25
Disain Robot Pembersih Lantai untuk
Pemerataan Beban Kerja Cleaning Service
Donny Montreano
1, Sigit Pradana
21Program Studi Teknik Industri
2Program Studi Teknik Mesin
Universitas Pembangunan Nasional Veteran Jakarta
(Makalah: Diterima Oktober 2017, direvisi Mei 2019, dipublikasikan Juli 2019)
Intisari— Beban kerja yang tidak merata yang terjadi di setiap proses atau setiap stasiun kerja, berdampak pada hasil yang sulit dicapai dan bahkan gagal. Atau bahkan jika dilakukan tetapi dengan menambahkan lebih banyak usaha, itu menciptakan masalah baru. Ini tidak hanya terjadi pada sistem mekanis seperti mesin mobil atau generator, tetapi juga terjadi pada sistem tubuh manusia. Bahkan dapat berdampak pada aspek psikologis yang sulit diukur seperti kecemburuan di kalangan pekerja. Penelitian ini terdiri dari dua topik yang dilaksanakan bersamaan dengan topik beban kerja dan topik desain produk. Studi beban kerja, upaya untuk meningkatkan beban kerja yang tidak merata dari layanan pembersihan di lantai auditorium dengan bantuan alat pembersih lantai mandiri. Mulailah dengan mengukur beban kerja layanan kebersihan sebelum pelaksanaan penelitian ini. Kemudian diakhiri dengan pengukuran lagi dengan metodologi kepegawaian setelah implementasi penelitian. Topik desain produk mencoba untuk mengurangi jumlah sensor yang penelitian sebelumnya lainnya menggunakan 3 atau 5 sensor menjadi hanya 2 sensor yaitu LIDAR dan Kompas. Topik ini menggunakan roda mekanum langsung pada stepper NEMA 17 sebagai sistem drive sederhana. Sistem ini dapat membersihkan hingga 252 m2 dalam 20 menit. Diharapkan bahwa pembersih lantai otomatis dapat membantu memperlancar beban kerja layanan pembersihan sehingga mereka tidak perlu bekerja jauh sebelum jam kantor dan tidak perlu pulang lama setelah jam kantor. Diharapkan untuk diterapkan pada kasus serupa di bangunan lain.
Keywords— Robot Sapu, Beban Kerja, Disain, Arduino.
Abstract— Uneven workloads that occur in every process or every work station, impact on outcomes that are difficult to achieve and even fail. Or even if accomplished but by adding more effort, it creates new problems. This does not happen only in mechanical systems such as car engines or generators, but also occurs in human body systems. It can even impact psychological aspects that are difficult to measure such as jealousy among workers. This study consists of two topics that carry out simultaneously with the topic of workload and product design topics. The workload study, attempts to improve the uneven workload of cleaning service on the auditorium floor with the help of a self-sustaining floor cleaning tool. Begin by measuring the workload of cleaning service before this research implementation. Then ended with a measure again with staffing methodologies after research implementation. The product design topics attempts to reduce the amount of sensors which other previous research using 3 or 5 sensors to only 2 sensors that is LIDAR and Compass. This topics is using mechanum wheel straight on a NEMA 17 stepper as a simple drives system. The system can clean up to 252 m2 in 20 minute. It is expected that automatic floor cleaners can help smooth the workload of cleaning service so they don’t need to work very early long before office hour and no need to home long after office hour. Its expected to be applied to similar cases in other buildings.
Keywords— Robot Sapu, Beban Kerja, Disain, Arduino.
I. PENDAHULUAN
Robot sapu telah berkembang lebih dari 15 tahun (Prassler
E, 2000), dengan berbagai tahapan teknologi autonomous
seperti penggunaan sensor ultrasonik , infrared (Pandey A,
2014) sampai Lidar (produk komersial). Lalu teknologi
mobilitas robot menggunakan roda biasa (Manya Jain, 2017),
omni wheel (Xueshan, 2009), sampai mechanum wheel tetapi bukan robot sapu. Mayoritas dari robot tersebut berdimensi kecil dan dirancang khusus untuk rumah tangga. Panjang sapu pada robot tersebut tidak lebih dari 50 cm, bahkan cenderung di rancang sekecil mungkin agar dapat bermanuver untuk
menghindari halangan seperti kaki meja, kursi dan dapat masuk ke sela-sela lantai.
Penelitian ini bermaksud untuk mengurangi jumlah sensor yang ada pada penelitian, Karthick.T, 2015 yaitu dua sensor tembok ultrasonik dan mengganti satu sensor tembok infra merah pada produk Romba (Pandey A, 2014). Lalu penelitian ini mencoba teknologi lebih kekinian yaitu menggunakan
mechanum wheel dan sensor Lidar. Disamping itu merancang suatu robot sapu yang lebih panjang dari penelitian sebelumnya
dan dari produk komersial, agar dapat menggunakan lobby
duster yang biasa dipakai oleh cleaning service. Namun pastinya menggunakan beberapa asumsi yaitu: isi dari ruangan
26
yang akan diteliti adalah tanpa kursi dan meja, tidak mengukur tingkat pengukuran kebersihan lantai dan toleransi luasan yang tidak bersih adalah 10%.
