9
Pada bab ini akan dibahas mengenai perancangan sistem dan realisasi perangkat keras, konstruksi fisik dan perangkat lunak dari setiap modul yang mendukung alat secara keseluruhan. Secara lengkap, alat yang dirancang dan direalisasikan dapat dilihat pada Gambar 2.1. Perancangan perangkat keras meliputi mekanik dan elektronik, sedangkan perancangan perangkat lunak berupa baris-baris program yang diunduhkan pada mikrokontroler.
3.1 Cara Kerja Sistem
Robot penyapu lantai ini dirancang mempunyai 2 (dua) mode penggunaan, yaitu mode acak dan zig-zag.
3.1.1 Mode Acak
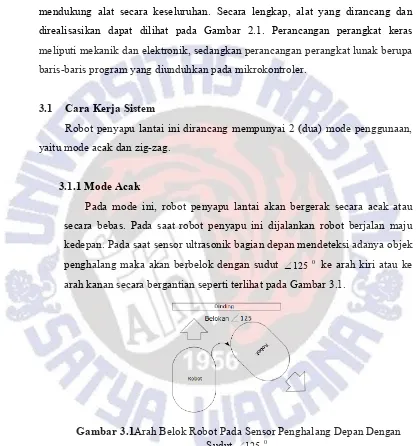
Pada mode ini, robot penyapu lantai akan bergerak secara acak atau secara bebas. Pada saat robot penyapu ini dijalankan robot berjalan maju kedepan. Pada saat sensor ultrasonik bagian depan mendeteksi adanya objek penghalang maka akan berbelok dengan sudut 125 0 ke arah kiri atau ke arah kanan secara bergantian seperti terlihat pada Gambar 3.1.
Gambar 3.1Arah Belok Robot Pada Sensor Penghalang Depan Dengan
Sudut 1250
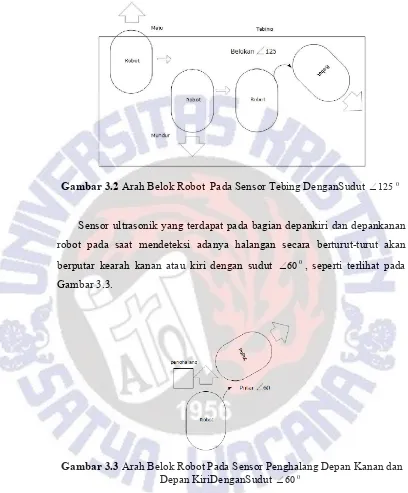
dengan sudut 1250kearah kiri atau ke arah kanan secara bergantian seperti terlihat pada Gambar 3.2.
Gambar 3.2 Arah Belok Robot Pada Sensor Tebing DenganSudut 1250
Sensor ultrasonik yang terdapat pada bagian depankiri dan depankanan robot pada saat mendeteksi adanya halangan secara berturut-turut akan berputar kearah kanan atau kiri dengan sudut 600, seperti terlihat pada Gambar 3.3.
Gambar 3.3 Arah Belok Robot Pada Sensor Penghalang Depan Kanan dan
Depan KiriDenganSudut 600
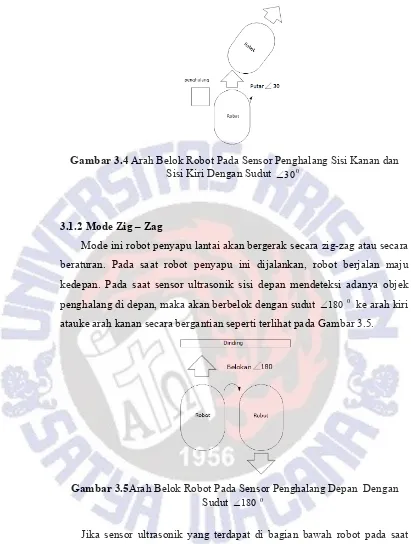
Gambar 3.4 Arah Belok Robot Pada Sensor Penghalang Sisi Kanan dan Sisi Kiri Dengan Sudut 300
3.1.2 Mode Zig – Zag
Mode ini robot penyapu lantai akan bergerak secara zig-zag atau secara beraturan. Pada saat robot penyapu ini dijalankan, robot berjalan maju kedepan. Pada saat sensor ultrasonik sisi depan mendeteksi adanya objek penghalang di depan, maka akan berbelok dengan sudut 1800 ke arah kiri atauke arah kanan secara bergantian seperti terlihat pada Gambar 3.5.
