 1 2 ( ) 8 , 0 696 , 2 ( 2 ) 1 ( ) ' ( = + − + + = + − + + = m W B E tambahan lebar E 538 , 0 ) 5 , 3 2 ( 538 , 7 = × − = − = =
commit to user
5. Perhitungan kebebasan samping
m W Rr dalam jalan AS jari Jari R 25 , 298 / 300 / ' 4 7 4 1 = − = − = − = m W jalan penguasaan daerah lebar Mo 5 , 11 2 7 30 2 . . . = − = − = m Ls Lc horisontal lengkung total panjang L 821 , 200 ) 839 , 92 2 ( 143 , 15 2 = × + = + = =
Berdasarkan jarak pandang henti untuk Jh < L → 150 < 200,831 m
m R Jh R m 39 , 9 ) 25 , 298 14 , 3 150 90 cos 1 ( 25 , 298 ) ' 90 cos 1 ( ' = × × − = × × − = π
Berdasarkan jarak pandang menyiapuntuk Jm > L → 600 > 200,831 m
(
)
(
)
m R L L Jm R L R m 725 , 82 25 , 298 14 , 3 831 , 200 90 sin 831 , 200 600 / 25 , 298 14 , 3 831 , 200 90 cos 1 25 , 298 ' 90 sin / ' 90 cos 1 ' 2 1 2 1 = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × × − = π πcommit to user
6. Data tikungan PI3
Jenis Tikungan : Spiral – Spiral ∆3 : 17043’48”
Vren : 80km/jam
Rmin : 209,974 m
Rren : 300 m
enormal : 2 %
emax : 10 %
etjd : 9,1 %
∆c : 2027’2,27” Lc : 12,825 m m : 200 m
Dmax : 6,822 m
D : 4,775 m Qs : 8038’56,4” Ls : 92,839 m P : 1,141 m Es : 4,605 m Ts : 93,364 m B : 7,538 m E : 0,538 m Jh : 150 m Jm : 600 m Mo : 26,5 m
Mhenti : 9,39 m
Msiap : 80,504 m
commit to user
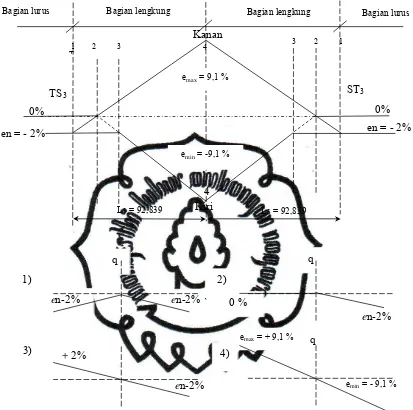
emax = + 9,1 %
emin = - 9,1 %
en-2%
en-2%
en-2%
+ 2%
Bagian lurus Bagian lengkung
Bagian lengkung Bagian lurus
4
[image:65.612.113.526.90.500.2]`
Gambar 3.5. Diagram Super Elevasi Tikungan PI 3 (STA : 2+549,1)
( Spiral – Spiral )
1)
4) 3)
2)
q q
en-2% 0 %
q en = - 2%
TS3
0% 0%
en = - 2% ST3
1 T
2 3 4 3 1 2
emax = 9,1 %
emin = -9,1 %
Kanan
Kiri
commit to user
3.3. Penghitungan Stationing dan Kontrol Overlapping
TS1
ST1 SC1
CS1
TC2 CT2
TS3 ST3 JEPANAN
[image:66.612.114.544.132.711.2]PANDEYAN
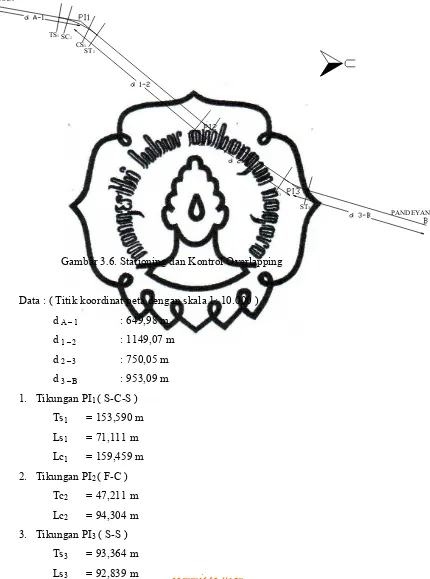
Gambar 3.6. Stationing dan Kontrol Overlapping
Data : ( Titik koordinat peta dengan skala 1: 10.000 ) d A – 1 : 649,98 m
d 1 – 2 : 1149,07 m
d 2 – 3 : 750,05 m
d 3 – B : 953,09 m
1. Tikungan PI1 ( S-C-S )
Ts1 = 153,590 m
Ls1 = 71,111 m
Lc1 = 159,459 m
2. Tikungan PI2 ( F-C )
Tc2 = 47,211 m
Lc2 = 94,304 m