Gedung fakultas teknik Limo (FT) memiliki 5 lantai yang masing masing memiliki luasan 20 meter x 10 meter yang terbagi dalam banyak ruangan. Masing-masing lantai
dibersihkan oleh cleaning service sejumlah 1 orang sesuai
jadwal yang berlaku. Jadwal yang berlaku saat ini yaitu 3
cleaning service untuk membersihkan lantai 1, 2, 3 pada pagi hari. Lalu pada siang hari, lantai tersebut hanya dibersihkan
oleh 2 cleaning service, kecuali lantai 5 yang tidak dibersihkan,
karena sangat jarang dipakai. Berarti terdapat 1 cleaning
service yang bekerja di 2 lantai yaitu lantai 4 dan 5.
Dalam durasi kerja 8 jam, para cleaning service melakukan
beberapa kali penyapuan lantai dengan rutin sebanyak 1 kali tiap 2 jam. Penyapuan menggunakan 2 alat yang berbeda seperti Gambar 1.
Durasi kerja di lingkungan FT adalah 8 jam. Mulai dari jam 0800 sampai jam 1600. Namun petugas kebersihan harus tiba lebih awal dan pulang paling telat. Seringkali ketika waktu sore menunjukkan sekitar jam 1700 masih terdapat mahasiswa yang beraktifitas di gedung ini. Sehingga lantai menjadi kotor kembali. Kadangkala petugas tidak sempat membersihkan lantai secara keseluruhan karena sudah melampaui batas waktu kerjanya. Maka petugas shift siang melaporkan kepada petugas shift pagi untuk membantu menyelesaikan kebersihan tersebut di waktu pagi, di hari berikutnya.
Petugas kebersihan yang harus datang lebih awal dan pulang lebih telat serta kurangnya jumlah petugas kebersihan dibanding dengan jumlah lantai, membutuhkan ekstra waktu dan energi untuk menyelesaikan pekerjaannya. Bahkan tidak jarang para pekerja melampaui batas jam kerja, padahal tidak ada honor lembur. Dengan adanya alat tersebut diharapkan beban kerja antar petugas kebersihan dapat lebih merata.
Gambar 1. Petugas cleaning service membersihkan lantai gedung Fakultas Teknik
II. TINJAUANPUSTAKA
A. Staffing Methodologies
Merancang pegawai mengacu pada jumlah karyawan yang memiliki tingkat keterampilan tertentu sebuah departemen untuk memenuhi permintaan yang diberikan untuk layanan. Penentuan pegawai pada dasarnya adalah masalah pengukuran kerja. Hal ini membutuhkan daftar semua tugas yang berbeda dilakukan oleh tingkat keterampilan tertentu di departemen. Tugas-tugas di departemen diklasifikasikan sebagai konstan atau variabel. Tugas konstan adalah tugas yang tidak
berhubungan langsung dengan output departemen, yaitu,
mereka tidak tergantung pada tingkat permintaan layanan. Misalnya, membersihkan area kerja dan peralatan setiap pagi di laboratorium untuk tes darah adalah tugas konstan yang tidak tergantung pada jumlah spesimen yang diuji. Tugas variabel adalah mereka yang secara langsung berhubungan dengan
output dari departemen. Misalnya, tugas variabel mungkin pengujian aktual dari spesimen. Total waktu yang dihabiskan selama satu hari dalam pengujian spesimen akan sama dengan waktu yang dibutuhkan untuk menguji satu spesimen dikalikan dengan jumlah total spesimen yang diuji dalam sehari. Setelah pengidentifikasian tugas konstan dan variabel, isi pekerjaan yang terkait dengan tugas masing-masing diukur. Isi pekerjaan dapat diukur dengan menggunakan salah satu teknik kerja-pengukuran tradisional seperti studi stopwatch waktu, sistem
waktu gerak yang telah ditetapkan, dan work sampling. Isi
pekerjaan juga bisa dibentuk dengan menggunakan pendekatan
Delphi di mana sekelompok ahli yang sudah paham dengan tugas tersebut lalu mencoba untuk mencapai konsensus tentang waktu yang dibutuhkan untuk menyelesaikan tugas. Frekuensi di mana setiap tugas variabel terjadi per hari juga ditentukan. Jumlah jam kerja yang akan digunakan untuk setiap tingkat keterampilan kemudian ditentukan dengan menambahkan waktu yang dibutuhkan untuk untuk melakukan tugas-tugas konstan dan tugas-tugas variabel pada tingkat frekuensi yang diberikan terkait dengan permintaan diberikan untuk layanan.
Salah satu kelemahan dari menggunakan teknik pengukuran kerja umum adalah bahwa proses ini sangat rumit dan memakan waktu. Selain itu, setiap saat metode berubah, elemen kerja dari berbagai tugas harus diukur lagi. Alternatif lain
mungkin menggunakan salah satu metode standar-staffing
tersedia di industri kesehatan. Metodologi ini menjelaskan tugas-tugas khas yang dilakukan di departemen rumah sakit tertentu dan menetapkan waktu standar untuk setiap tugas. Pemantauan sumber daya System (RMS), yang dikembangkan oleh Asosiasi Rumah Sakit New York State, adalah contoh dari satu sistem tersebut.