Gambar 3.5Arah Belok Robot Pada Sensor Penghalang Depan Dengan
Sudut 1800
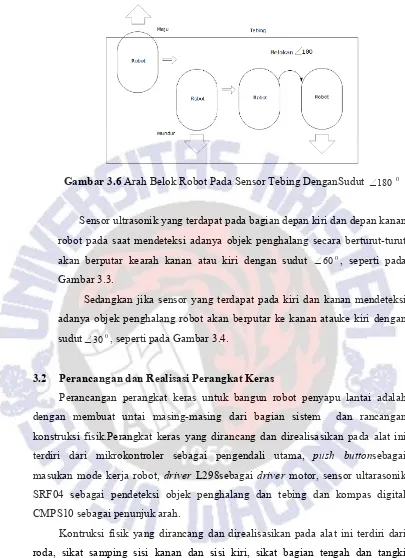
Gambar 3.6 Arah Belok Robot Pada Sensor Tebing DenganSudut 1800
Sensor ultrasonik yang terdapat pada bagian depan kiri dan depan kanan robot pada saat mendeteksi adanya objek penghalang secara berturut-turut akan berputar kearah kanan atau kiri dengan sudut 600, seperti pada Gambar 3.3.
Sedangkan jika sensor yang terdapat pada kiri dan kanan mendeteksi adanya objek penghalang robot akan berputar ke kanan atauke kiri dengan sudut300, seperti pada Gambar 3.4.
3.2 Perancangan dan Realisasi Perangkat Keras
Perancangan perangkat keras untuk bangun robot penyapu lantai adalah dengan membuat untai masing-masing dari bagian sistem dan rancangan konstruksi fisik.Perangkat keras yang dirancang dan direalisasikan pada alat ini terdiri dari mikrokontroler sebagai pengendali utama, push buttonsebagai masukan mode kerja robot, driver L298sebagai driver motor, sensor ultarasonik SRF04 sebagai pendeteksi objek penghalang dan tebing dan kompas digital CMPS10 sebagai penunjuk arah.
3.2.1 Push Button
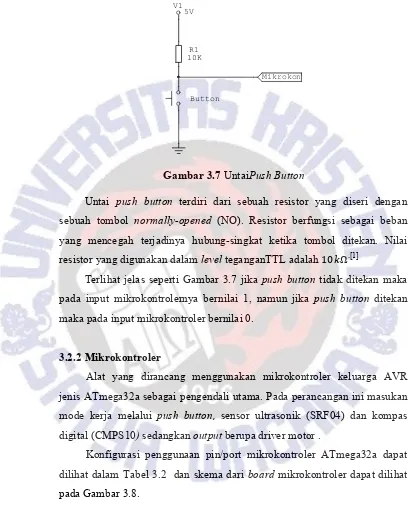
Modul push button yang digunakan adalah aktif low (pull up). Bentuk dari push button ditunjukkan oleh Gambar 3.7.
Gambar 3.7 UntaiPush Button
Untai push button terdiri dari sebuah resistor yang diseri dengan sebuah tombol normally-opened (NO). Resistor berfungsi sebagai beban yang mencegah terjadinya hubung-singkat ketika tombol ditekan. Nilai resistor yang digunakan dalam level teganganTTL adalah 10 Ω.[1]
Terlihat jelas seperti Gambar 3.7 jika push button tidak ditekan maka pada input mikrokontrolernya bernilai 1, namun jika push button ditekan maka pada input mikrokontroler bernilai 0.
