THE TRANSIENT STABILITY OF GENERATOR UNDER SPECIALLY CONDITION OF BLACKOUT SYSTEM
A.N. Afandi, Senior Member IAEng
Power System and Controlling Operation State University of Malang, East Java, Indonesia [email protected], http://scienta.i8.com
STABILITAS TRANSIEN GENERATOR DALAM KONDISI BLACKOUT SYSTEM ABSTRAK
Stabilitas transient merupakan keandalan sistem untuk mempertahankan keadaan sinkron setelah mengalami gangguan besar secara tiba-tiba. Faktor yang mempengaruhi stabilitas transient yaitu kekuatan jaringan transmisi dan tie line ke sistem-sistem yang berdekatan, karakteristik unit-unit pembangkit meliputi momen inersia bagian yang berputar, transient reactance dan karakteristik magnetik saturasi dari stator dan rotor. Kajian masalah stabilitas sistem tenaga ini menyakut kondisi blackout pada kota Malang, sehingga jika terjadi pemadaman total akibat terjadinya gangguan dapat dilakukan tindakan segera untuk recovery.
Berdasarkan hasil analisa aliran daya pada sistem tenaga di Malang memiliki drop tegangan terbesar pada bus Lawang, yaitu sekitar 1,71 %. Sedangkan losses terbesar terjadi pada saluran antara Infinite Bus dengan Lawang, yaitu sekitar 1.252,4 KW. Selain itu respon pembangkit mengalami perubahan tegangan untuk pembangkit Wlingi dari 0,944 pu menjadi 0,946 pu dan overshoot yang terjadi selama osilasi sebesar 0,962 pu pada 0,53 detik setelah gangguan terjadi. Sedangkan pada pembangkit Sutami mengalami overshoot untuk tegangan sebesar 0,968 pu pada 0,5 detik setelah gangguan terjadi dan tegangan berubah dari 0,948 pu menjadi 0,952 pu pada saat setabil kembali.
Kata-kata kunci: stabilitas, generator, drop, overshoot
1. PENDAHULUAN
Masalah pada sistem tenaga listrik yang sering muncul adalah masalah yang berkaitan dengan dinamika dan stabilitas sistem untuk merespon adanya gangguan yang terjadi, karena masalah dinamika dan stabilitas sistem tersebut sangat berkaitan erat dengan unjuk kerja sistem yang mencerminkan kondisi setiap saat, baik kondisi normal maupun kondisi saat terjadi gangguan, serta kondisi pemulihannya. Selanjutnya stabilitas sistem tenaga listrik didefinisikan sebagai suatu keadaan sistem untuk kembali lagi ke keadaan normal atau stabil setelah mengalami ganggguan (Nagrath, 1989). Gangguan pada sistem dapat menimbulkan osilasi tegangan, frekuensi dan daya. Oleh karena itu, perlu pengaturan agar osilasi yang terjadi segera kembali ke kondisi normal. Untuk analisa stabilitas sistem yang berkaitan dengan osilasi ada tiga kondisi yang harus dipertimbangkan, yaitu stabilitas steady state, stabilitas transient dan stabilitas dynamic (Nagrath, 1989).
Selanjutnya dalam stabilitas sistem tenaga listrik permasalahan dapat dinyatakan dengan menggunakan model persamaan diferensial, sehingga hal itu sangat berkaitan dengan terjadinya osilasi frekuensi rendah dan dapat distabilkan kembali dengan menambahkan sinyal kendali tambahan melalui Power System Stabilizer (Padiyar, 1996). Penambahan sinyal kendali melalui blok Power System Stabilizer tersebut dapat dilakukan dengan masukan umpan balik berupa perubahan kecepatan, perubahan frekuensi atau perubahan akselerasi daya (Yu, 1983).
Berbagai penelitian tentang stabilitas sistem tenaga listrik telah banyak dilakukan untuk mengevaluasi dan memperbaiki respon terhadap gangguan yang terjadi. Berkaitan dengan hal
tersebut, maka tujuan dilakukannya penelitian tentang stabilitas sistem tenaga listrik ini adalah untuk mengetahui respon generator pembangkit bila terjadi gangguan yang dapat menyebabkan sistem tenaga listrik di Kota Malang keluar dari interkoneksi sistem tenaga listrik se-Jawa Bali. Sehingga respon pembangkit yang ada dapat diketahui unjuk kerjanya saat terjadi gangguan.