Waktu yang tersedia per Full Time Equivalent (FTE) juga
dihitung. Jika departemen buka jam 8:00-05:00 dengan istirahat makan siang satu jam dan jika dua kali 15 menit istirahat diperbolehkan selama shift, maka waktu yang tersedia per FTE per hari akan 7,5 jam. Yang diperlukan FTE sebenarnya tergantung pada variabilitas permintaan, masalah cakupan, kendala penjadwalan, persyaratan tingkat keterampilan, dan faktor-faktor yang lain. Satu pendekatan adalah untuk menentukan tingkat efisiensi (sejumlah kurang dari satu) yang
27
didefinisikan sebagai rasio dari jam penyelesaian teori terhadap
jam penyelesaian aktual, termasuk waktu idle jika ada. FTE
ditentukan menggunakan persamaan (1) berikut:
TABEL 1
STAFFING REQUIREMENTS FOR NURSING AIDES
Sumber: Swatantra K. Kachhal, halaman 743
B. Arduino
Arduino merupakan suatu istilah yang banyak mengandung
makna di antaranya : sebuah perangkat keras komputer
open-source dan software namun sekaligus juga mewakili perusahaan, proyek dan komunitas pengguna. Komunitas ini yang mendesain dan memproduksi kit berbasis mikrokontroler untuk membangun perangkat digital dan objek interaktif yang dapat merasakan dan mengontrol dunia fisik. (arduino.cc)
Gambar 2. Contoh perangkat keras arduino uno
Arduino adalah suatu alat elektronik yang memproses masukan menjadi suatu reaksi tertentu seperti menghidupkan
lampu, membuat teks berjalan, menggerakan motor listrik dan sebagainya.
Masukan yang dibutuhkan dalam percobaan ini hanya ada satu jenis yaitu jarak yang diperoleh dari sensor parallax yaitu jarak antara alat ini dengan penghalang di depannya. Pada jarak tertentu alat pembersih ini akan bermanuver menghindari penghalang. Untuk pemrograman mikrokontroler, platform Arduino menyediakan lingkungan pengembangan terpadu (IDE) berdasarkan proyek Pengolahan, yang meliputi dukungan untuk pemrograman C, C ++ dan Java bahasa.
C. Bahasa C++
Program Arduino ditulis dalam C atau C ++, Arduino IDE datang dengan kumpulan kode perangkat lunak yang disebut "Wiring" dari proyek Wiring asli, yang membuat banyak operasi umum input / output jauh lebih mudah. Para pengguna hanya perlu mendefinisikan dua fungsi untuk membuat program eksekutif siklik dieksekusi:
setup (): fungsi yang berjalan sekali pada awal program dan yang dapat menginisialisasi pengaturan.
loop (): fungsi yang dilaksanakan berulang-ulang sampai papan itu tidak menyala lagi.
Sebuah program pertama yang khas mikrokontroler adalah hanya untuk membuat LED berkedip dan mati. Dalam lingkungan Arduino, pengguna mungkin menulis sebuah program seperti di bawah:
#define LED_PIN 13 void setup() {pinMode(LED_PIN, OUTPUT); } void loop() {digitalWrite(LED_PIN, HIGH); delay(1000); digitalWrite(LED_PIN, LOW); delay(1000); }
Pemrograman di atas dapat diterjemahkan sebagai berikut : Menugaskan pin ke 13 untuk keluaran digital dan memberi nama pin ke 13 dengan nama LED_PIN. Ketika program sudah berjalan, LED_PIN diperintahkan untuk mengalirkan listrik yang menghasilkan lampu bersinar selama 1000 mili detik. Setelah bersinar selama itu, LED_PIN diperintahkan untuk memutuskan aliran listrik selama 1000 milidetik, akibatnya lampu mati selama itu dan akan hidup kembali dengan selang yang sama di awal dan seterusnya.
D. Penelitian Terdahulu
Judul harus dalam tipe Reguler 24 pt font. Definisi dari
fungsi yang diinginkan dan disain dari robot personal masih dalam perdebatan. Sementara itu, para pendahulu masih belum berkembang dengan baik dalam perjalanan mereka menjadi produk komersial. Robot pembersih untuk lingkungan terbuka dan juga rumah tangga nampaknya dapat memberikan
28
terobosan yang mana para disainer robot non-industri sudah lama menanti (Prassler E., et al, 2000),
Survey ini menjelaskan pemilihan dari 30 jenis robot pembersih., dengan fokus pembersih lantai, khususnya dalam ruangan. Tidak semua robot tersebut mencapai tahap produk komersial, jumlah tersebut tentunya merefleksikan harapan dari nilai ekonominya. Di pasar jasa pembersihan di Eropa sendiri diestimasikan sejumlah $100 milyar per tahun. Maka tidak heran industri pembersihan dan para pembuat alat kebersihan antusias terhadap sistem robot yang membersihkan secara semi otomatis. (Prassler E., et al, 2000)
Penelitian Xueshan (2009), berfokus terhadap roda yang berbentuk bulat sehingga dapat bergerak lebih bebas untuk membersihkan lantai. Tujuan penelitian tersebut untuk digunakan dalam rumah tangga, sempit dan ramai atau ruangan penuh perabotan dan untuk menyediakan dasar pelajaran robotik di laboratorium.
Sistem robot ini menggunakan roda Swedish, satu sikat
pengumpul dan semacam alat peraba berbentuk air-bag.
Analisis dari desain tersebut melibatkan kinematik dan kondisi kendali gerak, khususnya lebih menjelaskan metode disain tentang roda. Selain dapat berjalan secara semi otomatis dan kendali jarak jauh, robot dapat memutar balik, menghindari suatu halangan dan dipasangi sistem otomatis manajemen daya. Penelitian robot pembersih oleh Chaple A., et all, (2012)
mampu melakukan seperti menyapu, vacuum, dan menyikat
satu arah. Semua mekanisme tersebut berjalan secara simultan.
