commit to user
i
PERENCANAAN GEOMETRIK DAN RENCANA
ANGGARAN BIAYA RUAS JALAN KALISORO –
NGLEDOK KECAMATAN TAWANGMANGU
KABUPATEN KARANGANYAR
TUGAS AKHIR
Disusun sebagai Salah Satu Syarat untuk memperoleh Gelar Ahli Madya pada
Jurusan Teknik Sipil Fakultas Teknik
Universitas Sebelas Maret
Surakarta
Disusun Oleh :
FITRIA MUNITA SARI
I 8207005
PROGRAM DIPLOMA III
TEKNIK SIPIL TRANSPORTASI FAKULTAS TEKNIK
UNIVERSITAS SEBELAS MARET
SURAKARTA
commit to user
ii
PERENCANAAN GEOMETRIK DAN RENCANA
ANGGARAN BIAYA RUAS JALAN KALISORO –
NGLEDOK KECAMATAN TAWANGMANGU
KABUPATEN KARANGANYAR
TUGAS AKHIR
Disusun sebagai Salah Satu Syarat untuk memperoleh Gelar Ahli Madya pada
Jurusan Teknik Sipil Fakultas Teknik
Universitas Sebelas Maret
Surakarta
Disusun Oleh :
FITRIA MUNITA SARI
I 8207005
Surakarta, Juli 2010
Telah disetujui dan diterima oleh :
Dosen Pembimbing
commit to user
iii
PERENCANAAN GEOMETRIK DAN RENCANA
ANGGARAN BIAYA RUAS JALAN KALISORO –
NGLEDOK KECAMATAN TAWANGMANGU
KABUPATEN KARANGANYAR
TUGAS AKHIR Disusun Oleh :
FITRIA MUNITA SARI
I 8207005
Dipertahankan didepan Tim Penguji
Ir. Djoko Sarwono , MT .………... NIP. 19600415 199201 1 001
Ir. Agus Sumarsono, MT .………... NIP. 19570814 198601 1 001
Ir. Djumari, MT .………... NIP. 19571020 198702 1 001
Mengetahui :
Ketua Jurusan Teknik Sipil Fakultas Teknik UNS
Ir. Bambang Santoso, MT NIP. 1950823 198601 1 001
Disahkan :
Ketua Program D-III Teknik Sipil Jurusan Teknik Sipil FT UNS
Ir. Slamet Prayitno, MT NIP. 19531227 198601 1 001
Mengetahui : a.n. Dekan
Pembantu Dekan I Fakultas Teknik UNS
commit to user
iv
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Allah SWT yang telah melimpahkan rahmad,
hidayah serta inayahnya-Nya, sehingga Tugas Akhir dengan judul
“PERENCANAAN GEOMETRIK DAN RENCANA ANGGARAN BIAYA RUAS
JALAN KALISORO – NGLEDOK, KECAMATAN TAWANGMANGU,
KABUPATEN KARANGANYAR” dapat diselesaikan dengan baik.
Tugas Akhir ini merupakan salah satu syarat yang harus dipenuhi untuk meraih gelar
Ahli Madya pada Jurusan Teknik Sipil Universitas Sebelas Maret Surakarta. Dengan
adanya Tugas Akhir ini diharapkan dapat menambah pengetahuan dan pengalaman
mengenai perencanaan jalan bagi penulis maupun pembaca.
Pada kesempatan ini penulis mengucapkan terima kasih kepada semua pihak yang
telah membantu penyusunan dan pengerjaan Tugas Akhir ini. Secara khusus penulis
mengucapkan terima kasih kepada :
1. Ir.Mukahar, MSCE, selaku Dekan Fakultas Teknik Universitas Sebelas Maret
Surakarta.
2. Ir.Bambang Santoso, MT, Selaku Ketua Jurusan Teknik Sipil Fakultas Teknik
Universitas Sebelas Maret Surakarta.
3. Ir. Slamet Prayitno, MT Selaku Ketua Program D3 Jurusan Teknik Sipil
Fakultas Teknik Universitas Sebelas Maret Surakarta.
commit to user
v
5. Ir. Djoko Sarwono, MT Selaku Dosen Pembimbing Tugas Akhir.
6. Ir. Agus Sumarsono, MTSelaku Tim Dosen Penguji Tugas Akhir.
7. Ir. Djumari, MTSelaku Tim Dosen Penguji Tugas Akhir.
8. Teman –teman seperjuanganku D3 Teknik Sipil Transportasi angkatan 2007
(Dyaz, Mz. Rizal, Bowo, Baktiar, Aniz, Aji, Dadang, EP, Tri, Dewa, Heri), buat
Alm. Bagus ST semoga kamu tenang disisi-Nya dan tidak lupa untuk kakak”
angkatan 2004, 2005, 2006, & adik” tingkat angkatan 2008 terima kasih atas
kerja samanya dan dukungannya.
9. Teman-teman Kost “Didini 1” terima kasih banyak atas dukungan dan
bantuannya selama ini.
Dalam Penyusunan Tugas Akhir ini penulis menyadari masih terdapat kekurangan
dan jauh dari kesempurnaan, maka diharapkan saran dan kritik yang bersifat
membangun, akhir kata semoga Tugas Akhir ini dapat bermanfaat bagi kita semua,
amin.
Surakarta, Juli 2010
Penyusun
commit to user
MOTTO DAN PERSEMBAHAN
M OT T O :
W “Mencari ilmu adalah titik awal dan segala upaya untuk mengetahui dan meraih kemaslahatan hidup manusia baik dalam perbuatan, ucapan,
kenyakinan, etika, agama, dan adat istiadat. (Muhammad Al Ghazali).”
P ER SEM B A H A N :
ª Bapak dan Ibu tercinta
Terima kasih atas segala dukungan dan doanya selama ini, Fitria minta maaf
apabila selama ini sudah banyak merepotkan bapak ibu, semoga Tugas Akhir ini
dapat membuat Bapak Ibu senang, terima kasih.
Adikku yang kusayangi
Terima kasih atas do’a dan dukungannya
Dan semua pihak yang membantu dalam Tugas Akhir ini, Fitria cuma bisa
mengucapkan terima kasih semoga kebaikan semuanya dibalas oleh Allah SWT
commit to user
xviii
DESIGN INTERIOR
RIPARIAN RESTAURANT KAPUAS PONTIANAK WEST KALIMANTAN
Nugraheni a.1
Drs. Soepriyatmono, M.Sn2 Mulyadi,S.Sn,M.Ds 3
ABSTRACT
2010. City Pontianak West Kalimantan has equator monument and river kapuas that can be made landmark for this city. River Papuas and equator monument is a which are positive tour and beneficial. But in this time potential tour unworked well. Second landmark this be good fascination if is waked up a building insides the area. So that will fit once be built a restaurant because superiority batural beauty fascination will not be seen in vain, remember supporting facilities for tourism activity likes riparian restaurant not available expediently. As well as mutual will support with equator monument existence because each visitor can be made interesting for every this tour object.
Restaurant is a place that prepare food menu and drink. a also must give pleasant atmosphere for the occupant. Also play important role scenery aspect, like nature factor. Restaurant usually located in down town, city hem, edge coast or river, and in tourism region. This restaurant existence is supposed later will give share in will subsidize tourism sector especially in equator monument and can fulfil society need, even less remember in this time kalbar not yet has restaurant that has recreation facilities that present in river edge.
In planning and this restaurant planning, building more aim in Kalimantan tradisional building philosophy west that is Malay tradisional building and Dayaks. This tradisional philosophy use not just for gives natural atmosphere with environment context around, but also meant to overcome Kalimantan nature problems west like tall humidity factor. Air-g use in building will give a restaurant form natural. Direction will look at principal that be batural resources that be maked use River Kapuas and equator monument. By using Malay tradisional building concept and Dayaks Pontianak west Kalimantan so this restaurant aims in tradisional building and natural.