2. TINJAUAN PUSTAKA
2.1. Komponen Dasar Sistem Tenaga Listrik
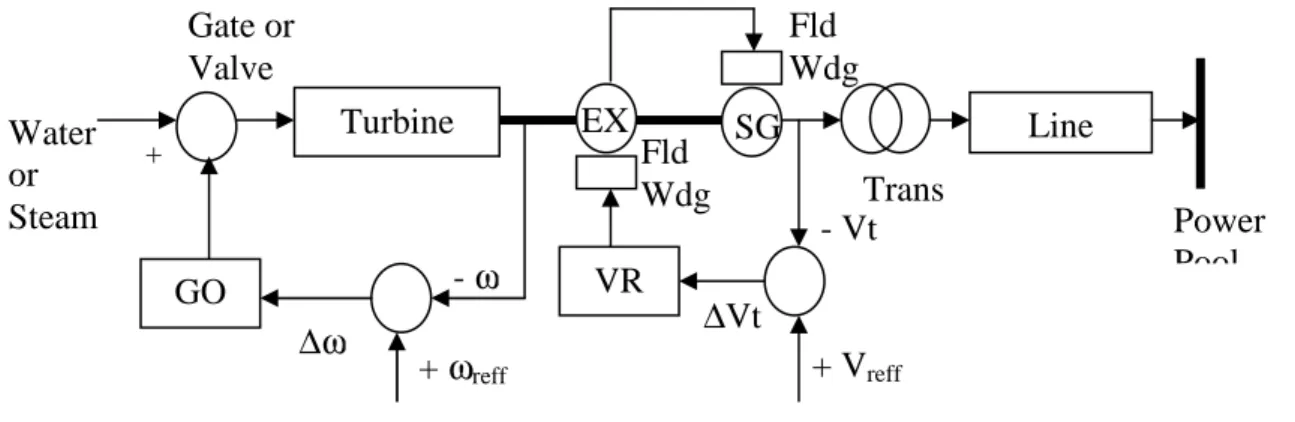
Menurut Nagrath (1989) dinamik pada sistem tenaga listrik dikarakteristikan oleh prilaku pengiriman daya yang secara keseluruhan memiliki batas maksimum sampai tercapai kondisi lepas sinkron, selain itu juga dicerminkan oleh osilasi komponen mekanis dan elektris yang diwakili oleh sudut daya δ. Selanjutnya untuk memahami prilaku dinamik pada sistem tenaga listrik dan untuk merencanakan kontrol pada perbaikan unjuk kerja sistem, Yu (1983) menyatakan sangat perlu dimengerti komponen dasar sistem tenaga listrik, khususnya yang memiliki pengaruh signifikan dengan prilaku dinamik sistem tenaga. Komponen dasar tersebut sebagaimana pada gambar 2.1. meliputi: turbin dan governor, generator, eksitasi beserta regulator tegangan, tranformator dan jaringan transmisi.
Gambar 1. Komponen sistem tenaga listrik
Pada gambar 1 ditunjukan bahwa turbin dan governor mendapat umpan balik dengan ∆ω, sedangkan eksitasi dan regulator mendapat umpan balik berupa ∆Vt. Selanjutnya generator dihubungkan ke sistem tenaga listrik melalui transformator dan saluran transmisi.
Konversi energi mekanik terjadi pada turbin uap melalui proses termodinamik, dimana uap diekspansikan melalui turbin tekanan rendah, menengah dan tinggi secara normal semuanya pada satu poros. Energi uap tekanan tinggi dan temperature tinggi dari boiler dikonversikan menjadi energi mekanik melalui sirip turbin dan dialihkan ke poros yang terhubung dengan generator.
Sedangkan governor untuk mempertahankan kecepatan konstan, yaitu kecepatan sinkron turbin-generator set. Bila kecepatan turun, guna menaikkkan keluaran daya listrik maka akan mengirim sinyal ke governor untuk menaikkan masukan daya mekanik ke turbin dan bila kecepatan naik maka daya masukan mekanik dikurangi guna mempertahankan kecepatan konstan. Pada pembangkit yang besar governor memberikan fungsi kendali daya dan frekuensi, dari area yang berada didalam interkoneksi besar.
2.2. Persamaan Ayunan
Hubungan sebuah generator yang mewakili mesin tunggal pada pembangkit listrik dan terhubung dengan infinte bus ditunjukan pada gambar 2. Generator G dihubungkan ke infinite bus yang memiliki impedansi ekuivalen ZT melalui dua saluran dan transformator T. Tegangan pada masing-masing bus adalah V1 dan V2.