3.2.2 Mikrokontroler
Alat yang dirancang menggunakan mikrokontroler keluarga AVR jenis ATmega32a sebagai pengendali utama. Pada perancangan ini masukan mode kerja melalui push button, sensor ultrasonik (SRF04) dan kompas digital (CMPS10) sedangkan output berupa driver motor .
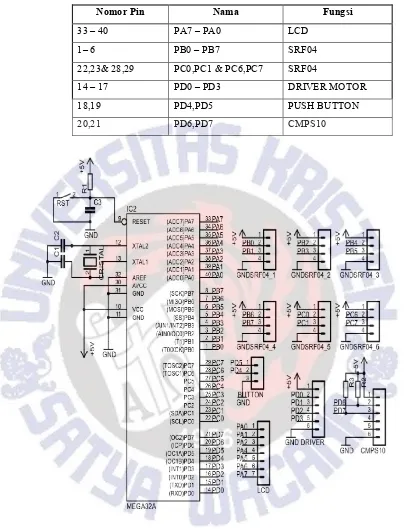
Konfigurasi penggunaan pin/port mikrokontroler ATmega32a dapat dilihat dalam Tabel 3.2 dan skema dari board mikrokontroler dapat dilihat pada Gambar 3.8.
R1 10K V15V
Button
Tabel 3.1 Konfigurasi Penggunaan PIN/PORT Mikrokontroler ATmega32a
Nomor Pin Nama Fungsi
33 – 40 PA7 – PA0 LCD
1– 6 PB0 – PB7 SRF04
22,23& 28,29 PC0,PC1 & PC6,PC7 SRF04
14 – 17 PD0 – PD3 DRIVER MOTOR
18,19 PD4,PD5 PUSH BUTTON
20,21 PD6,PD7 CMPS10
3.2.3 Modul Sensor Ultrasonik (SRF04)
Sensor ultrasonik digunakan untuk mendeteksi dan mengukur jarak sensor terhadap objek penghalang yang berada di depan sensor. Alasan pemilihan menggunakan sensor ultrasonik adalah karena tidak terpengaruhi oleh warna halangan maupun intensitas cahaya di sekelilingnya. Sensor ultrasonik bekerja pada frekuensi sekitar 40kHz.[3]
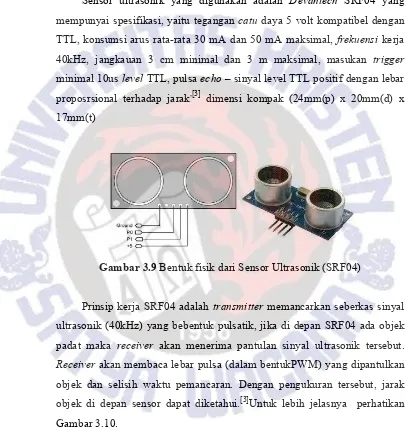
Sensor ultrasonik yang digunakan adalah Devantech SRF04 yang mempunyai spesifikasi, yaitu tegangan catu daya 5 volt kompatibel dengan TTL, konsumsi arus rata-rata 30 mA dan 50 mA maksimal, frekuensi kerja 40kHz, jangkauan 3 cm minimal dan 3 m maksimal, masukan trigger
minimal 10us level TTL, pulsa echo – sinyal level TTL positif dengan lebar proposrsional terhadap jarak,[3] dimensi kompak (24mm(p) x 20mm(d) x 17mm(t)
Gambar 3.9 Bentuk fisik dari Sensor Ultrasonik (SRF04)
Prinsip kerja SRF04 adalah transmitter memancarkan seberkas sinyal ultrasonik (40kHz) yang bebentuk pulsatik, jika di depan SRF04 ada objek padat maka receiver akan menerima pantulan sinyal ultrasonik tersebut.