1. Student university, design direction interior with nim c0806022
2. Guide lecturer 1
commit to user
vii
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... ii
HALAMAN PENGESAHAN ... iii
MOTTO DAN PERSEMBAHAN ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vii
DAFTAR GAMBAR ... xi
DAFTAR TABEL ... xiii
DAFTAR NOTASI ... xv
DAFTAR LAMPIRAN ... xviii
BAB I PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Tujuan Perencanaan ... 2
1.3. Teknik Perencanaan ... 2
1.3.1. Perencanaan Geometrik Jalan ... 2
1.3.2. Perencanaan Tebal Perkerasan Lentur ... 3
1.3.3. Rencana Anggaran Biaya ... 4
1.4. Lingkup Perencanaan ... 4
BAB II DASAR TEORI 2.1. Pengertian Jalan Raya ... 5
2.2. Klasifikasi Jalan ... 5
2.3. Perencanaan Geometrik Jalan Raya ... 7
2.3.1. Alinemen Horisontal ... 7
2.3.2. Alinemen Vertikal ... 28
2.4. Alinemen Vertikal ... 32
commit to user
viii
Halaman
2.4.2. Angka Ekivalen (E) Beban Sumbu Kendaraan ... 34
2.4.3. Daya Dukung Tanah Dasar (DDT dan CBR) ... 34
2.4.4. Faktor Regional (FR) ... 34
2.4.5. Koefisien Distribusi Kendaraan ... 35
2.4.6. Koefisien Kekuatan Relative (a) ... 35
2.4.7. Analisa Komponen Perkerasan ... 37
2.5. Rencana Anggaran Biaya (RAB) ... 37
2.5.1. Volume Pekerjaan ... 37
2.5.2. Analisa Harga Satuan ... 38
2.5.3. Kurva S ... 39
BAB III PERENCANAAN JALAN 3.1. Penetapan Trace Jalan ... 40
3.1.1. Gambar Perbesaran Peta ... 40
3.1.2. Penghitungan Trace Jalan ... 40
3.1.3. Penghitungan Azimuth ... 42
3.1.4. Penghitungan Sudut PI ... 43
3.1.5. Penghitungan Jarak Antar PI ... 44
3.1.6 Perhitungan Kelandaian melintang ... 48
3.2. Perhitungan Alinemen Horizontal ... 53
3.2.1. Tikungan PI1 ... 54
3.2.2. Tikungan PI2 . ... 63
3.2.3. Hasil Perhitungan pada Tikungan PI1 s/d PI7 . ... 69
3.3. Perhitungan Stationing ... 77
3.4. Kontrol Overlapping ... 83
3.5. Perhitungan Alinemen Vertikal ... 88
3.5.1. Elevasi Jembatan Rencana ... 89
3.5.2. Perhitungan Kelandaian Memanjang ... 91
commit to user
ix
Halaman
BAB IV PERHITUNGAN TEBAL PERKERASAN
4.1. Data Perencanaan Tebal Perkerasan ... 133
4.2. Perhitungan Volume Lalu Lintas ... 135
4.2.1. Angka Ekivalen (E) Masing-Masing Kendaraan ... 136
4.2.2. Penentuan Koefisien Distribusi Kendaraan (C) ... 136
4.2.3. Perhitungan LEP, LEA, LET, dan LER ... 136
4.3. Penentuan CBR Desain Tanah Dasar ... 138
4.4. Penetapan Tebal Perkerasan ... 140
4.4.1. Perhitungan Indeks Tebal Perkerasan (ITP) ... 140
4.4.2. Penentuan Indeks Permukaan (IP) ... 141
4.4.3. Penentuan Indeks Tebal Perkerasan (ITP) ... 142
BAB V RENCANA ANGGARAN BIAYA DAN TIME SCHEDULE 5.1. Perhitungan Pekerjaan Tanah ... 145
5.1.1. Pekerjaan Galian Tanah ... 145
5.1.2. Pekerjaan Timbunan Tanah ... 147
5.2. Perhitungan Pekerjaan Perkerasan ... 156
5.2.1. Volume Lapis Permukaan ... 156
5.2.2. Volume Lapis Pondasi Atas ... 156
5.2.3. Volume Lapis Pondasi Bawah ... 157
5.2.4. Lapis Resap Pengikat (Prime Coat) ... 157
5.3. Pekerjaan Persiapan Badan Jalan Baru ... 157
5.4. Pekerjaan Pembersihan Semak dan Pengupasan Tanah ... 157
5.5. Perhitungan Pekerjaan Drainase ... 159
5.5.1. Volume Galian Saluran ... 159
5.5.2. Volume Pasangan Batu ... 159
5.5.3. Pekerjaan Plesteran ... 160
5.5.4. Pekerjaan Siaran ... 160
5.6. Perhitungan Volume Pekerjaan Dinding Penahan ... 161
commit to user
x
Halaman
5.6.2. Pasangan Batu untuk Dinding Penahan ... 166
5.6.3. Luas Plesteran ... 172
5.6.4. Luas Siaran ... 173
5.7. Perhitungan Marka Jalan ... 178
5.7.1. Marka di Tengah (Putus-putus) ... 178
5.7.2. Marka di Tengah (Menerus) ... 178
5.7.3. Luas Total Marka Jalan ... 178
5.8. Rambu Jalan ... 179
5.9. Patok Jalan ... 179
5.10. Analisa Perhitungan Waktu Pelaksanaan Proyek ... 179
5.10.1. Pekerjaan Umum ... 179
5.10.2. Pekerjaan Tanah ... 179
5.10.3. Pekerjaan Persiapan Badan Jalan ... 180
5.10.4. Pekerjaan Galian Tanah ... 180
5.10.5. Pekerjaan Timbunan Tanah... 180
5.10.6. Pekerjaan Drainase ... 181
5.10.7. Pekerjaan Dinding Penahan ... 182
5.10.8. Pekerjaan Perkerasan ... 183
5.10.9. Pekerjaan Pelengkap ... 185
5.11. Analisa Perhitungan Harga Satuan Pekerjaan ... 186
5.11.1. Harga Satuan Pekerjaan ... 186
5.11.2. Bobot Pekerjaan ... 187
BAB VI KESIMPULAN DAN SARAN 6.1. Kesimpulan ... 191
6.2. Saran ... 192
PENUTUP ... 193
commit to user
xi
DAFTAR GAMBAR
Halaman
Gambar 2.1. Lengkung Full Circle ... 11
Gambar 2.2. Lengkung Spiral – Circle – Spiral ... 13
Gambar 2.3. Lengkung Spiral – Spiral ... 15
Gambar 2.4. Diagram Superelevasi Full Circle ... 18
Gambar 2.5. Diagram Superelevasi Spiral – Circle – Spiral ... 19
Gambar 2.6. Diagram Superelevasi Spiral – Spiral ... 20
Gambar 2.7. Jarak Pandangan Pada Lengkung Horizontal untuk Jh < Lt ... 24
Gambar 2.8. Jarak Pandangan Pada Lengkung Horizontal untuk Jh > Lt ... 25
Gambar 2.9. Pelebaran Perkerasan Pada Tikungan ... 26
Gambar 2.10. Kontrol Overlaping ... 28
Gambar 2.11. Lengkung Vertikal Cembung ... 29
Gambar 2.12. Lengkung Vertikal Cekung ... 29
Gambar 2.13. Susunan Lapis Konstruksi Perkerasan Lentur ... 32
Gambar 3.1. Sketsa Sudut Azimut, Jarak PI, dan Sudut PI ... 41
Gambar 3.2. Sketsa Trace Jalan ... 49
Gambar 3.3. Diagram Superelevasi Tikungan PI1 ... 62
Gambar 3.4. Diagram Superelevasi Tikungan PI2 ... 71
Gambar 3.5. Diagram Superelevasi Tikungan PI3 ... 72
Gambar 3.6. Diagram Superelevasi Tikungan PI4 ... 73
Gambar 3.7. Diagram Superelevasi Tikungan PI5 ... 74
Gambar 3.8. Diagram Superelevasi Tikungan PI6 ... 75
Gambar 3.9. Diagram Superelevasi Tikungan PI7 ... 76
Gambar 3.10. Stasioning dan Kontrol Overlaping ... 87
Gambar 3.11. Lengkung Vertikal PVI1 ... 92
Gambar 3.12. Lengkung Vertikal PVI2 ... 95
Gambar 3.13. Lengkung Vertikal PVI3 ... 98
Gambar 3.14. Lengkung Vertikal PVI4 ... 101
commit to user
xii
Halaman
Gambar 3.16. Lengkung Vertikal PVI6 ... 107
Gambar 3.17. Lengkung Vertikal PVI7 ... 110
Gambar 3.18. Lengkung Vertikal PVI8 ... 113
Gambar 3.19. Lengkung Vertikal PVI9 ... 116
Gambar 3.20. Lengkung Vertikal PVI10 ... 119
Gambar 3.21. Lengkung Vertikal PVI11 ... 122
Gambar 3.22. Lengkung Vertikal PVI12 ... 125
Gambar 3.23. Lengkung Vertikal PVI13 ... 128
Gambar 4.1. Grafik Penentuan CBR Desain 90% ... 139
Gambar 4.2. Korelasi DDT dan CBR ... 140
Gambar 4.3. Penentuan Nilai Indeks Tebal Perkerasan (ITP) ... 142
Gambar 4.4. Susunan Perkerasan ... 144
Gambar 4.5. Typical Cross Section... 144
Gambar 5.1. Typical Cross section STA 0 + 100 ... 145
Gambar 5.2. Typical Cross section STA 1 + 350 ... 147
Gambar 5.3. Sket Lapis Permukaan ... 156
Gambar 5.4. Sket Lapis Pondasi Atas ... 156
Gambar 5.5. Sket Lapis Pondasi Bawah ... 157
Gambar 5.6. Sketsa Lokasi Talud dan Galian Saluran pada Dinding Penahan . 158 Gambar 5.7. Sket Volume Galian Saluran ... 159
Gambar 5.8. Sket Volume Pasangan Batu ... 159
Gambar 5.9. Detail Pot A – A pada Drainase ... 160
Gambar 5.10. Sket Volume Pasangan Batu pada Dinding Penahan ... 161
Gambar 5.11. Detail Potongan A – A (Volume Pasangan Batu) ... 172
commit to user
xviii
DAFTAR LAMPIRAN
1. LAMPIRAN A SOAL TUGAS AKHIR
2.