Sistem tersebut menggunakan 2 motor DC untuk
menggerakkan roda, sikat, pompa vakum, semprotan air dan tempat sampah dalam. Sirkuit ACR menggunakan sensor untuk mendeteksi halangan didepan dan menggunakan Real Time Clock untuk mengatur kapan hidup dan kapan mati seperti penjadwalan kebersihan. Robot tersebut dilengkapi dengan layar LCD yang menampilkan sisa energi baterai dan waktu.
Penelitian yang dilakukan saat ini mirip dengan penelitian pendahulu dalam hal fungsi pembersih, hanya saja ukuran panjangnya 85cm, jenis roda menggunakan mechanum wheel, dan sensor jarak menggunakan Lidar.
III.METODOLOGI PENELITIAN
Secara keseluruhan tahap pengembangan produk ini terdiri atas 5 fase. Berikut ini penjelasan fase secara berurut:
A. Perencanaan
Awal pelaksanaan kegiatan ini dimulai mengumpulkan
segala informasi mengenai Staffing methodology, referensi
desain peralatan pembersih lantai otomatis dan studi literatur. Studi literatur dapat berupa buku teks, jurnal, paper, dokumentasi manufaktur dan modul praktikum. Dari seluruh sumber literatur dipelajari sehingga penelitian ini dapat berjalan sesuai dengan yang direncanakan. Peralatan dikerjakan secara parallel dengan pengukuran beban kerja.
B. Desain Platform dengan menggunakan software
Desain alat pembersih otomatis menggunakan software
Computer Aided Design (CAD) 3 Dimensi. Dengan adanya tahap ini, fabrikasi dapat dipermudah dengan modifikasi part yang mudah dibentuk. Beberapa komponen yang perlu diperhatikan adalah:
- Motor Penggerak
- Peletakan komponen elektronik
- Perencanaan Mur-Baut
- Ukuran akhir peralatan pembersih lantai otomatis
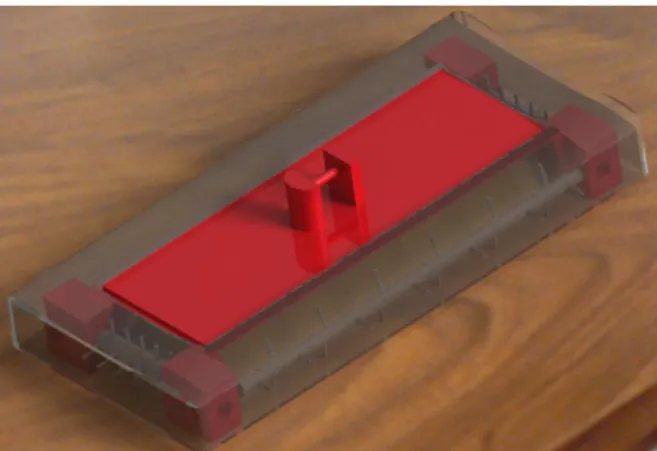
Gambar 3 adalah desain awal peralatan pembersih otomatis dan mandiri. Desain tersebut akan selalu direvisi karena menyesuaikan dengan kebutuhan, misalnya perubahan ukuran komponen, perubahan bentuk komponen untuk menambah kekokohan alat, penambahan komponen elektronik dan lain sebagainya. Pembersih tersebut tetap dikendalikan oleh operator, namun mekanisme pengambilan kotoran debunya tidak menggunakan tenaga manusia tetapi tenaga baterai untuk memutar sikat di dalamnya dan inilah yang disebut otomatis. Karena operator hanya mendorong atau menarik alat ini lalu mengarahkan ke tempat lain yang lantainya lebih kotor.
Gambar 3. Platform robot pembersih lantai
C. Produksi
Tahap produksi meliputi pembelian komponen dan bahan mentah, fabrikasi dan perakitan. Peralatan produksi yang
digunakan adalah drill, grinding dan gergaji.
D. Pengukuran Beban Kerja
Beban kerja Cleaning Service akan diambil sebelum
menggunakan robot pembersih. Pengukuran tersebut antara
lain, waktu yang dibutuhkan oleh variable dan constant activity
lalu menentukan waktu kerja total dalam 1 shift. Pengukuran ini akan menggunakan wawancara.
E. Analisis Hasil Kerja
Pada tahap ini ada 2 data yang perlu diambil, yaitu kecepatan robot yang optimal dalam penyelesaian tugasnya. Kedua, data
beban kerja Cleaning Service yang akan diambil ketika sedang
menggunakan robot pembersih.
29
Pada tahap ini akan membandingkan waktu kerja total dalam 1 shift sebelum dan sesudah menggunakan alat tersebut.