Power Pool Turbine Line VR Fld Wdg Trans Fld Wdg SG EX - Vt + Vreff ∆Vt GO V ∆ω + ωreff - ω + - Gate or Valve Water or Steam
Gambar 2. Hubungan generator dan infinite bus
Pada kondisi operasi normal sumbu rotor dan sumbu medan magnetik adalah tetap. Sudut antara keduanya disebut sudut daya atau sudut torsi. Selama gangguan, rotor akan mengalami perlambatan atau percepatan terhadap putaran sinkron magnetomotive force (mmf) celah udara, dan memulai gerak relatif. Persamaan yang menggambarkan gerak relatif tersebut adalah persamaan ayunan. Jika setelah periode osilasi, rotor kembali ke kecepatan sinkron, generator akan mempertahankan stabilitas. Jika gangguan tidak diikuti dengan perubahan daya, rotor kembali ke posisi semula. Jika gangguan diikuti perubahan pembangkitan, beban atau kondisi jaringan, rotor akan menuju sudut daya operasi yang baru relatif dengan medan putar yang kembali sinkron.
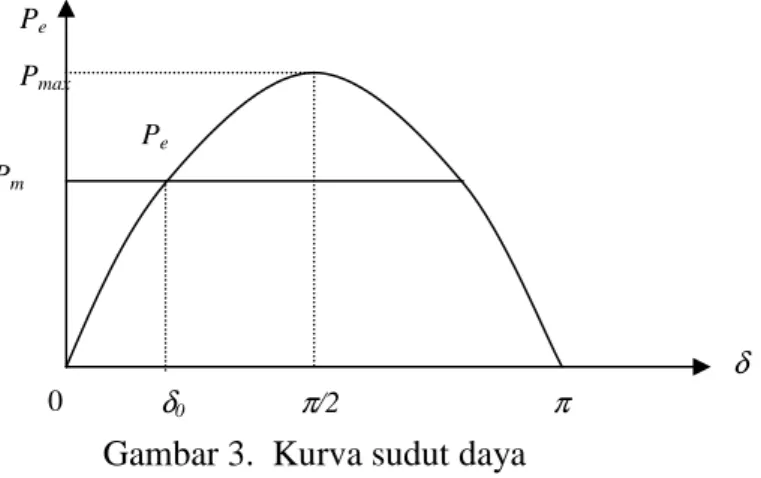
Selanjutnya dengan menggunakan rangkaian ekuivalen didapatkan power transfer pada sistem tersebut sangat tergantung pada impedansi total, tegangan masing-masing dan perbedaan sudut daya. Bila xg adalah impedansi generator, xe adalah impedansi ekuivalen sistem dan δ adalah sudut daya, maka power transfer dapat dinyatakan sebagai berikut:
δ sin e x g x b E g E e P + = ...(1)
Daya elektris maksimum didapatkan pada δ = 900, jadi daya yang dipindahkan tergantung pada reaktansi total dan sudut daya. Kurva Pe fungsi δ seperti pada gambar 3.
Gambar 3. Kurva sudut daya G V1 T Line V2 ZT Infinite Bus a. Single line generator - infinite bus
xg xe
Eg∠δ Eb∠0
b. Rangkaian pengganti generator - infinite bus
π π/2 δ0 δ Pe 0 Pm Pmax Pe
Selanjutnya untuk memahami interaksi pada analisa dinamik sistem tenaga perlu dimengerti hubungan antara sistem elektris dan mekanis, dalam hal ini pada generator untuk menentukan persamaan ayunan. Apabila generator sinkron membangkitkan torsi elektromekanik Te dan berputar dengan kecepatan ωs, serta torsi mekanik Tm pada rotor, maka pada kondisi steady state Tm = Te.
Dengan mengabaikan gesekan atau torsi redaman yang terjadi pada proses gerak rotasi, maka berdasarkan hukum gerak rotasi diperoleh :
e T m T t 2 d m θ 2 d J. = − ...(2) Dalam bentuk persamaan daya dengan momen inersia J:
e P m P t 2 d δ 2 d . m ω J. = − ...(3) Dalam bentuk persamaan ayunan dengan konstanta inersia M:
e P m P t 2 d m δ 2 d M. = − ...(4) 2.3. Model Generator
Padyar (1996) menyatakan bahwa untuk memahami dinamika sistem tenaga listrik, maka model sederhana generator sinkron kurang teliti untuk digunakan karena harus mempertimbangkan parameter-paramter yang turut berubah setiap saat. Oleh karena itu pada kajian dinamika sistem tenaga listrik perlu mempertimbangkan kumparan medan dan kumparan peredam. Selanjutnya menurut Yu (1983) jenis masalah pada dinamika sistem tenaga listrik mencakup tinggi/rendahnya osilasi frekuensi, besar/kecilnya gangguan dan besar/kecilnya sistem.