LAMPIRAN B LEMBAR KOMUNIKASI dan PEMANTAUAN3. LAMPIRAN C FORM SURVEY LALU-LINTAS
4. LAMPIRAN D DAFTAR HARGA SATUAN (Upah, Bahan dan
Peralatan)
5. LAMPIRAN E ANALISA HARGA SATUAN PEKERJAAN
6. LAMPIRAN F GAMBAR AZIMUT
7. LAMPIRAN G GAMBAR TRACE JALAN
8. LAMPIRAN H GAMBAR LONG PROFIL
9. LAMPIRAN I GAMBAR CROSSECTION
commit to user
xv
DAFTAR NOTASI
a : Koefisien Relatif
a` : Daerah Tangen
A : Perbedaan Kelandaian (g1 – g2) %
α : Sudut Azimuth
B : Perbukitan
C : Perubahan percepatan
Ci : Koefisien Distribusi
CS : Circle to Spiral, titik perubahan dari lingkaran ke spiral
CT : Circle to Tangen, titik perubahan dari lingkaran ke lurus
d : Jarak
D : Datar
D` : Tebal lapis perkerasan
∆ : Sudut luar tikungan
∆h : Perbedaan tinggi
Dtjd : Derajat lengkung terjadi
Dmaks : Derajat maksimum
DDT : Daya dukung tanah
e : Superelevasi
E : Daerah kebebasan samping
Ec : Jarak luar dari PI ke busur lingkaran
Ei : Angka ekivalen beban sumbu kendaraan
em : Superelevasi maksimum
en : Superelevasi normal
Eo : Derajat kebebasan samping
Es : Jarak eksternal PI ke busur lingkaran
Ev : Pergeseran vertical titik tengah busur lingkaran
f : Koefisien gesek memanjang
fm : Koefisien gesek melintang maksimum
commit to user
xvi
g : Kemiringan tangen ; (+) naik ; (-) turun
G : Pegunungan
h : Elevasi titik yang dicari
i : Kelandaian melintang
I : Pertumbuhan lalu lintas
ITP : Indeks Tebal Perkerasan
Jd : Jarak pandang mendahului
Jh : Jarak pandang henti
k : Absis dari p pada garis tangen spiral
L : Panjang lengkung vertikal
Lc : Panjang busur lingkaran
LEA : Lintas Ekivalen Akhir
LEP : Lintas Ekivalen Permulaan
LER : Lintas Ekivalen Rencana
LET : Lintas Ekivalen Tengah
Ls : Panjang lengkung peralihan
Ls` : Panjang lengkung peralihan fiktif
Lt : Panjang tikungan
O : Titik pusat
p : Pergeseran tangen terhadap spiral
θc : Sudut busur lingkaran
θs : Sudut lengkung spiral
PI : Point of Intersection, titik potong tangen
PLV : Peralihan lengkung vertical (titik awal lengkung vertikal)
PPV : Titik perpotongan tangen
PTV : Peralihan Tangen Vertical (titik akhir lengkung vertikal)
R : Jari-jari lengkung peralihan
Rren : Jari-jari rencana
Rmin : Jari-jari tikungan minimum
SC : Spiral to Circle, titik perubahan spiral ke lingkaran
S-C-S : Spiral-Circle-Spiral
commit to user
xvii
S-S : Spiral-Spiral
ST : Spiral to Tangen, titik perubahan spiral ke lurus
T : Waktu tempuh
Tc : Panjang tangen circle
TC : Tangen to Circle, titik perubahanlurus ke lingkaran
Ts : Panjang tangen spiral
TS : Tangen to Spiral, titik perubahan lurus ke spiral
Tt : Panjang tangen total
UR : Umur Rencana
Vr : Kecepatan rencana
Xs : Absis titik SC pada garis tangen, jarak lurus lengkung peralihan
Y : Factor penampilan kenyamanan
Ys : Ordinat titik SC pada garis tegak lurus garis tangen, jarak tegak
commit to user
xiii
DAFTAR TABEL
Halaman
Tabel 2.1. Klasifikasi Menurut Kelas Jalan ... 6
Tabel 2.2. Klasifikasi Menurut Medan Jalan ... 6
Tabel 2.3. Panjang Bagian Lurus Maksimum ... 8
Tabel 2.4. Panjang Jari-jari Minimum (dibulatkan) untuk emax = 10% ... 9
Tabel 2.5. Jari – jari Tikungan yang Tidak Memerlukan Lengkung Peralihan . 12 Tabel 2.6. Jarak Pandang Henti (Jh) Minimum ... 22
Tabel 2.7. Panjang Jarak Pandang Menyiap/ Mendahului ... 24
Tabel 2.8. Kelandaian Maksimum yang diijinkan ... 31
Tabel 2.9. Panjang Kritis (m) ... 32
Tabel 2.10. Faktor Regional (FR) ... 34
Tabel 2.11. Koefisien Distribusi Kendaraan ... 35
Tabel 2.12. Koefisien Kekuatan Relatif ... 36
Tabel 3.1. Perhitungan Kelandaian Melintang ... 50
Tabel 3.2. Hasil Perhitungan Tikungan PI1 s/d PI7 ... 70
Tabel 3.3. Elevasi Muka Tanah Asli ... 88
Tabel 3.4. Data Titik PVI ... 91
Tabel 3.5. Elevasi Tanah Asli dan Elevasi Tanah Rencana ... 131
Tabel 4.1. Nilai LHRs ... 133
Tabel 4.2. Perhitungan Nilai LHRs ... 134
Tabel 4.3. Hasil Perhitungan Lalu Lintas Harian Rata-rata LHRp & LHRA ... 135
Tabel 4.4. Hasil Perhitungan Angka Ekivalen utk Masing-masing Kend. ... 136
Tabel 4.5. Nilai LEP, LEA, LET, dan LER ... 138
Tabel 4.6. Data CBR Tanah Dasar ... 139
Tabel 4.7. Penetuan CBR Desain 90% ... 139
Tabel 5.1. Perhitungan Volume Galian dan Timbunan ... 149
Tabel 5.2. Perhitungan Volume Galian Pondasi pada Dinding Penahan ... 162
Tabel 5.3. Perhitungan Volume Pasangan Batu pada Dinding Penahan ... 168
commit to user
xiv
Halaman
Tabel 5.5. Rekapitulasi Perkiraan Waktu Pekerjaan ... 189
commit to user
1
BAB I
PENDAHULUAN
1.1
Latar Belakang
Perkembangan jalan raya merupakan salah satu hal yang selalu beriringan dengan
kemajuan teknologi dan pemikiran manusia yang menggunakannya, karenanya
jalan merupakan fasilitas penting bagi manusia supaya dapat mencapai suatu
daerah yang ingin dicapai.
Jalan raya adalah suatu lintasan yang bertujuan melewatkan lalu lintas dari suatu
tempat ke tempat yang lain. Arti Lintasan disini dapat diartikan sebagai tanah
yang diperkeras atau jalan tanah tanpa perkerasan, sedangkan lalu lintas adalah
semua benda dan makhluk hidup yang melewati jalan tersebut baik kendaraan
bermotor, tidak bermotor, manusia, ataupun hewan.
Pembuatan jalan yang menghubungkan Kalisoro - Ngledok yang terletak di
Kabupaten Karanganyar bertujuan untuk memperlancar arus transportasi,
menghubungkan serta membuka keterisoliran antara 2 daerah yaitu Kalisoro -
commit to user
1.2
Tujuan Perencanaan
Dalam perencanaan pembuatan jalan ini ada tujuan yang hendak dicapai yaitu :
1. Merencanakan bentuk geometrik dari jalan kelas fungsi kolektor.
2. Merencanakan tebal perkerasan pada jalan tersebut.
3. Merencanakan anggaran biaya dan Time Schedule yang dibutuhkan untuk
pembuatan jalan tersebut.
1.3 Teknik Perencanaan
Dalam penulisan ini perencanaan yang menyangkut hal pembuatan jalan akan
disajikan sedemikian rupa sehingga memperoleh jalan sesuai dengan fungsi dan
kelas jalan. Hal yang akan disajikan dalam penulisan ini adalah :
1.3.1. Perencanaan Geometrik Jalan
Dalam perencanaan geometrik jalan raya pada penulisan ini mengacu pada
Peraturan Perencanaan Geometrik Jalan Antar Kota Tahun 1997 dan Petunjuk
Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa
Komponen SKBI 2.3.26 Tahun 1987 yang dikeluarkan oleh Dinas Pekerjaan
Umum Direktorat Jenderal Bina Marga. Perencanaan geometrik ini akan
membahas beberapa hal antara lain :
1. Alinemen Horisontal
Alinemen ( garis tujuan ) horisontal merupakan trace jalan yang terdiri dari :
• Garis lurus ( tangent ), merupakan jalan bagian lurus.
commit to user
a.) Circle – Circleb.) Spiral – Circle – Spiral
c.) Spiral – Spiral
• Pelebaran perkerasan pada tikungan.
• Kebebasan samping pada tikungan
2. Alinemen Vertikal
Alinemen Vertikal adalah bidang tegak yang melalui sumbu jalan atau
proyeksi tegak lurus bidang gambar. Profil ini menggambarkan tinggi
rendahnya jalan terhadap muka tanah asli.
3. Stationing
4. Overlapping
1.3.2. Perencanaan Tebal Perkerasan Lentur
Penulisan ini membahas tentang perencanaan jalan baru yang menghubungkan
dua daerah. Untuk menentukan tebal perkerasan yang direncanakan sesuai dengan
Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode
Analisis Komponen Dinas Pekerjaan Umum Bina Marga. Satuan perkerasan yang
dipakai adalah sebagai berikut :
1. Lapis permukaan ( surface course ) : Laston MS 744
2. Lapis pondasi atas ( base course ) : Batu pecah CBR 100 %
commit to user
1.3.3 Rencana Anggaran BiayaMenghitung rencana anggaran biaya yang meliputi :
1. Volume Pekerjaan
2. Harga satuan Pekerjaan, bahan dan peralatan
3. Alokasi waktu penyelesaian masing-masing pekerjaan.
Dalam mengambil kapasitas pekerjaan satuan harga dari setiap pekerjaan
perencanaan ini mengambil dasar dari Analisa Harga Satuan tahun 2008 Dinas
Pekerjaan Umum Direktorat Jenderal Bina Marga Surakarta.
1.4 Lingkup Perencanaan
Dalam perencanaan pembuatan jalan ini ada lingkup perencanaan yang hendak
dicapai yaitu :
1. Merencanakan bentuk geometrik dari jalan kelas fungsi kolektor.
2. Merencanakan tebal perkerasan pada jalan tersebut.
3. Merencanakan anggaran biaya dan Time Schedule yang dibutuhkan untuk
commit to user
5
BAB II
DASAR TEORI
2.1.
Pengertian Jalan Raya
Jalan raya adalah suatu area tanah yang digunakan untuk dibangun fasilitas, guna
melayani pergerakan angkutan darat, yang direncanakan mengikuti kaidah-kaidah
perencanaan geometrik dan perencanaan struktur perkerasan jalan, yang
memungkinkan kendaraan berjalan dengan cepat, aman dan nyaman.