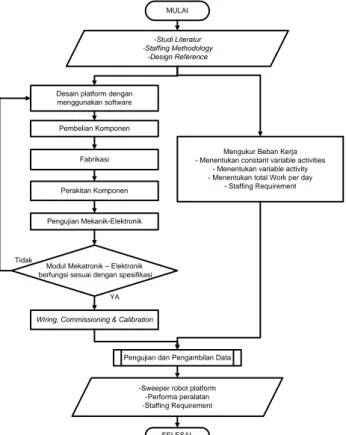
Berikut ini adalah metode pelaksanaan yang digambarkan dalam diagram alir:
MULAI
-Studi Literatur -Staffing Methodology
-Design Reference
Desain platform dengan menggunakan software
Pembelian Komponen
Fabrikasi
Perakitan Komponen
Pengujian Mekanik-Elektronik
Modul Mekatronik – Elektronik berfungsi sesuai dengan spesifikasi Tidak
YA Wiring, Commissioning & Calibration
-Sweeper robot platform -Performa peralatan -Staffing Requirement
SELESAI. Pengujian dan Pengambilan Data
Mengukur Beban Kerja - Menentukan constant variable activities
- Menentukan variable activity - Menentukan total Work per day
- Staffing Requirement
Gambar 4. Diagram Alir Penelitian
IV.HASIL DAN PEMBAHASAN
A. Fabrikasi dan Perakitan
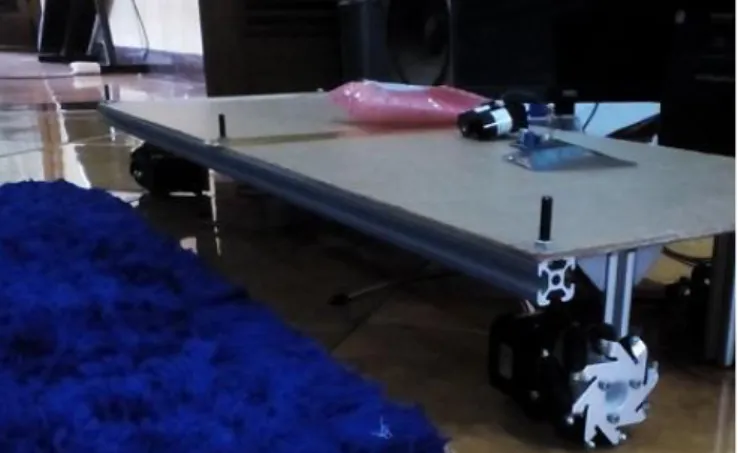
Fabrikasi dilakukan pada badan robot dari bahan akrilik 2 mm dan rangka robot. Bentuk pemotongan akrilik disesuaikan sampai sisi terluar rangka utama setelah perakitan rangka utama berbentuk segi empat selesai. Material rangka utama menggunakan alumunium profile 20x20 seperti Gambar 5 di bawah ini.
Gambar 5. Prototype robot sapu
Pemesinan miling dilakukan pada akrilik tebal 5 mm untuk
membuat gear dalam seperti pada Gambar 6, sebanyak 4 buah.
Gear dalam tersebut digunakan sebagai bagian dari mecanuum
wheel yang kemudian digabung ke gear luar milik motor
stepper. Dimensi dan posisi tiga lubang gear dalam
menyesuaikan dimensi mecanuum wheel.
Gambar 6. Gear dalam
Layar lcd (Gambar 7) berisi informasi sisa energi dari 8 baterai (Gambar 8), memperlihatkan arah kompas robot ini
menghadap, lalu status operasional apakah sedang scanning,
menganggur atau bekerja.
Gambar 7. LCD screen
Gambar 8. Sumber daya 8 baterai
Gambar 9 menunjukkan robot dengan posisi siap beroperasi
dan menunjukkan seberapa panjang ukuran loby duster
30
Gambar 9. Robot sapu dan lobby duster
B. Perakitan Kabel
Arduino pro mini 328P memiliki 13 pin digital dan 6 pin analog. Semua pin digital dipakai untuk mengendalikan 5 stepper kecuali pin 0,1 tidak dapat dipakai karena khusus TX dan RX. Semua stepper secara berturut-turut diberi nama A, B, C, D, E. Stepper A di colok ke pin 4 dan 5. Stepper B dipasang ke pin 6 dan 7. Stepper C dipasang ke pin 8 dan 9. Stepper E dipasang ke pin 12 dan 13.
Semua pasangan pin di atas dihubungkan ke pin step dan direction pada tiap modul stepper driver A4988 sejumlah 5 modul. Lalu pin VDD atau sumber daya driver dikumpulkan pada 1 jalur di breadboard yang kemudian ditenagai 2 baterai Li-ion paralel tipe 18650 3.7 volt.
Driver A4988 dapat menerima tegangan 3v sampai 5.5v. Pin Vmot atau sumber daya motor tidak menggunakan kapasitor, namun sangat disarankan untuk menggunakannya sebesar 100 µF agar terjamin kelancaran tugasnya. Bobot robot yang berat
dapat mengakibatkan “skip” pada stepper. Maka besaran
ampere yang digunakan di atur sampai maksimal sebesar 1.5A
agar stepper kuat dan tidak mudah skip. Jika arus diberikan
sampai 2A maka chip cepat panas dan berpotensi berumur
pendek. Spesifikasi dan pemasangan driver A4988 ke mikrokontroler serta pengukurannya dapat dilihat pada gambar 10.
Gambar 10. Microcontroller arduino pro mini 328P
Pada dasarnya motor stepper memiliki 4 kabel. Namun perkembangan teknologi membutukan putaran yang lebih presisi sehingga munculah stepper 6 kabel. Stepper yang digunakan dalam penelitian ini adalah tipe 6 kabel. Namun
hanya 4 kabel yang dihubungkan ke driver A4988. Pemasangan kabel driver A4988 ke motor stepper dapat dilihat pada gambar 11 dibawah.
Gambar 11. Pemasangan A4988
Pemasangan kabel Lidar meng-gunakan jalur Pulse Width
Modulator (PWM). Pin 2 dan 3 dihubungkan dengan resistor 10K ohm. Kabel kuning dihubungkan ke pin 3 (pwm) seperti Gambar 12. Kode telah beredar di internet dengan kata kunci
Lidar Lite V3 examples.