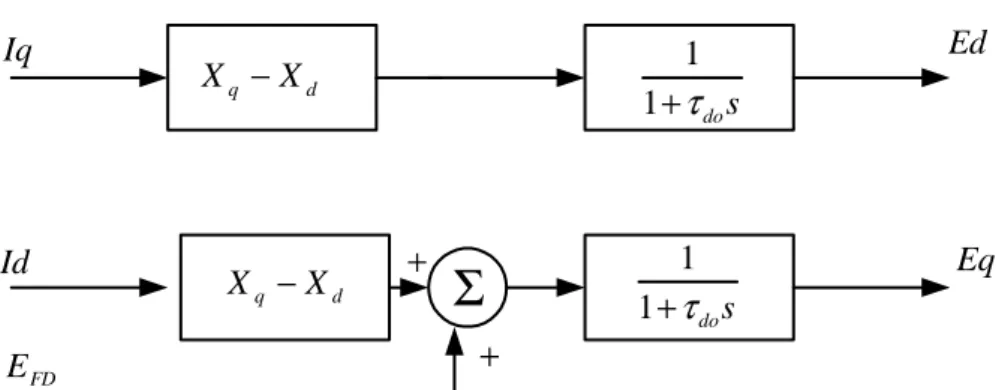
Untuk analisa generator sinkron pada dinamika sistem digunakan dua sumbu, yaitu daxis dan qaxis. Sumbu d merupakan sumbu yang mewakili pengaruh kumparan medan dan sumbu q merupakan sumbu yang memiliki pengaruh kumparan redaman. Dengan demikian generator sinkron dimodelkan seperti pada gambar 4, dengan persamaan-persamaan pemodelan sebagai beriku:
Iq
xq
xq
E
E
d d q'
'
(
'
)
'
0=
−
−
−
•τ
...(5) Id xq xq E E E q FD q d ' ' ( ') ' 0 = − + − •τ
...(6)Gambar 4. Model generator s do τ + 1 1 s do τ + 1 1
Σ
d q X X − d q X X − Eq Ed FD E Id Iq + +2.4. Model Sistem Eksitasi
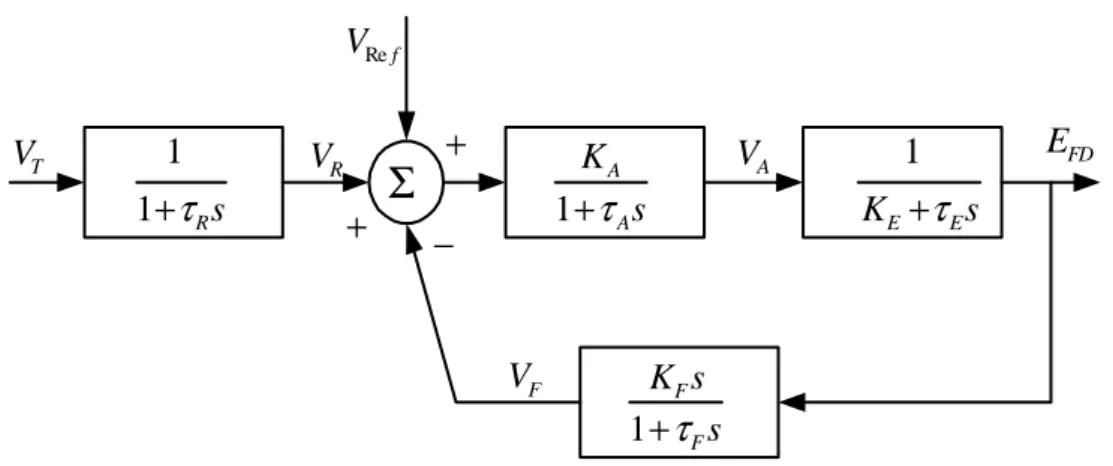
Padyar (1996) menyatakan tujuan utama sistem eksitasi adalah untuk mengontrol arus penguatan medan mesin sinkron. Pada generator, arus penguatan medan dikendalikan untuk mengatur tegangan keluaran generator. Umumnya sistem eksitasi disusun oleh beberapa komponen, yaitu: penyearah, regulator tegangan, komparator/penguat dan exciter. Sistem eksitasi suatu generator berdasarkan model IEEE type 1 ditunjukan seperti pada gambar 5.