Jalan raya merupakan sarana pembangunan dan pengembangan wilayah. Dengan
adanya jalan hubungan lalu lintas antara daerah , dapat dilaksanakan dengan
lancar, cepat, aman namun tetap efisien dan ekonomis . Untuk itu suatu jalan
haruslah memenuhi syarat-syarat yang telah ditentukan.
2.2.
Klasifikasi Jalan
Jalan dibagi dalam kelas-kelas yang penetapannya kecuali didasarkan pada
fungsinya juga dipertimbangkan pada besarnya volume serta sifat lalu lintas yang
diharapkan akan menggunakan jalan yang bersangkutan.
1. Klasifikasi menurut fungsi jalan terbagi atas :
a. Jalan Arteri
b. Jalan Kolektor
commit to user
2. Klasifikasi menurut kelas jalan :
Klasifikasi menurut kelas jalan dan ketentuannya serta kaitannya dengan
klasifikasi menurut fungsi jalan dapat dilihat dalam tabel 2.1. (Pasal
II.PP.No.43/1993)
Tabel 2.1 Klasifikasi Menurut Kelas Jalan
Fungsi Kelas Muatan sumbu terberat MST (ton)
Arteri
I
II
IIIA
>10
10
8
Kolektor IIIA
IIIB 8
Sumber : TPGJAK No. 038/T/BM/1997
3. Klasifikasi menurut medan jalan
Medan jalan diklasifikasikan berdasarkan kondisi sebagian besar kemiringan
medan yang diukur tegak lurus garis kontur. Klasifikasi jalan menurut medan
jalan ini dapat dilihat dalam tabel 2.2.
Tabel 2.2 Klasifikasi Menurut Medan Jalan
No Jenis Medan Notasi Kemiringan medan
(%)
1
2
3
Datar
Perbukitan
Pegunungan
D
B
G
< 3
3 – 25
>25
Sumber : TPGJAK No. 038/T/BM/1997
4. Klasifikasi menurut wewenang pembinaan jalan
Klasifikasi jalan menurut wewenang pembinaannya sesuai PP. No. 26/1985
adalah Jalan Nasional, Jalan Kabupaten/Kotamadya, Jalan Desa dan Jalan
commit to user
2.3.
Perencanaan Geometrik Jalan Raya
Perencanaan geometrik jalan adalah perencanaan route dari suatu ruas jalan secara
lengkap, meliputi beberapa elemen yang disesuaikan dengan kelengkapan data
dan data dasar yang ada atau tersedia dari hasil survey lapangan dan telah
dianalisis, serta mengacu pada ketentuan yang berlaku.
Perencanaan geometrik secara umum menyangkut bagian-bagian dari jalan seperti
lebar, tikungan, landai dan kombinasi dari bagian-bagian jalan tersebut.
Perencanaan yang dibahas mengenai Alinemen Horisontal dan Alinemen Vertikal
jalan dengan acuan Tata Cara Perencanaan Geometrik Jalan Antar Kota (TPGJAK
No. 038/T/BM/1997)
2.3.1. Alinemen Horisontal
Alinemen Horisontal adalah proyeksi sumbu jalan pada bidang horizontal.
Alinemen horisontal disebut juga situasi jalan atau trace jalan. Bagian yang
penting pada alinemen horisontal adalah bagian tikungan, dimana terdapat gaya
sentrifugal yang seolah olah melemparkan kendaraan keluar dari lajur jalannya.
Pada perencanaan alinemen horizontal, pada umumnya akan ditemui dua bagian
jalan, yaitu bagian lurus dan bagian lengkung atau umum disebut tikungan yang
terdiri dari tiga jenis tikungan yang umum digunakan, yaitu :
• Full - Circle ( F – C )
• Spiral – Circle – Spiral ( S – C – S )
commit to user
2.3.1.1 Bagian Lurus
Panjang maksimum bagian lurus harus dapat ditempuh dalam waktu ≤ 2,5 menit
(sesuai Vr), dengan pertimbangan keselamatan pengemudi akibat dari kelelahan.
Tabel 2.3 Panjang Bagian Lurus Maksimum
Fungsi Panjang Bagian Lurus Maksimum ( m )
Datar Bukit Gunung
Arteri
Kolektor
3.000 2.500 2.000
2.000 1.750 1.500
Sumber : TPGJAK No. 038/T/BM/1997
2.3.1.2 Bagian Lengkung / Tikungan
Jari-jari Tikungan Minimum
Agar kendaraan stabil saat melalui tikungan, perlu dibuat suatu kemiringan
melintang jalan pada tikungan yang disebut dengan superelevasi (e). Pada saat
kendaraan melalui daerah superelevasi, akan terjadi gesekan arah melintang jalan
antara ban kendaraan dengan permukaan aspal yang menimbulkan gaya gesekan
melintang. Perbandingan gaya gesekan melintang dengan gaya normal disebut
koefisien gesekan melintang (f).
Rumus umum untuk penghitungan lengkung horizontal adalah :
Rmin =
) ( 127
2
f e V
+
× (1)
D = 3600
2 25
× ×
×π R ... (2)
dimana :
R = Jari-jari lengkung (m)
commit to user
Untuk menghindari terjadinya kecelakaan, maka untuk kecepatan tertentu dapat
dihitung jari-jari minimum untuk superelevasi maksimum dan koefisien gesekan
maksimum.
fmaks =
(
−0,000625×Vr)
+0,19 ... (3)Rmin =
) (
127 2
maks maks
r
f e
V
+
× ... (4)
Dmaks = 2
) (
53 , 181913
r
maks maks
V
f
e +
×
... (5)
dimana :
Rmin = Jari-jari tikungan minimum (m)
VR = Kecepatan rencana (km/jam)
emaks = Superelevasi maksimum (%)
fmaks = Koefisien gesekan melintang maksimum
Dmaks = Derajat lengkung maksimum
Untuk perhitungan perencanaan, digunakan emaks = 10 % sesuai dengan tabel
panjang jari-jari minimum.
Tabel 2.4 Panjang Jari-jari Minimum (dibulatkan) untuk emaks = 10%
Vr (km/jam) 120 100 90 80 60 50 40 30 20
Rmin(m) 600 370 280 210 110 80 50 30 15
Sumber : TPGJAK No. 038/T/BM/1997
Untuk kecepatan rencana < 80 km/jam berlaku fmaks = - 0,00065 VR + 0,192
Untuk kecepatan rencana 80 – 120 km/jam berlaku fmaks = - 0,00125 VR + 0,24
Lengkung Peralihan (Ls)
Lengkung peralihan adalah lengkung yang disisipkan di antara bagian lurus jalan
commit to user
perubahan alinemen jalan dari bentuk lurus (R tak terhingga) sampai bagian
lengkung jalan berjari-jari tetap R sehingga gaya sentrifugal yang bekerja pada
kendaraan saat berjalan di tikungan berubah secara berangsur-angsur, baik ketika
kendaraan mendekati tikungan maupun meninggalkan tikungan.
Dengan adanya lengkung peralihan, maka tikungan menggunakan jenis S-C-S.
Panjang lengkung peralihan (Ls), menurut Tata Cara Perencanaan Geometrik
Jalan Antar Kota, 1997, diambil nilai yang terbesar dari tiga persamaan
di bawah ini :
1. Berdasarkan waktu tempuh maksimum (3 detik), untuk melintasi lengkung
peralihan, maka panjang lengkung
Ls =
6 , 3
r
V
x T ... (6)
2. Berdasarkan antisipasi gaya sentrifugal, digunakan rumus Modifikasi Shortt
Ls = 0,022 x
⎟⎟⎠ ⎞ ⎜⎜⎝
⎛ ×C Rc
Vr3
- 2,727 x
⎟⎟⎠ ⎞ ⎜⎜⎝
⎛ ×
C e
Vr tjd
... (7)
3. Berdasarkan tingkat pencapaian perubahan kelandaian
Ls =
e n m
r e e
× −
6 , 3
) (
xVr ... (8)
4. Sedangkan Bedasar Rumus Bina Marga
Ls = W ×(en+etjd)×m
2 ... (9)
dimana :
T = Waktu tempuh = 3 detik
Rc = Jari-jari busur lingkaran (m)
C = Perubahan percepatan 0,3-1,0 disarankan 0,4 m/det2
tjd
commit to user
em = Superelevasi maksimum
en = Superelevasi normal
re = Tingkat pencapaian perubahan kelandaian melintang jalan, sebagai berikut :
Untuk Vr≤ 70 km/jam, maka remak = 0,035 m/m/det
Untuk Vr ≥ 80 km/jam, maka remak = 0,025 m/m/det
(Sumber Tata Cara Perencaan Geometrik Jalan Antar Kota 1997 Hal.28)
Jenis Tikungan
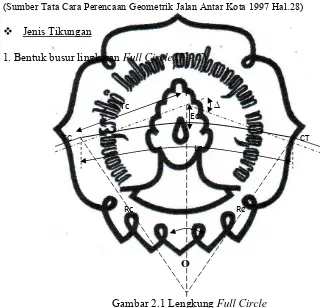
[image:30.612.130.450.209.517.2]1. Bentuk busur lingkaran Full Circle (F - C)
Gambar 2.1 Lengkung Full Circle
Keterangan Gambar :
∆ = Sudut Tikungan
O = Titik Pusat Tikungan
TC = Tangen toCircle
CT = Circle to Tangen
Rc = Jari-jari Lingkungan
Tc
TC CT
∆
∆
Rc Rc
Ec
Lc PI
commit to user
Tc = Panjang tangen (jarak dari TC ke PI atau PI ke TC)
Lc = Panjang Busur Lingkaran
Ec = Jarak Luar dari PI ke busur lingkaran
F-C (Full Circle) adalah jenis tikungan yang hanya terdiri dari bagian suatu
lingkaran saja. Tikungan F- C hanya digunakan untuk R (jari-jari tikungan) yang
besar agar tidak terjadi patahan, karena dengan R kecil maka diperlukan
[image:31.612.132.509.216.476.2]superelevasi yang besar.