Receiver akan membaca lebar pulsa (dalam bentukPWM) yang dipantulkan
objek dan selisih waktu pemancaran. Dengan pengukuran tersebut, jarak objek di depan sensor dapat diketahui.[3]Untuk lebih jelasnya perhatikan Gambar 3.10.
pulsa 100us-18ms pada outputnya tergantung pada informasi jarak pantulan objek yang diterima. [3]
Gambar 3.10 Diagram Waktu Sensor Ultrasonik[3]
Dalam menentukan jarak robot terhadap objek penghalang menggunakan rumus:
2
t v
D (3.1)
Dimana :
D = Jarak (m)
v = Kecepatan suara 340 m/s t = Waktu pantulan (s)
Untuk mengetahuikecepatan suara terhadap perubahan waktu digunakan rumus:[2]
1 2
t
t
t
(3.2)Gambar 3.11 Cara Kerja Pemancar dan Penerima Sensor Ultrasonik
3.2.4 Modul Driver Motor
Modul ini memiliki komponen utama sebuah
servo yang dapat dengan mudah dikendalikan dari mikrokontroler secara langsung. Modul yang ditunjukkan
ICdriver L298 yang memiliki kemampuan mengg
dengan 4 amper
Gambar 3.12
Spesifikasi
1) TeganganOperasi
2) Total Arus DC yang mampu dilewatkan sampai dengan ampere
3) Arus kerja 4) Ukuran
Driver Motor
Modul ini memiliki komponen utama sebuah chip driver
servo yang dapat dengan mudah dikendalikan dari mikrokontroler secara langsung. Modul yang ditunjukkan pada Gambar 3.12 menggunakan L298 yang memiliki kemampuan menggerakkan motor DC sampai dengan 4 amper dan tegangan maksimum 40 volt DC untuk satu kanalnya
Gambar 3.12 Bentuk Fisik Modul Driver Motor (L298)
Spesifikasi:
TeganganOperasi: 5-46V
Total Arus DC yang mampu dilewatkan sampai dengan mpere.
Arus kerja:500mA
Ukuran: 49.0mm(X) x 45.4mm(Y) x 1.9mm(Z)
chip driver motor DC servo yang dapat dengan mudah dikendalikan dari mikrokontroler secara pada Gambar 3.12 menggunakan kan motor DC sampai dan tegangan maksimum 40 volt DC untuk satu kanalnya.[3]
(L298)
Total Arus DC yang mampu dilewatkan sampai dengan 4
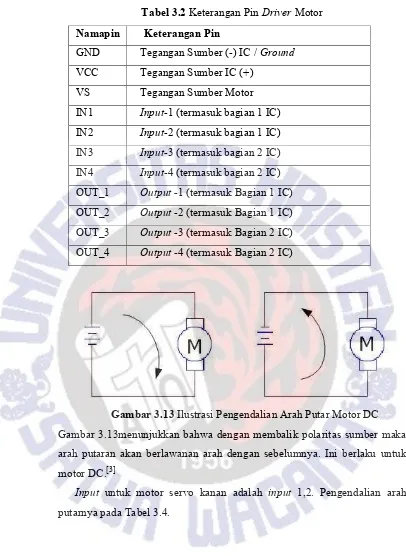
Tabel 3.2 Keterangan Pin Driver Motor
Gambar 3.13 Ilustrasi Pengendalian Arah Putar Motor DC
Gambar 3.13menunjukkan bahwa dengan membalik polaritas sumber maka arah putaran akan berlawanan arah dengan sebelumnya. Ini berlaku untuk motor DC.[3]
Input untuk motor servo kanan adalah input 1,2. Pengendalian arah putarnya pada Tabel 3.4.