f VRe
Σ
K s A Aτ
+ 1 KE+τ
Es 1 s s K F Fτ
+ 1 s Rτ
+ 1 1 F V FD E A V T V VR + + −Gambar 5. Model eksitasi
Dengan
τ
R = konstanta waktu imput regulator, KF = penguatan rangkaian penstabilregulator,
τ
F = konstanta waktu rangkaian penstabil regulator, KA = penguatan regulator, Efd= Tegangan medan,τ
A = konstanta waktu regulator, maka memiliki model state space untuklinierisasi sebagai berikut: ∆ ∆ ∆ • − = R R T R R V V V
τ
τ
1 1 ...(7) ∆ ∆ ∆ •−
=
F F fd F F FE
V
K
V
τ
τ
1
...(8)(
∆ ∆)
∆ ∆ •−
−
=
A A F REF A A AV
V
V
K
V
τ
τ
1
...(9) ∆ ∆ ∆ • − = fd E E A E fd E K V Eτ
τ
1 ...(10)2.5. Model Sistem Pembangkit
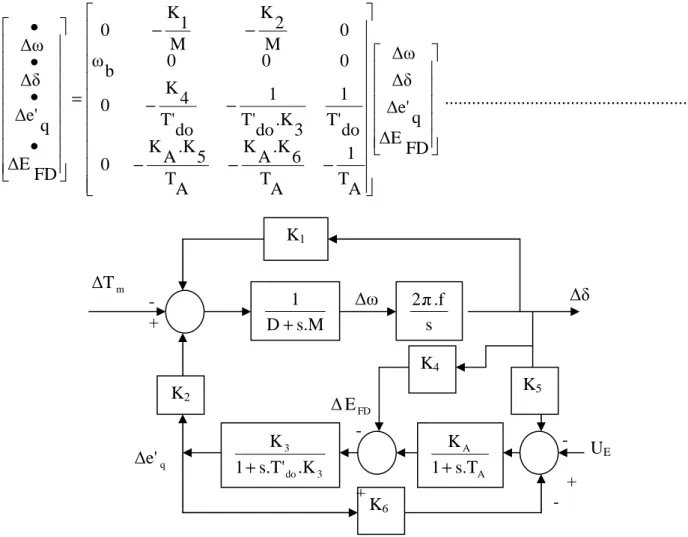
Pengoperasian pembangkit dapat dipahami sebagai interaksi antara sistem prime mover, sistem eksitasi dan generator. Prime mover menghasilkan daya mekanik pada poros dan generator menghasil daya listrik. Menurut Gross (1986), turbin menghasilkan torsi mekanis yang searah dengan perputaran sudu turbin/poros dan torsi mekanis ini akan dilawan oleh torsi elektris. Dalam analisa dinamika yang berkaitan dengan osilasi frekuensi rendah, maka sistem pembangkit menurut Yu (1983) dapat dimodelkan seperti pada gambar 6. Model tersebut memiliki steate space sebagai berikut:
− − − − − − − = • • • • FD ∆E q ∆e' ∆δ ∆ω A T 1 A T 6 .K A K A T 5 .K A K 0 do T' 1 3 .K do T' 1 do T' 4 K 0 0 0 0 b ω 0 M 2 K M 1 K 0 FD ∆E q ∆e' ∆δ ∆ω ...(11)
Gambar 6. Model sistem pembangkit
2.6. Sistem Dua Mesin
Menurut Stevenson (1996) analisa pada sistem dua pembangkit dapat dilakukan dengan menggabungkan menjadi satu mesin, yaitu sebagai ekivalen yang seakan-akan rotornya digandeng secara mekanis. Sehingga dapat ditentukan persamaan ayunannya secara bersama-sama. Bila masing-masing mesin memiliki persamaan ayunan sebagai berikut :
1 1 2 1 2 1 Pm Pe dt d M
δ
= − ...(12) 2 2 2 2 2 2 Pm Pe dt d Mδ
= − ...(13) Maka mesin dapat dianggap saling melekat (coherent) yang berarti berayun secara bersama-sama, dengan menjumlahkan kedua persamaan ayunan diperoleh hubungan interaksi antara kedua mesin, yaitu : 2 2 1 1 2 2 2 2 2 1 2 1 Pm Pe Pm Pe dt d M dt d Mδ
+δ
= − + − ...(14) ) ( ) ( ) ( 2 1 2 1 2 2 2 1 Pm Pm Pe Pe dt d M M +δ
= + − + ...(15) Persamaan 2.35 tersebut serupa dengan persamaan untuk mesin tunggal, yaitu dengan M=M1+M2, Pm=Pm1+Pm2 dan Pe=Pe1+Pe2.Tetapi apabila sifat kestabilan mesin dalam sistem relatif terhadap prilaku dinamis mesin lainnya, maka mesin tersebut tidak coherent. Maka persamaan pasangan mesin tersebut dapat dinyatakan sebagai berikut :
s.M D 1 + s .f π 2. ∆δ K1 m ∆T K2 3 do 3 .K s.T' 1 K + A A s.T 1 K + K5 K4 K6 ∆ω UE FD E ∆ q ∆e' - + - - + - - +
Mulai
Baca data
Analisa aliran daya Masukan data generator
dan parameter saluran
Masukan Beban
Convergen ?