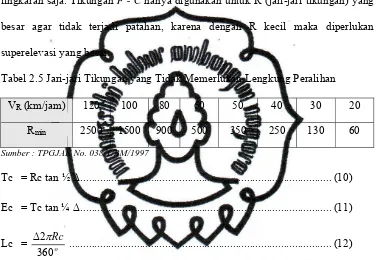
Tabel 2.5 Jari-jari Tikungan yang Tidak Memerlukan Lengkung Peralihan
VR(km/jam) 120 100 80 60 50 40 30 20
Rmin 2500 1500 900 500 350 250 130 60
Sumber : TPGJAK No. 038/T/BM/1997
Tc = Rc tan ½ ∆ ... (10)
Ec = Tc tan ¼ ∆ ... (11)
Lc = Rco
360
2π
commit to user
2
K
X
Y
L
L
T
T
S
E
θ
R
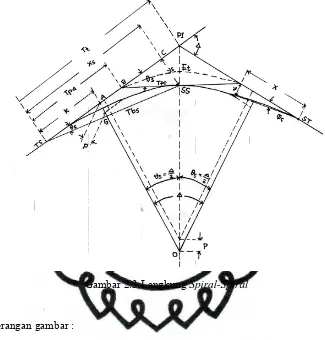
2. Tikungan
Keterangan
Xs = Ab
Ys = Jar
Ls = Pan
Lc = Pan
Ts = Pan
TS = Tit
SC = Tit
Es = Jar
θs = Su
Rr = Jar
Spiral-Circ
Gam
Gambar :
bsis titik SC
rak tegak lur
njang dari ti
njang busur
njang tangen
tik dari tange
tik dari spira
rak dari PI k
udut lengkun
ri-jari lingka
cle-Spiral (
S-mbar 2.2 Len
pada garis ta
rus ketitik SC
itik TS ke SC
lingkaran (p
n dari titik P
en ke spiral
al ke lingkara
ke busur lingk
ng spiral
aran
-C-S)
ngkung Spira
angen, jarak
C pada lengk
C atau CS ke
panjang dari
PI ke titik TS
an
karan
al-Circle-Spi
k dari titik ST
kung
e ST
titik SC ke C
S atau ke titik
iral
T ke SC
CS)
commit to user
p = Pergeseran tangen terhadap spiral
k = Absis dari p pada garis tangen spiral
Rumus-rumus yang digunakan :
- Xs = Ls x
⎟⎟⎠ ⎞ ⎜⎜⎝
⎛
×
− 2
2
40 1
Rr Ls
... (13)
- Ys =
Rr Ls
×
6 2
... (14)
- θs =
π
90 x
Rr Ls
………....(15)
- P = Ys – Rr x ( 1 – cos θs ) ... (16)
- K = Ls – 2
3
40 Rr
Ls
× - (Rr x sin θs) ... (17)
- Es =
(
Rr+ p)
× ∆PI −Rr2 1
sec ... (18)
- Ts = ( Rr + p ) x tan ½ ∆PI + K ... (19)
- Lc =
(
∆PI− θs)
×π×Rr180 2
... (20)
- Ltot = Lc+
(
2×Ls)
... (21)Jika diperoleh Lc < 25 m, maka sebaiknya tidak digunakan bentuk S–C–S tetapi
digunakan lengkung S–S, yaitu lengkung yang terdiri dari dua lengkung peralihan.
Jika P yang dihitung dengan rumus di bawah, maka ketentuan tikungan yang
digunakan bentuk S-C-S.
P =
Rr Ls
24 2
< 0,25 m ... (22)
Untuk Ls = 1,0 m maka p = p’ dan k = k’
commit to user
3
T
K
T
X
L
T
E
θ
R
P
k
3. Tikungan
Tikungan ya
Keterangan
Tt = Pan
Xs = Ab
Ls = Pan
TS = Tit
Et = Jar
θs = Su
Rr = Jar
P = Per
k = Ab
Spiral-Spira
ang disertai l
G
gambar :
njang tangen
bsis titik SS p
njang dari ti
tik dari tange
rak dari PI k
udut lengkun
ri-jari lingka
rgeseran tan
bsis dari P pa
al (S-S)
[image:34.612.153.478.133.473.2]lengkung pe
Gambar 2.3 L
n dari titik P
pada garis ta
itik TS ke SS
en ke spiral
ke busur lingk
ng spiral
aran
ngen terhadap
ada garis tan
ralihan.
Lengkung Sp
PI ke titik TS
angen, jarak
S atau SS ke
karan
p spiral
ngen spiral
piral-Spiral
S atau ke titik
dari titik TS
ST
k ST
commit to user
Kemiringan normal padabagian jalan lurusKanan = ka - Kiri = ki -
e = - 2% h = beda tinggi e = - 2%
As Jalan
Untuk bentuk spiral-spiral berlaku rumus sebagai berikut :
1. θs = ½∆PI ... (23)
2. Ls =
90
Rr s×π×
θ ... (24)
3. Xs = Ls x
⎟⎟⎠ ⎞ ⎜⎜⎝
⎛
×
− 2
2
40 1
Rr Ls
... (25)
4. Ys =
Rr Ls
×
6 2
... (26)
5. P = Ys –
[
Rr×(
1−cosθs)
]
... (27)6. K = Ls –
⎟⎟⎠ ⎞ ⎜⎜⎝
⎛
× 2
3
40 Rr Ls
- (Rr x sin θs) ... (28)
7. Tt = ( Rr + p ) x tan ½ ∆PI + K ... (29)
8. Et =
(
)
(
)
RrPI P Rr
− ⎥ ⎥ ⎦ ⎤ ⎢
⎢ ⎣ ⎡
∆ × +
2 1
cos ... (30)
9. Ltot = 2 x Ls ... (31)
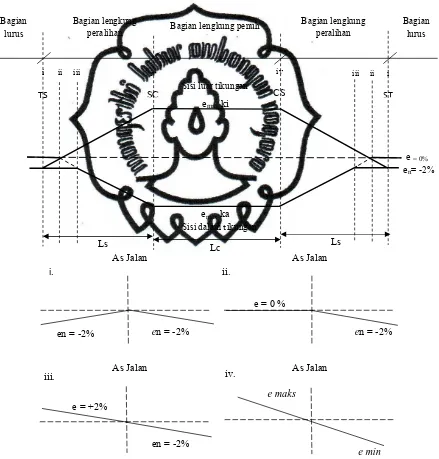
2.3.1.3 Diagram Superelevasi
Superelevasi adalah kemiringan melintang jalan pada daerah tikungan. Untuk
bagian jalan lurus, jalan mempunyai kemiringan melintang yang biasa disebut
lereng normal yaitu diambil minimum 2 % baik sebelah kiri maupun sebelah
kanan AS jalan. Hal ini dipergunakan untuk sistem drainase aktif. Harga elevasi
(e) yang menyebabkan kenaikan elevasi terhadap sumbu jalan di beri tanda (+)
dan yang menyebabkan penurunan elevasi terhadap jalan di beri tanda ( - ).
commit to user
Kemiringan melintang pada tikungan belok kanan As Jalan
Kanan = ka - Kiri = ki +
emin h = beda tinggi emaks
Kemiringan melintang pada tikungan belok kiri As Jalan
Kanan = ka +
Kiri = ki -
emaks
h = beda tinggi emin
Sedangkan yang dimaksud dengan diagram superelevasi adalah suatu cara untuk
menggambarkan pencapaian superelevasi dari lereng normal ke kemiringan
melintang (superelevasi) penuh, sehingga dengan mempergunakan diagram
superelevasi dapat ditentukan bentuk penampang melintang pada setiap titik di
commit to user
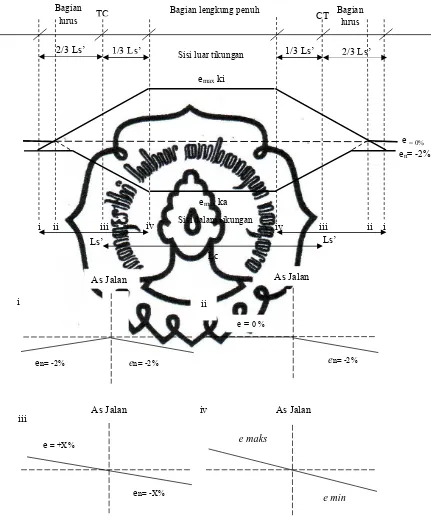
Sisi dalamtikungan Bagian lengkung penuh Bagian
lurus
Bagian lurus
Sisi luar tikungan
a) Diagram Superelevasi pada Full-Circle
[image:37.612.118.549.118.634.2]
Gambar 2.4 Diagram Superelevasi Full-Circle
en= -2% As Jalan
As Jalan As Jalan
As Jalan
en= -2% en= -2%
e = 0 %
en= -X% e = +X%
e min i
iv iii
ii
e maks
TC
emax ki
Lc Ls’
e = 0%
en= -2%
CT
Ls’
1/3 Ls’
2/3 Ls’ 1/3 Ls’
2/3 Ls’
i
ii
iii iv iv
iii
commit to user
Sisi dalamtikungan Bagian lengkung penuh Bagian
lurus
Bagian lurus
Sisi luar tikungan Bagian lengkung
peralihan
Bagian lengkung peralihan
Ls pada tikungan Full-Circle ini sebagai Ls bayangan yaitu untuk perubahan
kemiringan secara berangsur-angsur dari kemiringan normal ke maksimum atau
minimum.