Gambar 12. PWM arduino wiring
C. Pemrograman Bahasa C
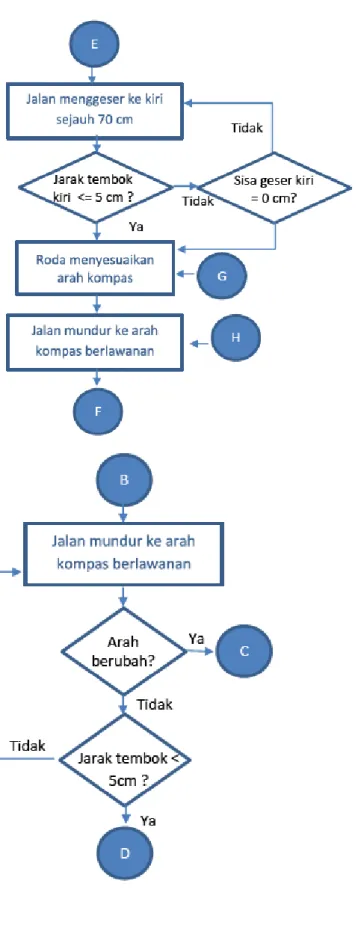
Sebelum memprogram, perlu adanya alur berpikir logis dan sistematis tentang bagaimana robot bekerja. Asumsi yang digunakan adalah ketika tombol start di tekan maka robot langsung aktif bekerja sesuai alur kerja. Alur kerja robot tersebut digambarkan dalam bentuk diagram alir seperti Gambar 13 di bawah ini.
32
Gambar 14. Rute zig-zag
Diagram alir di atas akan menghasilkan rute jalan zig-zag seperti gambar 14. Dan robot akan terus menerus bekerja mengulangi rutenya sampai baterai habis. Atau pengguna alat
ini dapat mematikan langsung tombol on/off sebelum baterai
habis. Pemrograman bisa diatur sehingga robot berhenti ketika sisa energi tinggal 10%.
Beberapa langkah pada gambar 13 merupakan instruksi umum yang dapat diurai lagi menjadi instruksi-instruksi khusus. Contohnya pada langkah Roda Menyesuaikan Arah Kompas. Langkah tersebut merupakan Blok Pemrograman yang mengandung kondisi-kondisi tertentu yang jika dijabarkan akan menambah diagram alir semakin panjang. Kondisi tersebut tergantung dari pembacaan sensor kompas. Instruksi khusus ditujukan kepada empat roda yang berputar tergantung pada kondisi arah kompas. Meskipun diagram alir dibuat sesingkat mungkin, namun aliran masih mengikuti logika kerja rute zig-zag.
Kecepatan stepper motor di setel dalam code yang berwarna merah berikut dibawah ini:
void maju(){
digitalWrite(dirPinA,LOW); digitalWrite(dirPinB,HIGH); digitalWrite(dirPinC,HIGH); digitalWrite(dirPinD,LOW);
33
for(int x = 0; x<=400; x++) { digitalWrite(stepPinA,HIGH); digitalWrite(stepPinB,HIGH); digitalWrite(stepPinC,HIGH); digitalWrite(stepPinD,HIGH); delayMicroseconds(1000); digitalWrite(stepPinA,LOW); digitalWrite(stepPinB,LOW); digitalWrite(stepPinC,LOW); digitalWrite(stepPinD,LOW); delayMicroseconds(1000); } }Kode tersebut menghasilkan putaran roda sejumlah 3x dalam 1 detik. Dengan keliling roda sebesar 15.7 cm maka perjalanan menempuh 28 meter per menit. Namun ketika di uji coba jalan di lantai, laju merosot menjadi 30 cm per detik atau 18 meter per menit. Hal ini disebabkan beban robot dan disain
mechanum wheel yang memungkinkan adanya loose grip atau slip dengan lantai.
Oleh karena itu kecepatan stepper di tambah dengan cara
merubah nilai delayMicroseconds menjadi 600. Namun ketika
di uji coba di lantai, kadang kala stepper tertentu mengalami
skip. Sehingga kecepatan tidak secara siginifkan bertambah.
Maka kode delayMicroseconds di rubah ke nilai 1000 kembali.
Jarak tempuh secara teori adalah laju per menit dikali lamanya operasi yaitu 18 m/min x 20 min = 360 meter. Lebar sapu efektif sepanjang 70 cm. Sehingga robot ini dalam
operasinya mencakup luasan 252 m2 dalam waktu 20 min.
Namun dalam kenyataannya menghasilkan luasan 230 m2
dikarenakan putar balik arah dan sering terjadi skip terutama
ketika energi baterai yang hampir habis.
Berikut ini adalah rangkuman data komponen - komponen yang digunakan dan karakteristik prototype robot sapu ketika uji coba di ruangan besar 20 x 10 meter.