Berikan branch tripping Tidak Blackout ? Ya Tida PSS ? Selesai Analisa respon pembangkit Ya Desain PSS Ya Tidak Selesai ) ( ) ( 1 1 2 2 2 2 2 2 2 1 2 1 Pm Pe Pm Pe dt d M dt d M
δ
−δ
= − − − ...(16) − − − + = − + 2 2 2 1 1 1 2 1 2 1 2 2 1 2 2 1 2 1 ( ) ( ) . . ) ( . . M P P M P P M M M M dt d M M M Mδ
δ
m e m m ...(17) Sehingga untuk dua mesin yang tidak coherent didapatkan :12 12 2 12 2 12 Pm Pe dt d M
δ
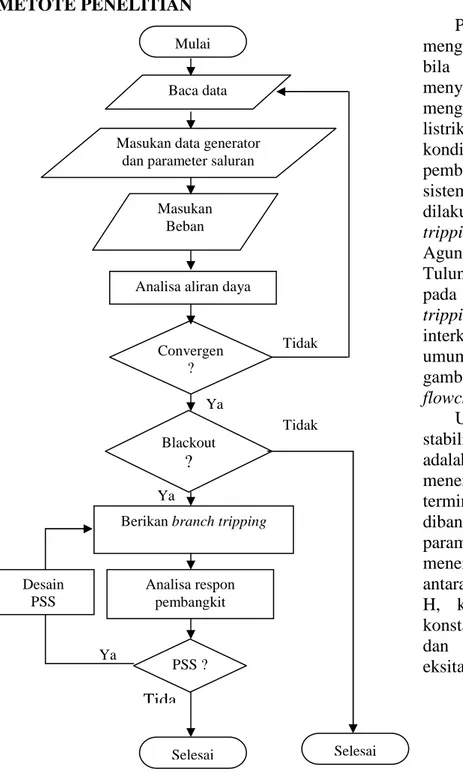
= − ...(18) 3. METOTE PENELITIANPenelitian ini dilakukan untuk mengetahui respon tiap pembangkit bila terjadi gangguan yang menyebabkan kota Malang mengalami blackout atau pemadaman listrik total, sehingga diketahui kondisi osilasi atau stabil setiap pembangkit saat interkoneksi ke sistem Jawa Bali terlepas. Analisis dilakukan dengan memberi branch tripping pada sisi selatan di Kebon Agung, yaitu pada interkoneksi ke Tulung Agung dan Blitar. Sedangkan pada sisi utara dibemberikan branch tripping di Lawang yang merupakan interkoneksi ke Pasuruan. Secara umum tahapan analisa seperti pada gambar 7, yaitu tersaji dalam urutan flowchart.
Untuk mendukung analisa stabilitas, maka data-data digunakan adalah data aliran daya untuk menentukan tegangan-tegangan setiap terminal dan besarnya daya yang dibangkitkan, data parameter-parameter generator sinkron untuk menentukan dinamika tanggapan, antara lain meliputi konstanta inersia H, konstanta sinkron/transien dan konstanta-konstanta waktu generator dan parameter-parameter sistem eksitasi.
4. HASIL PENELITIAN DAN PEMBAHASAN 4.1. Sistem Tenaga Listrik yang Diteliti
Sistem tenaga listrik yang ditinjau adalah sistem tenaga listrik di Malang yang merupakan interkoneksi ke Region 4 melalui Pasuruan, sistem tenaga lisrik tersebut juga berinterkoneksi dengan Tulung Agung melalui Blitar. Selain itu, sistem tenaga listrik di Region 4 mencakup interkoneksi antara Jawa Timur ke Madura dan Jawa Timur ke Bali, kedua interkoneksi itu melalui saluran kabel bawah laut 150 kV. Sistem tenaga listrik di Region 4 memiliki pembangkit yang tersambung ke sistem 500 kV pada sistem tenaga listrik di pulau Jawa, yaitu pembangkit di Paiton, Grati dan Gresik. Beban puncak sistem tenaga listrik di Region 4 sekitar 3.178,01 MW dan 1.163,441 Mvar, dengan rincian beban di Madura 109,11 MW dan 42,9 Mvar, beban di Bali 336,3 MW dan 118,8 Mvar, serta beban di Jawa Timur 2.732,6 MW dan 1.001,741 Mvar.