(
en etjd)
m W
Ls= × × +
2 ... (32)
b) Diagram Superelevasi pada Spiral-Cricle-Spiral
As Jalan As Jalan
As Jalan As Jalan
[image:38.612.114.553.219.678.2]
Gambar 2.5 Diagram Superelevasi Spiral-Circle-Spiral
i
TS
ii iii iv
SC
emax ki
Lc Ls
e = 0%
en= -2%
iv
CS
iii ii i
ST
Ls
en = -2%
en = -2% en = -2%
e = 0 %
i. ii.
en = -2% e = +2%
e min e maks
iii. iv.
commit to user
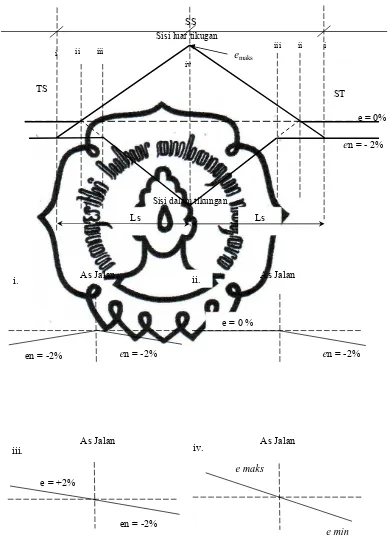
c) Diagram Superelevasi pada Spiral-Spiral
SS
As Jalan As Jalan
As Jalan As Jalan
[image:39.612.146.537.121.660.2]
Gambar 2.6 Diagram Superelevasi Spiral-Spiral
Ls TS
e = 0%
en = - 2% ST
emaks
Ls i ii iii
iii i ii
iv
Sisi dalam tikungan Sisi luar tikugan
en = -2%
en = -2% en = -2%
e = 0 %
en = -2% e = +2%
e min e maks
iii. iv.
commit to user
2.3.1.4 Jarak Pandang
Jarak pandang adalah suatu jarak yang diperlukan oleh seorang pengemudi pada
saat mengemudi sedemikian rupa sehingga jika pengemudi melihat suatu halangan
yang membahayakan, pengemudi dapat melakukan sesuatu (antisipasi) untuk
menghindari bahaya tersebut dengan aman. Jarak pandang dibedakan menjadi
dua, yaitu jarak pandang henti (Jh) dan jarak pandang menyiap/mendahului (Jd).
1) Jarak Pandang Henti (Jh)
) Jarak minimum
Jh adalah jarak minimum yang diperlukan oleh setiap pengemudi untuk
menghentikan kendaraannya dengan aman begitu melihat adanya halangan
didepan. Setiap titik disepanjang jalan harus memenuhi ketentuan Jh.
) Asumsi tinggi
Jh diukur berdasarkan asumsi bahwa tinggi mata pengemudi adalah 105 cm
dan tinggi halangan 15 cm, yang diukur dari permukaan jalan.
) Rumus yang digunakan.
Jh dalam satuan meter, dapat dihitung dengan rumus :
⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
× ×
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎟ ⎠ ⎞ ⎜
⎝
⎛ ×
=
2
2 6 , 3 6
,
3 g fp
Vr
T Vr Jh
... (33)
dimana : Vr = Kecepatan rencana (km/jam)
T = Waktu tanggap, ditetapkan 2.5 detik
commit to user
fp = Koefisien gesek memanjang antara ban kendaraan dengan
perkerasan jalan aspal, ditetapkan 0.35 – 0.55 (menurut
TPGJAK 1997)
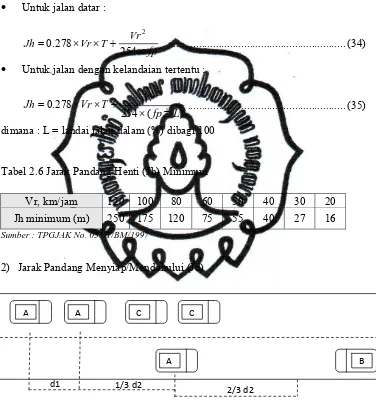
Persamaan (33) dapat disederhanakan menjadi:
• Untuk jalan datar :
fp Vr T
Vr Jh
× + × × =
254 278
. 0
2
... (34)
• Untuk jalan dengan kelandaian tertentu :
) ( 254 278
. 0
2
L fp Vr T
Vr Jh
± × + × ×
= ... (35)
[image:41.612.132.508.184.591.2]dimana : L = landai jalan dalam (%) dibagi 100
Tabel 2.6 Jarak Pandang Henti (Jh) Minimum
Vr, km/jam 120 100 80 60 50 40 30 20
Jh minimum (m) 250 175 120 75 55 40 27 16
Sumber : TPGJAK No. 038/T/BM/1997
2) Jarak Pandang Menyiap/Mendahului (Jd)
Ket :
A = Kendaraan yang mendahului
B = Kendaraan yang berlawanan arah
C = Kendaraan yang didahului kendaraan A
A A C C
A B
d1 1/3 d2
commit to user
)Jarak adalah jarak yang memungkinkan suatu kendaraan mendahului kendaraan
lain didepannya dengan aman sampai kendaraan tersebut kembali kelajur
semula.
)Asumsi tinggi
Jh diukur berdasarkan asumsi bahwa tinggi mata pengemudi adalah 105 cm
dan tinggi halangan 105 cm.
)Rumus yang digunakan.
Jd, dalam satuan meter ditentukan sebagai berikut :
Jd = d1+d2+d3+d4
dimana :
d1 = Jarak yang ditempuh selama waktu tanggap (m).
d2 = Jarak yang ditempuh selama mendahului sampai dengan kembali ke
lajur semula (m).
d3 = Jarak antara kendaraan yang mendahului dengan kendaraan yang
datang dari arah berlawanan setelah proses mendahului selesai (m).
d4 = Jarak yang ditempuh oleh kendaraan yang datang dari arah berlawanan.
Rumus yang digunakan :
⎟ ⎠ ⎞ ⎜
⎝
⎛ − + ×
× × =
2 278
,
0 1
1 1
T a m Vr T
d ... (36)
2
2 0,278 Vr T
d = × × ... (37)
m antara
d3 = 30−100 ... (38)
Vr, km/jam 60-65 65-80 80-95 95-110
d3 (m) 30 55 75 90
2
4 23 d
commit to user
garis pandang E
Lajur Dalam Lajur
Luar
Jh
Penghalang Pandangan
R R' R
Lt
dimana :
T1 = Waktu dalam (detik), ∞ 2.12 + 0.026 x Vr
T2 = Waktu kendaraan berada di jalur lawan, (detik) ∞ 6.56+0.048xVr
A = Percepatan rata-rata km/jm/dtk, (km/jm/dtk), ∞ 2.052+0.0036xVr
m = Perbedaan kecepatan dari kendaraan yang menyiap dan kendaraan yang
[image:43.612.132.508.212.681.2]disiap, (biasanya diambil 10-15 km/jam)
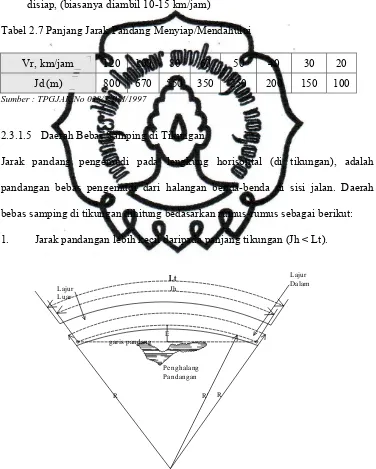
Tabel 2.7 Panjang Jarak Pandang Menyiap/Mendahului
Vr, km/jam 120 100 80 60 50 40 30 20
Jd(m) 800 670 550 350 250 200 150 100
Sumber : TPGJAK No 038/T/BM/1997
2.3.1.5 Daerah Bebas Samping di Tikungan
Jarak pandang pengemudi pada lengkung horisontal (di tikungan), adalah
pandangan bebas pengemudi dari halangan benda-benda di sisi jalan. Daerah
bebas samping di tikungan dihitung bedasarkan rumus-rumus sebagai berikut:
1. Jarak pandangan lebih kecil daripada panjang tikungan (Jh < Lt).
commit to user
Keterangan Gambar :
Jh = Jarak pandang henti (m)
Lt = Panjang tikungan (m)
E = Daerah kebebasan samping (m)
R = Jari-jari lingkaran (m)
Maka: E = ⎟
⎠ ⎞ ⎜
⎝
⎛ − ×
×
' 65 , 28 cos 1 '
R Jh
R ... (40)
2. Jarak pandangan lebih besar dari panjang tikungan (Jh > Lt)
Gambar 2.8 Jarak Pandangan pada Lengkung Horizontal, untuk Jh > Lt
E = R’ ⎟
⎠ ⎞ × ×
⎜ ⎝ ⎛ − + ⎟ ⎠ ⎞ ⎜
⎝
⎛ − ×
' 65 , 28 sin 2
' 65 , 28 cos 1
R Jh Lt
Jh R
Jh
... (41)
Keterangan Gambar :
Jh = Jarak pandang henti (m)
Lt = Panjang lengkung total (m)
PENGHALANG PANDANGAN
R R'
R Lt
LAJUR DALAM
Jh Lt
GARIS PANDANG E
LAJUR LUAR
commit to user
2,1m 7,6 m 2,6 m
A P
c/2
c/2 b'
Td
R
(
m
et
er
)
b b''
R = Jari-jari tikungan (m)
R’ = Jari-jari sumbu lajur dalam (m)
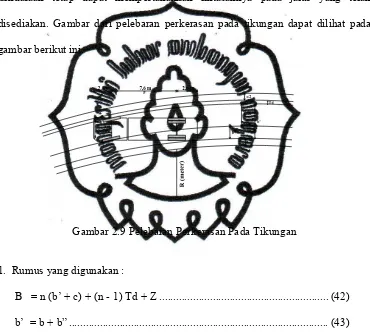
2.3.1.6 Pelebaran Perkerasan
Pelebaran perkerasan dilakukan pada tikungan-tikungan yang tajam, agar
kendaraan tetap dapat mempertahankan lintasannya pada jalur yang telah
[image:45.612.135.505.222.556.2]disediakan. Gambar dari pelebaran perkerasan pada tikungan dapat dilihat pada
gambar berikut ini.