TABEL 2 PERALATAN
Equipment
Nama Spesifikasi
Microcontroller Pro Mini 328P 16Mhz Stepper 5 pcs Nema 17 Minebea Driver 5 pcs A4988
Roda 4 pcs Mechanum 50mm Baterai 8 pcs 18650 600 mAh Baterai 1 pcs Turnigy 6000mAh LCD 1 pcs 4x20 Blue, I2C Sensor 1 pcs Lidar Lite V3 Rangka Profile 20x20 Siku > 20 pcs 1.5 x 2.5 cm Breadboard 3pcs Mini Breadboard 1pcs 15 x 4 cm Saklar mini TABEL 3
DATA KAPABILITAS ROBOT Bobot 3.2 Kg Durasi operasi 20 menit Jarak Tempuh 329 meter Luasan 230 m2
Kelebihan 30 m2
Completion Time 11 m2 / min
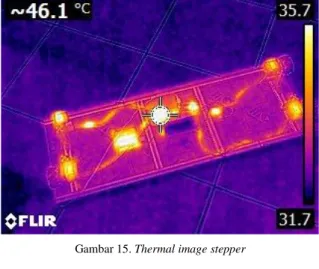
Energi sisa 40 % Komponen terpanas Driver, Lidar Suhu Driver dan
Suhu Lidar
46.1 oC,
44.5 oC
Konsumsi Arus per stepper (multitester)
0.66 A
Durasi operasi diambil rata-rata dari 5x percobaan yang mana jam henti diakhiri ketika stepper mulai sering mengalami
skip karena tenaga baterai tipe 18650 sudah berkurang dengan
sisa 40%, yang di ukur menggunakan alat seperti pada gambar 8. Arus di ukur dengan multitester merek Heles. Pengukuran dilakukan sebelum uji coba di lantai, dengan terlebih dahulu
memprogram stepper agar coil nya selalu dialiri arus tanpa
putus. Atau dengan kata lain continuous Logic High.
Komponen terpanas adalah papan driver daripada heatsink
nya. Selain itu kabel juga menghasilkan panas, terlebih pada
sambungan kabel juga menghasilkan panas sekitar 67oC ketika
dijalankan pada menit ke 20.
Gambar 15. Thermal imagestepper
34
Gambar 17. Thermal imagelidar
Gambar 18. Real time
Gambar 17 menunjukkan suhu komponen Lidar yang
beroperasi selama lebih dari 5 menit, yaitu suhu 44.5oC. Selain
itu dapat kita lihat salah satu baterai yang menghasilkan panas
sekitar 43 oC, disebabkan baterai tersebut telah habis energinya.
Komponen baterai 18650 perlu mendapat perhatian dalam hal keselamatan karena dapat berpotensi meledak.
D. Staffing Requirement
Tugas CS (Cleaning Service) terdiri dari aktifitas rutin dan
non-rutin. Aktifitas CS tidaklah seperti pegawai pada umumnya yang bekerja terus menerus sampai 7 jam. CS tidak selalu menjalankan tugasnya tiap jam. Mereka beroperasi jika keadaan sangat kotor dan jika ada tugas khusus. Justru CS akan mengganggu perkuliahan apabila kelas selalu dibersihkan. Jadi CS bekerja sebelum kelas di mulai dan setelah kelas dimulai. Sama halnya dengan ruang kantor dan toilet, CS memiliki jam kerja tertentu untuk membersihkannya. Dalam 1 hari minimal CS membersihkan 2 kali khusus aktifitas sapu dan pel untuk semua ruangan. Waktu yang dihabiskan CS untuk aktifitas rutin membersihkan 1 lantai dan meja kuliah masing masing adalah 30 menit dan 30 menit. Ruangan dan lantai harus bersih 30 menit sebelum aktifitas perkantoran di mulai. Lalu aktifitas non-rutin seperi lap kaca jendela dan lemari dilakukan satu kali
dalam satu minggu, membutuhkan waktu 20 menit per 1 lantai. Dalam kasus ini, lantai 4 dan 5 dikerjakan 1 orang CS yang membersihkan minimal 2x selama kerjanya. Jika keadaan hujan maka lantai dibersihkan 3 sampai 4x.
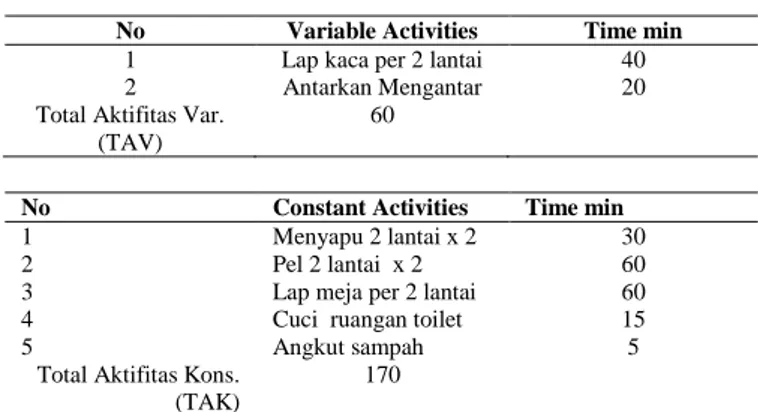
TABEL 4
AKTIFITAS CLEANING SERVICES
No Variable Activities Time min
1 Lap kaca per 2 lantai 40 2 Antarkan Mengantar 20 Total Aktifitas Var.
(TAV)
60
No Constant Activities Time min
1 Menyapu 2 lantai x 2 30 2 Pel 2 lantai x 2 60 3 Lap meja per 2 lantai 60 4 Cuci ruangan toilet 15 5 Angkut sampah 5
Total Aktifitas Kons. (TAK)
170
Lap kaca per lantai dikonversi ke dalam menit per hari, maka 6 hari kerja yaitu 40/6= 6.67 menit. Antar-mengantar adalah aktifitas tambahan yang bukan tugasnya namun beberapa kali dilakukan tiap minggu, misalkan antar makanan, antar dan ambil fotokopian, angkut kursi dan lain-lain. Aktifitas tersebut juga dikonversi ke dalam menit per 6 hari kerja yaitu 20/6= 3.6 menit. Total waktu kerja dalam 1 hari adalah TAV konversi + TAK = 10 + 170 = 180 menit kerja per hari. Jadi Full Time Equivalent yang dibutuhkan adalah :
180 min per hari / (4 jam kerja (Shift) x 0.9 efficiency) = 180 / 216 = 0.813 FTE atau kurang dari 1 orang.