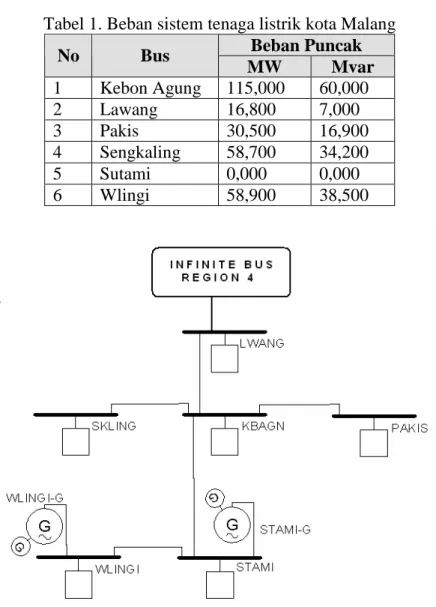
Sedangkan sistem tenaga listrik di kota Malang ditinjau pada sisi 150 kV, karena pada sistem tenaga listrik di Malang tidak memiliki sistem 500 kV, serta untuk sistem 70 kV dan tegangan rendah dikonversikan ke sistem 150 kV dengan mempertimbangkan semua interkoneksi dan kompensasi setiap sistem dan beban yang ada. Sehingga seluruh beban di Malang pada sisi 150 kV di Lawang sebesar 16,800 MW dan 7,000 Mvar, Kebon Agung sebesar 115,000 MW dan 60,000 Mvar, Pakis 30,500 MW dan 16,900 Mvar, Sengkaling 58,700 MW dan 34,200 Mvar dan Wlingi Wlingi 58,900 MW dan 38,500 Mvar.
Tabel 1. Beban sistem tenaga listrik kota Malang
Beban Puncak No Bus MW Mvar 1 Kebon Agung 115,000 60,000 2 Lawang 16,800 7,000 3 Pakis 30,500 16,900 4 Sengkaling 58,700 34,200 5 Sutami 0,000 0,000 6 Wlingi 58,900 38,500
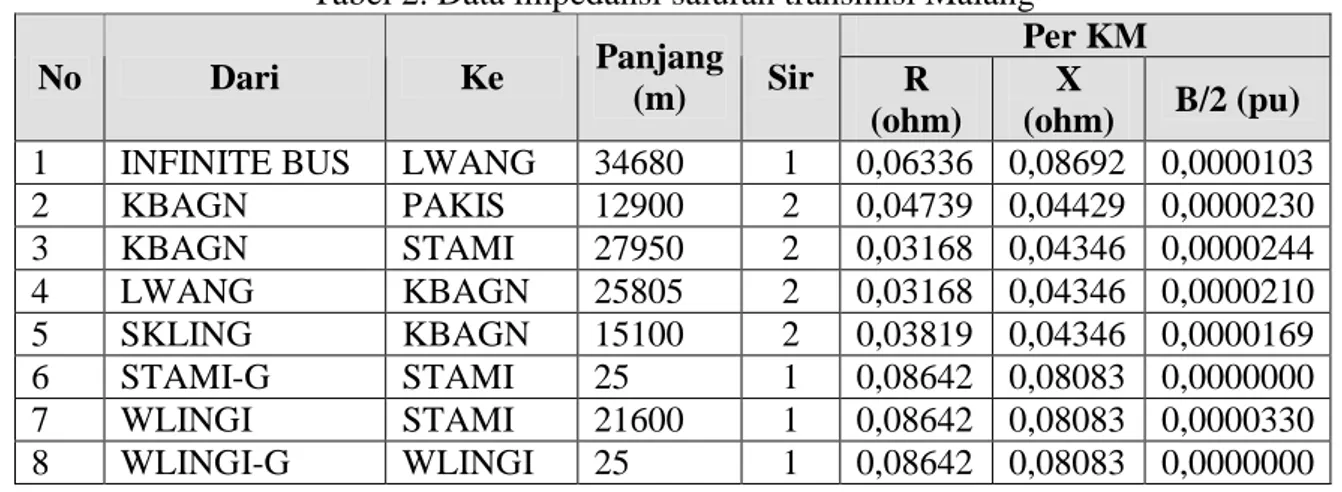
Data impedansi saluran transmisi pada sistem tenaga listrik di Malang untuk setiap antar daerah di kota Malang ditunjukan pada tabel 2.
Tabel 2. Data impedansi saluran transmisi Malang
Per KM No Dari Ke Panjang (m) Sir R (ohm) X (ohm) B/2 (pu)
1 INFINITE BUS LWANG 34680 1 0,06336 0,08692 0,0000103
2 KBAGN PAKIS 12900 2 0,04739 0,04429 0,0000230 3 KBAGN STAMI 27950 2 0,03168 0,04346 0,0000244 4 LWANG KBAGN 25805 2 0,03168 0,04346 0,0000210 5 SKLING KBAGN 15100 2 0,03819 0,04346 0,0000169 6 STAMI-G STAMI 25 1 0,08642 0,08083 0,0000000 7 WLINGI STAMI 21600 1 0,08642 0,08083 0,0000330 8 WLINGI-G WLINGI 25 1 0,08642 0,08083 0,0000000
4.2. Aliran Daya Pada Sistem Tenaga Listrik di Malang
Aliran daya dianalisa menggunakan metode Newton Raphson, perhitungan ini dilakukan untuk mengetahui besarnya aliran daya setiap saluran dan tegangan setiap bus pada sistem tenaga listrik di Malang. Hasil perhitungan aliran daya menggunakan metode Newton Raphson ditunjukan pada tabel 3.