Gambar 2.9 Pelebaran Perkerasan Pada Tikungan
1. Rumus yang digunakan :
B = n (b’ + c) + (n - 1) Td + Z ... (42)
b’ = b + b” ... (43)
b” = Rr- 2 2
p
Rr − ... (44)
Td = Rr2 +A
(
2p+A)
−Rr ... (45)Z = 0,105
Rr Vr
... (46)
commit to user
Keterangan:
B = Lebar perkerasan pada tikungan
n = Jumlah jalur lalu lintas
b = Lebar lintasan truk pada jalur lurus
b’ = Lebar lintasan truk pada tikungan
p = Jarak As roda depan dengan roda belakang truk
A = Tonjolan depan sampai bumper
W = Lebar perkerasan
Td = Lebar melintang akibat tonjolan depan
Z = Lebar tambahan akibat kelelahan pengamudi
c = Kebebasan samping
ε = Pelebaran perkerasan
Rr = Jari-jari rencana
2.3.1.7 Kontrol Over Lapping
Pada setiap tikungan yang sudah direncanakan, maka jangan sampai terjadi Over
Lapping. Karena kalau hal ini terjadi maka tikungan tersebut menjadi tidak aman
untuk digunakan sesuai kecepatan rencana. Syarat supaya tidak terjadi Over
Lapping : aI > 3V
dimana :
aI = Daerah tangen (meter)
commit to user
Contoh :
Gambar 2.10. Kontrol Over Lapping
Vr = 120 km/jam = 33,333 m/det.
Syarat over lapping a’ ≥ a, dimana a = 3 x Vr
= 3 x 33,33 = 100 m
bila aI d1 – Tc ≥ 100 m aman
aII d2 – Tc – Ts1 ≥ 100 m aman
aIII d3 – Ts1 – Ts2≥ 100 m aman
aIV d4 – Ts2≥ 100 m aman
2.3.2. Alinemen Vertikal
Alinemen vertikal adalah perencanaan elevasi sumbu jalan pada setiap titik yang
ditinjau, berupa profil memanjang. Pada perencanaan alinemen vertikal terdapat
kelandaian positif (Tanjakan) dan kelandaian negatif (Turunan), sehingga
a3
d1 d2
d3
d4 ST CS
SC TS
ST TS
TC
CT
PI‐1 PI‐2
PI‐3
A
B
a1
a2
commit to user
kombinasinya berupa lengkung cembung dan lengkung cekung. Disamping kedua
lengkung tersebut terdapat pula kelandaian = 0 (Datar).
)Bagian – bagian Lengkung Vertikal
1) Lengkung vertikal cembung
Adalah lengkung dimana titik perpotongan antara kedua tangent berada di atas
permukaan jalan
Gambar 2.11 Lengkung Vertikal Cembung
2). Lengkung vertikal cekung
Adalah lengkung dimana titik perpotongan antara kedua tangent berada di
bawah permukaan tanah.
Gambar 2.12 Lengkung Vertikal Cekung
a e
PVI
Ev
b d
½ Lv ½ Lv
Lv c
a e
PVI Ev
b d
½ Lv ½ Lv
Lv
c
g1 g2
commit to user
Keterangan Gambar :
a = titik awal lengkung
c = titik tengah lengkung
e = titik akhir lengkung
PVI = titik perpotongan kelandaian g1 dan g2
g = kemiringan tg, (+) = naik dan (-) = turun
∆ = perbedanan aljabar landai (g2 – g1)
Ev = pergeseran vertikal titik tengah busur lingkaran meter
Lv = panjang lengkung vertikal.
V = panjang lengkung
)Rumus-rumus yang Digunakan untuk Alinemen Vertikal
1. ×100%
− − =
awal Sta akhir Sta
awal elevasi akhir
elevasi
g ………...(48)
2. A = g2 – g1 ... (49)
3.
800
Lv A
Ev= × ... (50)
4.
2
200 4 1
Lv Lv A
y
× ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ×
= ... (51)
5. Panjang Lengkung Vertikal (PLV)
a) Berdasarkan syarat keluwesan
V
Lv =0,6× ... (52)
b) Berdasarkan syarat drainase
A
Lv =40× ... (53)
c) Berdasarkan syarat kenyamanan
t V
commit to user
d) Berdasarkan syarat goncangan
⎟⎟⎠ ⎞ ⎜⎜⎝
⎛ × =
360
2
A V
Lv ... (55)
)Hal-hal yang Perlu Diperhatikan dalam Perencanaan Alinemen Vertikal
1) Kelandaian maksimum.
Kelandaian maksimum didasarkan pada kecepatan truk yang bermuatan penuh
mampu bergerak dengan kecepatan tidak kurang dari separuh kecepatan semula
tanpa harus menggunakan gigi rendah.
Tabel 2.8 Kelandaian Maksimum yang Diijinkan
Landai maksimum % 3 3 4 5 8 9 10 10
VR (km/jam) 120 110 100 80 60 50 40 <40
Sumber : TPGJAK No. 038/T/BM/1997
2) Kelandaian Minimum
Pada jalan yang menggunakan kerb pada tepi perkerasannya, perlu dibuat
kelandaian minimum 0,5 % untuk keperluan kemiringan saluran samping, karena
kemiringan jalan dengan kerb hanya cukup untuk mengalirkan air ke samping.
3) Panjang Kritis suatu Kelandaian
Panjang kritis yaitu panjang landai maksimum yang harus disediakan agar
kendaran dapat mempertahankan kecepatannya sedemikian sehingga penurunan
kecepatan tidak lebih dari separoh Vr. Lama perjalanan tersebut ditetapkan tidak
commit to user
Tabel 2.9 Panjang Kritis (m)
Kecepatan pada awal tanjakan (km/jam)
Kelandaian (%)
4 5 6 7 8 9 10
80 630 460 360 270 230 230 200
60 320 210 160 120 110 90 80
Sumber : TPGJAK No 038/T/BM/1997
2.4. Perencanaan Tebal Perkerasan Lentur
Perencanaan konstruksi lapisan perkerasan lentur disini untuk jalan baru dengan
Metoda Analisa Komponen, yaitu dengan metoda analisa komponen SKBI –
2.3.26. 1987.
Surface course
Base course
Subbase course
Subgrade
Gambar 2.13 Susunan Lapis Konstruksi Perkerasan Lentur
Adapun untuk perhitungannya perlu pemahaman istilah-istilah sebagai berikut :
2.4.1 Lalu lintas
1) Lalu Lintas Harian Rata-rata (LHR)
Lalu lintas harian rata-rata (LHR) setiap jenis kendaraan ditentukan pada awal
umur rencana, yang dihitung untuk dua arah pada jalan tanpa median atau
commit to user
- Lalu lintas harian rata-rata permulaan (LHRP)
(
)
11
1 n
P LHRs i
LHR = × + ... (56)
- Lalu lintas harian rata-rata akhir (LHRA)
(
)
22
1 n
P
A LHR i
LHR = × + ... (57)
2) Rumus-rumus Lintas Ekivalen
- Lintas Ekivalen Permulaan (LEP)
j j n
j
p C E
LHR
LEP=
∑
× ×=1
... (58)
- Lintas Ekivalen Akhir (LEA)
( )
J JUR n
j
p i C E
LHR
LEA=
∑
× + × ×=
1
1
... (59)
- Lintas Ekivalen Tengah (LET)
(
LEP LEA)
LET = Σ +Σ
2 1
... (60)
- Lintas Ekivalen Rencana (LER)
10
UR LET
LER= × ... (61)
dimana:
i1 = Pertumbuhan lalu lintas masa konstruksi
i2 = Pertumbuhan lulu lintas masa layanan
J = jenis kendaraan
n1 = masa konstruksi
n2 = umur rencana
C = koefisien distribusi kendaraan
commit to user
2.4.2 Angka ekivalen (E) Beban Sumbu KendaraanAngka ekuivalen (E) masing-masing golongan beban umum (setiap kendaraan)
ditentukan menurut rumus daftar sebagai berikut:
-4
8160
. ⎟
⎠ ⎞ ⎜
⎝ ⎛
= bebansatusumbutunggal dlmkg
Tunggal Sumbu
E ... (62)
-4
8160 086
, 0
. ⎟
⎠ ⎞ ⎜
⎝ ⎛ ×
= bebansatusumbu gandadlmkg
Ganda Sumbu
E ... (63)
2.4.3 Daya Dukung Tanah Dasar (DDT dan CBR)
Daya dukung tanah dasar (DDT) ditetapkan berdasarkan grafik korelasi DDT dan
CBR.
2.4.4 Faktor Regional (FR)
Faktor regional bisa juga disebut factor koreksi sehubungan dengan perbedaan
kondisi tertentu. Kondisi-kondisi yang dimaksud antara lain keadaan lapangan dan
iklim yang dapat mempengaruhi keadaan pembebanan daya dukung tanah dan
perkerasan. Dengan demikian dalam penentuan tebal perkerasan ini Faktor
Regional hanya dipengaruhi bentuk alinemen ( kelandaian dan tikungan).
Tabel 2.10 Faktor Regional (FR)
Kelandaian 1
(<6%)
Kelandaian II (6–10%)
Kelandaian III (>10%)
% kendaraan berat % kendaraan berat % kendaraan berat
≤ 30% >30% ≤ 30% >30% ≤ 30% >30%
Iklim I
< 900 mm/tahun
0,5 1,0 –
1,5 1,0
1,5 –
2,0 1,5 2,0 – 2,5
Iklim II
≥ 900
mm/tahun
1,5 2,0 –
2,5 2,0
2,5 –
3,0 2,5 3,0 – 3,5
commit to user
2.4.5 Koefisien Distribusi KendaraanKoefisien distribusi kendaraan (C) untuk kendaraan ringan dan berat yang lewat
pada jalur rencana ditentukan menurut daftar di bawah ini:
Tabel 2.11 Koefisien Distribusi Kendaraan
Jumlah lajur Kendaraan ringan *) Kendaraan berat **)
1 arah 2 arah 1 arah 2 arah
1 lajur
2 lajur
3 lajur
4 lajur
5 lajur
6 lajur
1,00
0,60
0,40
-
-
-
1,00
0,50
0,40
0,30
0,25
0,20
1,00
0,70
0,50
-
-
-
1,00
0,50
0,475
0,45
0,425
0,40
*) berat total < 5 ton, misalnya: mobil penumpang, pick up, mobil hantaran. **) berat total ≥ 5 ton, misalnya: bus, truk, traktor, semi trailer, trailer.
Sumber : Petunjuk Perencanaan Tebal Perkerasan Lentur Jalan Raya Dengan Metode Analisa Komponen SKBI 2.3.26.1987
2.4.6 Koefisien Kekuatan Relatif (a)
Koefisien kekuatan relatif (a) masing-masing bahan dan kegunaan sebagai lapis
permukaan pondasi, bawah, ditentukan secara korelasi sesuai nilai Marshall Test
(untuk bahan dengan aspal), kuat tekan untuk (bahan yang didistabilisasikan
dengan semen atau kapur) atau CBR (untuk bahan lapis pondasi atau pondasi
commit to user
Tabel 2.12 Koefisien Kekuatan Relatif
Koefisien Kekuatan Relatif
Kekuatan Bahan
Jenis Bahan
a1 a2 a3 Ms
(kg)
Kt
kg/cm2
CBR %
0,40 744
LASTON
0,35 590
0,32 454
0,30 340
0,35 744
LASBUTAG
0,31 590
0,28 454
0,26 340
0,30 340 HRA
0,26 340 Aspal Macadam
0,25 LAPEN (mekanis)
0,20 LAPEN (manual)
0,28 590
LASTON ATAS 0,26 454
0,24 340
0,23 LAPEN (mekanis)
0,19 LAPEN (manual)
0,15 22 Stab. Tanah dengan semen 0,13 18
0,15 22 Stab. Tanah dengan kapur 0,13 18
0,14 100 Batu pecah (kelas A)
0,13 80 Batu pecah (kelas B)
0,12 60 Batu pecah (kelas C)
0,13 70 Sirtu/pitrun (kelas A)
0,12 50 Sirtu/pitrun (kelas B)
0,11 30 Sirtu/pitrun (kelas C)
0,10 20 Tanah / lempung
kepasiran
commit to user
2.4.7 Analisa Komponen PerkerasanPenghitungan ini didistribusikan pada kekuatan relatif masing-masing lapisan
perkerasan jangka tertentu (umur rencana) dimana penentuan tebal perkerasan
dinyatakan oleh Indeks Tebal Perkerasan (ITP) dengan rumus:
3 3 2 2 1
1D a D a D
a
ITP= + + ... (64)
dimana :
a1, a2, a3 : Koefisien relative bahan perkerasan ( SKBI 2.3.26 1987 )
D1, D2, D3 : Tebal masing – masing lapis permukaan
2.5.
Rencana Anggaran Biaya (RAB)
Untuk menentukan besarnya biaya yang diperlukan terlebih dahulu harus
diketahui volume dari pekerjaan yang direncanakan. Pada umumnya pembuat
jalan tidak lepas dari masalah galian maupun timbunan. Besarnya galian dan
timbunan yang akan dibuat dapat dilihat pada gambar long profile. Sedangkan
volume galian dapat dilihat melalui gambar Cross Section. Selain mencari volume
galian dan timbunan juga diperlukan untuk mencari volume dari pekerjaan lainnya
yaitu:
2.5.1 Volume Pekerjaan
a. Volume pekerjaan tanah
- Pembersihan semak dan pengupasan tanah
- Persiapan badan jalan
commit to user
b. Volume pekerjaan drainase
- Galian saluran
- Pasangan batu dengan mortar
- Siaran
c. Volume pekerjaan dinding penahan
- Galian pondasi
- Pasangan batu dengan mortar
- Plesteran
- Siaran
d. Volume pekerjaan perkerasan
− Lapis pondasi bawah (sub base course)
− Lapis pondasi atas (base course)
− Prime Coat
− Lapis Laston
e. Volume pekerjaan pelengkap
- Pemasangan rambu-rambu
- Pengecatan marka jalan
- Pemasangan patok kilometer
- Penanaman pohon ( stabilisasi tanaman ) dan penerangan
2.5.2 Analisa Harga Satuan
Analisa harga satuan diambil dari Harga Satuan Dasar Upah Dan Bahan Serta
commit to user
2.5.3 Kurva SDari hasil analisis perhitungan waktu pelaksanaan, analisis harga satuan pekerjaan
dan perhitungan bobot pekerjaan, maka dapat dibuat Rencana Anggaran Biaya
(RAB) dan Time Schedule pelaksanaan proyek dalam bentuk Bar Chard dan
Kurva S. Kurva S sendiri dibuat dengan cara membagi masing-masing bobot
pekerjaan dalam (Rp) dengan jumlah bobot pekerjaan keseluruhan dikali 100%
sehingga hasilnya adalah dalam (%), kemudian bobot pekerjaan (%) tersebut
dibagi dengan lamanya waktu pelaksanaan tiap jenis pekerjaan setelah itu hasil
perhitungan dimasukkan dalam table time schedule. Dari tabel tersebut dapat
diketahui jumlah (%) dan % komulatif tiap minggunya, yang selanjutnya
commit to user
40
BAB III
PERENCANAAN JALAN
3.1.
Penetapan Trace Jalan
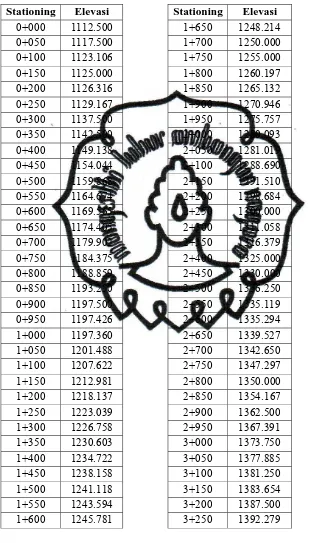
3.1.1 Gambar Perbesaran Peta
Peta topografi skala 1:25.000 dilakukan perbesaran pada daerah yang akan dibuat
trace jalan menjadi 1:10.000 dan diperbesar lagi menjadi 1:5.000, trace digambar
dengan memperhatikan kontur tanah yang ada.
3.1.2 Penghitungan Trace Jalan
Dari trace jalan (skala 1:10.000) dilakukan penghitungan-penghitungan azimuth,
commit to user
3.1.3 Penghitungan Azimuth :Diketahui koordinat :
A = ( 0 ; 0 )
PI – 1 = ( 235 ; 270 )
PI – 2 = ( 835 ; 10 )
PI – 3 = ( 1280 ; 620 )
PI – 4 = ( 1730 ; 375 )
PI – 5 = ( 2005 ; 730 )
PI – 6 = ( 2245 ; 285 )
PI – 7 = ( 2450 ; 685 )
B = ( 2860 ; -20 )
commit to user
" 57 33 118 180 620 375 1280 1730 180 ' 0 0 0 3 4 3 4 4 3 = + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = + ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ − − = − ArcTg Y Y X X ArcTg α " 08 , 47 45 37 375 730 1730 2005 ' 0 4 5 4 5 5 4 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ − − = − ArcTg Y Y X X ArcTg α " 1 , 39 39 151 180 730 285 2005 2245 180 ' 0 0 0 5 6 5 6 6 5 = + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = + ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ − − = − ArcTg Y Y X X ArcTg α " 5 , 6 8 27 285 685 2245 2450 ' 0 6 7 6 7 7 6 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ − − = − ArcTg Y Y X X ArcTg α( )
" 99 49 149 180 685 20 2450 2860 180 ' 0 0 0 7 7 7 = + ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ − − − = + ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ − − = − ArcTg Y Y X X ArcTg B B B α3.1.4 Penghitungan Sudut PI
'' ' 0 ' 0 ' 0 1 2 1 1 96 , 35 23 72 " 24 , 7 2 41 " 2 , 43 25 113 = − = − =
commit to user
" 39 , 3 19 77 " 81 , 39 6 36 " 2 , 43 25 113 ' 0 ' 0 ' 0 3 2 2 1 2 = − = − = ∆ α− α − " 19 , 17 27 82 " 81 , 39 6 36 " 57 33 118 ' 0 ' 0 ' 0 3 2 4 3 3 = − = − = ∆ α − α − " 92 , 9 48 80 " 08 , 47 45 37 " 57 33 118 ' 0 ' 0 ' 0 5 4 4 3 4 = − = − = ∆ α − α − " 52 53 113 " 08 , 47 45 37 " 1 , 39 39 151 ' 0 ' 0 ' 0 5 4 6 5 5 = − = − = ∆ α − α − " 6 , 32 31 124 " 5 , 6 8 27 " 1 , 39 39 151 ' 0 ' 0 ' 0 7 6 6 5 6 = − = − = ∆ α − α − " 5 , 32 42 122 " 5 , 6 8 27 " 99 49 149 ' 0 ' 0 ' 0 7 6 7 7 = − = − =∆ α −B α −
3.1.5 Penghitungan Jarak Antar PI
a. Menggunakan rumus Phytagoras
m
Y Y X
X
dA A A