Seperti yang telah dijelaskan sebelumnya bahwa jenis pekerjaan ini memang tidak menuntut bekerja secara penuh dikarenakan kondisi lapangan yang memang tidak menuntut terus menerus. Oleh karenanya jumlah pegawai sangat tidak signifikan. Contoh pekerjaan lain yang sejenis adalah pemadam kebakaran dan Badan Nasional Penanggulangan Bencana.
Meskipun beban kerja CS tersebut dapat dikatakan ringan, namun dalam kenyataan dilapangan terjadi waktu kerja yang melebihi jam kerja normal. CS harus datang 1 jam lebih awal sebelum perkantoran beroperasi. CS juga pulang setelah perkantoran tutup < 1 jam kemudian. Jadi sebelum menerapkan alat ini secara keseluruhan jam kerja CS adalah 9 jam ± 30min. Maka dengan alat ini dapat mengurangi waktu kedatangan yang terlalu dini sekitar 30 menit di awal operasional kantor dan mempercepat waktu pulang sekitar 30 menit di akhir operasional kantor.
Alat ini juga memberikan solusi bagi kondisi sengketa antara pihak fakultas X dan fakultas Y yang bersama – sama menggunakan lantai 5 Auditorium. Penggunaan gedung bersama ini mengakibatkan kewajiban kebersihan yang menjadi tidak menentu. Oleh karena itu hadirnya robot pembersih ini diharapkan menjadi solusi selamanya, kecuali
sedang breakdown, bahwa lantai 5 tidak perlu menunggu siapa
35
V. KESIMPULANDANSARAN
Robot penyapu lantai berjalan memenuhi beberapa target utama seperti mengandalkan 2 sensor saja yaitu Lidar dan kompas untuk menyelesaikan tugasnya namun ada beberapa poin penting yang perlu di perbaiki yaitu penambahan baterai 18650 sebesar minimal 4 pcs untuk mencegah panas yang timbul terlalu dini.
Dikarenakan waktu dan dana yang terbatas, maka penelitian
selanjutnya disarankan menggunakan pulley pada sistem
penggerak dibanding mengganti stepper yang lebih besar, agar
stepper tidak mengalami skip yang disebabkan bobot robot. Merubah disain body yang mendukung sistem pendinginan
udara agar dapat menambahkan exhaust fan. Kemudian disain
struktur Lidar perlu di tambahkan stop switch agar putaran
Lidar tidak berlebihan. Lalu pemrograman disempurnakan agar dapat menghindari halangan misalkan tiang dan pemrograman robot diberi jadwal hidup dan mati.
REFERENSI
[1] Arduino - Introduction, http:// arduino.cc/en/guide/introduction, diakses tanggal 1 Maret 2016.
[2] Driver A4988 https://www.pololu.com/product/1182., diakses tanggal 10 Juli 2017.
[3] Lidar manual operation. pdf
https://static.garmin.com/.../LIDAR_Lite_v3_Operation_Manual.pdf, diakses tanggal 20 Juni 2017
[4] Batan, I.M.L, 2010. Desain Produk Edisi Pertama. Inti Karya Guna:Surabaya.
[5] Gavriel Salvendy, 2001. Handbook of Industrial Engineering: Technology and Operations Management, 3rd ed. John Wiley & Sons, Inc. pp 759
[6] Johnson, C. D. 2014. Process Control Instrumentation Technology Eight edition. Pearson: Edinburgh.
[7] Jain M, Singh Rawat P, Morbale J., (2017) “Automatic Floor Cleaner”
International Research Journal of Engineering and Technology (IRJET), Vol. 4, No. 4, e-ISSN: 2395-0056
[8] Karthick,T., Ravikumar, A., et al., 2015, “Simple Autonomous cleaner Robot”, International Journal of Science, Engineering and Technology Research (IJSETR), Vol. 4, No. 5. ISSN: 2278–7798
[9] Ortiz, A., and Etter, G. (1990), ‘‘Simulation Modeling vs. Queuing Theory’’ in Proceedings of the 1990 Annual Healthcare Information and
Management Systems Conference, AHA, pp. 349–357.
[10] Pandey, A., Kaushik, A., et al., 2014. “Technological Survey on Autonomous Home CleaningRobots“, International Journal of Scientific and Research Publications, Vol 4, No. 4, ISSN 2250-3153
[11] Prassler E., Ritter A., Schaeffer C., & Fiorini P, (2000), "Autonomous Robots" Volume 9, Issue 3, pp 211-226
[12] Swatantra K. Kachhal, Industrial Engineering Applications in Health Care Systems, University of Michigan-Dearborn.
[13] Wilt, A., and Goddin, D. (1989), ‘‘Healthcare Case Study: Simulating Staffing Needs and Work Flow in an Outpatient Diagnostic Center’’ Industrial Engineering, May, pp. 22–26
[14] Xueshan G., Yan W., Dawei Z., & Koki K., (2009) "Floor-Cleaning Robot Using Omni-directional Wheels", Industrial Robot: An International Journal, Vol. 36 Iss: 2, pp.157 – 164