Tabel 3. Aliran daya sistem tenaga listrik di Malang
Lokasi Kiriman Daya
Dari Rugi Daya
1 2 1 2 No Dari Ke kV Drop (%) (MW) (Mvar) (KW) (Kvar)
1 INFINITE BUS LWANG 1,71 95,566 53,791 1252,4 1291,4
2 KBAGN PAKIS 0,13 30,537 16,015 36,7 -885,0 3 KBAGN STAMI 0,53 -80,133 -35,432 337,8 -519,1 4 LWANG KBAGN 0,87 125,089 74,580 852,4 320,9 5 SKLING KBAGN 0,26 -58,700 -34,200 132,9 -523,5 6 STAMI-G STAMI 0,06 105,000 45,600 55,8 52,2 7 WLINGI STAMI 0,30 -23,908 -11,908 64,7 -1273,0 8 WLINGI-G WLINGI 0,02 35,000 26,600 8,3 7,8
Aliran daya pada sistem tenaga di Malang memiliki drop tegangan terbesar pada bus Lawang, yaitu sekitar 1,71 %. Sedangkan losses terbesar terjadi pada saluran antara Infinite Bus dengan Lawang, yaitu sekitar 1.252,4 KW.
4.3. Respon Generator Pada Pembangkit
Jika terjadi gangguan maka pembangkit akan merasakan gangguan tersebut, respon pembangkit Sutami yang berupa daya elektrik dan tegangan saat terjadi gangguan yang mengakibatkan Malang keluar dari seluruh interkoneksi ditunjukkan pada gambar 9 dan gambar 10.
a. Respon daya elektrik dan tegangan pembangkit Sutami
b. Respon daya elektrik dan tegangan pembangkit Wlingi Gambar 9. Respon tegangan pembangkit Sutami
Pada gambar 9.a. ditunjukan respon generator pembangkit Sutami apaila terjadi gangguan, respon tersebut menunjukan bahwa terjadi osilasi saat adanya gangguan yang dirasakan oleh pembangkit. Pada pembangkti Sutami selain mengalami osilasi pada daya elektrik dan terjadi perubahan daya pembangkitan. Sedangkan pada tegangan terjadi overshoot sebesar 0,968 pu pada 0,5 detik setelah gangguan terjadi dan tegangan berubah dari 0,948 pu menjadi 0,952 pu pada saat setabil kembali.
Selain itu pembangkit Wlingi juga memberikan respon yang berupa daya elektrik dan tegangan saat terjadi gangguan yang mengakibatkan Malang keluar dari seluruh interkoneksi ditunjukkan pada gambar 9.b. Perubahan tegangan terjadi pada pembangkit Wlingi dari 0,944 pu menjadi 0,946 pu dan overshoot yang terjadi selama osilasi sebesar 0,962 pada 0,53 detik setelah gangguan terjadi.
5. PENUTUP 5.1. Kesipmulan
Berdasarkan hasil analisa aliran daya drop tegangan terbesar pada bus Lawang, yaitu 1,71 %. Sedangkan losses terbesar terjadi pada saluran antara Infinite Bus dengan Lawang, yaitu 1.252,4 KW. Selain itu, adanya blackout yang terjadi menyebabkan pada pembangkit mengalami perubahan daya elektrik dan mengalami osilasi.
5.2. Saran-saran
Untuk meningkatkan unjuk kerja sistem, perlu dilakukan penelitian lanjutan pada penggunaan power system stabilizer pada pembangkit.
6. DAFTAR PUSTAKA
Gross, Charles A. 1986. “Power System Analysis”. John Wiley & Sons. Singapore. Kundur, P. “Power System Stability and Control”. McGraw Hill. New York.
Nagrath, I.J., Kothari, D.P. 1989. “Modern Power System Analysis”. Tata Mc Graw Hill. New Delhi.
Padyar, K.R. 1996. “Power System Dynamics-Stability and Control”. John Wiley & Sons. Singapore.
Stevenson, 1998. “Power System Analisys”, McGraw Hill. Singapore. Sadaat, H. 1999. “Power System Analysis”. McGraw Hill. Singapore.