3. Tikungan PI3 ( S-S )
Ts3 = 93,364 m
commit to user
3.3.1. Penghitungan stationing
(Digunakan titik koordinat dengan skala 1:5.000)
Sta A = 0+000
Sta TS1 = (d A – 1) – Ts1
= 649,98 – 153,590 = 0+496,39
Sta SC1 = Sta TS1 + Ls1
= (0+496,39) + 71,111 = 0+567,50
Sta CS1 = Sta SC1 + Lc1
= (0+567,50) + 159,459 = 0+726,96
Sta ST1 = Sta CS1 + Ls1
= (0+726,96) + 71,111 = 0+798,07
Sta TC2 = Sta ST1 + (d 1 – 2) – (Ts1 + Tc2)
= (0+798,07) + 1149,07 – (153,59 + 47,211) = 1+746,34
Sta CT2 = Sta TC2 + Lc2
= (1+746,34) + 94,304 = 1+840,644
Sta TS3 = Sta CT2 + (d 2 – 3) – (Tc2 + Ts3)
= (1+840,644) + 750,05 – (47,211+93,364) = 2+450,119
Sta ST3 = Sta TS3 + 2xLs3
= (2+450,119) + 2x93,364 = 2+636,847
Sta B = Sta ST3 + (d 3 – B)-Ts3
commit to user
3.3.2. Kontrol overlapping
Diketahui :
dtk m jam km ren
V
/ 22 , 22
3600 80000
/ 80
= = =
Syarat overlapping
m V
a ren
67 , 66
22 , 22 3 3
= × =
× =
d > a …ok ! Overlapping A-PI1
d = (d A – 1) – Ts1
= 649,98 – 153,590 = 496,39 m
d > a …ok ! Overlapping PI1-PI2
d = (d 1 – 2) – (Ts1 + Tc2)
= 1149,07 – (153,590 + 47,211) = 948,269 m
d > a …ok ! Overlapping PI2-PI3
d = (d 2 – 3) – (Tc2 + Ts3)
= 750,05 – (47,211 + 93,364) = 609,475 m
d > a …ok ! Overlapping PI3-B
d = (d 3 – B) – Ts3
68
Keterangan
= Elevasi Tanah asli
[image:69.792.55.759.120.381.2]= Elevasi Tanah Rencana
Gambar 3.7 Sket Kelandaian Memanjang
PI1
PI2
PI3
(S-C-S)
(F-C)
(S-S)
Keterangan :
commit to user
3.4 Penghitungan Alinemen Vertikal
3.4.1 Penghitungan kelandaian memanjang
Dengan menggunakan rumus:
% 100
× ∆ ∆ =
L h gn
data perhitungan:
Sta A = 0 + 000 hA = 99,91 Sta PV1 = 0 + 400 hPV1 = 100,53
Sta PV2 = 0 + 800 hPV2 = 103,47
Sta Jembatan = 1 + 300 hJem = 103,47 Sta PV3 = 2 + 250 hPV3 = 103,47
Sta PV4 = 2 + 950 hPV4 = 104,87
Sta B = 3 + 500 hB = 104,87
Penghitungan:
% 16 , 0 % 100 400
91 , 99 53 , 100
1 × =
− =
g
% 74 , 0 % 100 400
53 , 100 47 , 103
2 × =
− =
g
% 0 % 100 450
47 , 103 47 , 103
3 × =
− =
g
% 2 , 0 % 100 600
47 , 103 87 , 104
4 × =
− =
g
% 0 % 100 550
87 , 104 87 , 104
5 × =
− =
commit to user
3.4.2 Penghitungan lengkung vertikal
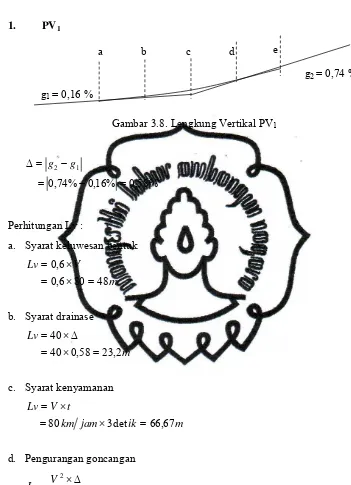
[image:71.612.125.476.100.585.2]1. PV1