Namapin Keterangan Pin
GND Tegangan Sumber (-) IC / Ground
VCC Tegangan Sumber IC (+) VS Tegangan Sumber Motor
IN1 Input-1 (termasuk bagian 1 IC)
IN2 Input-2 (termasuk bagian 1 IC)
IN3 Input-3 (termasuk bagian 2 IC)
IN4 Input-4 (termasuk bagian 2 IC)
Tabel 3.3 Sistem Pengendalian Driver Motor
Input Function
Enable =H Input 1 = H
Input 1 = Input 2 Motor Berhenti Cepat Enable=L Input 1 = x
Gambar 3.14 UntaiDriver Motor Dengan H-BRIDGE
Cara Kerja:
1) Jika Vinput1 diberi logika ‘1’ (5 volt) dan Vinput2 diberi logika ‘0’ (dibawah 1 volt) maka Q1 dan Q4 akan aktif/ saturasi, Q2 dan Q3 akan
off / cut off. Hal ini menyebabkan Vo1 bernilai sebesar Vmotor dan Vo2ground / 0 volt.[3]
2) Jika Vinput1 diberi logika ‘0’ (dibawah 1 volt) dan Vinput2 diberi logika ‘1’ (5 volt) maka Q1 dan Q4 akan off / cut off, Q2 dan Q3 akan aktif / saturasi. Hal ini menyebabkan Vo1 bernilai ground / 0 volt dan Vo2 sebesar Vmotor (berlawanan arah dengan kondisi nomor 1)[3]
3) Jika Vinput1 diberi logika ‘1’ (5 volt) dan Vinput2 diberi logika ‘1’ (5 volt) maka Q1 dan Q4 akan aktif/ saturasi, Q2 dan Q3 akan aktif / saturasi juga. Hal ini menyebabkan hubungan singkat atau short karena Vmotor dan ground terhubung. Kondisi ini terlarang, jadi harus dihindari saat pemograman.[3]
3.2.5 Kompas Digital (CMPS10)
Sensor CMPS10 terdiri dari magnetometer 3-axis dan accelerometer 3-axis serta mengunakan prosesor 16-bit, CMPS10 telah dirancang untuk mengurangi kesalahan yang disebabkan oleh miringnya PCB. CMPS10 menghasilkan hasil nilai keluaran dari 0-3599 mewakili 0-359.9 atau 0 sampai 255. Sedangkan CMPS10 membutuhkan power supply pada tegangan 3,3 - 5V dan arus minimal 25mA. Untuk mengakses sensor CMPS10 ada 3 cara yaitu dengan antarmuka serial, antarmuka I2C atau
output PWM.[5]
Gambar 3.15 Bentuk Fisik Dari Sensor Kompas Digital (CMPS10)
Pada CMPS10 ini cara mengaksesnya dengan mengunakaninterface
3.2.6 Catu Daya
Baterai merupakan sumber daya utama untuk seluruh untai pada Robot penyapu lantai. Baterai yang digunakan adalah Lipo Zippy 7,4 volt dengan arus kerja 6000mAh. Seperti yang ditunjukkan pada Gambar 3.17. Baterai tersebut disusun secara paralel sebanyak 2 (dua) buah, sehingga mendapatkan arus kerja 12.000mAh.
Gambar 3.16Bentuk Fisik BateraiLipo Zippy 6000mA. 7,4V
Gambar 3.17 Untai Regulator Tegangan 5 volt
3.3 Perancangan Perangkat Lunak
Belok Kiri 120
Ada Halangan
Bawah ?
Prosedur Mundur
Belok Kanan 120 No
Belok Kiri 180
Ada Halangan
Bawah ?
Prosedur Mundur
Belok Kanan 180
END
3.3.1 Penjelasan Diagram Alir
1. Pada saat sistem diaktifkan, maka mikrokontroler akan mengaktifkan pilihan mode.
2. Terdapat 2 modepilihan penggunaan. a) Mode acak
1) Pada saat push button mode acakditekan maka robot akan bekerja maju kedepan sambil melakukan proses menyapu. 2) Pada saat sensor depan mendeteksi adanya halangan maka
akan berbelok dengan sudut ∠120 .
3) Pada saat sensor depan kiri dan depan kanan mendeteksi adanya halangan maka robot akan berputar denan sudut ∠60 .
4) Pada saat sensor sisi kiri dan sisi kanan mendeteksi adanya halangan maka robot akan berputar dengan sudut ∠30 . 5) Pada saat sensor bawah mendeteksi adanya tebing, maka
robot akan mundur dan berbelok ke kiri atau ke kanan dengan sudut∠120 .
b) ModeZig – zag
1) Pada saat push button mode zig - zag ditekan maka robot akan bekerja maju kedepan sambil melakukan proses menyapu.
2) Pada saat sensor depan mendeteksi adanya halangan maka akan berbelok dengan sudut ∠180 .
3) Pada saat sensor depan kiridan depan kanan mendeteksi adanya halangan maka robot akan berputar dengan sudut∠60 .
4) Pada saat sensor sisi kiri dan sisi kanan mendeteksi adanya halangan maka robot akan berputar dengan sudut∠30 . 5) Pada saat sensor bawah mendeteksi adanya tebing, maka
3.4 Konstruksi Fisik
Konstruksi fisik dari badan robot penyapu lantai ini menggunakan akrilik 3mm,menjadi dasar tumpuan dari elektronik dan software. Kostruksi fisik utama robot penyapu laintai adalah bagian roda, penyapu samping, penyapu tengah, tangki penampung sampah dan kipas vacuum robot.
3.4.1Roda
Konstruksi roda menggunakan akrilik dengan tebal 3mm, ada pun diameter lingkaran roda 5,1 cm dan tebal dari roda 1,5 cm. Roda dari robot terletak disamping kanan bawah dan kiri bawah robot.
(a) (b)
(c)
Gambar 3.19Bentuk Fisek Dari Roda Penggerak
(a). Tebal Roda. (b). Diameter Roda. (c). Penempatan Roda Pada Robot.
3.4.2Penyapu Sisi Kanan dan Sisi Kiri
berputar berlawanan arah putar jarum jam. Diameter dari penyapu adalah 13 cm dan jari – jari dari penyapu 6,5 cm.
(a) (b)
Gambar 3.20 Bentuk Fisik Penyapu Samping
(a) Penyapu samping. (b) Penempatan Penyapu Pada Robot
3.4.3Penyapu Tengah
Konstruksi penyapu tengah berbentuk roll yang berfungsi sebagai penyapu. Seperti yang ditunjukkan pada Gambar 3.22. Penyapu tengah juga berfungsi sebagai pengangkat debu atau sampah ke atas sambil di sedot oleh
vacuum.
Penyapu tengah mempunyai panjang 12,2 cm dan diameter 2,7 cm. Penyapu di hubungkan dengan motor penggerak menggunakan slat belt. Sedangkan pengerak dari penyapu ini menggunakan motor dc seperti pada Gambar 3.24 (a).
3.4.4Penampung Sampah
Gambar 3.21 Bentuk Fisik Penyapu Tenganh
(a) (b)
Gambar 3.22 Pemasangan (a)Belt dan (b) Penyapu Tengah Pada Robot
(a) (b)
Gambar 3.23 Bentuk FisikTangki Penampung
(a) Tangki. (b) Filter Sampah dan Debu
3.4.5Kipas Vacuum
Kontruksi kipas vacuum yang terletak di bagian belakang tengah, yang berfungsi sebagai penghisapdebu.Tampak pada Gambar 3.24 di mana bentuk fisik dari kipas vacuum yang digunakan pada robot penyapu lantai ini.
Dimensi dari kipas vacuum diameter kipas 8,8 cm, diameter dari lubang 3,7 cm dan tebal dari kipas 3,5 cm
(a) (b)
Gambar 3.24 Bentuk Fisik Dari Kipas Vacuum.
3.4.6Hasil Perancangan
Gambar 3.25, 3.26, 3.27 dan 3.28 menunjukkan hasil dari keseluruhan kontruksi atau perancangan dari tiap – tiap bagian dari rangkaian elektronik dan bentuk fisik dari Robot Penyapu Lantai ini.
Gambar 3.25 Robot Tampak Belakang
Gambar 3.27 Robot Tampak Samping Kanan
![Gambar 3.10 Diagram Waktu Sensor Ultrasonik[3]](https://thumb-ap.123doks.com/thumbv2/123dok/852906.471224/8.595.100.508.107.640/gambar-diagram-waktu-sensor-ultrasonik.webp)