Gambar 3.8. Lengkung Vertikal PV1
% 58 , 0 % 16 , 0 % 74 , 0
1 2
= −
= − =
∆ g g
Perhitungan Lv :
a. Syarat keluwesan bentuk
m V
Lv
48 80 6 , 0
6 , 0
= × =
× =
b. Syarat drainase
m Lv
2 , 23 58 , 0 40 40
= × =
∆ × =
c. Syarat kenyamanan
m ik
jam km
t V Lv
67 , 66 det
3
80 × =
= × =
d. Pengurangan goncangan
m V
Lv
31 , 10 360
58 , 0 80
360
2 2
= × =
∆ × =
Diambil Lv terbesar, yaitu = 66,67m
a b c d e
g1 = 0,16 %
commit to user
mLv
Ev 0,048
800 67 , 66 58 , 0
800 =
× = × ∆ =
m Lv
X
Y 0,012
67 , 66 200
) 67 , 66 4 1 ( 58 , 0 200
2 2
= ×
× × = × × ∆ =
Stationing lengkung vertikal PV1
Sta a = Sta PV1 – 1/2 Lv
= (0+400) – 1/2 66,67
= 0+366,67 m Sta b = Sta PV1 – 1/4 Lv
= (0+400) – 1/4 66,67
= 0+383,33 m Sta c = Sta PV1
= 0+400 m Sta d = Sta PV1 + 1/4 Lv
= (0+400) + 1/4 66,67
= 0+416,67 m Sta e = Sta PV1 + 1/2 Lv
= (0+400) + 1/2 66,67
= 0+433,33 m
Elevasi Lengkung vertikal:
Elevasi a = Elevasi PV1 – ( ½ Lv x g1 )
= 100,53 – (½ 66,67 x 0,16 %) = 100,477 m
Elevasi b = Elevasi PV1 – ¼ Lv x g1 + y
= 100,53 – ¼ 66,67 x 0,16 % + 0,012 = 100,515 m
Elevasi c = Elevasi PV1 + Ev
commit to user
Elevasi d = Elevasi PV1 + ¼ Lv x g2 + y= 100,53 + ¼ 66,67 x 0,74 % + 0,012 = 100,665 m
Elevasi e = Elevasi PV1 + ½ Lv x g2
= 100,53 + ½ 66,67 x 0,74 % = 100,777 m
2. PV2
[image:73.612.127.462.72.478.2].
Gambar 3.9. Lengkung Vertikal PV2
% 74 , 0 % 74 , 0 % 0
2 3
= −
= − =
∆ g g
Perhitungan Lv :
e. Syarat keluwesan bentuk
m V
Lv
48 80 6 , 0
6 , 0
= × =
× =
f. Syarat drainase
m Lv
60 , 29 74 , 0 40 40
= × =
∆ × =
g. Syarat kenyamanan
m ik
jam km
t V Lv
67 , 66 det
3
80 × =
= × =
a
b
c d e
g3 = 0 %
commit to user
h. Pengurangan goncanganm V
Lv
16 , 13 360
74 , 0 80
360
2 2
= × =
∆ × =
Diambil Lv terbesar, yaitu = 66,67m
m Lv
Ev 0,06
800 67 , 66 74 , 0
800 =
× = × ∆ =
m Lv
X
Y 0,02
67 , 66 200
) 67 , 66 4 1 ( 74 , 0
200
2 2
= ×
× × = × × ∆ =
Stationing lengkung vertikal PV2
Sta a = Sta PV2 – 1/2 Lv
= (0+800) – 1/2 66,67
= 0+766,67 m
Sta b = Sta PV2 – 1/4 Lv
= (0+800) – 1/4 66,67
= 0+783,33 m
Sta c = Sta PV2
= 0+800 m
Sta d = Sta PV2 + 1/4 Lv
= (0+800) + 1/4 66,67
= 0+816,67 m
Sta e = Sta PV2 + 1/2 Lv
= (0+800) + 1/2 66,67
= 0+833,33 m
Elevasi Lengkung vertikal: